
Abstract
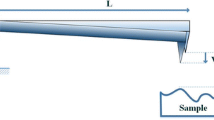
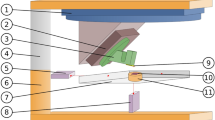
In this paper, maximum load-carrying capacity algorithm is developed for atomic force microscope (AFM) nanorobot. Considering real-time control limitation for micro nano manufacture process, predicting possibility of this manufacture process is really important. Main limitation in this method is cantilever’s geometry. Finite element method is used for finding effect of variation in geometry parameters. Cantilever’s twist angle has a relationship with cantilever geometry; we use this point as a criterion for finding maximum load-carrying capacity. Changing in this parameter can be realized by optic sensor that is used in AFM nanorobot. Finite element result is used for modeling geometrical effect. Finally, an algorithm to determine maximum load-carrying capacity with considering finite element result and for different cantilever geometries is presented; thus, with using these simulations, particle size can be estimated.
Similar content being viewed by others
References
Sitti M (2001) Survey of Nanomanipulation Systems. IEEE Nanotechnology Conference
Stroscio JA, Eigler DM (1996) Atomic and molecular manipulation with the scanning tunneling microscope. Science 254:1322–1326
Junno T, Deppert K, Montelius L (1995) Controlled manipulation of nanoparticles with an atomic force microscope. Appl Phys Lett 66:3627–3629 doi:10.1063/1.113809
Schaefer DM, Reifenberger R (1995) Fabrication of two-dimensional of nanometer—size clusters with the atomic force microscope. Appl Phys Lett 66:1012–1014 doi:10.1063/1.113589
Falvo MR, Clary G, Hesler A, Paulson S (1999) Nanomanipulation experiments exploring friction and mechanical properties of carbon nano tube. Microsc Microanal 4:504–512
Guthold M, Falvo MR, Mathhews WG, Paulson S 2000, Controlled manipulation of molecular samples with the nano-manipulation. IEEE/ASME Trans. on Mechatronics, 189–198
Sitti M, Hashimoti H 2000, Controlled pushing of nanoparticles: modeling and experiments. IEEE/ASME Trans.on Mechatronics, 199–211
Tafazzoli A, Sitti M (2004) Dynamic behavior and simulation of nanoparticle sliding during nanoprobe based positioning, ASME International Mechanical Engineering Congress
Tafazzoli A, Sitti M (2004) Dynamic modes of nanoparticle motion during nano probe based manipulation, Proc. of IMECE’04
Tafazzoli A July (2005) Atomic force microscope based two-dimensional assembly of micro/nano-particles, Proc. of the 6th IEEE International Symposium on Assembly and Task Planning
Bathe KJ (1996) Finite element procedures in engineering analysis. Prentice-Hall, Upper Saddle River
Shigley JE (1986) Mechanical engineering design. McGraw Hill, Columbus, pp 220–225
Stark B (1999) MEMS reliability assurance guidelines for space applications. JPL Publ 99:49–55
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Korayem, M.H., Hoshiar, A.K. & Ebrahimi, N. Maximum allowable load of atomic force microscope (AFM) nanorobot. Int J Adv Manuf Technol 43, 690–700 (2009). https://doi.org/10.1007/s00170-008-1755-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-008-1755-3