
Abstract
Key message
A model for sustainable planning of urban tree stocks is proposed, incorporating growth, mortality, replacement rates and ecosystem service provision, providing a basis for planning of urban tree stocks.
Abstract
Many recent studies have improved the knowledge about urban trees, their structures, functions, and ecosystem services. We introduce a concept and model for the sustainable management of urban trees, analogous to the concept of sustainable forestry developed by Carl von Carlowitz and others. The main drivers of the model are species-specific tree diameter growth functions and mortality rates. Based on the initial tree stock and options for the annual replanting, the shift of the distribution of the number of trees per age class can be predicted with progressing time. Structural characteristics such as biomass and leaf area are derived from tree dimensions that can be related to functions such as carbon sequestration or cooling. To demonstrate the potential of the dynamic model, we first show how different initial stocks of trees can be quantitatively assessed by sustainability indicators compared to a target stock. Second, we derive proxy variables for ecosystem services (e.g. biomass for carbon sequestration, leaf area for deposition and shading) from a given distribution of the number of trees per age class. Third, we show by scenario analyses how selected ecosystem services and functions may be improved by combining complementary tree species. We exercise one aspect (cooling) of one ecosystem service (temperature mitigation) as an example. The approach integrates mosaic pieces of knowledge about urban trees, their structures, functions, and resulting ecosystem services. The presented model makes this knowledge available for a sustainable management of urban tree stocks. We discuss the potential and relevance of the developed concept and model for ecologically and economically sustainable planning and management, in view of progressing urbanization and environmental changes.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
At present, more than 55% of the human population worldwide lives in urban areas and its share will increase to 68% until 2050 (United Nations 2018). An increasing attention is paid to the monitoring (Lizée et al. 2011; Nowak et al. 2008), management and planning (Gómez-Baggethun and Barton 2013; Ignatieva et al. 2011) and research (McDonnell et al. 2013) of the urban environment and especially of the urban ecosystems (Pickett and Grove 2009). Consequently, better monitoring, inventory and registry of urban trees have been suggested by various recent studies (Liu et al. 2017; Tanhuanpää et al. 2014). Urban trees were analysed regarding their growth (Gillner et al. 2014; Kjelgren and Clark 1992; Moser-Reischl et al. 2019; Pretzsch et al. 2017), susceptibility to drought stress (Moser et al. 2018a, b; Rötzer et al. 2017), and their manifold ecosystem services (Livesley et al. 2016; Moser et al. 2015; Nowak and Crane 2002; Rahman et al. 2020a; Roy et al. 2012; Samson et al. 2019). Among others, their contribution to air pollution removal (Grote et al. 2016; Nowak et al. 2006; Pace et al. 2020), cooling by transpiration and shading (Rahman et al. 2020a, b), habitat and biodiversity maintenance (Alvey 2006; Angold et al. 2006; Muller et al. 2010) and human health (Kan and Chen 2004; Tzoulas et al. 2007) is of particular interest. The impact of global climate warming (McCarthy et al. 2010) may be exacerbated by the urban heat island effect (An et al. 2020; Moser et al. 2018a, b) which both suggest farsighted future tree species selection for urban areas (Ferrini et al. 2014; Khan et al. 2020; Roloff et al. 2009; Watkins et al. 2020). In this context, Rötzer et al. (2019) integrated the knowledge about the tree growth and size-dependent ecosystem services provision into a process-based model at the tree level. A further important step of integration is the use of an improved knowledge base of urban trees for developing management tools for the whole urban tree stocks as suggested by Nowak et al. (2013). Due to the increased relevance of ecosystem services (e.g. due to climate change) and due to the increasing threat to these functions (because tree health could decline e.g. due to drought), the care and management of urban trees is of particular importance. Consequently, protection and perhaps the improvement of the broad set of functions and services of urban trees are priority tasks, especially under climate change.
This study introduces a concept and model for the sustainable management of urban trees, that is in many aspects analogous to the concept of sustainable forestry. In forestry, the concept of sustainability has been developed (von Carlowitz 1713; Morgenstern 2007) and underpinned methodologically (Cotta 1820; Hundeshagen 1826, 1828; Speidel 1972) to maintain a continuous stock and supply of wood by balancing the new establishment and the removal of stands. Under ideal conditions, a forest management block would consist of stand areas which are uniformly distributed over the age classes. For example, a management block with a total area of 1000 hectare and five age classes (e.g., I = 1–20 years, II = 21–40 years … V = 80–100) would ideally consist of 200 ha per 20-years-age class. Assuming that every year the area of the removed and newly established stands is kept the same, there will be a constant stock and sustainable supply of wood and other forest ecosystem services. This may result in a never-ending continuous revenue regarding both goods and services. The concept of sustainability can be ensured by the regulation of the stands' age class distribution (von Gadow 2005) or the trees' diameter distribution (Bachofen 1999; Buongiorno and Michie 1980; Meyer 1952). The concept has been successfully transferred from forestry to sustainable management of vinicultures (Salo and Tahvonen 2002).
Here, we show how to exploit the potential of the newly accumulated knowledge about urban tree growth and how to integrate it into a dynamic management model for the sustainable management of urban tree stocks. We synthesise existing knowledge into a model for sustainable management of urban tree stocks, following the models for sustainable management of wood and other ecosystem services of forests (Speidel 1972; Pretzsch et al. 2008). Traditionally, forest management models scale the individual stands to an entity of a management block unit to model the dynamics of stocks in dependence of growth, mortality and removal, In this way, the long-term consequences of different management options can be assessed by a scenario analysis. As we adapt this concept to model urban tree stocks we start with an introduction of this concept and its formalization.
Assuming a uniform distribution of trees over the age classes as shown in Fig. 1a, no mortality of the trees until age 100 will appear along with a continuous refilling of the first age class by replanting the losses of the oldest age class. This constellation enables a sustainable provision with tree numbers, biomass, and associated ecosystem services. Such a regime is analogous to the "Normal Forest" by Hundeshagen (1826, 1828). He proposed a uniform distribution of stand age classes across forested areas for keeping a sustainable forest growth and yield. In case of a rotation of 100 years this is achieved by an annually cut and replanting of 10 ha for a given forest area of 1000 ha. The assumed uniform distribution in Fig. 1a is purely theoretical. In reality, the mortality increases with increasing age. And the age class distribution for a sustainable number of trees in urban areas or of a stand area in forest management decreases progressively as shown in Fig. 1b. In reality, the age class distribution that guarantees a sustainable provision with goods and services deviates from uniformity. It is rather a degressively decreasing distribution (Fig. 1b) called target age class distribution or "Target Forest" (Hanewinkel et al. 2011). To maintain the target age class distribution requires much higher replanting numbers to compensate for the mortality on the way from the young to the mature state. In Fig. 1b the black solid line represents the target distribution which is necessary to keep a steady state in case of a defined number of total trees per city or quarter. The current age class distribution may deviate from the target distribution. For instance, Fig. 1c and d, represent an overshoot of young trees and an overshoot of old trees, respectively. The deviation from the target distribution becomes obvious by comparing the current distribution (e.g., as a result of an inventory or city tree register evaluation) with the target distribution. Any deviations should be remedied, as on the long term they cause an under- or overprovision of services. They also cause peaks of replanting measures and labour costs; with other words, they cause non-sustainability.

Normal urban tree stock, target stock and deviations between current and target stock show for a stock of 1000 trees in an area of 100 hectare, i. e., a mean density of urban trees of 10 trees per ha. a normal age class distribution distribution and b target age class distribution of 1000 tree per 100 ha. Comparison of current age class distributions (thin columns) with the target distribution (bold lines) for (c) an example with an overstock of young trees and lack of old trees and (d) a lack of young trees and a slight overstock of old trees
The sustainable management of a stock of urban trees requires basic information similar to sustainable forest management: the initial stock, the growth, the mortality, and the replacement by planting. Analogous to the management of forest units, urban trees may be assigned to age classes. In this way, their development can be modelled by the transition of the trees from one to the next age class, by their drop out and the replanting on planting places, available after drop out of trees due to stress or senescence. In both forests and cities, the available area for growing trees is an important constraint. In forests many trees drop out between planting or natural regeneration and old age due to inter-tree competition or harvest. Without competition and removal by harvest, trees in cities would ideally survive from being planted as individuals of several years until old age. However, stress or security reasons also reduce their survival rate, but not on the low level of forest trees. The composition of the forests management block is commonly characterized as the stand area in hectare per age class. The composition of urban tree stocks may be quantified as the number of individual trees per age class. The model concept for urban tree stocks may be similar to the "Normal Forest" and "Target Forest" models in forestry, it requires three main adaptations: the characterization of the stock, the planting of trees, and the quantification of survival rates. The characterization of the stock by stand area per age class should be replaced by the tree number per age class. The planting or natural regeneration of numerous trees in the forest should be replaced by the planting of individuals of several years. The survival rates need to be adapted as competition and removal play a minor role in urban tree stocks compared with forests.
