
Abstract
Background
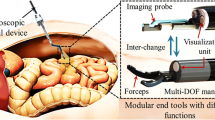
The aim of this study was to enhance the visual feedback of surgeons, during robotic surgeries, by designing and developing an actuated 2D imaging probe, which is used in conjunction with the traditional stereoscopic camera of the da Vinci surgical system. The probe provides the surgeon with additional visual cues, overcoming visualization constraints encountered during certain scenarios of robot-assisted minimally invasive surgery.
Methods
The actuated imaging probe is implemented as a master–slave tele-manipulated system, and it is designed to be compatible with the da Vinci surgical system. The detachable probe design enables it to be mounted on any of the EndoWrist® instruments of the robot and is controlled by the surgeon using a custom-made pedal system. The image from the 2D probe is rendered along with the stereoscopic view on the surgeon’s console.
Results
The experimental results demonstrate the effectiveness of the proposed actuated imaging probe when used as an additional visualization channel and in surgical scenarios presenting visual problems due to tissue occlusion.
Conclusion
The study shows the potential benefits of an additional actuated imaging probe when used in conjunction with traditional surgical instruments to perform surgical tasks requiring visualization from multiple orientations and workspaces.






Similar content being viewed by others


References
Yoshida M, Furukawa T, Morikawa Y, Kitagawa Y, Kitajima M (2010) The developments and achievements of endoscopic surgery, robotic surgery and function-preserving surgery. Jpn J Clin Oncol 40:863–869
Ballantyne GH, Moll F (2003) The da Vinci telerobotic surgical system: the virtual operative field and telepresence surgery. Surg Clin North Am 83:1293–1304
Kim HL, Schulam P (2004) The PAKY, HERMES, AESOP, ZEUS, and da Vinci robotic systems. Urol Clin North Am 31:659–669
Breedveld P (1997) Observation, manipulation, and eye-hand coordination problems in minimally invasive surgery. In: European conference on human decision making and manual control (ed) Proceedings of the 16th European conference on human decision making and manual control, Kassel, pp 219–231
Hofmeister J, Frank TG, Cuschieri A, Wade NJ (2001) Perceptual aspects of two-dimensional and stereoscopic display techniques in endoscopic surgery: review and current problems. Semin Laparosc Surg 8:12–24
Munro MG (2002) Laparoscopic access: complications, technologies, and techniques. Curr Opin Obstet Gynecol 14:365–374
Weber PA, Merola S, Wasielewski A, Ballantyne GH (2002) Telerobotic-assisted laparoscopic right and sigmoid colectomies for benign disease. Dis Colon Rectum 45:1689–1696
Hambraeus M, Arnbjornsson E, Anderberg M (2013) A literature review of the outcomes after robot-assisted laparoscopic and conventional laparoscopic Nissen fundoplication for gastro-esophageal reflux disease in children. Int J Med Robot Comput Assist Surg: MRCAS 9:428–432
Cadiere GB, Himpens J, Vertruyen M, Favretti F (1999) The world’s first obesity surgery performed by a surgeon at a distance. Obes Surg 9:206–209
Mohr FW, Falk V, Diegeler A, Walther T, Gummert JF, Bucerius J, Jacobs S, Autschbach R (2001) Computer-enhanced “robotic” cardiac surgery: experience in 148 patients. J Thorac Cardiovasc Surg 121:842–853
Kappert U, Cichon R, Gulielmos V, Schneider J, Schramm I, Nicolai J, Tugtekin SM, Schueler S (2000) Robotic-enhanced Dresden technique for minimally invasive bilateral internal mammary artery grafting. Heart Surg Forum 3:319–321
Heemskerk J, Zandbergen R, Maessen JG, Greve JW, Bouvy ND (2006) Advantages of advanced laparoscopic systems. Surg Endosc 20:730–733
Ota T, Degani A, Schwartzman D, Zubiate B, McGarvey J, Choset H, Zenati MA (2009) A highly articulated robotic surgical system for minimally invasive surgery. Ann Thorac Surg 87:1253–1256
Oleynikov D, Rentschler M, Hadzialic A, Dumpert J, Platt SR, Farritor S (2005) Miniature robots can assist in laparoscopic cholecystectomy. Surg Endosc 19:473–476
Rentschler ME, Dumpert J, Platt SR, Ahmed SI, Farritor SM, Oleynikov D (2006) Mobile in vivo camera robots provide sole visual feedback for abdominal exploration and cholecystectomy. Surg Endosc 20:135–138
Yoon HS, Choi Y, Yi BJ (2010) A 4-DOF bendable endoscope mechanism for single port access surgery, workshop. Snakes, worms and catheters: continuum and serpentine robots for minimally invasive surgery. IEEE international conference on robotics and automation
Simaan N, Xu K, Kapoor A, Wei W, Kazanzides P, Flint P, Taylor R (2009) Design and integration of a telerobotic system for minimally invasive surgery of the throat. Int J Robot Res 28:1134–1153
Dupont PE, Lock J, Butler E (2009) Torsional kinematic model for concentric tube robots. In: EEE international conference on robotics and automation, pp 3851–3858
Mahvash M, Dupont PE (2011) Stiffness control of surgical continuum manipulators. IEEE Trans Robot 27:334–345
Costello GA (1977) Large deflections of helical spring due to bending. J Eng Mech Div 103:481–487
Velasquez CA, King HH, Hannaford B, Yoon WJ (2012) Development of a flexible imaging probe integrated to a surgical telerobot system: preliminary remote control test and probe design. In: Biomedical robotics and biomechatronics (BioRob) 2012 4th IEEE RAS & EMBS international conference on, pp 894–898
Yoon WJ, Velasquez CA, White LW, Hannaford B, Sang Kim Y, Lendvay TS (2013) Preliminary articulable probe designs with RAVEN and challenges: image-guided robotic surgery multitool system. ASME J Med Devices 8(1):014505
Post and Sleeve, 3-D MED (2015) https://www.3-dmed.com/product/post-and-sleeve-4. Accessed 01 May 2015
Kaouk J, Khalifeh A, Hillyer S, Haber GP, Stein R, Autorino R (2012) Robot-assisted laparoscopic partial nephrectomy: step-by-step contemporary technique and surgical outcomes at a single high-volume institution. Eur Urol 62(3):553–561
Cerfolio RJ, Bryant AS (2012) Robotic-assisted pulmonary resection—right upper lobectomy. Ann Cardiothorac Surg 1(1):77–85. doi:10.3978/j.issn.2225-319X.2012.04.12
Acknowledgments
This work was partially supported by the National Priorities Research Program (NPRP) under Grant NPRP 09-776-2-298 from the Qatar National Research Fund (a member of Qatar Foundation). The statements made herein are solely the responsibility of the authors. We would like to thank Dr. Jean-Marc Peyrat for his assistance in the experiments.
Disclosures
Drs. Carlos A. Velasquez, Nikhil V. Navkar, Amer Alsaied, Shidin Balakrishnan, Julien Abinahed, Abdulla A. Al-Ansari, and W. Jong Yoon have no conflict of interest or financial ties to disclose.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Velasquez, C.A., Navkar, N.V., Alsaied, A. et al. Preliminary design of an actuated imaging probe for generation of additional visual cues in a robotic surgery. Surg Endosc 30, 2641–2648 (2016). https://doi.org/10.1007/s00464-015-4270-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-015-4270-2