
Abstract
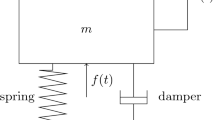
Although computing the transient response of fractional oscillators, characterized by second-order differential equations with fractional derivatives for the damping term, to external loadings has been studied, most existing methodologies have dealt with cases with either restricted fractional orders or simple external loadings. In this paper, considering complicated irregular, but deterministic, loadings acting on oscillators with any fractional order between 0 and 1, efficient frequency/Laplace domain methods for getting transient responses are developed. The proposed methods are based on pole-residue operations. In the frequency domain approach, “artificial” poles located along the imaginary axis of complex plane are designated. In the Laplace domain approach, the “true” poles are extracted through two phases: (1) a discrete impulse response function (IRF) is produced by taking the inverse Fourier transform of the corresponding frequency response function (FRF) that is readily obtained from the exact transfer function (TF), and (2) a complex exponential signal decomposition method, i.e., the Prony-SS method, is invoked to extract the poles and residues. Once the poles/residues of the system are known, those of the response can be determined by simple pole-residue operations. Sequentially, the response time history is readily obtained. Two single-degree-of-freedom (SDOF) fractional oscillators with rational and irrational derivatives, respectively, subjected to sinusoidal and complicated earthquake loading are presented to illustrate the procedure and verify the correctness of the proposed method. The verification is conducted by comparing the results from both the Laplace and the frequency domain approaches with those from the numerical Duhamel integral method. Furthermore, the proposed method applied to a 3-DOF system with fractional damping is also demonstrated.























Similar content being viewed by others
Availability of data and material
All data and material that support the findings of this study are available from the corresponding author by email (jameshu@uri.edu).
Code availability
All code that support the findings of this study are available from the corresponding author by email (jameshu@uri.edu).
References
Achar, B., Hanneken, J., Clarke, T.: Response characteristics of a fractional oscillator. Physica A 309(3–4), 275–288 (2002)
Achar, B., Hanneken, J., Clarke, T.: Damping characteristics of a fractional oscillator. Physica A 339(3–4), 311–319 (2004)
Agrawal, O.: An analytical scheme for stochastic dynamic systems containing fractional derivatives. Proceedings of the 1999 ASME Design Engineering Technical Conferences (1999)
Agrawal, O.: Stochastic analysis of dynamic systems containing fractional derivatives. J. Sound Vib. 5(247), 927–938 (2001)
Bagley, R., Calico, R.: The fractional order state equations for the control of viscoelastically damped structures. AIAA J. 23(6), 918–925 (1985)
Bagley, R., Torvik, J.: Fractional calculus–a different approach to the analysis of viscoelastically damped structures. AIAA J. 21(5), 741–748 (1983)
Caputo, M.: Linear models of dissipation whose q is almost frequency independentii. Geophys. J. Int. 13(5), 529–539 (1967)
Chang, T., Singh, M.: Seismic analysis of structures with a fractional derivative model of viscoelastic dampers. Earthq. Eng. Eng. Vib. 1(2), 251–260 (2002)
Cortés, F., Elejabarrieta, M.: Finite element formulations for transient dynamic analysis in structural systems with viscoelastic treatments containing fractional derivative models. Int. J. Numer. Meth. Eng. 69(10), 2173–2195 (2007)
Craig, R., Kurdila, A.: Fundamentals of Structural Dynamics. Wiley, NY (2006)
Di Paola, M., Failla, G., Pirrotta, A.: Stationary and non-stationary stochastic response of linear fractional viscoelastic systems. Probab. Eng. Mech. 28, 85–90 (2012)
Gaul, L., Klein, P., Kempfle, S.: Impulse response function of an oscillator with fractional derivative in damping description. Mech. Res. Commun. 16(5), 297–305 (1989)
Hu, S., Gao, B.: Computing transient response of dynamic systems in the frequency domain. J. Eng. Mech. 144(2), 04017167 (2018)
Hu, S., Liu, F., Gao, B., Li, H.: Pole-residue method for numerical dynamic analysis. J. Eng. Mech. 142(8), 04016045 (2016)
Hu, S., Yang, W., Li, H.: Signal decomposition and reconstruction using complex exponential models. Mech. Syst. Signal Process. 40(2), 421–438 (2013)
Huang, Z., Jin, X., Lim, C.W., Wang, Y.: Statistical analysis for stochastic systems including fractional derivatives. Nonlinear Dyn. 59(1–2), 339–349 (2010)
Koh, C., Kelly, J.: Application of fractional derivatives to seismic analysis of base-isolated models. Earthq. Eng. Struct. Dyn. 19(2), 229–241 (1990)
Kreyszig, E.: Advanced Engineering Mathematics. Wiley, NY (2010)
Matlob, M., Jamali, Y.: “The concepts and applications of fractional order differential calculus in modeling of viscoelastic systems: A primer.” Critical Reviews in Biomedical Engineering, 47(4) (2019)