This study aims at transferring the concept of the "Normal Forest" and of sustainability from forest stands to urban tree stocks. We operationalise this transfer by a simple generic model. We present a first model that still is far from completion. It does not yet distinguish between urban forests, parks and street trees, different planting patterns and spatial arrangements of trees (solitary growth, groups, rows, clusters), and it includes only a few selected ecosystem services. It is also not yet parametrized species-specific and needs much further improvement. However, the model will show how to transfer the concept of sustainability of regulating and provisional services from forest to urban tree stocks. Therefore, the main objectives are to (i) derive estimation functions for growth, mortality and replanting, and to integrate them into an age-class based model for simulating the long-term development of urban-tree stocks, (ii) apply the model for assessing the state and sustainability potential of the tree number and ecosystem functions of a simulated stock of urban trees, and (iii) to demonstrate the model's applicability for indication and management of long-term sustainability of the tree numbers. This is realized by calculating a target state of the stock and the selected example ecosystem services and functions from a given initial tree class distribution.
The presented scenario simulations may contribute to analyse any non-sustainability and to plan and regulate an urban tree stock in a sustainable way. We discuss the provisional nature of the model, the potential and the necessary steps required for its further development, and its feedback to data acquisition about urban tree stocks and their practical management.
Material and methods
Matrix model structure
The methodological basis is a three-dimensional matrix containing the development of tree numbers over time (first dimension), the total tree numbers per one-year age class (second dimension), and the respective tree numbers per species (third dimension). Thus, the tree number at a given point in time, i, for a given age, j, and a given species, k, is characterized by \(n_{i,j,k}\) with i being the time steps of stock development (i, i = 1…1000 years of scenario run), j being the one-year age class (j, j = 1…100), and k the tree species. The tree number presents the total tree numbers per city, quarter or any other defined area. For visualization or planning, the results can be summarized in age classes of 10 years (0–11, 11–20, 91–100) or 20 years (0–20, 21–40, … 81–100).
Initial and target age class distribution
The initial number of trees per age class can be read in by the model and should be provided separately for each species. For calculating the tree numbers and ecosystem services per hectare (or per 100 ha) the model requires the area of the city, quarter or park related to the tree stock. As a basis for the initial age class distribution and related area, ad hoc inventory data, available tree registry data from urban administrations, or generated test data for scenario analyses may be used. Figure 1a–d, shows examples for various generated initial age class distributions. In contrast to the idealized uniform distribution (Fig. 1a) the target distribution (Fig. 1b) considers an increasing mortality of trees.
The target age-class distribution can be derived from the species-specific total number of trees of the stock and the species-specific maximum retention time under urban conditions agemax and the survival function
that quantifies the tree survival dependent on the relative tree age.
The total number of trees results from the available or newly created planting places for trees and is finally a management decision; it strongly determines the provision with green infrastructures and their ecosystem services.
The species-specific survival function (Eq. 1) can be derived from tree registries, literature, or experience. The ratio \(age/{age}_{\mathrm{max}}\) is called \({age}_{rel}\) in the following and ranges between \({age}_{rel}=1\dots 1.0\).
Exponent \({\alpha }_{mort}\) may be derived from plotting the relative number of dead trees over relative age and fitting the relationship
which turns out as double-logarithmic allometric relationship
For the relation between mortality and survival applies \(surv=1-mort\); thus for the survival function results Eq. 1.
For deriving the target age class distribution according to this survival function, we first need the integral of the latter function from 0 to 1
As for \(1-1/({\alpha }_{mort}+1)\) applies \(surv={1-(age/{age}_{\mathrm{max}})}^{{\alpha }_{mort}}\) for a number of target trees \({n}_{targ}\) the distribution is
Based on the integral of this function the target tree numbers for each age interval \({age}_{rel}\)(e.g., from t = 1…10, 11–20, …99–100) can be calculated as by
The target tree number in the first 10-years-class is
The target tree number in the second 10-years-class is
These calculations yield the absolute target age class distribution \({\Phi }_{targ}\) for target tree number based on \({n}_{targ}\) and the mortality parameter \({\alpha }_{mort}\) as shown exemplarily by the decreasing black line in Fig. 1. Latter target 10-years-age class distribution may serve as a reference for quantifying the absolute deviation/distance between the real and target tree numbers.
Replanting routine
The replanting options are as follows: A first option is to annually plant a fixed number \({n}_{renew}\) of trees of a given age and to provide them in a vector that is read in by the model. A second option is to exactly replant the failed and removed trees, estimated by the mortality and survival function, respectively. A third option is to plant exactly the number of trees that is required for achieving and keeping the target age-class distribution. For this purpose, the number of required trees can be estimated by the total target tree number and the required entries, e.g. the number of entries by planting into the first 10-year age class. The respective tree number \({n}_{renew, targ}\) can be estimated based on Eq. 7.
Basic relationships and auxiliary link functions
Based on the initial age class distribution \({\Phi }_{inital}\) and the vector \({n}_{renew}\) with the number of annually replanted trees, the model shifts the tree numbers forward by one-age class every year. Based on a species-specific diameter growth function (Table 1), and depending on tree age \(d={a}_{1}\times age\), the stem diameter can be updated after each annual time step. The assumed proportional relationship between tree age and stem diameter is just a first general assumption and may be easily replaced by more sophisticated or updated relationships, e.g., by Bruce and Schumacher (1950, p 380), Zeide (1993), or Pretzsch (2020).
The survival function \(surv={1-(age/{age}_{\mathrm{max}})}^{{\alpha }_{mort}}\) introduced in the previous section provides the number of surviving trees and can be used for quantifying the number of dropout trees as shown in Sect. "Initial and target age class distribution". The dropout trees can be replaced in the next age step by replanting young trees at their growing places.
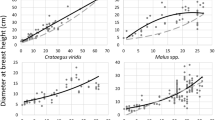
For the remaining trees, a set of auxiliary link functions (Table 1) estimates various functional and structural tree attributes, such as tree height, crown area, crown volume, leaf area or cooling effect based on the current tree diameter or age of the trees in each age class. Table 1 represents default values as a first approach of a set of link functions, which are certainly extendable. In Fig. 2 the default relationships (curves in the middle) as well as curves on higher and lower levels used in some scenarios later on are visualized. Many more ecosystem services may be estimated depending on the tree size or age.

Auxiliary relationship for the derivation of tree structure and functions from tree (see Table 1). For the model calculations, we used generic dependencies on age for the following variables (a) stem diameter d 1.3 at a tree height of 1.3 m, (b) rel. number of surviving trees, (c) total tree biomass, (d) crown volume, (e) one-sided leaf area, (e), and (f) cooling effect. The respective broken lines in the middle are based on the parameters given in Table 1 and represent the default relationships
The relationships between stem diameter, d1.3, at the stem height of 1.3 and tree age are derived from Moser et al. (2015), Moser-Reischl et al. (2019), and Pretzsch et al. (2017). As stem diameter develops rather linearly over age (Assmann and Franz 1965; Pretzsch 2001, p. 111), we apply linear functions to keep it simple.
Tree height, height to crown base, crown projection area and crown volume are estimated by allometric functions depending on stem diameter as shown in Table 1. The respective general functions are derived from studies of trees in forests, urban areas, and parks (Pretzsch et al. 2015, 2019).
The decreasing survival of trees with increasing age is modelled by Eq. 1 with \(\alpha_{mort}\) ranging between 3 and 5 for short to long-living tree species, respectively, following Nowak et al. (2004), Moser et al. (2018a, b) and Rötzer et al., (2019). For estimating biomass production, we apply the general species-overarching functions for above and below-ground biomass by Forrester et al. (2017, Fig. 5 and Supplementary Material). The combination of the functions for above and below-ground biomass allows the estimation of the total biomass. To estimate tree volume, the total biomass is multiplied by 2.0; for estimating carbon content the biomass was multiplied by 0.5 (Knigge and Schulz 1966). For the present model prototype, we use the abovementioned species-overarching biomass functions and mean expansion factors for the calculation of tree volume and carbon content. Further developed model versions may use species-specific biomass functions by Forrester et al. (2017) and conversion factors introduced among others by Pretzsch (2009, p. 66–71).
We further apply the general function of estimating one-sided leaf area by Forrester et al. (2017), which is related e.g. to the filtering of fine particulates, air moistening, shading, and insulation. In all cases, we use simple general functions to show the magnitude of size dependency of the functions and services of trees. Further developed model versions may estimate species-specific leaf areas depending on tree size, competitive status, and environmental conditions (Moser-Reischl et al. 2021).
