
Abstract
We show that the Delaunay triangulation of a set of n points distributed nearly uniformly on a p-dimensional polyhedron (not necessarily convex) in d-dimensional Euclidean space is \(O(n^{\frac{d-k+1}{p}})\), where \(k = \lceil\frac{d+1}{p+1} \rceil\). This bound is tight in the worst case and improves on the prior upper bound for most values of p.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Overview
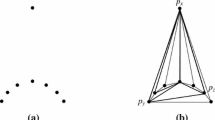
The Delaunay triangulation of a set of points is a fundamental geometric data structure, used in surface reconstruction, mesh generation, molecular modeling, geographic information systems, and many other areas of science and engineering. It is well known [12] that the complexity of the Delaunay triangulation of n points in dimension d is \(O(n^{\lceil \frac{d}{2} \rceil})\) and that this bound is achieved by distributions of points along one-dimensional curves such as the moment curve. But points distributed uniformly in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\), for instance, inside a d-dimensional ball, have Delaunay triangulations of complexity O(n); the constant factor is exponential in the dimension, but the dependence on the number of points is linear. We are interested in filling in the picture in between these two extremes, that is, when the points are distributed on a manifold of dimension 2≤p≤d−1. In this paper we consider the easy case of a p-dimensional polyhedron P.
Main Result
We consider a fixed p-dimensional polyhedron P in d-dimensional Euclidean space \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\). Our point set \(\ifmmode {S}\else {\mbox {\(S\)}}\fi \) is a sparse ε-sample from P. Sparse ε-sampling requires the sampling to be neither too sparse nor too dense. Our sampling model also contains the restriction that every face of P must be ε-sampled, not just those of the highest dimension. This kind of sampling is used in low dimensions for mesh generation, see, e.g., [4].
We consider the complexity of the Delaunay triangulation of \(\ifmmode {S}\else {\mbox {\(S\)}}\fi \) as \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \rightarrow0\), while P remains fixed, so that \(n = | \ifmmode {S}\else {\mbox {\(S\)}}\fi |\) goes to infinity. The main result in this paper is that the number of simplices of all dimensions is \(O(n^{\frac{d-k+1}{p}})\) where \(k = \lceil\frac{d+1}{p+1} \rceil\). The hidden constant factor depends, among other things, on the geometry of P, which is constant since P is fixed. This bound is tight in the worst case. In an earlier abstract [1], we had an upper bound of O(n (d−1)/p) (with a simpler proof), which is weaker for the smaller values of \(1 < p \leq\frac{d-1}{2}\) and matches the bound in this paper for larger values \(\frac{d-1}{2}< p \leq d\).
Prior Work
The complexity of the Delaunay triangulation of a set of points on a two-manifold in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{3}\) has received considerable attention, since such point sets arise in practice, and their Delaunay triangulations are found nearly always to have linear size. Golin and Na [8] proved that the Delaunay triangulation of a set of points distributed uniformly at random on the surface of a fixed convex polytope in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{3}\) has expected size O(n). They later [7] established an O(nlg6 n) upper bound for the case in which the points are distributed uniformly at random on the surface of a nonconvex polyhedron.
Attali and Boissonnat considered the problem using a sparse ε-sampling model similar to the one we use here, rather than a random distribution. For such a set of points distributed on a polygonal surface P, they showed that the size of the Delaunay triangulation is O(n) [2]. In a subsequent paper with Lieutier [3] they considered “generic” smooth surfaces and showed an upper bound of O(nlgn). A “generic” surface is one for which every ball with interior empty of surface points has at most a constant number of surface points on its boundary.
The genericity assumption is important. Erickson considered more general point distributions, which he characterized by the spread, the ratio of the largest inter-point distance to the smallest. The spread of a sparse ε-sample of n points from a two-dimensional manifold is \(O(\sqrt{n})\). Erickson proved that the Delaunay triangulation of a set of points in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{3}\) with spread Δ is O(Δ 3). Perhaps even more interestingly, he showed that this bound is tight for \(\varDelta =\sqrt{n}\), by giving an example of a sparse ε-sample of points from a cylinder that has a Delaunay triangulation of size Ω(n 3/2) [6]. This surface is not generic and has a degenerate medial axis.
To the best of our knowledge, our earlier abstract [1] is the only prior result for d>3.
Outline of the Proof
We begin with a simple lower bound, which illustrates the importance of the quantity \(k = \lceil\frac{d+1}{p+1} \rceil\) and motivates the upper bound.
At the coarsest level, the proof of the upper bound is similar to that of [1]: we map Delaunay simplices to the medial axis in such a way that each medial point can only correspond to a constant number of Delaunay simplices, and then we use a packing argument on the medial axis. But the tight bound seems to require us to consider some additional phenomena which occur in higher dimensions, but not in the familiar settings of dimensions two and three. The most important of these is the observation that when \(k = \lceil\frac{d+1}{p+1} \rceil> 2\), the vertices of any Delaunay simplex, which must span \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\), have to be drawn from k>2 faces of P. This allows us to relate Delaunay simplices to only the lower-dimensional parts of the medial axis, generated by k or more faces of P, the k-medial axis. This idea is embodied in Corollary 6. Because the k-medial axis is lower-dimensional, we can pack it with fewer balls, giving the tighter bound.
The mapping process, described in Sect. 6, takes a Delaunay ball Σ to a point z associated with the k-medial axis. We show in Sect. 7 that all of the original sample points inducing Σ lie near at least one of the projections of z onto the flats spanned by the faces of P; we say that z covers the sample points. This covering allows us to bound the number of Delaunay simplices by the size of the packing on the medial axis.
To motivate some of the complications in the mapping, let us sketch a simpler version which produces a point on the k-medial axis but not necessarily one which covers the sample points. We say that a ball is hollow if its interior does not intersect the polyhedron P. We begin with the center z of Σ, and the largest hollow ball B centered at z; B is tangent to at least one face of P. We choose a hyperplane H containing all of the faces to which B is tangent. Fixing the intersection B∩H, we move z in a straight line away from H, increasing its radius as necessary, until B becomes tangent to another face of P. We iterate, stopping when we run out of degrees of freedom; the final z must lie on the k-medial axis.
But notice that as z moves, the part of B on one side of H grows, while the other part shrinks. The difficulty is that B might shrink away from some of the original sample points inducing Σ, and as B recedes the projections of z onto faces of P may move away as well. In our earlier abstract [1], we started with a single tangent point and used only one iteration (going only to the 2-medial axis), so that the shrinking part was entirely within distance \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) of the first point of tangency. But during the additional iterations required for the tight bound, the multiple points of tangency can be far apart from each other, and the shrinking part of B can be quite large.
To get around this problem, we define in Sect. 4 a new structure related to the medial axis, the annular k-medial axis. An annulus in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\) is the symmetric difference between two concentric balls. An annulus is tangent to the boundary of P when either the inner bounding sphere or the outer bounding sphere of the annulus is tangent to the boundary of P. It is hollow when the inner bounding sphere is the boundary of a hollow ball. Just as the medial axis consists of the centers of hollow balls tangent to the boundary of P at more than one point, the annular medial axis consists of the centers of hollow annuli tangent to the boundary of P at more than one point.
