
Abstract
According to the requirements of operation safety in railway vehicle hydrogen refueling station, the risk factors affecting the operation safety were selected, the calculation formula of evaluation index was derived, and the Bayesian network model based on T-S fuzzy fault tree was constructed. The triangular membership function, the fuzzy subset of failure probability and the posterior probability formula were used to verify the availability of the safety risk assessment method.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
As a renewable, clean and efficient secondary energy source, hydrogen energy has many advantages such as wide source, high calorific value, pollution-free combustion and various forms of utilization. Hydrogen energy is widely used in the field of rail transportation [1]. The construction of hydrogen refueling stations is the basis for the large-scale application of hydrogen vehicles, and the safe operation of hydrogen refueling stations is a necessary guarantee for the movement of hydrogen rail vehicles. At present, more than 300 hydrogen refueling stations have been built nationwide, and the number of hydrogen refueling stations in China ranks the first in the world [2]. For the safe operation of hydrogen refueling stations for rail transportation, it is necessary to regularly evaluate the safety of hydrogen refueling stations and develop an effective emergency treatment plan.
Fault tree analysis method, as an effective tool for reliability and safety analysis of large complex systems, is widely used in safety risk evaluation [3]. However, the inadequacy of the probability, bimodal and with-or-with relationship assumptions in the traditional fault tree severely restricts the further application of the fault tree analysis method. In the literature [4], fuzzy set theory was introduced to describe the connection between events with T-S gates instead of with-or-gates, while the effects of multiple fault degrees on the system were considered to solve the problems of traditional fault trees. Compared with the T-S fuzzy fault tree analysis method, Bayesian networks have advantages in dealing with logical relations of events, system polymorphism and computational simplicity. The literature [5] introduced fuzzy set theory into Bayesian network analysis to solve the problem of over-reliance on exact fault probability and successfully applied it to urban road traffic accident analysis. However, the study was only for two-state systems, and the conditional probability parameters of Bayesian networks are difficult to determine, making it difficult to perform real-time dynamic evaluation. In view of the superiority and complementarity of T-S fuzzy fault trees and Bayesian networks.
This paper proposes a safety risk evaluation method of rail transit hydrogen refueling station based on T-S fuzzy fault tree and Bayesian network. Through the transformation of T-S fuzzy fault tree to Bayesian network, the Bayesian network model and node conditional probability table are determined, and the fault states and fault probabilities of nodes are described by using fuzzy numbers and fuzzy subsets, and the safety risk evaluation method of rail transit hydrogen refueling station is calculated.
2 Basic Theory and Methods
2.1 Constructing Bayesian Networks Based on T-S Fuzzy Fault Trees
The T-S fuzzy fault tree model is shown in Fig. 1, where x1, x2, and x3 are the bottom events, y1 is the middle event, y2 is the top event, and a and b are T-S fuzzy gates.

T-S fuzzy fault tree
A Bayesian network is a loop-free network consisting of a conditional probability table and a directed acyclic graph. Vx and Vy in a Bayesian network denote node variables, and if there is an edge from Vx to Vy, Vx is said to be the parent node of Vy, while Vy is the child node of Vx. The structure of a simple Bayesian network is shown in Fig. 2. The nodes without a parent are called root nodes (V1, V2), the nodes without children are called leaf nodes (V3), and the rest are called intermediate nodes (V4).

A simple Bayesian network
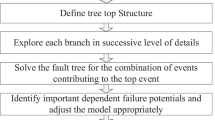
Firstly, the top event, middle event and bottom event in the T-S fuzzy fault tree correspond to the leaf node, middle node and root node of the Bayesian network, respectively, and then the corresponding nodes in the Bayesian network are connected with directed edges according to the T-S gate relationship, and the flow of the Bayesian network constructed based on the T-S fuzzy fault tree is shown in Fig. 3.