For the cooling effect through transpiration of trees depending on their age, we use a function based on Rötzer et al. (2019, 2020a; see equation in the last row of Table 1). The equation is based on studies of tree species in German cities and calculations using the growth model CityTree (Rötzer et al. 2019). In contrast to most other urban tree growth models, the CityTree model simulates growth and ecosystem services in a process-oriented manner, i.e. depending on the environmental conditions (Rötzer et al. 2020b). Ecosystem services such as transpiration are calculated for individual trees depending on age and tree species on the basis of average monthly climate conditions for urban regions. The CityTree model simulates cooling by transpiration from the species-specific transpiration sum. This is calculated according to the Penman equation within the water balance module of the CityTree model. Then the transpiration sum is multiplied with the temperature-dependent energy that is needed for the transition of water from the liquid to the gaseous phase (Rötzer et al. 2019). Within this study, we use the simulated cooling mean values of lime trees (Tilia cordata Mill.) of six German cities and derive a function that we use for the estimation of a tree’s cooling effect (kWh per year). In this way, the cooling effect is estimated in dependence on the respective ages of the trees as reflected by the equation in the last row of Table 1.
In further developed urban tree growth models functions for pollution deposition as developed by Nowak (1994) or for pollution uptake as provided by Emberson et al. (2000) may be included.
Indicators of sustainable tree stock and ecosystem functions
In this section, we introduce the six indicators \(Itotal\), \(Idev\),\(Istab\), \(Innew\), \(Indfh\), and \(Inold\) characterizing the sustainability and normality of the tree number distribution of a stock of urban trees. They may be used for assessment and planning of sustainability by scenario analysis (see Sect. “Indication and prediction of age class distributions”).
The absolute tree number \(Itotal\) per defined area (city, quarter, park) is essential for characterizing the urban greening. \(Itotal\) is the total number of trees summarized over all age classes for given points in time t
Indicator \({Idev}_{t}\) quantifies the deviation between the target number of trees and the current observed tree numbers per age classes in relation to the total number or trees. For the derivation of \({Idev}_{t}\) we need the target steady-state age class distribution \({\Phi }_{targ}\) developed in Sect. “Indication and prediction of age class distributions”. Based on the observed tree numbers per age class, ni, and the target tree numbers \({n}_{targ, i}\) per age class I at time point t, \({Idev}_{t}\) quantifies the deviation between both in relation to the total number of observed trees
Large values of \({Idev}_{t}\) mean high deviations from the expected age class distribution; \({Idev}_{t}\) =0 indicates a perfect match of the observed and the expected distribution of the number of trees per age class.
The stability \({Istab}_{t}\) of the tree number in a city or unit area and related ecosystem service provision over a period t = 1 …k can be quantified based on the records of the annual tree numbers \({Itotal}_{t,t=1\dots k}\) as follows
\(Istab\) is the inverse of the coefficient of variation of the annual tree number in the period of the next k years. Here we used a period of k = 100 years for quantifying the stability of the tree number in a city. In Eq. 11 the abbreviation std represents the standard deviation and mean represents the mean value. Both are calculated for the total tree number Itotal in the periods t = 1 … k. High values of \(Istab\) indicate high stability of tree numbers; \({Istab}_{t}=1\) indicates a constant number of trees in period t = 1 … k.
We further introduce \({Innew}_{t}\) that indicates the number of the trees in the first 10 age classes (age = 1…10) in relation to the expected number of trees in these age classes under steady-state conditions. The observed stock of tree numbers is calculated as \({n}_{obs, age<{age}_{max\times 0.1}}={\sum }_{i=1}^{{age}_{\mathrm{max}\times 0.1}}{n}_{i}\). The target number of trees younger than \({age}_{max\times 0.1}\) is according to Sect. “Initial and target age class distribution”.
\(n_{{targ, age < age_{max \times 0.1} }} = \mathop \smallint \limits_{0}^{0.1} 1 - \left( {age_{rel} } \right)^{{\alpha_{mort} }} dage_{rel} /(1 - 1/\alpha_{mort + 1} ) \times n_{targ} .\) The indicator results as
For integration of \({\int }_{{age}_{rel}=l}^{u}{1-({age}_{rel})}^{{\alpha }_{mort}}d{age}_{rel}\) with lower and upper limit l and u, respectively, see Sect. “Initial and target age class distribution”.
\({Indfh}_{t}\) indicates the ratio between the observed stock of tree in the first half of the age class distribution, i. e. number of trees younger than agemax/2, in relation to the respective target tree numbers younger than agemax/2. \({Indfh}_{t}>1\) indicates an overstock of young trees (e.g., Fig. 1c), \({Indfh}_{t}=1\) means a perfect match of observed and target tree numbers (e.g., Fig. 1b) and \({Indfh}_{t}<1\) indicates a deficit of trees younger than agemax/2 (e.g., Fig. 1d). For this purpose, the observed stock of tree numbers is calculated as \({n}_{obs, age<{age}_{max/2}}={\sum }_{i=1}^{{age}_{\mathrm{max}/2}}{n}_{i}\). The target number of trees younger than \({age}_{max/2}\) is according to Sect. “Initial and target age class distribution”: \(n_{{targ, age < age_{max/2} }} = \mathop \smallint \limits_{0}^{0.5} 1 - \left( {age_{rel} } \right)^{{\alpha_{mort} }} dage_{rel} /(1 -1/\alpha_{mort+1})\times n_{targ} .\) The Indicator results as
For integration of \({\int }_{{age}_{rel}=l}^{u}{1-({age}_{rel})}^{{\alpha }_{mort}}d{age}_{rel}\) with lower and upper limit l and u, respectively, see Sect. “Initial and target age class distribution”.
Old trees are of high relevance for many ecosystem functions. Thus the indicator \({Inold}_{t}\) quantifies the balance between the observed and the target number of trees older than \({age}_{max\times 0.9}\).
The observed stock of tree numbers is calculated as \({n}_{obs, age<{age}_{max\times 0.9}}={n}_{10}\). The target number of trees older than \({age}_{max\times 0.9}\) is according to Sect. “Initial and target age class distribution”:
\(n_{{targ, age < age_{max \times 0.9} }} = \mathop \smallint \limits_{0.9}^{1} 1 - \left( {age_{rel} } \right)^{{\alpha_{mort} }} dage_{rel} /\left( {1 - 1/\alpha_{mort + 1} } \right) \times n_{targ}\). The Indicator \(Inold_{t}\) results as
For integration of \({\int }_{{age}_{rel}=l}^{u}{1-({age}_{rel})}^{{\alpha }_{mort}}d{age}_{rel}\) with lower and upper limit l and u, respectively, see Sect. “Initial and target age class distribution”.
Results
Indication and prediction of age class distributions
We start the model with three different age-class distributions (see upper column of Fig. 3, t = 0), which denotes a deficit of 20% of trees compared with the target tree number and specific deviations from the target age-class distribution (solid black line in Fig. 3). The model runs show the different long-term convergence to a target steady-state (Fig. 3 from above to below). As the annual replacement rate, we assume the replanting of the first age class with the tree numbers according to the long-term steady-state. The respective tree numbers \({n}_{renew, targ}\) can be estimated based on Eq. 7. In this way, the stock of urban trees is filled up continuously until the overall target tree number is achieved. On the long term, this approach leads to a balanced age-class distribution.

Long-term development of urban tree stocks starting with three different initial age class distributions (a–c) scenario 1: understocking by about 20% in all age classes, scenario 2: understock of old trees, scenario 3: understock of young trees. For each of the three scenarios the real (columns) and target (black line) age class distributions are displayed for time (t = 0, 25, 50, 75, and 100). Tree numbers below and above the target distribution indicate deviations from a sustainable target stock
The first scenario already starts with a relatively balanced age-class distribution. In the second scenario we simulate an overstock of young trees (middle column in Fig. 3) while in the third scenario, we simulate an understock (right column). Such imbalanced age-class distribution may be caused by temporarily too high or low annual replanting rates in the past. The scenarios show that it takes several decades to remedy the deviations for a target distribution, especially in case of temporarily imbalanced replanting in the past. The target distribution (black line) results from the total number of trees and planting places, the species-specific survival probabilities and the development of the trees through the age classes.
Figure 4 applies the set of six indicators Itotal, Idev, Istab, Innew, Indfh, and Inold for the scenarios 1–3 shown in Fig. 3. By continuous annual replanting of the target state tree number ntarg in the first age class, all three scenarios arrive in a steady state, after a whole rotation cycle of 100 years. However, the speed of approach to the steady state and the temporal deviations between initial and present state differ considerably.

Assessment of the age class distributions of scenarios 1–3 (see Fig. 3) by a set of sustainability indicators (a–f) derived in Sect. Indicators of sustainable tree stock and ecosystem functions and commented in the text. The thin horizontal line represents the target age class distribution (see Fig. 3). The three lines indicate the development of the stock of trees from years t = 1….100 assuming different initial age class distributions and a continuous replanting according to the target stock
Itotal reflects the development of the current total tree number. In Fig. 4a it is compared with the target total tree number (horizontal line, ntarg = 1000 per 100 ha−1 in this model example).
Idev (Fig. 4b) indicates the absolute deviation between the current tree number and the target tree number distribution.
Istab (Fig. 4c) quantifies the stability of the real tree number distribution over time; Istab is 1- coefficient of variation of the tree number in the last 1000 years. \(Istab=1\) indicates a steady state tree number distribution.