At the beginning of the mapping process, we start with a hollow annulus with same center z as Σ, which encloses Σ and is tangent to P in at least one point. In each step of the iterative process, now, we move z until either the inner sphere or the outer sphere of the annulus becomes tangent to a new face. This prevents the spheres bounding the annulus from shrinking away from the faces of P containing the sample points inducing the original Delaunay ball Σ. This new mapping procedure produces a point z on the annular k-medial axis.
The annular k-medial axis is typically unbounded, so to apply a packing argument, we need to define (in Sect. 5) a bounded subset of it, the trimmed annular k-medial axis. By definition, this object has dimension at most d−k+1, and we prove that its (d−k+1)-dimensional volume is bounded from above by a constant that does not depend on ε. It follows that we can construct an ε-sample M of the trimmed annular k-medial axis with m=O(ε −(d−k+1)) points.
The mapping process in Sect. 6 produces a point z on trimmed annular k-medial axis. We define the cover of z in Sect. 7 as
where Π(z) is the set of all orthogonal projections of z onto the flats spanned by faces of P, and B(x,r) is the ball centered at x with radius r. We then assign z to the nearest sample z′∈M and argue that the cover of a point z′∈M, with r=5dε, contains only a constant number of points in S. Since each z′ is charged for a constant number of Delaunay simplices, it follows that the size of the Delaunay triangulation is bounded from above by the size of M, which is m=O(ε −(d−k+1)). Since our point set S is a sparse ε-sample from a p-dimensional polyhedron, its cardinality is n=Ω(ε −p). Eliminating ε gives the \(O(n^{\frac{d-k+1}{p}})\) upper bound.
We carefully structure the arguments so that we can avoid making any nondegeneracy assumptions on either P or the vertex set \(\ifmmode {S}\else {\mbox {\(S\)}}\fi \) of the Delaunay triangulation. This means that parts of the annular k-medial axis of a degenerate polyhedron may have dimension greater than d−k+1 (which is what one expects in the generic case). Nonetheless we can show that any simplex of the Delaunay triangulation is mapped to a part of the annular k-medial axis which does have dimension at most d−k+1, by mapping the simplex to an annulus tangent to at least k independent faces (Definition 4). Lemma 5 shows that k independent faces generate a piece of the correct dimension, and Lemma 14 shows that a simplex can be mapped to an annulus tangent to k independent faces.
2 Statement of Theorem
To formally state the theorem, we must first define the sampling condition.
2.1 Sampling
Let \(P\subseteq \ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi \) denote our input polyhedron, not necessarily convex or connected.Footnote 1 We assume that P itself spans \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\), since otherwise we can consider the Delaunay triangulation in the subspace which is spanned by P. The flat spanned at a point x is the flat (affine subspace) H of largest dimension passing through x, such that the intersection of a neighborhood of x with H is contained in P.
An i-face F of P is a maximal collection of points sharing the same spanning i-flat. Notice that under this definition, faces are relatively open, faces are not necessarily connected, and every point x∈P belongs to a unique face that we denote by F x . The 0-faces are the vertices of P.
We say that a set of points \(\ifmmode {S}\else {\mbox {\(S\)}}\fi \subseteq P\) is a λ-sparse ε-sample of P if and only if it satisfies the following two conditions:
- Density: :
-
Every point x in P is at distance \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) or less to a point in \(\ifmmode {S}\else {\mbox {\(S\)}}\fi \) lying on the closure of F x . In other words,
$$\forall x \in P, \exists s \in S \cap\operatorname{cl}(F_x), \quad\|x-s\| \leq \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi ;$$ - Sparsity: :
-
Every closed d-ball with radius 5dε contains at most λ points of \(\ifmmode {S}\else {\mbox {\(S\)}}\fi \).
The density condition implies that all faces, of all dimensions, are nearly uniformly sampled, not just the faces with maximal dimension. We treat λ as a constant. As \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) goes to zero, the number n of points in a λ-sparse \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \)-sample of a p-dimensional polyhedron is related to \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) by \(n =\varTheta (\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi ^{-p})\), i.e., n tends to infinity (to see this, consider any packing of every face of P by balls of radius ε and then extend this packing to a covering by increasing the radius of each ball to 2ε).
2.2 Main Theorem
We are now ready to state our main result:
Theorem 1
Let S be a λ-sparse ε-sample of a p-dimensional polyhedron P in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\) with n=|S|. In the worst case, the Delaunay triangulation of S has size \(\varTheta (n^{\frac{d-k+1}{p}})\) where \(k = \lceil\frac{d+1}{p+1}\rceil\).
3 The Lower Bound
We begin with the lower bound, which is comparatively simple and conveys the intuition as to why \(\varTheta (n^{\frac{d-k+1}{p}})\) is the correct bound.
Proof of Lower Bound for Theorem 1
We first construct a polyhedron P and then examine the complexity of the Delaunay triangulation of a λ-sparse \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \)-sample on P.
We select a set of d+1 affinely independent points and partition them into groups Q 1,…,Q k so that groups Q 1,…,Q k−1 contain p+1 points each, and Q k contains between 1 and p+1 points. Thus it must be that \(k = \lceil\frac{d+1}{p+1} \rceil\).
Let C i be the convex hull of Q i , and let c i be the dimension of C i . For all 1≤i<k, this dimension c i =p, and c k ≤p. We let the polyhedron \(P= \bigcup_{i=1}^{k} C_{i}\); note that P indeed has dimension p. Also note that each C i spans a subspace independent of the other C j .
Now let us consider a λ-sparse \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \)-sample of P; let us call this point set S. Now consider choosing one sample point from each of the C i for 1≤i≤k, producing a set X. The point set X is linearly independent, since the C i span independent subspaces, so the convex hull of X is a (k−1)-simplex σ.
Also, for any X that we can construct this way by picking one sample point s i on each C i , there is a unique (d−1)-sphere Σ tangent to P at the s i ∈X. To see this, notice that being tangent to C i at s i is roughly speaking equivalent to passing through c i +1 coincident points, and
Σ encloses no sample point of S in its interior, since it is tangent to each of the C i at a single point. Thus σ must be a Delaunay simplex.
Since C i contains \(\varOmega (\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi ^{- c_{i}})\) points of S, the number of distinct Delaunay (k−1)-simplices that we can construct is at least
and this is a lower bound on the overall complexity of the Delaunay triangulation. □
4 The Annular Medial Axis
The annular medial axis \(\mathcal{AM}\) is the key geometric object in our proof of the upper bound. The annular medial axis is formed by tangent annuli rather than tangent spheres. Setting \(k = \lceil\frac{d+1}{p+1} \rceil\), we are particularly interested in \(\mathcal{AM}^{k}\), the part of the annular medial axis generated by at least k faces of P. If the faces of P were in general position, it would be fairly simple to establish that \(\mathcal{AM}^{k}\) had dimension at most d−k+1 everywhere, but when P is degenerate, this is not the case; see Fig. 2. Instead, we identify the subset of \(\mathcal{AM}^{k}\) which is guaranteed to have dimension at most d−k+1.
