
Abstract
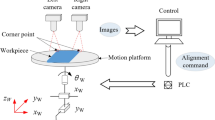
Industrial robots are increasingly applied in the automatic die repair welding via the prevalent wire and arc additive manufacturing (WAAM) technology. However, the precise calibration of work coordinates is indispensable for the off-line programming of robotic welding paths, which often results in positioning error, path deviation, or even tool collisions. The die is pre-heated at about 500 °C before the robotic WAAM processes. Thus, it is challenging to calibrate work coordinates by touch sensing because those points on the X-axis and the Y-axis to determine the location of the part need to be caught by human eyes. In this paper, a camera vision calibration (CVC) method based on stereo vision is developed. Image feature points are extracted by a multi-saliency fusion algorithm based on the human visual attention mechanism. Through stereo vision, 3D information of the feature points is obtained, and the workpiece coordinate system (WCS) is finely calibrated. Compared with the random error of human vision calibration (HVC), the proposed method could improve the workpiece’s calibration accuracy, reduce the unexpected collisions in limited space, and improve the dimensional precision of the welding layer.












Similar content being viewed by others
Data availability
The datasets used or analyzed during the current study are available from the corresponding author on reasonable request.
References
Chander S, Chawla V (2017) Failure of hot forging dies –an updated perspective. Mater Today Proc 4:1147–1157. https://doi.org/10.1016/j.matpr.2017.01.131
Hawryluk M, Zwierzchowski M, Marciniak M, Sadowski P (2017) Phenomena and degradation mechanisms in the surface layer of die inserts used in the hot forging processes. Eng Fail Anal 79:313–329. https://doi.org/10.1016/j.engfailanal.2017.04.036
Rodrigues T, Duarte V, Miranda RM, Santos TG, Oliveira JP (2019) Current status and perspectives on wire and arc additive manufacturing (WAAM). Materials 12:1121. https://doi.org/10.3390/ma12071121
Hassen AA, Noakes M, Nandwana P, Kim S, Kunc V, Vaidya U, Love L, Nycz A (2020) Scaling up metal additive manufacturing process to fabricate molds for composite manufacturing. Addit Manuf 32:101093. https://doi.org/10.1016/j.addma.2020.101093
Hu Z, Qin X, Shao T (2017) Welding thermal simulation and metallurgical characteristics analysis in WAAM for 5CrNiMo hot forging die remanufacturing. Procedia Eng 207:2203–2208. https://doi.org/10.1016/j.proeng.2017.10.982
Zhang J, Zhou J, Wang Q, Xiao G, Quan G (2020) Process planning of automatic wire arc additive remanufacturing for hot forging die. Int J Adv Manuf Technol 109:1613–1623. https://doi.org/10.1007/s00170-020-05766-0
Srinivasan H, Harrysson OLA, Wysk RA (2015) Automatic part localization in a CNC machine coordinate system by means of 3D scans. Int J Adv Manuf Technol 81:1127–1138. https://doi.org/10.1007/s00170-015-7178-z
Zhang W, Ma X, Cui L, Chen Q (2008) 3 points calibration method of part coordinates for arc welding robot. In: Xiong C, Huang Y, Xiong Y, Liu H (eds) Intelligent robotics and applications. ICIRA 2008. Lecture Notes in Computer Science, vol 5314. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-88513-9_24
Pessoles X, Landon Y, Segonds S, Rubio W (2013) Optimisation of workpiece setup for continuous five-axis milling: application to a five-axis BC type machining centre. Int J Adv Manuf Technol 65:67–79. https://doi.org/10.1007/s00170-012-4151-y
Liu SC, Hao J, Lu ZX, Zhang, MC, Zhao J (2016). A calibration method of workpiece frames for ultrasonic testing using twin-robot. In 2016 IEEE Far East NDT New Technology & Application Forum (FENDT). pp 66–70. https://doi.org/10.1109/FENDT.2016.7991997
Blank S, Shen Y, Xi N, Zhang C, Wejinya UC (2007) High precision PSD guided robot localization: design, mapping, and position control. In: In 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 52–57. https://doi.org/10.1109/IROS.2007.4399621
Pérez L, Rodríguez Í, Rodríguez N, Usamentiaga R, García DF (2016) Robot guidance using machine vision techniques in industrial environments: a comparative review. Sensors 16:335. https://doi.org/10.3390/s16030335
Jian C, Gao J, Ao Y (2017) Automatic surface defect detection for mobile phone screen glass based on machine vision. Appl Soft Comput 52:348–358. https://doi.org/10.1016/j.asoc.2016.10.030
Deng L, Du H, Han Z (2017) A carrot sorting system using machine vision technique. Appl Eng Agric 33:149–156. https://doi.org/10.13031/aea.11549
Ajdadi FR, Gilandeh YA, Mollazade K, Hasanzadeh RP (2016) Application of machine vision for classification of soil aggregate size. Soil Tillage Res 162:8–17. https://doi.org/10.1016/j.still.2016.04.012
Williams HAM, Jones MH, Nejati M, Seabright MJ, Bell J, Penhall ND, Barnett JJ, Duke MD, Scarfe AJ, Ahn HS, Lim JY, MacDonald BA (2019) Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and robotic arms. Biosyst Eng 181:140–156. https://doi.org/10.1016/j.biosystemseng.2019.03.007
Ahmad R, Tichadou S, Hascoet JY (2010) Integration of vision based image processing for multi-axis CNC machine tool safe and efficient trajectory generation and collision avoidance. J Mach Eng 10:53–65