Innew (Fig. 4e) quantifies the number of trees in the first 10-years age class (age 1–10) in relation to the target number of tree in this age class under target steady-state conditions.
Indfh (Fig. 4d) indicates the stock of younger trees, agemax/2 in relation to the respective target tree numbers in the first half of the age class distribution. Indfh > 1 indicates an overstock of young trees.
Inold (Fig. 4f) indicates any over- or understock of older trees in age class 91–100 years analogously to Innew.
Scenario 1 (Fig. 4, continuous line) starts with a rather balanced tree number distribution over the age classes but with a 20% deficit of tree number compared with the target tree number. Itotal of this scenario continuously approaches the target tree number. The absolute deviation of tree number over all age classes, Idev, is the lowest and the stability of the age class distribution is high. It starts just 20% lower than the target value. However, apart from that, it is rather balanced regarding the representation of trees of different ages. Innew, Indfh and Indold show that the slight overstock of young and the understock of old trees is remedied quite quickly by annual planting. In the beginning, the constant annual planting rate causes a development above the target tree number, later a convergence to the steady state (horizontal 1.0-line) is obvious.
In the case of scenario 2 (Fig. 4, broken line) Itotal starts with the same 20% deficit of total tree numbers. In this case, the age-class distribution is less balanced and the absolute deviation from the target Idev is higher from the beginning onwards. It takes much longer to compensate for the overstock of young trees at the beginning. Innew, Indfh and Inold show that the overstock of young and understock of old trees at the beginning cannot be remedied quickly but causes a long-term imbalance that lasts for a whole rotation. The constant replanting rate even increases the age class imbalance, since the replanted add up to the per se overstock of the young trees at the beginning of the scenario. The imbalance between current and target tree numbers cannot be remedied before the end of the rotation.
Scenario 3 (Fig. 4, dotted line) starts with a deficit of young trees at the beginning. Here it takes the longest time to achieve a balanced age class target distribution. Innew, Indfh and Inold oscillate around the target line for several decades. The approach of Itotal, Idev and Istab to the target line is the slowest of all three scenarios, as the imbalance was the highest at the beginning and compensating the tree number deficits at the lower age classes takes the longest time.
From age class distribution of tree numbers to the provision of ecosystem services
In this section, we analyse the target age class distribution of tree numbers (Fig. 3, m–o) for various functions and services of the tree stock per age class and in total. The progressive decrease of tree numbers with age because of mortality and the linear increase of stem diameter with age result in characteristic age class distributions of biomass, crown characteristics and cooling effects as shown in Fig. 5 and Table 2. Table 2 summarizes for all age classes of the given urban tree stock the absolute characteristics and their relative distribution.

Target age class distribution of an urban tree stock in terms of (a) tree numbers and the resulting age class distributions of (b) the total tree biomass, (c) crown projection area, (d) crown volume, (e) leaf area, and (f) cooling effect per year and hectare (see Table 2 for absolute values of the performances per hectare)
For the tree biomass stock, the 10-years age classes 61–70 to 81–90 are most relevant as they still represent a considerable number of trees and the trees are already large in size. For other three-dimensional characteristics such as crown volume, the age class distribution is similar to the distribution of the biomass, also, with a peak in the tree ages between 61 and 90. For the 2D characteristics such as crown projection area or leaf area, the peak of the distribution is located slightly left of this, here the contribution of trees of ages of 50–80 are most relevant. This is due to the fact that the tree measures such as \(cpa\) and \(la\) are still lower than in advanced age, whereas the tree numbers in these age classes are yet higher. So the tree number counterbalances the size effect and results in higher total crown sizes and leaf areas per hectare. The absolute and relative distribution of structural and functional characteristics over the age classes (Table 2) indicates the high importance of old and big trees. The first five 10-years age classes (age 1–50) accumulate 64% of the trees, compared to only 36% in the second half of the age class distribution. However, traced to the biomass (20:80) the contribution of young and old trees is the opposite.
For the cooling effect, the 60–90 years old trees are also most relevant, while the smaller trees play hardly any role; except presenting the potential and investment for the future cooling effects. Traced to the cooling (28:72) the relationships between the contribution of young and old trees are opposite to the tree number. For the ecosystem service provisions, protection of old trees thus plays a key role: they contribute significantly to carbon balance by their high biomass, to habitat by their large crowns and to cooling by their high shading and transpiration via their crown projection area and leaf area, respectively. The absolute values in Table 2 result from the model calculations and may be useful for predicting the long-term consequences of different management options of urban greening.
In another scenario analysis, we exemplarily explore how a combination of tree species may modify the ecosystem services and functions despite a limited number of planting places with sufficient growing space. Here we assume a potential number of 10 trees per hectare on the long term on an average (limited planting places and growing space in urban areas).
For tree species 1, we assume a 50% higher diameter growth rate (\({a}_{1}=0.75\)) but a lower survival.
rate (\({\upalpha }_{{m{\text{ort}}}} = 3\)); for species 2, we assumed the same setting as for scenario 1–3 (\({a}_{1}=0.50, { \alpha }_{mort}=5)\). Species 1 may represent faster growing species such as horse chestnut or poplar species, whereas species 2 may be oak or lime tree. However, in this development state the model is still generic to introduce the model idea and concept; species-specific growth trajectories will be integrated into further developed versions. We start the simulation with the same initial tree number per hectare and the same annual replanting rate as in scenario 1–3. However, in the following scenario we assume an equal share of 50:50 of both tree species in both the initial distribution and replanting rate.
Figure 6 shows the steady state after 100 years of the simulation run. Due to the higher mortality of species 1, this species decreases quicker in tree number (Fig. 6a). However, its faster growth results in a much higher provision of total biomass, cpa, cv, and la (Fig. 6b–e). Noteworthy is the 20% faster approach to the higher level, as this scenario is based on a higher growth rate but a lower survival rate of species 1 (see previous paragraph). Certainly, the younger stands are always underrepresented in their contribution due to the small size of the trees. But this scenario shows the potential of species combinations for arriving at a higher, more balanced stock, and also for arriving it faster than within a single-species stock. Because of the fast growth and biomass accumulation of species 1 also the cooling effect increases slightly compared to mono-specific scenario shown in Fig. 5.

By combining fast and slow-growing tree species (species 1 and 2, respectively) ecosystem services and functions may be increased even when given the same target number of 10 trees per hectare as in scenarios 1–3 (compare Figs. 3 and 4). (a) tree numbers of species 1 and 2 and the corresponding age class distributions of (b) the total tree biomass, (c) crown projection area, (d) crown volume, (e) leaf area, and (f) cooling effect per year for the target age class distribution shown in Fig. 5a
Management of sustainable urban tree stocks
In this section, we apply the model for getting some insights into the long-term effects of different management options. We fix a target stock of 10 trees per hectare which is for the sake of simplicity, a mono-specific stock (Fig. 4) and start with the same initial age class distributions as in scenarios 1–3 (Fig. 3a–c).
First, we analyse two different replanting options: annual replanting on all growing places where trees were dropped out by mortality versus annual replanting of a constant number of target trees according to the aimed steady-state conditions. Due to the often very limited planting places and growing space in urban areas, planting sites that become available again after the removal of dead trees are usually immediately used for new plantings. Supposing that the initial tree stock is not at the target stage, e.g., there are less trees as planned, an overstock of young trees or old trees and empty places are used for replanting immediately. Therefore, it will take a very long time to reach the target stock (Fig. 7a). In years with many dropouts due to overstocked age classes there will be much replanting, and in years with low drop out it will be vice versa. By this replanting mode, any deviation from the target distribution will be maintained over decades and centuries. Figure 7a shows for three different initial age class distributions, how the immediate and complete replacement causes a long-term oscillation of the biomass per hectare. This will need a long time (> 200 years) to reach a steady state. On the long term, the oscillation gets damped by the age-related increase of tree mortality.

Development of total biomass per hectare assuming different options of initial age class distributions and different replanting modes. (a) scenarios 1–3 initial age class distributions as shown in Fig. 1, b–d and annual replanting on all growing places where trees were dropped out by mortality and (b) scenarios 4–6 initial age class distributions as shown in Fig. 1, b-d and annual replanting of a constant number of target trees according to the aimed steady-state conditions shown in Fig. 1b
Figure 7b shows the results of the second scenario. By replanting a defined constant number of trees according to the target distribution results much earlier in a steady-state of biomass provision. A replanting of the target tree number in age class 1 results in a steady state after 100 years in all cases of initial age class distributions. However, this requires the calculation of the target replanting rate and that some planting space may remain unplanted at least temporally. The same differences between annual replanting on all growing places versus annual replanting of a constant number of target trees would apply analogously for the other ecosystem services.
Second, we analyse the effect of mono-specific (a–c) versus mixed-species (d–f) set-up on selected ecosystem services (Fig. 8). As starting values, we choose again the three different tree age class distributions as shown in Fig. 1, b–d. The target distribution is the steady state represented by the line in the same Figure. We assume an annual replanting rate according to the target tree number in the first age class.