4.1 Definitions
It is clear what it means for a sphere to be tangent in the interior of an open face F of P; let us introduce a definition which also handles the boundaries. We denote the closure of F by \(\operatorname{cl}(F)\) and write \(\operatorname{Aff}(F)\) for the affine space spanned by F. We say that a (d−1)-sphere Σ is tangent to F at point x if both \(\operatorname{cl}(F)\) and \(\operatorname{Aff}(F)\) intersect Σ in a unique point x. Since faces are relatively open, this means that x might be a limit point of F, so that Σ∩F=∅. Note also that a sphere can be tangent to several faces at x, only one of which is the face F x containing x (the one of smallest dimension).
An annulus with center z, inner radius r, and outer radius R is the set of points x whose distance to the center satisfies r≤∥x−z∥≤R. The boundary of an annulus consists of two (d−1)-spheres, and we call the smaller one the inner sphere and the larger one the outer sphere. We say that an annulus A is tangent to F at x if one of the two spheres bounding A is tangent to F at x (see Fig. 1 or Fig. 6 for a more intricate example). Point x is called a tangency point of A. An annulus is hollow if its inner sphere bounds a d-ball whose interior does not intersect P; notice that P might intersect the annulus itself. The width of an annulus is the difference between the outer and inner radii R−r. We define the penetration of an annulus to be the maximum radius of the intersection of the annulus with a flat, such that the open ball bounded by the inner sphere remains empty; see Fig. 1. Specifically, the penetration is \(\sqrt{R^{2} - r^{2}}\). We are mostly concerned with annuli of penetration \(\ifmmode {\varepsilon }\else {\mbox {\(\varepsilon \)}}\fi \); such an annulus has width \(\frac{\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi ^{2}}{ R+r}\).

A rectangle and its annular 2-medial axis, composed of 16 half-lines, 7 segments, and 8 pieces of hyperbolas. The annulus \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is tangent to the rectangle at the two hollow dots
Definition 2
The annular k-medial axis \(\mathcal{AM}^{k}\) of P is the set of points \(z\in \ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\) for which the largest hollow annulus of penetration \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) centered at z is tangent to at least k faces of P.
We write \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) for the largest hollow annulus of penetration \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) centered at z. Figure 1 pictures an example of the annular 2-medial axis in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{2}\). Observe that this is a superset of the medial axis, even for \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi = 0\): the medial axis of the polyhedron is the set of points \(z \in \ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\) for which A(z,0) touches the polyhedron in two points or more, while the annular 2-medial axis with \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi = 0\) is the set of points z for which A(z,0) is tangent to two faces of P or more (possibly at the same point).
4.2 Dimension and Degeneracy
To describe the annular medial axis, we use the language of stratifications [9, 10]. Given a subset \(X \subseteq \ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\), a stratification of X is a filtration
by subspaces such that the set difference X i ∖X i−1 is an open i-dimensional manifold (possibly not connected), called the i-dimensional stratum S i of X. For example, the Voronoi diagram of a point set in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{2}\) admits a stratification into its cells, edges, and vertices. Semi-algebraic sets admit a stratification, and since the annular k-medial axes of polyhedra are piecewise semi-algebraic, they also admit a stratification. In this section, we give conditions under which a point \(z \in\mathcal{AM}^{k}\) belongs to a stratum of dimension d−k+1 or less.
If the faces of P were in general position, this would be easy: any z belonging to the stratum of dimension d−k+1 would be the center of an annulus tangent to k faces. But in degenerate situations an annulus tangent to k faces might belong to a stratum of dimension greater than d−k+1, as illustrated in Fig. 2. So we need to make a more careful argument.

The box is P, and we take \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi = 0\). The set \(\mathcal{C}^{4} \subset\mathcal{AM}^{4}\), consisting of the centers of annuli tangent to four faces, is the segment connecting the hollow dots. It has dimension one, rather than dimension zero as we would expect in the absence of degeneracy
Recall that \(\mathcal{AM}^{k}\) is defined as the set of points for which \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is tangent to at least k faces. Let us concentrate instead in this section on the subset \(\mathcal{C}^{k}\), defined as the set of points z such that annulus \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is tangent to exactly k faces of P. When does \(\mathcal{C}^{k}\) form a (d−k+1)-dimensional stratum?
We start by writing down some equations that determine \(\mathcal{C}^{k}\) locally around z. Since \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is tangent to exactly k faces F 1,…,F k , there exists δ>0 such that every face of the polyhedron not in {F 1,…,F k } is at distance at least δ to the boundary of \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). Using a compactness argument as in [11], it follows that for a point y close enough to z, the only faces that might possibly be tangent to annulus \(A(y,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) are F 1,…,F k . We set \(e_{i} = -\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi ^{2}\) if F i is tangent to the outer sphere of \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) and e i =0 if F i is tangent to the inner sphere of \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). Since any annulus \(A(y,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) with \(y \in\mathcal {C}^{k}\) in the neighborhood of z is tangent to both F i and F k , \(\mathcal{C}^{k}\) thus obeys the following k−1 equations:
for 0<i<k. The equations expressing the fact that \(A(y,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is tangent to any other pair F i ,F j are redundant. Each g i(y) is a polynomial of degree two, so every neighborhood in \(\mathcal{C}^{k}\) is a subset of the intersection of k−1 quadrics. In general, k−1 hypersurfaces meet at point z in a (d−k+1)-manifold, but this might not hold in the presence of degeneracies.
Lemma 3
Suppose that \(z \in\mathcal{C}^{k}\) is the center of an annulus \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) tangent to the polyhedron at k affinely independent points x 1,…,x k . Then the neighborhood of z in \(\mathcal{C}^{k}\) is a (d−k+1)-manifold. Furthermore, the tangent space to \(\mathcal{C}^{k}\) at z is the set of vectors orthogonal to the affine space spanned by x 1,…,x k .
