
Abstract
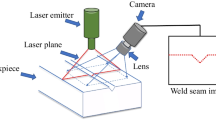
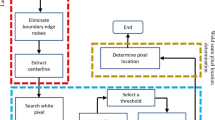
This paper presents a weld seam tracking system using cross mark structured light. The hardware of the proposed system consists of a two degrees of freedom (DOF) welding robot, a camera with cross mark structured light, and two computers. The system has two parts namely visual sensing and motion control. In the visual sensing part, the cross mark of the structured light is utilized to set a region of interest (ROI). In the ROI, an adapted line fitting algorithm is employed to estimate the lines. Then, intersections of the lines are computed and used as the pin points for templates creating. During the matching process, a modified template matching is used to detect the edges of V-groove weld seam. By using this technique, a huge computational cost in image processing can be reduced, and therefore the tracking can be made in real time. The position based visual servoing with proportional-derivative(PD) and velocity feedback controller is designed for seam tracking. The experimental results show that the proposed method performs the real-time tracking efficiently with sufficient accuracy.
Similar content being viewed by others

References
Cook GE (1983) Robotic arc welding: research in sensoryfeedback control. IEEE Trans Ind Electron 30 (3):252–268
Bolmsjo G, Olsson M, Cederberg P (2001) Robotic arc welding: trends and developments for higher autonomy Devision of robots. Department of mechanical Engineering, Lund University
Kiddee P, Fang ZJ, Tan M (2015) A Simple Technique for Structured Light Calibration in Welding Robots. In: Proceedings IEEE International Conference on Robotic and Biomimetics(ROBIO), pp 596–601
Hutchinson S, Hager GD, Corke P (1996) A tutorial on visual servo control. IEEE Trans Robot Autom 12(5):651– 670
Zhang WZ, Chen Q, Zhang G, Sun ZG, Du D (2007) Seam tracking of arcticulated robot for laser welding based on visual feedback control. Robot Weld Intellige & Automation LNCIS 362:281–287
Fang ZJ, Xu D, Tan M (2010) Visual seam tracking system for butt weld of thin plate. Int J Adv Manuf Technol 49(5):519– 526
Nele L, Sarno F, Keshari A (2013) An image acquisition system for real-time seam tracking. Int J Adv Manuf Technol 69(9):2099–2110
Luo H, Chen XQ (2005) Laser visual sensing for seam tracking in robot arc welding of titanium alloys. Int J Adv Manuf Technol 26(9):1012–1017
Shen HY, Wu J, Lin T, Chen SB (2008) Arc welding robot system with seam tracking and weld pool control based on passive vision. Int J Adv Manuf Technol 39(7):669–678
Sicard P, Levine MD (1989) Joint recognition and tracking for robotic arc welding. IEEE Trans on SMC 19(4):714–720
Li LY, Fu L, Zhou X, Li X (2007) Image processing of seam tracking system using laser vision. Robot Weld Intellige & Automation LNCIS 362:319–324
Long X, Lili X, Yong Z (2010) A method of seam tracking based on passive vision. Robot Weld Intellige & Automation LNEE 88:131–138
Yan ZG, Xu D, Li Y, Tan M (2007) A vision-based seam tracking system for submerged arc welding. Intellige & Automation LNCIS 362:349–357
Shen HY, Lin T, Chen SB (2007) A study on vision-based real-time seam tracking in robotic arc welding. Robot Weld Intellige & Automation LNCIS 362:311–318
Xu PQ, Xu GX, Tang XH, Yao S (2008) A visual seam tracking system for robotic arc welding. Int J Adv Manuf Technol 37(1):70–75
Xu YL, Fang G, Chen SB, Zou JJ, Ye Z (2014) Real-time image processing for vision-based weld seam tracking in robotic GMAW. Int J Adv Manuf Technol 73(9):1413– 1425
Gu WP, Xiong ZY, Wan W (2013) Autonomous seam acquisition and tracking system for multi-pass welding based on vision sensor. Int J Adv Manuf Technol 69(1):451–460
Chen SB (2007) On key technology of intelligentized welding robot. Intellige & Automation LNCIS 362:105–115
Chen XZ, Chen SB, Lin T, Lei YC (2006) Practical method to locate the initial position of weld seam using visual technology. Int J Adv Manuf Technol 30(7):663–668
Chen XZ, Chen SB (2010) The autonomous detection and guiding of start welding position for arc welding robot. Int J Ind Robot 37(1):70–78
Chen XZ, Huang YM, Chen SB (2012) Model analysis and experimental technique on computing accuracy of seam spatial position information based on stereo vision for welding robot. Int J Ind Robot 39(4):349–356
Wang XJ, Shi YH, Yu GQ, Liang B, Li Y (2016) Groove-center detection in gas metal arc welding using a template-matching method. Int J Adv Manuf Technol:1–11
AWS D14.1/D14.1M:2005 Specification for welding of industrial and mill cranes and other material handling equipment
ISO 9692-1:2013: Welding and allied processes–Types of joint preparation–Part 1: Manual metal arc welding, gas-shielded metal arc welding, gas welding, TIG welding and beam welding of steels
Gonzalez RC, Woods RE (2002) Digital image processing. Pearson Education Asia Limited and Publishing House of Electronics, Beijing, pp 701–704
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Kiddee, P., Fang, Z. & Tan, M. An automated weld seam tracking system for thick plate using cross mark structured light. Int J Adv Manuf Technol 87, 3589–3603 (2016). https://doi.org/10.1007/s00170-016-8729-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-016-8729-7