Development of (a and d) total biomass, (b and e) leaf area, and (c and f) cooling effect per hectare assuming different options of initial age class distributions and mono- (upper row) versus mixed-species set up (lower row). (a–c) scenarios 10–12 initial age class distributions as shown in Fig. 1, b–d, annual replanting of a constant number of target trees according to the aimed steady-state conditions, and replanting by a species with medium growth velocity and mortality rate. (d–f) scenarios 13–15 initial age class distributions as shown in Fig. 1, b–d, annual replanting of a constant number of target trees according to the aimed steady-state conditions, and replanting by a 50:50 combination of species 1 with high growth velocity and mortality rate and species 2 with medium growth velocity and growth rate
In the scenarios 10–12 we assume a mono-specific (Fig. 8, a–c) set up with a species of medium growth velocity and mortality rate (default values in Table 2). In the scenarios 13–14 we simulate a 50:50 of the same species combination as shown in Fig. 6. For tree species 1, we assume a 50% higher diameter growth rate (\({a}_{1}=0.75\)) and a lower survival (\({\alpha }_{mort}=5\)). For species 2 we assume the default setting as shown in Table 2 (\({a}_{1}=0.50, { \alpha }_{mort}=4)\).
Figure 8 shows that tree species combination can considerably increase the ecosystem service provision although the tree numbers are the same. The new steady state is achieved in the shortest span of time in case of a rather balanced initial age class distribution (scenarios 10 and 13). Initial deviations from the target distribution need long to be remedied and balanced by replanting. All considered output values arrive at a much higher level in case of the species combination (Fig. 8d–f), compared to the mono-specific set up (Fig. 8a–c).
Discussion
Adaptation of the "Normal Forest" concept for sustainability management of urban tree stocks
The idea and the goal of sustainability, as developed in forestry is to manage a forest in a way that it guarantees a supply of goods and services continuously in a given environment without depletion of resources here or elsewhere (von Carlowitz 1713). To manage forests in such a balanced way, forest science developed the "Normal Forest" and "Target Forest" model for balancing the age classes. Yield tables were established for balancing the growth and removal stand, while silvicultural guidelines were developed for the establishment, density reduction, final harvest and natural regeneration, to practically regulate the stands according to an overall sustainability concept.
Applied to urban trees, sustainable management should guarantee a continuous stock of trees for the provision of ecosystem services such as carbon storage, cooling, shading, and filtering of fine particulates. Whereas in forests a sustainable wood supply may be achieved by stand areas distributed over the age classes according to the "Normal Forest" or "Target Forest", a sustainable supply of ecosystem services in cities may be achieved by a steady state of tree numbers per age class. This requires that the drop out of trees should be continuously compensated by replacement. A normal urban tree stock model may be used for planning planting provisions, scenario analyses to provide the technical know-how to maintain a given stock in a steady state or to systematically build up a higher stock of urban trees. Speidel (1972) proposed indicators of sustainable wood growth and yield which can be used for the "Normal Forest" model by Hundeshagen (1826, 1828) or "Target Forest" by Hanewinkel et al. (2011). Analogously, indicators may be used for assessing, establishment and management of sustainability of ecosystem services of urban tree stocks. The mentioned differences between the systems dynamics and expected ecosystem services of stocks of urban trees and forest were considered when transferring the sustainability concepts and model approaches from forest stands to stocks of urban trees.
The potential of the model for indication and management of sustainability
The introduced indicators are calculated annually for the current state and the future. The reference for the indication is a target stock of urban trees and a target age class distribution derived by the survival probability of the tree species. The indicators reflect both deviation of the current urban tree stock from the target stock and the future development, assuming different planning options. Thus, the model and the indicators support the assessment and management of the sustainability of a stock of urban trees, analogous to the concepts of the "Normal Forest" and "Target Forest" and the respective indicators for maintaining sustainability.
The comparison between the provision of tree numbers of different ages and ecosystem services underlines how much tree age and especially tree size matters. Despite the increasing dropout and the lowering tree numbers with progressing age, old trees are most relevant for all considered structures, functions, and related ecosystem services (McPherson et al. 2013; Rötzer 2021; Rötzer et al. 2020a). Many studies have demonstrated that large old trees can provide up to 10 times more ecosystem services in comparison to young trees. This applies e.g. for carbon storage (Rötzer 2021; Rötzer et al. 2020a) and also for shading and pollution removal that both strongly depend on leaf area and crown size (Hofman et al. 2016; Rahman et al. 2019; Simon et al. 2018). Tree crown size does not linearly increase with tree age (such as assumed for diameter) (Pretzsch et al. 2015; Rötzer et al. 2020b) and thus the relationship between age and some services may probably be characterized by saturation.
Certainly, hardly any urban planner will be interested explicitly in biomass provision. However, the development of biomass is worth mentioning as it is closely linked to the provision of many ecosystem services. For a sustainable provision of ecosystem services such as habitat provision, cooling, shading, air moistening, or filtering of fine particulates in an urban environment, the leaf area, crown size and biomass of the stock of trees are very important characteristics. The sparse tree density in urban areas means that their contribution to carbon sequestration and storage is less relevant compared to forests. However, the environment policy of many cities aims at a constant or even neutral carbon balance, to which the tree stock, and especially the tall trees may contribute (Chen 2015; Nowak 2002; Russo et al. 2015). A permanent stock of trees and crown space is relevant for keeping a constant provision of habitats and biodiversity in urban areas, especially a sufficient and constant number of tall and old trees (Stagoll et al. 2012). As inevitably, old trees will need to be removed one day, strategies for regeneration of the stock of urban trees are sought that will allow to maintain or even increase the level of provision of ecosystem services.
Our results indicate that securing a generation overlap may be better than a replanting after dropout of old trees. By a generation overlap, the long time span for replacement of tall trees may be shortened by a next generation of tall ones, similarly as it is in close-to-nature forestry in contrast to the age class system. To pursue such a targeted tree planting strategy requires information on the age class distribution of the stock of trees which may not be available for urban areas and especially for trees planted in public spaces (McPherson et al. 2017, Strunk et al. 2016; Tanhuanpää et al. 2014).
Certainly, an increase in the tree number would be desirable; however, due to other infrastructures, planting places and growing space of trees are often strongly limited or even continuously reduced in urban areas (Jim 2004; Moser-Reischl et al. (2021); Sjöman et al. 2012). The scenarios show how a given space may be used more efficiently in terms of ecosystem services and functions by species selection and species combination. Even with a given restricted target tree distribution, the ecosystem services can be increased by selection and combination of fast and slow-growing tree species (scenarios 13–15). These findings are of particular relevance for urban forest management. Urban areas are often very rich in tree species, but usually only have a limited number of genera and species. (Pauleit et al. 2002, Sæbø et al. 2005, Raupp et al. 2006, Sjöman et al. 2012). Innovative planning options may be included in the model in order to explore their long-term consequences before implementation. The model may also contribute to reveal trade-offs between benefits of the tree stock for human health and welfare as well as disservices such as allergies, danger of accidents with cars or hazards by stem breakage (Bodnaruk et al. 2017). Of special interest are the trade-offs between beneficial and detrimental effects of given tree stock of given species, ages, or sizes.
Insights from the presented model applications
The target age class distribution of trees is an essential basis for all subsequent planning steps. It results from the number of available planting places for urban trees and the species-specific tree mortality. So far, mortality rates are often unknown, unconsidered, and neglected. A review of US literature revealed mortality rates ranging between 0 and 30% from repeated surveys of uneven-aged stands of trees (Hilbert et al. 2019), while a meta-analysis established annual survival rates for street trees of above 90% with a half-life of street tree populations of 13–20 years (Roman and Scatena 2011). It is a typical effect of the establishment of model approaches that they point to so far unknown, undocumented or neglected information. If both, the target distribution and the underlying mortality/survival function are available or estimated they enable the calculation of the necessary annual number of replanting (see \({n}_{renew}\) in Sect. “Replanting routine”) for the achievement and the maintenance of the target distribution.
The scenario analyses show the strong contribution of old trees for all ecosystem service provisions. Further, also the relevance of a continuous replanting for the maintenance of a given stock is demonstrated as well as the relevance to avoid a too strong oscillation by imbalanced age class distribution and stop-and-go replanting. Stop-and-go replanting would generate blocks of even-aged trees that will need replacing after the same number of years which would result in blocks losing all trees and their services simultaneously. This may be avoided by, e.g., a continuous replanting or by combining complementary tree species with different growth velocities (Xiao and McPherson, 2016).
The assumed steady-state target distribution of 10 trees ha−1 illustrated in Fig. 5a means an accumulation of trees in the low age classes and low numbers in the advanced age. However, crown projection area and leaf area increase about quadratically with tree diameter and crown volume, and biomass increase about cubically with tree diameter. Regarding crown volume and biomass, the age-related decrease in tree numbers is overcompensated by the age-related increase of tree size. The total biomass stock amounts to about 3 t ha−1 with an accumulation of about 80% in the trees over 50 years (Table 2). Table 2 shows a similar accumulation in the advanced age classes for the cpa, cv, la and cooling provision, e.g., 72% of the cooling effect per hectare is provided by the trees over 50 years of age while their tree number is only 36%. This underlines again the importance of big and old trees for the sustainability of ecosystem service provisions.