Mendiguren, J., Cortés, F., Galdos, L.: A generalised fractional derivative model to represent elastoplastic behaviour of metals. Int. J. Mech. Sci. 65(1), 12–17 (2012)
Naber, M.: “Linear fractionally damped oscillator.” International Journal of Differential Equations (2010)
Pinnola, F.: Statistical correlation of fractional oscillator response by complex spectral moments and state variable expansion. Commun. Nonlinear Sci. Numer. Simul. 39, 343–359 (2016)
Sheng, H., Li, Y., Chen, Y.: Application of numerical inverse laplace transform algorithms in fractional calculus. J. Franklin Inst. 348(2), 315–330 (2011)
Shokooh, A., Suárez, L.: A comparison of numerical methods applied to a fractional model of damping materials. J. Vib. Control 5(3), 331–354 (1999)
Suarez, L., Shokooh, A.: Response of systems with damping materials modeled using fractional calculus. Applied Mechanics Review, 48(11) (1995)
Suarez, L., Shokooh, A.: An eigenvector expansion method for the solution of motion containing fractional derivatives. J. Appl. Mech. 64(3), 629–635 (1997)
Ye, K., Li, L., Tang, J.: Stochastic seismic response of structures with added viscoelastic dampers modeled by fractional derivative. Earthq. Eng. Eng. Vib. 2(1), 133–139 (2003)
Yuan, L., Agrawal, O.: A numerical scheme for dynamic systems containing fractional derivatives. J. Vib. Acoust. 124(2), 321–324 (2002)
Zarraga, O., Sarría, I., García-Barruetabeña, J., Cortés, F.: An analysis of the dynamical behaviour of systems with fractional damping for mechanical engineering applications. Symmetry 11(12), 1499 (2019)
Acknowledgements
The research was financially supported by the Postdoctoral Research Foundation of China (Grant No.2021M690521) and the National Natural Science Foundation of China (Grant No.51879250).
Funding
Postdoctoral Research Foundation of China, Grant No.2021M690521, received by Qianying Cao. National Natural Science Foundation of China, Grant No.51879250, received by Huajun Li.
Author information
Authors and Affiliations
Contributions
Qianying Cao: Conceptualization, Methodology, Formal analysis, Software, Validation, Writing-Original draft, Funding acquisition. Sau-Lon James Hu: Conceptualization, Methodology, Supervision, Writing-Review & Editing, Project administration. Huajun Li: Resources, Review & editing, Funding acquisition.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Ethical approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix I: Summary of the Prony-SS method
Appendix I: Summary of the Prony-SS method
Given the IRF signal h(t) that are sampled with interval \(\Delta t\), \(h(t_k)=h(k\Delta t)\), \(k=0,1,\cdots ,N-1\), using the Prony-SS method is to approximate h(t) as \(\sum _{n=1}^{N_n} \beta _n\, \exp (\mu _n t)\). Summarized here is the three sequential steps of the Prony-SS method to determine \(N_n\), \(\mu _n\) and \(\beta _n\), respectively.
Step 1 for determining \(N_n\): Construct the Hankel matrix \({\mathbf {H}}(0)\) \(\in {\mathbb {R}}^{\xi \times \eta }\) from the sampled signal \(h(t_k)\):
where \(\xi +\eta =N\), and a better choice is both \(\xi \) and \(\eta \) are close to N/2. Applying the singular value decomposition of \({\mathbf {H}}(0)\) gives
Where \({\mathbf {U}}_{1} \in {\mathbb {R}}^{\xi \times N_n}\), \({\mathbf {S}}_{1} \in {\mathbb {R}}^{N_n \times N_n}\) and \({\mathbf {V}}_{1} \in {\mathbb {R}}^{\eta \times N_n}\); theoretically, \(N_n\) is the rank of \({\mathbf {H}}(0)\), i.e., the number of nonzero singular values in Eq. 54. Mathematically, the singular values go to zero when the rank of the matrix is exceeded; however, for data involving random errors or inconsistencies, some singular values will be very small, but not exactly zero. In this situation, \(N_n\) could be determined based on the magnitudes of the singular values having been ordered sequentially from the largest to the smallest; a conventional way to determine \(N_n\) is based on a significant drop of the normalized singular values.
Step 2 for determining \(\mu _n\): Construct the Hankel matrix \({\mathbf {H}}(1)\) \(\in {\mathbb {R}}^{\xi \times \eta }\) from the sampled signal \(h(t_k)\):
Using \({\mathbf {U}}_{1}\), \({\mathbf {S}}_{1}\), \({\mathbf {V}}_{1}\) and \({{\mathbf {H}}}(1)\), one computes
After computing the eigenvalues \(z_n\), \(n=1,\cdots ,N_n\), of \({\mathbf {A}}\), one can get \(\mu _n=\ln (z_n)/\Delta t\).
Step 3 for determining \(\beta _n\): Compute the complex coefficients \(\beta _n\) by solving a set of linear equations using a least-square procedure, based on the obtained \(z_n\) and the sampled \(h(t_k)\):
Rights and permissions
About this article

Cite this article
Cao, Q., Hu, SL.J. & Li, H. Frequency/Laplace domain methods for computing transient responses of fractional oscillators. Nonlinear Dyn 108, 1509–1523 (2022). https://doi.org/10.1007/s11071-022-07256-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07256-2