A flow chart of Bayesian network based on T-S fuzzy fault tree construction
2.2 Node Description
In this paper, the fuzzy set represented by the triangular affiliation function is chosen to describe the failure probability of each node, and a fuzzy subset of the failure probability of \(xj = xj^{{a_{j} }}\) is set.
In the above equation: f mis the center of the fuzzy subset, Δf1 and Δfr are the left and right fuzzy regions, and the magnitude of the two values indicates the level of fuzziness. If Δf 1 = Δfr = 0, the fuzzy subset is the exact value, \(F(x_{j}^{{a_{j} }} )\) is shown in Fig. 4 according to the triangular affiliation function.

Trigonometric affiliation function
2.3 T-S Fuzzy Fault Tree Inference Based on Bayesian Networks
If the fuzzy subset of fault probabilities of each node at each fault state is known to be \(F(x_{1}^{{a_{{_{1} }} }} )\), \(F(x_{2}^{{a_{{_{2} }} }} )\), …, \(F(x_{n}^{{a_{n} }} )\), the fuzzy subset of fault probabilities at T = Tm is obtained by the bucket elimination method.
In the above equation, π(T) is the set of parent nodes for T and π(yq) is the set of parent nodes for yq. In the practical case the current fault state of the root node is unique, then the root node state importance is as follows.
In the above equation, \(P\left( {T = T_{q} \left| {x_{i} = x_{i}{\prime} } \right.} \right)\) is the \(T = T_{q}\) probability of occurrence when \(x_{i} = x_{i}{\prime}\) is the probability of occurrence of \(T = T_{q}\) when the current fault state is 0.
Using the Bayesian conditional probability formula, the probability at \(x_{i} = x_{i}^{{a^{{_{i} }} }}\) when T = Tq can be found as follows.
In the above equation, \(P\left( {x_{i} = x_{i}^{{a_{i} }} \left| {T = T_{q} } \right.} \right)\) is a fuzzy subset of the posterior probability of \(x_{i} = x_{i}^{{a_{i} }}\) when \(T = T_{q}\).
3 Safety Risk Assessment of Rail Transit Hydrogen Refueling Stations Based on T-S Fuzzy Fault Trees and Bayesian Networks
The workflow steps of a rail transit hydrogen refueling station are hydrogen supply, compression, storage, and refueling. The main safety risks come from gas leakage and fire during hydrogen transportation, storage and hydrogen refueling [6].
Combined with the relevant literature to analyze the process flow of hydrogen refueling station, the safety risk factors of hydrogen refueling station are mainly seven categories of station process, pressure system, control system, safety system, environmental factors, human factors and regulations.
From these seven categories as the top events of the assessment system, 26 possible basic events of safety accidents in hydrogen refueling stations were collated and the fault tree model constructed is shown in Fig. 5.

