
Abstract
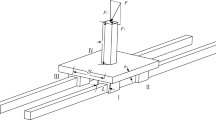
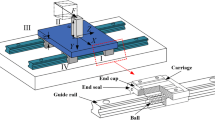
Prior knowledge of the free-vibration responses of a hexapod is strongly needed to avoid resonance occurring in the prevailing complicated machining situations. A comprehensive study has been conducted by the authors on the free vibration of machine tools’ hexapod table, taking account of the whole kinematic chains. The results have been compared with those obtained from the vibration equations of the moving platform. The second approach entailing fewer equations can yield sufficiently accurate results for vibrations occurring in horizontal planes. The theoretical and finite element method (FEM) results exhibit similar trends of changes and are close to each other. The discrepancies between the results arise mainly from the rotational modes of vibration occurring in vertical planes, which are attributable to the dynamic nature of contact models. A hexapod table possesses distinct vibration modes, including linear vibrations in horizontal planes prevailing in lower modes and rotational vibration in higher modes.
Similar content being viewed by others

References
Dasgupta B, Mruthyunjaya TS (2000) The Stewart platform manipulator: a review. Mech Mach Theory 35:15–40
Lin H, McInroy JE (2006) Disturbance attenuation in precise hexapod pointing using positive force feedback. Control Eng Prac 14:1377–1386
Hanieh AA (2003) Active isolation and damping of vibration via Stewart platform. PhD thesis, Active Structure Laboratory, ULB University, Brussels, Belgium
Ren G, Lu Q, Hu N, Nan R, Peng B (2004) On vibration control with Stewart parallel mechanism. Mechatronics 14:1–13
Dasgupta B, Mruthyunjaya TS (1998) Closed-form dynamic equations of the general Stewart platform through the Newton-Euler approach. Mech Mach Theory 33(7):993–1012
Dasgupta B, Mruthyunjaya TS (1998) A Newton-Euler formulation for the inverse dynamics of the Stewart platform manipulator. Mech Mach Theory 33(8):1135–1152
Ivan J, Baiges V (1996) Dynamic modeling of parallel manipulators. PhD dissertation, Graduate School, University of Florida
Lebret G, Liu K, Lewis FL (1993) Dynamic analysis and control of a Stewart platform manipulator. J Robot Syst 10(5):629–655
Pang H, Shahinpoor M (1994) Inverse dynamics of a parallel manipulator. J Robot Syst 11(8):693–702
Dohner JL, Kwan CM, Regerlbrugge ME (1996) Active chatter suppression in an octahedral hexapod milling machine: a design study. Proc SPIE 2721:316–325
Kim HS (1999) Design and control of Stewart platform based machine tool. PhD dissertation, Graduate School, Yonsei University, South Korea
Harib K, Srinivasan K (2003) Kinematic and dynamic analysis of Stewart platform-based machine too structures. Robotica 21:541–554
Mahboubkhah M, Nategh MJ, Esmaeilzade Khadem S (2007) Vibration analysis of machine tool’s hexapod table. Int J Adv Manuf Technol DOI 10.1007/s00170-007-1183-9
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Mahboubkhah, M., Nategh, M.J. & Esmaeilzadeh Khadem, S. A comprehensive study on the free vibration of machine tools’ hexapod table. Int J Adv Manuf Technol 40, 1239–1251 (2009). https://doi.org/10.1007/s00170-008-1433-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-008-1433-5