Proof
In a small neighborhood of z, \(\mathcal{C}^{k}\) coincides with the zero-set of the functions g i(y). Let \(F_{i} = F_{x_{i}}\) be the face to which x i belongs. One can check that the gradient of g i(y) is 2(x k −x i ). Since the x i are affinely independent for 1≤i≤k, we have that the Jacobian of the map g=(g 1(y),…,g k−1(y)) has rank k−1, so the implicit function theorem implies that its zero-set g −1(0) is a (d−k+1)-dimensional manifold in a neighborhood of z. Furthermore, the tangent space of g −1(0) at z is the null space of the derivative Dg(z), which is the set of vectors orthogonal to the affine space spanned by x 1,…,x k . □
While the assumption that the tangency points of \(A(z,\ifmmode {\varepsilon }\else {\mbox {\(\varepsilon \)}}\fi )\) are independent is sufficient to show that z belongs to the stratum of dimension at most d−k+1, this condition is not necessary. Again, this is a phenomenon that occurs only in high dimension. As an example of an annulus \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) for which the tangency points are not independent but the dimension of the stratum containing z remains small, let us consider the following example in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{6}\). The polyhedron P consists of segments of four lines, represented parametrically by (0,0,s,0,0,0), (1,0,0,t,0,0), (0,1,0,0,u,0), and (1,1,0,0,0,v) with −1≤s,t,u,v≤1. Let us take \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi = 0\) and consider the part of \(\mathcal{C}^{4}\) consisting of points z with \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) tangent to the interiors of all four line segments. This is a three-dimensional manifold, as one would expect, and at most points z in this portion of \(\mathcal{AM}^{3}\), the four points of tangency span a three-dimensional subspace. But the point z=(1/2,1/2,0,0,0,0) also belongs to this part of \(\mathcal{C}^{4}\), and its points of tangency all lie in a common 2-flat. Nonetheless, z is a regular point of \(\mathcal{C}^{k}\), and \(\mathcal{C}^{k}\) has dimension three in the neighborhood of z. This example illustrates why we need to consider not just the local points of tangency in the neighborhood of z but also the tangent faces.
Definition 4
We say that k faces F 1,…,F k are independent if none of them is contained in the affine space spanned by the union of the others, that is, for 1≤i≤k,
where the symbol \(\ \widehat{~}\ \) over F i indicates that it is omitted in the union.
For example, the four segments in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{6}\) which we just considered are independent.
Lemma 5
Suppose that \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is tangent to exactly k faces. If those k faces are independent, then \(\mathcal{C}^{k}\) is a manifold of dimension at most d−k+1 in a neighborhood of z.
Proof
Recall that \(\mathcal{C}^{k}\) is the set of points \(z \in \ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\) such that \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is tangent to exactly k faces of P. We partition \(\mathcal{C}^{k}\) into k pieces (some of which might be empty), as follows. We write \(\mathcal{S}_{i}\) for the set of points \(y\in\mathcal{C}^{k}\) whose tangency points span a space of dimension i. Thus we have \(\mathcal{C}^{k} = \bigcup_{i} \mathcal{S}_{i}\) for 0≤i≤k−1. All we need to prove is that in the neighborhood of any \(z \in\mathcal{S}_{i}\), \(\mathcal{S}_{i}\) has dimension at most d−k+1 for all 0≤i≤k−1. By Lemma 3, we already know that \(\mathcal{S}_{k-1}\) is a (d−k+1)-dimensional manifold, so let us consider i<k−1. The idea of this proof is to define \(\mathcal{S}_{i}\), in the neighborhood of z, as the intersection of a family of surfaces and to compute the dimension of the intersection.
Let F 1,…,F k be the k faces tangent to \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). Using the same compactness argument as before, there exists a small neighborhood U of z in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\) such that for every point in \(w \in\mathcal{S}_{i} \cap U\), the only faces possibly tangent to the annulus A(w) are F 1,…,F k .
For \(y \in\mathcal{S}_{i}\cap U\), let x i (y) be the orthogonal projection of y onto \(\operatorname{Aff}(F_{i})\) (see Fig. 3). We can always reduce the size of U so that the tangency points x 1(y),…,x k (y) span an affine space of dimension i; without loss of generality, let us assume that the first i tangency points x 1(y),…,x i (y) are affinely independent. The first surface we construct is the locus of annulus centers tangent just to the faces F 1,…,F i . Specifically, let \(P' = \operatorname{cl}(F_{1}) \cup\cdots\cup \operatorname{cl}(F_{i})\) and write \(\mathcal{S}'\) for the set of points which are the center of a hollow annulus (with respect to P′) of penetration \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) tangent to the i faces F 1,…,F i . By Lemma 3, \(\mathcal{S}'\) is a (d−i+1)-manifold in a neighborhood of y. Clearly \(\mathcal{S}_{i} \subseteq\mathcal{S}'\).

Notation for the proof of Lemma 5. A(y,0) is tangent to F 1, F 2, and F j
Now, for each of the other F j , we construct another surface containing y. For i<j≤k, the point x j (y) is an affine combination of x 1(y),…,x i (y) and therefore belongs to
Since F j ∩X j contains the tangency point x j (y), it is not empty. We define H j as the set of points \(w \in \ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\) such that the nearest point to w on \(\operatorname{Aff}(F_{j})\) lies in \(\operatorname {Aff}(F_{j} \cap X_{j})\), that is, the set of points that, like y, fall into \(\operatorname{Aff}(F_{j} \cap X_{j})\) when projected to \(\operatorname{Aff}(F_{j})\). H j is an affine space, orthogonal to F j , of dimension \(d - \dim{F_{j}} + \ifmmode {\mathrm {dim}}\else {\mbox {\(\mathrm {dim}\)}}\fi (F_{j} \cap X_{j})\).
So all \(y \in\mathcal{C}^{k}\) in the neighborhood of z lie in \(\mathcal{S}' \cap H_{i+1} \cap H_{i+2}\cap\cdots\cap H_{k}\). Let us prove that this intersection has dimension at most d−k+1. In Lemma 3, we observed that the normal space to \(\mathcal{S}'\) at y is spanned by the i−1 vectors v 2=x 1(y)−x i (y),…,v i =x i−1(y)−x i (y). For i+1≤j≤k, we can always find a vector v j in the normal space to H j , by choosing v j in the tangent plane to F j and orthogonal to F j ∩X j . Because the F j are independent faces, the vectors v 2,…,v k are linearly independent, and all belong to the normal space of the intersection \(\mathcal{S}' \cap H_{i+1}\cap H_{i+2} \cap\cdots\cap H_{k}\). It follows that the intersection is a manifold of dimension at most d−k+1 and that \(\mathcal{S}_{i}\) is a stratified space of dimension at most d−k+1. □
We deduce immediately the following corollary:
Corollary 6
Let \(z \in\mathcal{AM}^{k}\) and suppose that \(A(z,\ifmmode {\varepsilon }\else {\mbox {\(\varepsilon \)}}\fi )\) is tangent to j faces amongst which k faces are independent. Then, z lies on a stratum of \(\mathcal{AM}^{k}\) with dimension at most d−k+1.
5 Trimmed Annular Medial Axis
We have established that the subset of \(\mathcal{AM}^{k}\) induced by independent faces has the “right” dimension d−k+1, which is necessary to our plan of counting Delaunay simplices via a packing argument. It may, however, extend to infinity and hence have infinite (d−k+1)-dimensional volume. In this section we define a bounded (d−k+1)-dimensional subset of \(\mathcal{AM}^{k}\), which we call the trimmed annular k-medial axis \(\mathcal{TAM}^{k}\). We end this section by proving that the volume of \(\mathcal{TAM}^{k}\) is bounded by a constant that does not depend on \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \).
We need some definitions. We say that a hyperplane supports \(X \subseteq \ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\) if it has nonempty intersection with the boundary of X and empty intersection with the interior of X.
Definition 7
A point \(z \in\mathcal{AM}^{k}\) and the corresponding annulus \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) are non-essential if there exists a hyperplane supporting the convex hull of P and containing all faces tangent to \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). Otherwise, the point z and the corresponding annulus \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) are essential.