Vakanski A, Janabi-Sharifi F, Mantegh I (2017) An image-based trajectory planning approach for robust robot programming by demonstration. Robot Auton Syst 98:241–257. https://doi.org/10.1016/j.robot.2017.09.012
Zhang X, Tian X, Yamazaki K (2010) On-machine 3D vision system for machining setup modeling. Int J Adv Manuf Technol 48:251–265. https://doi.org/10.1007/s00170-009-2269-3
Tian X, Deng H, Yamazaki K, Fujishima M, Mori M (2005). On-machine visual modeling system with object recognition. In ASME International Mechanical Engineering Congress and Exposition, pp 123–133. https://doi.org/10.1115/IMECE2005-81661
Micali MK, Cashdollar HM, Gima ZT, Westwood MT. (2016) One touch workpiece verification system for CNC machining using a low-cost computer vision approach. In: Proceedings of the ASME 11th International Manufacturing Science and Engineering Conference 2016. The American Society of Mechanical Engineers 3: V003T08A021. https://doi.org/10.1115/MSEC2016-8725
de Araujo PRM, Lins RG (2020) Computer vision system for workpiece referencing in three-axis machining centers. Int J Adv Manuf Technol 106:2007–2020. https://doi.org/10.1007/s00170-019-04626-w
Bedaka AK, Vidal J, Lin CY (2019) Automatic robot path integration using three-dimensional vision and offline programming. Int J Adv Manuf Technol 102:1935–1950. https://doi.org/10.1007/s00170-018-03282-w
Ngom M, Nagata F (2014) Detection of workpieces on a CNC machining table for measurement and automatic tool positioning. 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014), Seoul, 2014, pp. 55-58. https://doi.org/10.1109/ICCAS.2014.6987958
Ngom M, Nagata F (2013) Basic design of a computer vision based controller for desktop NC engraving machine. In: IEEE International Conference on Mechatronics and Automation (ICMA), 2013. IEEE, Piscataway, NJ, pp 1293–1298. https://doi.org/10.1109/ICMA.2013.6618100
Gomes RB, da Silva BMF, de Medeiros Rocha LK, Aroca RV, Velho LCPR, Gonçalves LMG (2013) Efficient 3D object recognition using foveated point clouds. Comput Graph 37: 496–508. https://doi.org/10.1016/j.cag.2013.03.005
Okarma K, Grudziński M (2012) The 3D scanning system for the machine vision based positioning of workpieces on the CNC machine tools. In: 2012 17th International Conference on Methods Models in Automation Robotics (MMAR), pp 85–90. https://doi.org/10.1109/MMAR.2012.6347906
Westoby MJ, Brasington J, Glasser NF, Hambrey MJ, Reynolds JM (2012) ‘Structure-from-motion’ photogrammetry: a low-cost, effective tool for geoscience applications. Geomorphology 179:300–314. https://doi.org/10.1016/j.geomorph.2012.08.021
Nurutdinova I, Fitzgibbon A (2015) Towards pointless structure from motion: 3D reconstruction and camera parameters from general 3D curves. In: 2015 IEEE International Conference on Computer Vision (ICCV), pp 2363–2371. 10.1109/ICCV.2015.272
Achanta R, Hemami S, Estrada F, Susstrunk S (2009) Frequency-tuned salient region detection. In: 2009 IEEE Conference on Computer Vision and Pattern Recognition, pp 1597–1604. https://doi.org/10.1109/CVPR.2009.5206596
Hou X, Zhang L (2007) Saliency detection: a spectral residual approach. In: 2007 IEEE Conference on Computer Vision and Pattern Recognition, pp 1–8. https://doi.org/10.1109/CVPR.2007.383267
Gonzalez RC, Woods RE (2018) Digital image processing (4th). Pearson, New York
Zhang Z (2000) A flexible new technique for camera calibration. IEEE Trans Pattern Anal Mach Intell 22:1330–1334. https://doi.org/10.1109/34.888718
Tian X, Zhang X, Yamazaki K, Hansel A (2010) A study on three-dimensional vision system for machining setup verification. Robot Comput Integr Manuf 26:46–55. https://doi.org/10.1016/j.rcim.2009.02.002
Funding
This study was funded by the Hubei Province Technology Innovation Project (No. 2018AAA021).
Author information
Authors and Affiliations
Contributions
Xunpeng Qin contributed to the conception of the study; Qiang Wu designed the study and contributed to analysis and manuscript preparation; Yifeng Li and Zeqi Hu contributed to the data analysis; Congming Liang provided the experimental platform; and both authors contributed equally to the writing of the paper.
Corresponding author
Ethics declarations
Ethical approval
The authors declare that they have no conflict of interest. All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards. This article does not contain any studies with animals performed by any of the authors. Informed consent was obtained from all individual participants included in the study.
Consent to participate
Written informed consent was obtained for each participant according to institutional guidelines.
Consent to publish
Written informed consent for publication was obtained from all participants.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wu, Q., Qin, X., Li, Y. et al. Automatic calibration of work coordinates for robotic wire and arc additive re-manufacturing with a single camera. Int J Adv Manuf Technol 114, 2577–2589 (2021). https://doi.org/10.1007/s00170-021-06664-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-021-06664-9