Deficiencies and further development of the model
For this first model version, we use tree age as an independent variable for modelling tree size growth. One reason for this was that for many urban areas the year of tree planting and thus the tree ages are known. Another reason was that we considered mainly open growing trees. In contrast to densely growing and competing forest trees, open-grown urban trees show rather strong size-age correlations as their size growth is less slowed down by competing neighbours (Caicoya and Pretzsch 2020; Pretzsch et al. 2015). The mortality of urban trees is mainly driven by stress, damages, or aging (Berger et al. 2004; Hilbert et al. 2019), whereas in forest stands it is mainly determined by inter-individual competition (Zhang et al. 2015). Although often solitarily growing, the growth of urban trees may be slowed down by resource limitation caused by obstructing buildings, soil sealing, or damages (e.g. Sieghardt et al. 2005). As soon as future studies provide the necessary data the present models for tree growth and mortality may be complemented by variables representing site conditions, competition, and biotic and abiotic disturbances.
Whereas in forestry the focus is on wood supply, urban trees are expected to provide a broad set of ecosystem services mainly depending on species and size (Jim and Chen 2009; Rahman et al. 2015; Rötzer et al. 2019; Samson et al. 2017). Thus, further impacts on ecosystem services and disservices of trees which are based on the spatial distribution of the trees within a site (e.g. single tree plantings vs. clustered ones) and/or environmental conditions such as drought periods or heat waves are not yet included in the current model version. This should be possible in a future spatially explicit version of the model, which can also take changed environmental conditions into account. Thus, the next steps for further improvement of the model will be the multi-species parametrization (e.g. for tree size, biomass, leaf area), the improvement of the included processes (e.g. mortality) and the modelling of tree growth depending on the local environmental conditions (e.g. stocking density, competition, facilitation, sealing). This study exercises one aspect (cooling) of one ecosystem service (temperature mitigation) as an example. In the next steps, we will include additional ecosystem services (e.g. habitat provision, air purification) and their related aspects.
Adding further species into the model would give further insights about the role of tree species diversity to create an urban forest that can steadily provide ecosystem services while being resilient to adverse effects of climate change as well as pests and diseases. The further development of this model will aim at a user-friendly open-source model version that will be flexible to include further aspects of the urban tree structure, functions, ecosystem services, and management such as tree architecture, tree stability, risk potential, planting and maintenance costs.
Feedback from the model to data acquisition, management and research
The model approach and indicators and their further development may trigger the organization of available inventory data as discussed by Brack (2006). But further steps will also require additional inventories to establish an overview of the urban tree stock, the development of a target age class distribution, and the planning of future annual tree planting numbers and costs. The latter may contribute to achieve and maintain a sustainable tree stock.
The introduction of planning tools can have strong feedbacks on data acquisition, evaluation and may trigger the transition to quantitative guidelines and knowledge-based planning. So far, scattered and non-organized tree registers and inventory data from urban tree stock may be compiled and made accessible for model application. The data organization enables the parameterization of species- and site-specific driver and link functions. The potential to use and exchange data may support a standardization as it was triggered in forestry by model establishment (Pretzsch et al. 2002, 2008).
For the sake of simplicity, we assume rather basic driver functions for diameter growth, survival and also very general and simple link functions for the estimation of ecosystem services based on dendrometric attributes of the trees within the considered age classes. All those functions can be improved and adapted to local settings by utilizing data from urban tree research projects. We apply 1-year-old plants for reestablishment. The model allows also to start with older plants or to add big pot trees temporarily to the age class distribution and corresponding estimations of the ecosystem services of a species.
Model application may promote the systematic analysis of a present stock of trees, the development of target stocks, their control and the adjustment of the present state to a target stock and steady state. Management guidelines may become quantitative and less plant-on-occasion motivated. Models may contribute to a better use of existing data on the stock, the growth, mortality, replacement rates of trees and the knowledge about their ecosystem services. Model building causes integration and revelation of knowledge gaps for understanding and systematic sustainability planning of the stock of urban trees. Such an overall planning e.g. at the city level may assure a sustainable provision with services but also a basis for planning the provision of planting material, manpower, and the related costs.
Conclusions
The sustainable management of urban trees is of high importance but there are no proper practical tools or theoretical concepts available yet. Here we propose a great step forward to do this by converting a (theoretical and practical) tool from forest management to the urban setting. So far, the new establishment of trees, species selection, replacement of drop out trees, or removal of old trees followed practical circumstances, had been hardly planned, quantified and often even not well documented. The main achievement of this study is the transfer and adaption of the concept of age class balancing and sustainability planning from forests to urban tree stocks. We develop the prototype of a simple yet flexible and expandable model for sustainability planning of urban-tree ecosystem service provision. In addition, based on the analysis and discussion, the model can be further developed to cover a multitude of services that depend on tree dimension or leaf area.
References
Alvey AA (2006) Promoting and preserving biodiversity in the urban forest. Urban Forestry Urban Green 5(4):195–220
An N, Dou J, González JE, Bornstein RD, Miao S, Li L (2020) An observational case study of synergies between an intense heatwave and the urban heat island in Beijing. J Appl Meteorol Climatol. https://doi.org/10.1175/JAMC-D-19-0125.1
Angold PG, Sadler JP, Hill MO, Pullin A, Rushton S, Austin K, Thompson K (2006) Biodiversity in urban habitat patches. Sci Total Environ 360(1–3):196–204
Assmann E, Franz F (1965) Vorläufige Fichten-Ertragstafel für Bayern. Forstw Cbl 84(1):13–43
Bachofen H (1999) Gleichgewicht, Struktur und Wachstum in Plenterbeständen| Equilibrium, structure and increment in selection forest stands. Schweizerische Zeitschrift für Forstwesen 150(5):157–170
Berger U, Hildenbrandt H, Grimm V (2004) Age-related decline in forest production: modelling the effects of growth limitation, neighbourhood competition and self-thinning. J Ecol 92:846–853
Bodnaruk EW, Kroll CN, Yang Y, Hirabayashi S, Nowak DJ, Endreny TA (2017) Where to plant urban trees? A spatially explicit methodology to explore ecosystem service tradeoffs. Landscape Urban Plann 157:457–467
Brack CL (2006) Updating urban forest inventories: An example of the DISMUT model. Urban Forestry Urban Green 5(4):189–194
Bruce D, Schumacher FX (1950) Forest mensuration, 3rd edn. The American Forestry Series, McGraw-Hill Inc, New York, Toronto, London, p 483
Buongiorno J, Michie BR (1980) A matrix model of uneven-aged forest management. Forest Sci 26(4):609–625
Caicoya AT, Pretzsch H (2020) Stand density biases the estimation of the site index especially on dry sites. Can J For Res. https://doi.org/10.1139/cjfr-2020-0389
Chen W (2015) The role of urban green infrastructure in offsetting carbon emissions in 35 major Chinese cities: A nationwide estimate. Cities 44:112–120
Emberson LD, Wieser G, Ashmore MR (2000) Modelling of stomatal conductance and ozone flux of Norway spruce: comparison with field data. Environ Pollut 109(3):393–402