An annulus \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) may be essential because it is tangent to a face F not on the boundary of the convex hull and/or because the union of faces tangent to \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) spans \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\); see Fig. 4. Since we assume that P spans \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\) (Sect. 2.1), the set of essential points is nonempty.

A polyhedron formed of four faces and its annular 2-medial axis, taking \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) to be zero. The set of essential points forms the closed piece of parabola consisting of points equidistant to F 0 and F 3. The two endpoints are essential because the spheres centered at the endpoints are also tangent to F 3
Definition 8
The trimmed annular k-medial axis, \(\mathcal{TAM}^{k}\), is the set of essential points lying on the i-dimensional strata of the annular k-medial axis for i≤d−k+1.
We begin our proof that \(\mathcal{TAM}^{k}\) is bounded and that this bound does not depend on \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) with two simple, and similar, technical lemmas.
Lemma 9
Let A be an annulus tangent to a hyperplane H at point x and whose inner sphere does not enclose point q, with q and the center of A on the same side of H. Let R and r be respectively the outer and inner radii of A. Suppose that there exist two scalars D and h>0 such that d(q,H)≥h, ∥x−q∥≤D, and \(R-r \leq\frac{h}{2}\). Then, the inner radius of A satisfies \(r \leq\frac{D^{2}}{h}\).
Proof
We first consider what happens when the inner sphere of A passes through q and point x lies on the outer sphere of A (see Fig. 5). Let y be the intersection of the inner sphere of A with the segment connecting x to the center z of A. Let c be the midpoint of the segment yq. Since the angle between the two vectors c−z and q−z is equal to the angle between the vector q−y and the hyperplane H, we have
The bound on r follows immediately.

Notation for the proof of Lemma 9
For the case in which x lies on the inner sphere of A, apply the same argument, assuming that r=R and x=y. □
Lemma 10
Let \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) be tangent to two hyperplanes H i ,H j at points x i ,x j such that their normal vectors v i ,v j , pointing toward z, have angle difference ∠(v i ,v j )>α. Let D be the diameter of P. Then the inner radius r of A(z,ε) is at most \(\frac{D}{\sin\alpha/2}\).
Proof
If x i is tangent to the larger sphere of \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\), we let y i be the intersection point of segment x i ,z with the inner sphere; similarly we define y j if x j is tangent to the outer sphere. In any case, we consider the distance D′ between the two points on the inner sphere and note that D′≤D. We have sinα/2=D′/2, so that \(r = d(y_{i},z) \leq\frac{D}{2 \sin{\alpha/2}}\). □
We plan to show that the radius of any essential annulus can be bounded using one or the other of these technical lemmata. Let \(\mathcal{F} = \{F_{i}\}_{i \in I}\) be the set of faces of P tangent to \(A(z, \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). Each F i is tangent to \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) at a point x i , and we define the normal v i to \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) at x i to be the unit vector with direction of z−x i , i.e., v i =(z−x i )/∥z−x i ∥.
We will choose a constant α later; it will depend only on P and not on z or \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \). If there is a pair of normals v i ,v j such that ∠(v i ,v j )>α, we bound the radius of \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) using Lemma 10, with D taken to be the diameter of P. So it only remains to bound the size of an essential annulus, for which every pair of normals differs by at most α, which is done in Lemma 12.
We begin by characterizing an annulus as essential or nonessential using only its set \(\mathcal{F}\) of tangent faces, irrespective of z and \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \). Let \(\ifmmode {\mathbb{S}}\else {\mbox {\(\mathbb{S}\)}}\fi ^{d-1} = \{ v \in \ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d} \mid\|v\|=1 \}\) be the space of direction vectors in \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\). To each face F i of the polyhedron P, we associate the function \(\delta_{F_{i}}: \ifmmode {\mathbb{S}}\else {\mbox {\(\mathbb{S}\)}}\fi ^{d-1} \to \ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi \) which maps every unit vector \(v\in \ifmmode {\mathbb{S}}\else {\mbox {\(\mathbb{S}\)}}\fi ^{d-1}\) to
Roughly speaking, \(\delta_{F_{i}}(v)\) represents the distance between an extreme point in direction v on P and an extreme point in direction −v on the closure of F i . Notice that because F i ⊂P, we have \(\delta_{F_{i}}(v) \geq0\) for all v, since zero is achieved for any x∈F i by choosing q=x. In addition, we have \(\delta_{F_{i}}(v) = 0\) exactly when every point x∈F i is an extreme point of P in direction v, that is, when there is a supporting plane of the convex hull of P containing F i . Finally, we observe that \(\delta_{F_{i}}(v)\) is continuous, and, since it is defined on the compact space \(\ifmmode {\mathbb{S}}\else {\mbox {\(\mathbb{S}\)}}\fi ^{d-1}\), it is uniformly continuous (by the Heine–Cantor theorem).
We now consider any set \(\mathcal{F} = \{F_{i}\}_{i \in I}\) of faces. Let
As the maximum of a set of continuous nonnegative functions, this is again a continuous nonnegative function.
Observation 11
The annulus \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) with tangent face set \(\mathcal{F}\) is nonessential if and only if there exists a unit vector v such that \(\delta_{\mathcal{F}}(v) = 0\).
Proof
We have \(\delta_{\mathcal{F}}(v) = 0\) if and only if \(\delta_{F_{i}}(v)=0\) for all i. This happens when the tangent plane to P in direction v contains all of the \(F_{i} \in\mathcal{F}\). This means, by definition, that \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is nonessential. □
Thus, since \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is essential, we must have \(\delta_{\mathcal{F}}(v) > 0\) for all unit vectors v. Since the map \(\delta_{\mathcal{F}}\) is continuous and defined on a compact set, it attains a global minimum, and this minimum is positive. We define
where v ranges over all unit vectors, and \(\mathcal{F}\) ranges over all subsets of faces such that \(\mathcal{F}\) is not contained in a hyperplane supporting the convex hull of P. We have h>0. We use this constant, dependent on P, in the following lemma.
Lemma 12
There exists a constant α, dependent on the geometry of P but not on \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \), such that for any essential annulus \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) for which every pair v i ,v j of its normal vectors has angle distance ∠(v i ,v j )<α, the distance \(d(z,P) < \frac{D^{2}}{h}\), where D is the diameter of P.
Proof
From the fact that \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is essential, we can conclude that for any of the \(F_{i} \in\mathcal{F}\), there is some v j such that \(\delta_{F_{i}}(v_{j}) > 2h\). If \(\delta_{F_{i}}(v_{i}) > 2h\), we are done, but this is not guaranteed to be the case. So now we use the fact that the lemma assumes that the directions of the v j are all similar. Since \(\delta_{F_{i}}\) is uniformly continuous, we can select an \(\alpha_{F_{i}}\) (again depending on F and not on z or \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \)) such that
We define α=min F α F over all faces F of the polyhedron.