Rail hydrogen refueling station safety risk fault tree
The T-S fuzzy fault tree in Fig. 5 is transformed into a Bayesian network graph, and the intermediate events corresponding to the intermediate nodes y1-y7 are shown in Table 1. Then the conditional probability table of the Bayesian network nodes is assigned by the T-S gate rule and the conditional probability of each node is determined according to the historical data survey weight method to complete the establishment of the Bayesian network.
In this paper, the likelihood level of occurrence of the nodes to be evaluated is determined according to the risk occurrence likelihood level criteria, as detailed in Table 2.
In this paper, a weighted average method is used for processing and analysis to obtain the fault probability fm of each root node; the results of the survey are summarized, and fuzzification of fm is performed to determine Δf1 and Δfr. The fuzzy subset of fault probability of the root node is finally determined.
Based on the established Bayesian network, the fuzzy subset of failure probability of each node is obtained by reasoning using Eq. (3). According to the fault state of each root node, the posterior probability of each root node state is calculated using Eqs. (4) and (5), and the relative weakness of the system is determined under the condition that only the fault state of the root node is known, which facilitates the safety management of the rail transit hydrogen refueling station.
4 Application Analysis
In this paper, we assume that the fault states of root nodes X8 and X9 are no fault and severe fault, which are represented by fuzzy numbers 0 and 1, respectively, and the fault states of the remaining nodes are no fault, medium fault and severe fault, which are represented by 0, 0.5 and 1, respectively. Combined with the workflow of the rail transit hydrogen refueling station and the percentage of each safety risk factor in the operation of the station, the fuzzy subset F(Xj = 1) of failure probability with failure state of each node is obtained, as shown in Table 3. Where the fuzzification parameter Δf1 = Δfr = 0.15fm, and the middle element is the center of the fuzzy subset.
For the purpose of analysis, this paper assumes that the fuzzy subset of failure probabilities for root node failure states of 0.5 and 1 are the same. According to the root node failure probability subset, the conditional probability table of the intermediate node y1 of Bayesian network is listed as shown in Table 4, where rule 1 indicates that the probability of y1 being 0, 0.5 and 1 is 0 when X8 is 0 and X9 is 0, and other rules and so on.
Based on the constructed Bayesian network, the conditional probability table of the nodes is combined with the inference using Eq. (3) to obtain the fuzzy subset of failure probabilities when the failure states of the leaf nodes are 0, 0.5 and 1.
In practical application, it is also necessary to consider the influencing factors that play a significant role in the safety risk of rail transit hydrogen refueling stations and pay attention to the order of each influencing factor. The posterior probability of each root node is calculated using Eqs. (4) and (5), as shown in Table 5.
The above calculation results show that the probability of moderate or serious failure is small, while the probability of no failure is large, which is consistent with the actual situation and verifies the accuracy and feasibility of the method in this paper. According to the principle of maximum affiliation, the safety risk level of this hydrogen refueling station can be determined and the countermeasures that should be taken can be analyzed. According to the existing safety risk management scheme, it is enough to strengthen the monitoring, but it is also necessary to pay attention to the changes of each influencing factor and take corresponding measures.
5 Conclusion
In this paper, the safety risks affecting the operation of rail transit hydrogen refueling stations are studied. Firstly, the safety risk factors affecting the operation of hydrogen refueling stations are selected and the formulae for the evaluation indexes are derived; then a Bayesian network model based on the T-S fuzzy fault tree analysis method is constructed and the conditional probability table of Bayesian network nodes is assigned with the basic events of potential hydrogen refueling station safety accidents; finally, the triangle affiliation function, the fuzzy subset of failure probabilities and the posterior probability formulae are used for the calculation. The usability of this safety risk evaluation method is verified.
References
Lin, W., Liu, W., Li, Y.: Study on the development strategy of China's hydrogen energy infrastructure industry. Strateg Study CAE J. 21(3), 78–79 (2019)
Zhang, Z., Zhang, G., Liu, Y.: Current situation and prospect of hydrogen refueling station construction in China. Energy Conserv. J. 37(6), 16–19 (2018)
Yao, C., Zhang, Y., Wang, X.: T-S fuzzy fault tree importance analysis method. Chin. Mech. Eng. J. 22(11), 1261–1268 (2011)
Song, H., Zhang, H., Wang, X.: T-S fuzzy fault tree analysis method. Control Decis. J. 20(8), 854–859 (2005)
Zhao, J., Deng, W., Wang, J.: Bayesian network-based analysis of urban road traffic accidents. J. Southeast Univ. (Nat. Sci. Ed.) 41(6), 1300–1306 (2011)
Ruan, J., Luo, Y., Tang, J.: Discussion on the safe and reliable operation of hydrogen refueling mother stations and countermeasures. Saf. Health Environ. J. 21(9), 28–31 (2021)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this paper

Cite this paper
Shi, L., Gao, Y., Wang, J., Sun, S., Chen, L., Xiang, W. (2024). Study on Safety Risk of Railway Vehicle Hydrogen Refueling Station Based on T-S Fuzzy Fault Tree and Bayesian Network. In: Sun, H., Pei, W., Dong, Y., Yu, H., You, S. (eds) Proceedings of the 10th Hydrogen Technology Convention, Volume 1. WHTC 2023. Springer Proceedings in Physics, vol 393. Springer, Singapore. https://doi.org/10.1007/978-981-99-8631-6_14
Download citation
DOI: https://doi.org/10.1007/978-981-99-8631-6_14
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-8630-9
Online ISBN: 978-981-99-8631-6
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)