Ferrini F, Bussotti F, Tattini M, Fini A (2014) Trees in the urban environment: response mechanisms and benefits for the ecosystem should guide plant selection for future plantings. Agrochimica 58:234–246
Forrester DI, Tachauer IHH, Annighoefer P, Barbeito I, Pretzsch H, Ruiz-Peinado R, Stark H, Vacchiano G, Zlatanov T, Chakraborty T, Saha S, Sileshi GW (2017) Generalized biomass and leaf area allometric equations for European tree species incorporating stand structure, tree age and climate. Forest Ecol Manag 396:160–175
Gillner S, Bräuning A, Roloff A (2014) Dendrochronological analysis of urban trees: climatic response and impact of drought on frequently used tree species. Trees 28(4):1079–1093
Gómez-Baggethun E, Barton DN (2013) Classifying and valuing ecosystem services for urban planning. Ecol Econ 86:235–245
Grote R, Samson R, Alonso R, Amorim JH, Cariñanos P, Churkina G, Paoletti E (2016) Functional traits of urban trees: air pollution mitigation potential. Front Ecol Environm 14(10):543–550
Hanewinkel M, Hummel S, Albrecht A (2011) Assessing natural hazards in forestry for risk management: a review. Eur J Forest Res 130(3):329–351
Hilbert DR, Roman LA, Koeser AK, Vogt J (2019) van Doorn, NS (2019) Urban tree mortality: a literature review. Arboricul Urban Forestry 45(5):167–200
Hofman J, Bartholomeus H, Janssen S, Calders K, Wuyts K, Van Wittenberghe S, Samson R (2016) Influence of tree crown characteristics on the local PM10 distribution inside an urban street canyon in Antwerp (Belgium): A model and experimental approach. Urban Urban Forestry Urban Green 20:265–276
Hundeshagen JC (1826) Die Forstabschätzung auf neuen wissenschaftlichen Grundlagen. Verlag Heinrich Laupp, Tübingen
Hundeshagen JC (1828) Encyclopädie der Forstwissenschaft, 2nd edn. Verlag Heinrich Laupp, Tübingen
Ignatieva M, Stewart GH, Meurk C (2011) Planning and design of ecological networks in urban areas. Landscape Eecol Eng 7(1):17–25
Jim CY (2004) Evaluation of heritage trees for conservation and management in Guangzhou city (China). Environ Manag 33:74–86
Jim CY, Chen WY (2009) Ecosystem services and valuation of urban forests in China. Cities 26:187–194
Kan H, Chen B (2004) Particulate air pollution in urban areas of Shanghai, China: health-based economic assessment. Sci Total Environ 322(1–3):71–79
Khan T, Conway TM (2020. Vulnerability of Common Urban Forest Species to Projected Climate Change and Practitioners Perceptions and Responses. Environ Manag 1–14
Kjelgren RK, Clark JR (1992) Microclimates and tree growth in three urban spaces. J Environm Horticul 10(3):139–145
Knigge W, Schulz H (1966) Grundriss der Forstbenutzung. Verlag Paul Parey, Hamburg, p 584
Liu L, Coops NC, Aven NW, Pang Y (2017) Mapping urban tree species using integrated airborne hyperspectral and LiDAR remote sensing data. Remote Sens Environ 200:170–182
Livesley SJ, McPherson EG, Calfapietra C (2016) The urban forest and ecosystem services: Impacts on urban water, heat, and pollution cycles at the tree, street, and city scale. J Environ Qual 45:119–124
Lizée MH, Mauffrey JF, Tatoni T, Deschamps-Cottin M (2011) Monitoring urban environments on the basis of biological traits. Ecol Ind 11(2):353–361
McCarthy MP, Best MJ, Betts RA (2010) Climate change in cities due to global warming and urban effects. Geophys Res Lett. https://doi.org/10.1029/2010GL042845
McDonnell MJ, Hahs AK (2013) The future of urban biodiversity research: moving beyond the ‘low-hanging fruit.’ Urban Ecosyst 16(3):397–409
McPherson EG, Xiao QF, Aguaron E (2013) A new approach to quantify and map carbon stored, sequestered and emissions avoided by urban forests. Landscape Urban Plann 120:70–84
McPherson EG, van Doorn NS, Peper PJ (2016) Urban tree database and allometric equations. U.S, Department of Agriculture, Forest Service, Albany, CA, p 86
Meyer HA (1952) Structure, growth, and drain in balanced uneven-aged forests. J Forest 50(2):85–92
Moll G (1989) Improving the health of the urban forest. In: Moll G, Ebenreck S (eds) A Resource Guide for Urban and Community Forests. Island Press, Washington, pp 119–130
Morgenstern EK (2007) The origin and early application of the principle of sustainable forest management. Forestry Chronicle 83(4):485–489
Moser A, Rötzer T, Pauleit S, Pretzsch H (2015) Structure and ecosystem services of small-leaved lime (Tilia cordata Mill.) and black locust (Robinia pseudoacacia L.) in urban environments. Urban Forestry Urban Green 14(4):1110–1121
Moser A, Rötzer T, Pauleit S, Pretzsch H (2018a) Stadtbäume: Wachstum, Funktionen und Leistungen – Risiken und Forschungsperspektiven. Allg Forst- u J-Ztg 188(5/6):94–111
Moser A, Uhl E, Rötzer T, Biber P, Caldentey JM, Pretzsch H (2018b) Effects of climate trends and drought events on urban tree growth in Santiago de Chile. Ciencia e Investigación AGRARIA 45(1):1–11. https://doi.org/10.7764/rcia.v45il.1832
Moser-Reischl A, Rahman MA, Pauleit S, Pretzsch H, Rötzer T (2019) Growth patterns and effects of urban micro-climate on two physiologically contrasting urban tree species. Landscape Urban Plann 183:88–99
Moser-Reischl, A, Rötzer, T, Pauleit, S, Pretzsch, H. (2021) Urban tree growth characteristics of four common species in South Germany. Arboric Urban Forestry
Muller N, Werner P, Kelcey JG (2010) Urban biodiversity and design. John Wiley & Sons, The Netherland
Nowak DJ (1994) Air pollution removal by Chicago's urban forest. In: Chicago's Urban Forest Ecosystem: Results of the Chicago Urban Forest Climate Project. McPherson EG, Nowak DJ, Rowntree R A (Eds.), General Technical Report, USDA Forest Service, Radnor, PA
Nowak DJ (2002) The Effects of Urban Forests on the Physical Environment. In: Randrup TB, Konijnendijk CC, Christophersen T, Nilsson K (Eds.) COST Action E12 Urban Forests and Urban Trees, Proceedings No. 1. Office for Official Publications of the European Communities, Luxembourg, pp. 22–42
Nowak DJ, Crane DE (2002) Carbon storage and sequestration by urban trees in the USA. Environ Pollut 116(3):381–389
Nowak DJ, Kuroda M, Crane DE (2004) Tree mortality rates and tree population projections in Baltimore, Maryland, USA. Urban Forestry Urban Green 2(3):139–147
Nowak DJ, Crane DE, Stevens JC (2006) Air pollution removal by urban trees and shrubs in the United States. Urban Forestry Urban Green 4(3–4):115–123
Nowak DJ, Crane DE, Stevens JC, Hoehn RE, Walton JT, Bond J (2008) A ground-based method of assessing urban forest structure and ecosystem services. Aboric Urban Forestry 34(6):347–358
Nowak DJ, Robert III E, Bodine AR, Crane DE, Dwyer JF, Bonnewell V, Watson G (2013) Urban trees and forests of the Chicago region. Resour Bull NRS-84. Newtown Square, PA: US Department of Agriculture, Forest Service, Northern Research Station: 1–106
Pace R, De Fino F, Rahman MA et al (2020) A (2020) A single tree model to consistently simulate cooling, shading, and pollution uptake of urban trees. Int J Biometeorol. https://doi.org/10.1007/s00484-020-02030-8
Pauleit S, Jones N, Garcis-Martin G, Garcia-Valdecantos JL, Riviere LM, Vidal- Beaudet L, Bodson M, Randrup TB (2002) Tree establishment practise in towns and cities – result from a European survey. Urban Forestry Urban Green 1(2):83–96
Pickett ST, Grove JM (2009) Urban ecosystems: What would Tansley do? Urban Ecosyst 12(1):1–8
Pretzsch H (2001) Modellierung des Waldwachstums. Blackwell Wissenschafts-Verlag, Berlin, p 336
Pretzsch H (2009) Forest dynamics, growth, and yield. In Forest dynamics, growth and yield (pp. 1–39). Springer, Berlin, Heidelberg
Pretzsch H (2014) Canopy space filling and tree crown morphology in mixed-species stands compared with monocultures. For Ecol Manag 327:251–264
Pretzsch H (2019) The effect of tree crown allometry on community dynamics in mixed-species stands versus monocultures. A review and perspectives for modeling and silvicultural management. Forests 10(9):810
Pretzsch H (2020) The course of tree growth. Theory and reality. Forest Ecol Manag 478:118508
Pretzsch H, Biber P, Ďurský J, Von Gadow K, Hasenauer H, Kändler G, Skovsgaard JP (2002) Recommendations for standardized documentation and further development of forest growth simulators. Forstwissenschaftliches Centralblatt vereinigt mit Tharandter Forstliches Jahrbuch 121(3):138–151
Pretzsch H, Grote R, Reineking B, Rötzer T, Seifert S (2008) Models for forest ecosystem management: A European perspective. Ann Bot 101:1065–1087
Pretzsch H, Biber P, Uhl E, Dahlhausen J, Rötzer T, Caldentey J, Du Toit B (2015) Crown size and growing space requirement of common tree species in urban centres, parks, and forests. Urban Forestry Urban Green 14(3):466–479
Pretzsch H, Biber P, Uhl E, Dahlhausen J, Schütze G, Perkins D, Rötzer T, Caldentey J, Koike T, van Con T, Chavanne A, du Toit B, Foster K, Lefer B (2017) Climate change accelerates growth of urban trees in metropolises worldwide. Scient Rep. https://doi.org/10.1038/s41598-017-14831-w