With this choice of α, the fact that \(\delta_{F_{i}}(v_{j}) > 2h\) implies that \(\delta_{F_{i}}(v_{i}) > 2h - h = h\). This in turn implies that there exists a point q∈P such that d(q,H i )≥h, where H i is the hyperplane containing F i with normal v i . So we can apply Lemma 9 to bound the inner radius of \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). □
Combining Lemma 10 and Lemma 12, we conclude that the set of essential points is bounded and at distance at most \(\max\{ \frac{D}{\sin\alpha/2}, \frac{D^{2}}{h} \}\) from P. Let B(P) be the smallest ball containing the set of essential points. The \(\mathcal{TAM}^{k}\) is a stratified set, of dimension at most d−k+1, in B(P). Its i-dimensional stratum for 1≤i≤d−k+1 is the union of pieces of semi-algebraic sets, each of dimension i, formed by the intersection of at least k polynomials, each of degree at most two. The number of such pieces is bounded by a function of P (corresponding to the choices of at least k faces producing the polynomials) that is independent of \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \). Each piece is also trimmed by B(P). The i-dimensional volume of the intersection of a ball of radius R with an algebraic variety of dimension i formed by m polynomials of bounded degree is bounded by a function of i,m, and R (see [5], Lemma 7.4). So the overall i-dimensional volume of the stratum is at most the sum of these trimmed varieties and hence is itself bounded by some function of the geometry of P, independent of \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \).
6 Mapping Delaunay Spheres to \(\mathcal{TAM}^{k}\)
The goal of this section is to assign every Delaunay sphere Σ to some point z on the trimmed annular k-medial axis. We begin with a quick geometric lemma.
Lemma 13
A Delaunay sphere Σ with center z 1 is contained in the annulus \(A(z_{1},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) .
Proof
Let x be a point in P with minimum distance to z 1, and let s be the sample point in \(S \cap\operatorname{cl}(F_{x})\) closest to x. The distance \(\|x-s\| \leq \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \), and therefore \(s \in A(z_{1},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). Because Σ encloses no sample point, \(\varSigma \subseteq A(z_{1},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). □
It is the preceding simple lemma which requires the restrictive sampling requirement that the faces of all dimensions must be sampled; if F x was a subface of some larger-dimensional face F, and not itself sampled, a hollow annulus with center z 1 could contain a large portion of F x , extending far away from the projection x of z 1 onto F x and F. While we could find a sample s on F within distance \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) of x, s would be contained in an annulus of width \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) but not however in the annulus \(A(z_{1},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) of penetration \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) (recall Sect. 4.1).
We use the following incremental construction to associate an annulus, called \(\operatorname {Expansion}(\varSigma )\), with each Delaunay sphere Σ; we will then prove that the center z of \(\operatorname{Expansion}(\varSigma )\) lies in \(\mathcal {TAM}^{k}\) and that Σ∩P is contained in a set that we call the cover of z, the definition of which depends on d,p, and \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \).
Recall that we assume that P spans \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\) (Sect. 2.1) and that p is the dimension of P. Initially, we let z 1 be the center of Σ. The inner sphere B(z 1,r) of the annulus \(A(z_{1},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is tangent to P in at least one point x, contained in a face F 1=F x . At each step j of the construction, we perturb the annulus to find another tangent face, and we increase the dimension of the subspace spanned by {F 1,…,F j } by at least one.
At an arbitrary step of the construction, we have a set {F 1,…,F j } of j faces tangent to \(A(z_{j},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). If the dimension of \(\operatorname{Aff}(\{ F_{1}, \ldots, F_{j} \} ) <d\), we can find a hyperplane H that contains their union \(\bigcup_{i=1}^{j} F_{i}\) (possibly there are many such H; we can pick one arbitrarily). Let L be the line orthogonal to H and containing the current z j . Consider any annulus \(A(y,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) centered on L in the neighborhood of z j . Since \(A(y,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) also has penetration \(\ifmmode {\varepsilon }\else {\mbox {\(\varepsilon \)}}\fi \), its intersection \(A(y,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\cap H = A(z_{j},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi ) \cap H\), and \(A(y,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) remains tangent to F 1,…,F j . Consider the y, nearest to z j , such that \(A(y,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is tangent to an additional face F j+1, not contained in H. Such a y must exist, since P spans \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\). We set z j+1=y.
When there is a set of faces F 1,…,F j tangent to \(A(z_{j},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) that spans \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\), we stop. Clearly this occurs after at most d steps. We associate Σ with the final annulus: define \(\operatorname {Expansion}(\varSigma ) =A(z_{j},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) for the final z j .
Lemma 14
For every Delaunay sphere Σ, the center z of the annulus \(\operatorname{Expansion}(\varSigma )\) belongs to the trimmed annular k-medial axis \(\mathcal{TAM}^{k}\).
Proof
Since we know that there is a set of faces {F 1,…,F j } tangent to \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )= \operatorname{Expansion}(\varSigma )\) that span \(\ifmmode {\mathbb{R}}\else {\mbox {\(\mathbb{R}\)}}\fi ^{d}\), we know that they cannot all be contained in a hyperplane supporting the convex hull, and this implies that z is essential. The crux of the proof is showing that \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is tangent to at least k independent faces. This will establish that z belongs to the (d−k+1)-dimensional stratum of \(\mathcal{AM}^{k}\) and hence to \(\mathcal{TAM}^{k}\).
Initially, since any single face is independent, the set {F 1} is independent. The dimension of \(\operatorname{Aff}(\{ F_{1} ,\ldots, F_{j+1} \})\) is at least one greater than the dimension of \(\operatorname{Aff}(\{ F_{1} ,\ldots, F_{j} \})\), since \(\operatorname {Aff}(\{F_{1} ,\ldots,F_{j}\})\subset H\), and F j+1 is not contained in H. This also implies that at each step, F j+1 is independent of F 1,…,F j . However, it is possible that some F i in {F 1,…,F j } may be spanned by some subset of {F 1,…,F j+1}, for instance, if F i ⊆F j+1. Any such F i can be removed, with \(\operatorname{Aff}(\{ F_{1} ,\ldots , F_{j+1} \}- \{F_{i}\}) =\operatorname{Aff}(\{ F_{1} ,\ldots, F_{j+1} \})\). Let \(\mathcal{F}\) be the remaining set of independent faces.
We claim that at the end of the construction, there are at least k independent faces in \(\mathcal{F}\) for \(k = \lceil\frac{d+1}{p+1}\rceil\). Consider adding each F i to the \(\mathcal{F}\) in turn. Each face has dimension at most p, so that adding F i increases the dimension of the union ⋃{F 1,…,F i−1} by at most p+1 (adding to the subspace basis a vector from the previous subspace \(\operatorname{Aff}(\{F_{1} ,\ldots, F_{i-1}\})\) to some point in F i and then a set of at most p vectors spanning F i ). So the number of independent faces required to span all of d-dimensional space is at least \(k = \lceil\frac{d+1}{p+1} \rceil\).
