
Abstract
Background
A major challenge of minimally invasive esophagectomy is the uncertainty about the exact location of the tumor and associated lymph nodes. This study aimed to develop a navigation system for visualizing surgical instruments in relation to the tumor and anatomic structures in the chest.
Methods
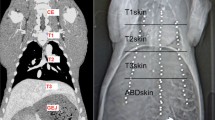
An immobilization device consisting of a vacuum mattress fixed to a stretcher was built to decrease patient movement and organ deformation. Computer tomography (CT) markers were embedded in the stretcher at a defined distance to a detachable plate with optical markers on the side of the stretcher. A second plate of optical markers was fixed to the operating instrument. These two optical marker plates were tracked with an optical tracking system. Their positions were then registered in a preoperative CT data set using the authors’ navigation software. This allowed a real-time visualization of the instrument and target structures. To assess the accuracy of the system, the authors designed a phantom consisting of a box containing small spheres in a specific three-dimensional layout. The positions of the spheres were first measured with the navigation system and then compared with the known real positions to determine the accuracy of the system.
Results
In the accuracy assessment, the navigation system showed a precision of 0.95 ± 0.78 mm. In a test data set, the instrument could be successfully navigated to the tumor and target structures.
Conclusion
The described navigation system provided real-time information about the position and orientation of the working instrument in relation to the tumor in an experimental setup. Consequently, it might improve minimally invasive esophagectomy and allow for surgical dissection in an adequate distance to the tumor margin and ease the location of affected lymph nodes.



Similar content being viewed by others


References
Nguyen NT, Follette DM, Wolfe BM, Schneider PD, Roberts P, Goodnight JE Jr (2000) Comparison of minimally invasive esophagectomy with transthoracic and transhiatal esophagectomy. Arch Surg 135:920–925
Nishimaki T, Shimoji H, Sunagawa H (2004) Recent changes and the future roles of esophageal cancer surgery. Ann Thorac Cardiovasc Surg 10:324–332
Smithers BM, Gotley DC, Martin I, Thomas JM (2007) Comparison of the outcomes between open and minimally invasive esophagectomy. Ann Surg 245:232–240
Swanstrom LL, Hansen P (1997) Laparoscopic total esophagectomy. Arch Surg 132:943–947, discussion 947–949
Hulscher JB, Tijssen JG, Obertop H, van Lanschot JJ (2001) Transthoracic versus transhiatal resection for carcinoma of the esophagus: a meta-analysis. Ann Thorac Surg 72:306–313
Avital S, Zundel N, Szomstein S, Rosenthal R (2005) Laparoscopic transhiatal esophagectomy for esophageal cancer. Am J Surg 190:69–74
DePaula AL, Hashiba K, Ferreira EA, de Paula RA, Grecco E (1995) Laparoscopic transhiatal esophagectomy with esophagogastroplasty. Surg Laparosc Endosc 5:1–5
Espat NJ, Jacobsen G, Horgan S, Donahue P (2005) Minimally invasive treatment of esophageal cancer: laparoscopic staging to robotic esophagectomy. Cancer J 11:10–17
Gutt CN, Bintintan VV, Koninger J, Muller-Stich BP, Reiter M, Buchler MW (2006) Robotic-assisted transhiatal esophagectomy. Langenbecks Arch Surg 391:428–434
Luketich JD, Schauer PR, Christie NA, Weigel TL, Raja S, Fernando HC, Keenan RJ, Nguyen NT (2000) Minimally invasive esophagectomy. Ann Thorac Surg 70:906–911, discussion 911–902
Martin DJ, Bessell JR, Chew A, Watson DI (2005) Thoracoscopic and laparoscopic esophagectomy: initial experience and outcomes. Surg Endosc 19:1597–1601
Orringer MB, Marshall B, Stirling MC (1993) Transhiatal esophagectomy for benign and malignant disease. J Thorac Cardiovasc Surg 105:265–276, discussion 276–267
Gutt CN, Oniu T, Mehrabi A, Schemmer P, Kashfi A, Kraus T, Buchler MW (2004) Circulatory and respiratory complications of carbon dioxide insufflation. Dig Surg 21:95–105
Harrell AG, Heniford BT (2005) Minimally invasive abdominal surgery: lux et veritas past, present, and future. Am J Surg 190:239–243
Luketich JD, Alvelo-Rivera M, Buenaventura PO, Christie NA, McCaughan JS, Litle VR, Schauer PR, Close JM, Fernando HC (2003) Minimally invasive esophagectomy: outcomes in 222 patients. Ann Surg 238:486–494, discussion 494–485
Galvani C, Gorodner MV, Moser F, Baptista M, Donahue P, Horgan S (2006) Laparoscopic Heller myotomy for achalasia facilitated by robotic assistance. Surg Endosc 20:1105–1112