Rahman MA, Armson D, Ennos AR (2015) A comparison of the growth and cooling effectiveness of five commonly planted urban tree species. Urban Ecosyst 18(2):371–389
Rahman MA, Moser A, Rötzer T, Pauleit S (2017a) Microclimatic differences and their influence on transpirational cooling of Tilia cordata in two contrasting street canyons in Munich. Germany Agricul Forest Meteorol 232:443–456
Rahman MA, Moser A, Rötzer T, Pauleit S (2017b) Within canopy temperature differences and cooling ability of Tilia cordata trees grown in urban conditions. Build Environ 114:118–128
Rahman MA, Moser A, Rötzer T, Pauleit S (2019) Comparing the transpirational and shading effects of two contrasting urban tree species. Urban Ecosyst 22:683–697
Rahman MA, Hartmann C, Moser-Reischl A, von Strachwitz MF, Paeth H, Pretzsch H, Rötzer T (2020b) Tree cooling effects and human thermal comfort under contrasting species and sites. Agricul Forest Meteorol 287:107947
Rahman MA, Stratopoulos LM, Moser-Reischl A, Zölch T, Häberle KH, Rötzer T, Pauleit S (2020a) Traits of trees for cooling urban heat islands: a meta-analysis. Build Environm 106606
Roloff A, Korn S, Gillner S (2009) The Climate-Species-Matrix to select tree species for urban habitats considering climate change. Urban Forestry Urban Green 8:295–308
Roman LA, Scatena FN (2011) Street tree survival rates: Meta-analysis of previous studies and application to a field survey in Philadelphia, PA, USA. Urban Forestry Urban Green 10:269–274
Rötzer, T (2021) Stadtbäume im Klimawandel: Wuchsverhalten, Ökosystemleistungen und Perspektiven. Kommunen klimafit machen: Mikroklima, Hitzestau und Starkniedershläge Anpassungsstrategien für die Praxis einer klimaangepassten Stadtentwicklung. Beiträge der Akademie für Natur- und Umweltschutz Baden Württemberg, Band 57. Wissenschaftliche Verlagsgesellschaft, Stuttgart
Rötzer T, Biber P, Moser A, Schäfer C, Pretzsch H (2017) Stem and root diameter growth of European beech and Norway spruce under extreme drought. For Ecol Manag 406:184–195
Rötzer T, Rahman MA, Moser-Reischl A, Pauleit S, Pretzsch H (2019) Process based simulation of tree growth and ecosystem services of urban trees under present and future climate conditions. Sci Total Environ 676:651–664
Rötzer T, Reischl A, Rahman M, Pretzsch H, Pauleit S (2020a, in press) Leitfaden für Stadtbäume in Bayern: Handlungsempfehlungen aus dem Projekt Stadtbäume – Wachstum, Umweltleistungen und Klimawandel. Hrsg.: Zentrum für Stadtnatur und Klimaanpassung. Selbstverlag Bayerisches Staatsministerium für Umwelt und Verbraucherschutz, München, 72 p
Rötzer T, Moser-Reischl A, Rahman MA, Grote R, Pauleit S, Pretzsch H (2020b) Modelling urban tree growth and ecosystem services: review and perspectives. In: Progress in Botany. Springer, Heidelberg. https://doi.org/10.1007/124_2020_46
Roy S, Byrne J, Pickering C (2012) A systematic quantitative review of urban tree benefits, costs, and assessment methods across cities in different climatic zones. Urban Forestry Urban Green 11:351–363
Russo A, Escobedo FJ, Timilsina N, Zerbe S (2015) Transportation carbon dioxide emission offsets by public urban trees: A case study in Bolzano, Italy. Urban Forestry Urban Green 14:398–403
Salo S, Tahvonen O (2002) On equilibrium cycles and normal forests in optimal harvesting of tree vintages. J Environm Econom Manag 44(1):1–22
Samson R, Ningal T, Tiwary A, Grote R, Fares S, Saaroni H, Hiemstra JA, Zhiyanski M, Vilhar U, Cariñanos P, Järvi L, Przybysz A, Moretti M, Zürcher N (2017) Species-Specific Information for Enhancing Ecosystem Services. In: The Urban Forest - Cultivating Green Infrastructure for People and the Environment. Pearlmutter D, Calfapietra C, Samson R, O'Brien L, Krajter Ostoić S, Sanesi G, Alonso del Amo R (Eds.), Springer International Publishing, Berlin
Samson R, Moretti M, Amorim JH, Branquinho C, Fares S, Morelli F, Niinemets Ü, Paoletti E, Pinho P, Sgrigna G, Stojanovski V, Tiwary A, Sicard P, Calfapietra C (2019) Towards an integrative approach to evaluate the environmental ecosystem services provided by urban forests. J Forestry Res 30:1981–1996
Sieghardt M, Mursch-Radlgruber E, Paoletti E, Couenberg E, Dimitrakopoulus A, Rego F, Hatzistathis A, Barfoed Randrup, T (2005) The Abiotic Urban Environment: Impact of Urban Growing Conditions on Urban Vegetation. In: Urban Forests and Trees, Konijnendijk C, Nilsson K, Randrup T, Schipperijn J (Eds.), Springer Berlin Heidelberg
Simon H, Lindén J, Hoffmann D, Braun P, Bruse M, Esper J (2018) Modeling transpiration and leaf temperature of urban trees - A case study evaluating the microclimate model ENVI-met against measurement data. Landscape Urban Plann 174:33–40
Sjöman H, Östberg J, Bühler O (2012) Diversity and distribution of the urban tree population in ten major Nordic cities. Urban Forestry Urban Green 11:31–39
Speidel G (1972) Planung im Forstbetrieb. Verlag Paul Parey, Hamburg, p 267
Stagoll K, Lindenmayer DB, Knight E, Fischer J, Manning AD (2012) Large trees are keystone structures in urban parks. Conserv Lett 5(2):115–122
Strunk JL, Mills JR, Ries P, Temesgen H, Jeroue L (2016) An urban forest-inventory-and-analysis investigation in Oregon and Washington. Urban Forest Urban Green 18:100–109
Tanhuanpää T, Vastaranta M, Kankare V, Holopainen M, Hyyppä J, Hyyppä H, Raisio J (2014) Mapping of urban roadside trees–A case study in the tree register update process in Helsinki City. Urban Forestry Urban Green 13(3):562–570
Tzoulas K, Korpela K, Venn S, Yli-Pelkonen V, Kaźmierczak A, Niemela J, James P (2007) Promoting ecosystem and human health in urban areas using Green Infrastructure: A literature review. Landscape Urban Plann 81(3):167–178
United Nations (2018) Department of Economic and Social Affairs, https://www.un.org/development/desa/en/news/population/2018-revision-of-world-urbanization- prospects.html, accessed March 1st, 2020
Carlowitz von HC (1713) Sylvicultura Oekonomica oder Haußwirthliche Nachricht und Naturmäßige Anweisung zur wilden Baum-Zucht. JF Braun, Leipzig
Cotta H. von (1820) Anweisung zur Forsteinrichtung und Abschätzung (Vol. 1). Arnold. p.180
Gadow K von (2005) Forsteinrichtung: Analyse und Entwurf der Waldentwicklung. Universitätsdrucke Göttingen, 342 p.
Watkins JHR, Cameron RW, Sjöman H, Hitchmough JD (2020) Using big data to improve ecotype matching for Magnolias in urban forestry. Urban Forestry Urban Green 126580
Weisser W, Hauck T (2017) Animal-aided design-using a species life-cycle to improve open space planning and conservation in cities and elsewhere. bioRxiv, 150359
Weisser W, Hauck T (2018) Animal-aided design-bridging the gap between landscape architecture and conservation. In: 2018 ESA Annual Meeting (August 5--10). ESA, 2018
Xiao QF, McPherson EG (2016) Surface water storage capacity of twenty tree species in Davis, California. J Environ Qual 45:188–198
Zeide B (1993) Analysis of growth equations. Forest Sci 39(3):594–616
Zhang J, Huang S, He F (2015) Half-century evidence from western Canada shows forest dynamics are primarily driven by competition followed by climate. Proc Natl Acad Sci 112(13):4009–4014
Acknowledgements
The authors wish to thank the German Science Foundation (Deutsche Forschungsgemeinschaft) for funding the projects “Impact of trees on the urban microclimate under climate change: Mechanisms and ecosystem services of urban tree species in temperate, Mediterranean and arid major cities” (PR 292/ 21-1 and PA 2626/3-1). We would also like to thank the Bavarian State Ministry of the Environment and Consumer Protection for funding the projects “Urban trees under climate change: growth, functions & services, and perspectives” (TUF01UF-64971), “Climate experience Würzburg: Influence of trees on the micro climate of the city of Würzburg” (TKP01KPB-71924) and "Ecosystem services of urban green at public squares in Munich" (TEW01CO2P-75382). Thanks also go to anonymous reviewers for their constructive criticism.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Contributions
HP developed the idea and HP, TR, and SP initiated the study. HP developed the simulation program and TR and AMR the scenario design. HP, TR, and MR wrote the manuscript. AMR and SP revised the manuscript.
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Pretzsch, H., Moser-Reischl, A., Rahman, M.A. et al. Towards sustainable management of the stock and ecosystem services of urban trees. From theory to model and application. Trees 37, 177–196 (2023). https://doi.org/10.1007/s00468-021-02100-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00468-021-02100-3