This establishes that the final \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) is tangent to at least k independent faces. □
7 Covering Delaunay Simplices
Now we would like to relate the intersection \(\operatorname {Expansion}(\varSigma ) \cap P\) back to the original Delaunay sphere Σ. We do this by defining the cover of a point z (roughly its region of influence on P) and then showing that the intersection Σ∩P is contained in the cover of the annulus \(\operatorname {Expansion}(\varSigma )\) centered at a point \(z \in\mathcal{TAM}^{k}\).
So let us begin by defining the cover of a point z. Write π x (z) for the orthogonal projection of z onto the flat supporting the face F x containing x in P and let Π(z)={π x (z)∣x∈P} be the set of orthogonal projections of z onto the flats supporting all faces of P. For any nonnegative number w, called the radius of the cover, we define the w-cover as a union of balls:
We say that x is an anchor point of z if \(x \in A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) and π x (z)=x. Thus, anchor points of z form a subset of Π(z) that contains the tangency points of the annulus with the polyhedron and possibly other points of \(P\cap A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). Now we establish that any point in \(P\cap A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) must be close to an anchor point of z.
Lemma 15
For every point \(x \in P\cap A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\), there exists an anchor point y of z in the closure of F x such that
Proof
The proof is by induction over the dimension d x =dimF x of the face F x containing x. If d x =0, the result holds for y=x. Suppose that d x >0 and let q=π x (z) be the orthogonal projection of z onto \(\operatorname{Aff}(F_{x})\). We distinguish two cases: (1) if q∈F x , the segment xq lies inside \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\), and therefore \(\|x-q\| \leq \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \); and the result holds for y=q. (2) If \(q \not\in F_{x}\), we consider the point y∈P on the segment xq, which is closest to x on the boundary of F x (as in Fig. 6). Since the segment xy is contained in \(A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\), this implies \(\| x - y \| \leq \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \). Furthermore, since y belongs to the boundary of F x , the dimension d y <d x . We apply our induction hypothesis: \(\operatorname{cl}(F_{y})\) contains an anchor point w of z with \(\|y - w\| \leq(\dim{F_{y}} - \dim{F_{w}} + 1) \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \), so \(\|x - w\| \leq \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi + (\dim{F_{y}} - \dim{F_{w}} + 1) \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \), which gives the result.

Notation for the proof of Lemma 15. The annulus is tangent to the four faces F 0, F 1, F 2, and F 3
□
The preceding lemma shows that any point in \(P\cap A(z,\ifmmode {\varepsilon }\else {\mbox {\(\varepsilon \)}}\fi )\) is at distance at most \((p+1)\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) to an anchor point of z. Thus, \(P \cap A(z,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi ) \subseteq\operatorname{Cover}(z,(p+1)\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). From there, we show how to cover a Delaunay sphere using an annulus centered on the trimmed medial axis.
Lemma 16
For every Delaunay sphere Σ, we have \(\varSigma \cap P\subseteq\operatorname{Cover}(z,4d\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) where z is the center of \(\operatorname{Expansion}(\varSigma )\).
Proof
Again, this follows from the construction of \(A(z_{j},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi ) =\operatorname{Expansion}(\varSigma )\). Initially, z 1 is the center of Σ. By Lemma 13, \(\varSigma \cap P\subset A(z_{1},\ifmmode {\varepsilon }\else {\mbox {\(\varepsilon \)}}\fi )\), and by Lemma 15, this implies that for every point x 0∈Σ∩P, there exists an anchor point x 1 of z such that \(\|x_{0} - x_{1} \| \leq(\dim F_{x_{0}} - \dim F_{x_{1}} +1 )\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \). In particular, \(\varSigma \cap P\subseteq \operatorname{Cover}(z_{1},(p+1)\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). Now we need to show that as we proceed from z i to z i+1, Σ∩P remains covered for 1≤i<j. So we construct a sequence of j points x 1, x 2, …, x j such that x i+1 is an anchor point of z i+1 and
for all 1≤i<j. For simplicity, we write \(F_{i} = F_{x_{i}}\) and d i =dimF i . Let H be the hyperplane used during the construction of z i+1 and which contains the union \(\bigcup_{l=1}^{i} F_{l}\). Let H + be the closed half-space bounded by H in the direction z i+1−z i , with H − being the open half space on the other side. We consider two cases:
-
1.
The original anchor point x i ∈H +, including the case in which x i ∈H. Let R i be the outer radius of \(A(z_{i},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). The intersection H +∩B(z i ,R i )⊆H +∩B(z i+1,R i+1), and x i is of course outside both inner balls, so x i remains in the annulus \(A(z_{i+1},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). It may no longer be an anchor point of z i+1, but by Lemma 15, there exists an anchor point x i+1 of z i+1 on the closure of F i such that \(\|x_{i}-x_{i+1}\| \leq( d_{i} - d_{i+1} + 1) \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \).
-
2.
The case in which x i ∈H − is illustrated in Fig. 7. Let us begin by considering the intersections \(D = \operatorname {Aff}(F_{i}) \cap A(z_{i},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) and \(D'= \operatorname{Aff}(F_{i}) \cap A(z_{i+1},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\). Since x i is an anchor point contained in \(A(z_{i},\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\), the intersection D is a d i -dimensional ball of radius at most \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \), with center x i . The annulus is shrinking on this side of H, implying D′∩H −⊆D∩H −. It is not possible for \(D' \cap\operatorname{cl}(F_{i})\) to be empty, since that would require there has been some last point at which the annulus \(A(y,\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\), with y on the segment connecting z i and z i+1, was in contact with \(\operatorname{cl}(F_{i})\), contradicting the choice of z i+1 as the annulus with the first new tangent point. Since \(D' \cap\operatorname{cl}(F_{i})\) is nonempty, it must contain some point p, and by Lemma 15, there exists an anchor point x i+1 of z i+1 on the closure of F i such that \(\|p - x_{i+1}\| \leq(d_{i} - d_{i+1} + 1) \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \). Since p∈D′⊆D and D is a ball centered at x i with radius at most \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \), we have \(\|x_{i} - p \| \leq \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \). The triangle inequality then gives us inequality (2).
Fig. 7 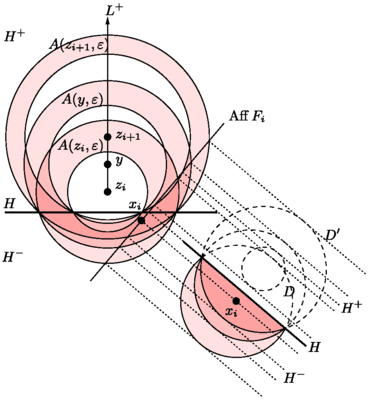
On the upper left, three annuli centered at z i , y, and z i+1 that share the same intersection with a hyperplane H. On the lower right, intersection of the three annuli with the tangent space passing through x i . The restriction of those intersections to H − are nested

To summarize, for every point x 0∈Σ∩P, we have constructed a sequence of points x 1, x 2, …, x j such that x i is an anchor point of z i for all 1≤i≤j, \(\|x_{0}-x_{1}\| \leq(d_{0} - d_{1} + 1)\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \), and \(\|x_{i}-x_{i-1}\| \leq (d_{i} - d_{i-1} + 2)\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \). Thus, \(\|x_{0}-x_{j}\| \leq (d_{0} - d_{j} +1 + 2(j-1)) \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \). Since the number of steps in the construction is bounded by d, i.e., j−1≤d, we get \(\|x_{0} - x_{j}\| \leq (3d+1)\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \), yielding the result. □
8 Size of Delaunay Triangulation
To establish the upper bound on the number of Delaunay simplices, it remains only to combine what we know about the size of \(\mathcal{TAM}^{k}\) with our method of mapping Delaunay simplices to \(\mathcal{TAM}^{k}\).