Nguyen NT, Schauer P, Luketich JD (2000) Minimally invasive esophagectomy for Barrett’s esophagus with high-grade dysplasia. Surgery 127:284–290
Hanisch E, Markus B, Gutt C, Schmandra TC, Encke A (2001) Robot-assisted laparoscopic cholecystectomy and fundoplication: initial experiences with the Da Vinci system. Chirurg 72:286–288
Heller K, Gutt C, Schaeff B, Beyer PA, Markus B (2002) Use of the robot system Da Vinci for laparoscopic repair of gastro-oesophageal reflux in children. Eur J Pediatr Surg 12:239–242
Elli E, Espat NJ, Berger R, Jacobsen G, Knoblock L, Horgan S (2004) Robotic-assisted thoracoscopic resection of esophageal leiomyoma. Surg Endosc 18:713–716
Dubin MG, Kuhn FA (2005) Stereotactic computer-assisted navigation: state of the art for sinus surgery, not standard of care. Otolaryngol Clin North Am 38:535–549
Grunert P, Darabi K, Espinosa J, Filippi R (2003) Computer-aided navigation in neurosurgery. Neurosurg Rev 26:73–99, discussion 100–101
McInerney J, Roberts DW (2000) Frameless stereotaxy of the brain. Mt Sinai J Med 67:300–310
Raabe A, Krishnan R, Seifert V (2003) Actual aspects of image-guided surgery. Surg Technol Int 11:314–319
Reinhardt H, Trippel M, Westermann B, Gratzl O (1999) Computer aided surgery with special focus on neuronavigation. Comput Med Imaging Graph 23:237–244
Sindwani R, Metson R (2005) Image-guided frontal sinus surgery. Otolaryngol Clin North Am 38:461–471
Wolf I, Vetter M, Wegner I, Bottger T, Nolden M, Schobinger M, Hastenteufel M, Kunert T, Meinzer HP (2005) The medical imaging interaction toolkit. Med Image Anal 9:594–604
Broeders IA, Ruurda JP (2002) Robotics in laparoscopic surgery: current status and future perspectives. Scand J Gastroenterol Suppl 236:76–80
Kenngott H, Neuhaus J, Gutt CN, Wolf I, Meinzer HP, Vetter M (2006) Entwicklung eines Navigationssystems für die telemanipulatorgestützte Oesophagektomie. In: Meinzer HP, Handels H, Horsch A, Tolxdorff T (eds) Bildverarbeitung für die Medizin 2006. Springer, Heidelberg pp 331–334
Khadem R, Yeh CC, Sadeghi-Tehrani M, Bax MR, Johnson JA, Welch JN, Wilkinson EP, Shahidi R (2000) Comparative tracking error analysis of five different optical tracking systems. Comput Aided Surg 5:98–107
Hummel J, Figl M, Birkfellner W, Bax MR, Shahidi R, Maurer CR Jr, Bergmann H (2006) Evaluation of a new electromagnetic tracking system using a standardized assessment protocol. Phys Med Biol 51:N205–N210
Hummel J, Figl M, Kollmann C, Bergmann H, Birkfellner W (2002) Evaluation of a miniature electromagnetic position tracker. Med Phys 29:2205–2212
Schicho K, Figl M, Donat M, Birkfellner W, Seemann R, Wagner A, Bergmann H, Ewers R (2005) Stability of miniature electromagnetic tracking systems. Phys Med Biol 50:2089–2098
Keller BP, Lubbert PH, Keller E, Leenen LP (2005) Tissue–interface pressures on three different support surfaces for trauma patients. Injury 36:946–948
Luscombe MD, Williams JL (2003) Comparison of a long spinal board and vacuum mattress for spinal immobilisation. Emerg Med J 20:476–478
Nevinny-Stickel M, Sweeney RA, Bale RJ, Posch A, Auberger T, Lukas P (2004) Reproducibility of patient positioning for fractionated extracranial stereotactic radiotherapy using a double-vacuum technique. Strahlenther Onkol 180:117–122
Schou J, Kiermayer H, Ummenhofer W, Herion HP (2001) In search of the most suitable technique for truncal spinal immobilization with associated radiography. Eur J Emerg Med 8:89–92
Cuesta MA, van den Broek WT, van der Peet DL, Meijer S (2004) Minimally invasive esophageal resection. Semin Laparosc Surg 11:147–160
de Hoyos A, Litle VR, Luketich JD (2005) Minimally invasive esophagectomy. Surg Clin North Am 85:631–647
Nguyen NT, Gelfand D, Stevens CM, Chalifoux S, Chang K, Nguyen P, Luketich JD (2004) Current status of minimally invasive esophagectomy. Minerva Chir 59:437–446
Acknowledgments
The current study was conducted within the setting of Research Training Group 1126: Development of New Computer-Based Methods for the Future Workplace in Surgery founded by the German Research Foundation (DFG).
Author information
Authors and Affiliations
Corresponding author
Additional information
Hannes G. Kenngott and Jochen Neuhaus contributed equally to this study.
Rights and permissions
About this article
Cite this article
Kenngott, H.G., Neuhaus, J., Müller-Stich, B.P. et al. Development of a navigation system for minimally invasive esophagectomy. Surg Endosc 22, 1858–1865 (2008). https://doi.org/10.1007/s00464-007-9723-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-007-9723-9