We first consider a sample M of the trimmed annular k-medial axis \(\mathcal{TAM}^{k}\), such that every point \(x \in\mathcal{TAM}^{k}\) has a sample within distance \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \) and such that the number of samples in a ball of radius \(O(\ifmmode {\varepsilon }\else {\mbox {\(\varepsilon \)}}\fi )\) centered at x is at most λ (unlike our original sample S of P, it is not necessary to sample the lower-dimensional strata of \(\mathcal{TAM}^{k}\)). The size m=|M| is \(O(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi ^{-(d-k+1)})\) with \(k =\lceil\frac {d+1}{p+1} \rceil\). This follows from the fact that the dimension of \(\mathcal{TAM}^{k}\) is d−k+1 and from the results in Sect. 5, which established that the volume of \(\mathcal{TAM}^{k}\) is bounded by a constant that does not depend on \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \).
Next, we map each Delaunay simplex \(\sigma\in\operatorname {Del}({S})\) to a point z∈M. Consider the Delaunay sphere Σ passing through the vertices of σ. Lemma 14 and Lemma 16 tell us that the Delaunay sphere Σ associated with σ belongs to \(\operatorname{Cover}(z,4d\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi )\) for some point \(z \in \mathcal{TAM}^{k}\), where z is an arbitrary point not belonging to M. But there must be some z′∈M at distance at most \(\ifmmode {\varepsilon }\else {\mbox {\(\varepsilon \)}}\fi \) from z.
Lemma 17
For every pair of points z and z′ with \(\|z-z'\| \leq \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \),
Proof
Recalling that π x (z) is the orthogonal projection of z onto the tangent plane to P at x, we have \(\|\pi_{x}(z) -\pi_{x}(z')\| \leq\|z-z'\| \leq \ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \). The claim follows immediately. □
Using Lemma 17 and Lemma 16, we get that for d≥1, there exists a point z′∈M such that
The cover of z′ is a union of d-balls, each with radius \(5d\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \), at most one for each face of the polyhedron, and therefore it contains a constant number of points of S. So the number of simplices that we can form by picking points in the cover of z′ is also a constant. This means that only a constant number of Delaunay simplices can be charged to each point z′∈M and that the size of the Delaunay triangulation is proportional to the size m of M.
Recall that the number of points in a λ-sparse \(\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi \)-sample S of a p-dimensional polyhedron P is n=Θ(ϵ −p) and that the i-faces of P have Θ(ε −i) points of S. Using \(n = \varOmega (\ifmmode {\varepsilon}\else {\mbox {\(\varepsilon\)}}\fi ^{-p})\), we get that the number of Delaunay simplices is
where \(k = \lceil\frac{d+1}{p+1} \rceil\).
9 Conclusion
This paper answers only the first of many possible questions about the complexity of the Delaunay triangulations of points distributed nearly uniformly on manifolds. It would be interesting to establish a bound which does not require all faces of P to be sampled. Similar bounds for smooth surfaces rather than polyhedra would be of more practical interest. The proof in this paper seems to rely critically on some properties specific to polyhedra, particularly that sample points on k faces are needed to form a simplex, so other techniques will be needed for the cases of more general manifolds of dimension 1<p<d.
Notes
More formally, a p-dimensional polyhedron can be defined as the underlying space of any geometric simplicial complex of dimension p.
References
Amenta, N., Attali, D., Devillers, O.: Complexity of Delaunay triangulation for points on lower-dimensional polyhedra. In: Proc. ACM-SIAM Sympos. Discrete Algorithms (SODA), New-Orleans, Louisiana, USA, 7–9 January 2007
Attali, D., Boissonnat, J.-D.: A linear bound on the complexity of the Delaunay triangulation of points on polyhedral surfaces. Discrete Comput. Geom. 31(3), 369–384 (2004)
Attali, D., Boissonnat, J.-D., Lieutier, A.: Complexity of the Delaunay triangulation of points on surfaces: the smooth case. In: Proc. of the 19th ACM Symposium on Computational Geometry, pp. 201–210 (2003)
Cheng, S.-W., Dey, T.K., Levine, J.A.: A practical Delaunay meshing algorithm for a large class of domains. In: Proceedings of the 16th International Meshing Roundtable, pp. 477–494 (2007)
Demmel, J.W.: The probability that a numerical analysis problem is difficult. Math. Comput. 50(182), 449–480 (1988)
Erickson, J.: Nice point sets can have nasty Delaunay triangulations. Discrete Comput. Geom. 30, 109–132 (2003)
Golin, M.J., Na, H.-S.: The probabilistic complexity of the Voronoi diagram of points on a polyhedron. In: Proc. 14th Annu. ACM Sympos. Comput. Geom., pp. 209–216 (2002)
Golin, M.J., Na, H.-S.: On the average complexity of 3d-Voronoi diagrams of random points on convex polytopes. Comput. Geom. 25, 197–231 (2003)
Goresky, M., MacPherson, R.: Stratified Morse Theory. Results in Mathematics and Related Areas (3), vol. 14. Springer, Berlin (1988)
Gunnells: Stratified spaces twigs. TWIGS talks. http://www.math.umass.edu/%7Egunnells/talks/singspc.pdf
Lieutier, A.: Any open bounded subset of R n has the same homotopy type as its medial axis. Comput. Aided Des. 36, 1029–1046 (2004)
McMullen, P.: The maximum number of faces of a convex polytope. Mathematika 17, 179–184 (1970)
Acknowledgements
We dedicate this paper to the late Hazel Everett. We thank Hazel, Sue Whitesides, and Sylvain Lazard for inviting us to their 2006 Bellairs Workshop on Computational Geometry, where we first started to work on this problem. We gratefully acknowledge André Lieutier for helpful suggestions, and the insights and suggestions of our patient anonymous reviewers.
N. Amenta supported by NSF grants CCF–0093378, CCF–0331736 and CCF–0635250.
D. Attali supported by ANR Project GIGA ANR-09-BLAN-0331-01.
O. Devillers supported by the EU under STREP contract FET-255827 (CGLearning).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Tetsuo Asano.
Rights and permissions
About this article
Cite this article
Amenta, N., Attali, D. & Devillers, O. A Tight Bound for the Delaunay Triangulation of Points on a Polyhedron. Discrete Comput Geom 48, 19–38 (2012). https://doi.org/10.1007/s00454-012-9415-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00454-012-9415-7