
Abstract
Floating nuclear power plants (FNPP) are a combination of small nuclear reactors and hull structures. The applicable design codes and simulation analysis methods of floating nuclear power plants are nearly seldom, especially for the ultimate strength of containment considering multi loads. In order to analyze the structural strength of the steel containment of a floating nuclear power plant under the combined action of multiple loads, the structural response is analyzed in ANSYS considering the external hull loads and internal containment loads such as wave loads, wind loads, current loads, hull impact loads, internal pressure and temperature of the containment. The structural response result from wind, wave, current, internal pressure and temperature loads are calculated, separately, to obtain the stress field of the containment. Finally, the stress fields of the containment generated by each load are superimposed to obtain the stress distribution characteristics of the containment, and then strength assessment and stress analysis are performed.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
- Floating nuclear power plant
- combined multi-load action
- quasi-static equivalence
- containment
- stress analysis
1 Introduction
As small reactor technology continues to develop, the advantages of using nuclear reactors on offshore floating platforms to provide energy such as electricity for areas such as offshore oil extraction or remote areas are emerging. In addition, offshore nuclear power plants can also meet a variety of needs such as heat supply and desalination. As a combination of small nuclear reactors and offshore vessels, offshore floating nuclear power plants are becoming a hot spot for engineering research applications. How to ensure the safety of reactors and floating platforms under various accidental operating conditions and extreme loads has become the focus of technical research on offshore floating nuclear power plants [1].
At present, the most mature floating nuclear power plant is the Russian “Lomonosov”, which is a large unpowered barge carrying two “KLT-40” type nuclear reactors [2]. In the USA, MIT has designed and developed a new offshore cylindrical floating nuclear power plant that combines an advanced light water reactor with a floating platform, similar in structure to an offshore oil and gas plant [3]. South Korea and France have each developed concepts for the safe design of floating nuclear power plants by submerging them underwater [4].
The safety of floating nuclear power plants is a central factor in their structural design. Because floating nuclear power plants have a nuclear reactor compartment that houses the containment and support structures that encase the reactor, the safety requirements for the containment structure during the design phase are higher than those for conventional nuclear reactors and conventional marine platforms. Under the unique accident conditions of a nuclear power plant and the superposition of multiple accident loads in the sea, both the internal steel structure of the containment and the external support elements are subject to material yielding or structural failure. Therefore, we need to take into account the external hull loads and internal containment loads in various typical marine environments, such as wave loads, wind loads, current loads, hull impact loads, internal pressure in the containment and temperature.
In this paper, the structural response to the combined effects of multiple loads is analyzed in ANSYS, and the structural response to the wave, hydrostatic, internal pressure and temperature loads are calculated separately to obtain the stress field of the containment under the individual effects of the above loads.
2 Materials and Methods
2.1 Study Subjects
The finite element analysis software ANSYS is used to build the overall analysis model of the floating nuclear power plant including the hull and the containment (including support) structure, in which the hull part uses shell cells, the bone part uses beam or shell cells, and the steel containment (including support) uses solid cells.
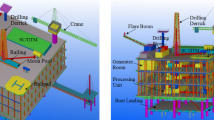
The hull structure finite element model is constructed using shell181 and beam188 cells, the mesh size of the containment and support part is 0.1 m, the mesh size of the support and hull transition part is 0.2 m, and the rest of the mesh size is 0.8 m. For the pressure vessel structure which is the focus of analysis, the shell cell is used to simplify the analysis. Steel containment shells and internal components such as multi-layer platforms, core shells and pressure suppression pools were established. The geometric model is shown in Fig. 1.

Geometric model of vessel structure and FNPP
Because of the special characteristics of the nuclear reactor in the containment compartment, the steel plate material used for the containment structure cannot be traditional marine steel, but needs to be high strength steel. In this paper, SA738GrB steel is chosen as the material strength standard. The material properties are shown in the table below (Table 1).
2.2 Combination of Working Conditions
The containment structure needs to meet the strength requirements of the load combinations under different categories of operating conditions. Combined with the design provisions of the MC class components in the ASME Code [5], the containment loads are divided into several categories of operating conditions such as A, B, C and D.
Referring to the onshore nuclear power plant containment analysis model, the floating reactor will focus on the marine environmental loads, and the design wave is selected as the ultimate wave load in this paper, replacing the onshore nuclear power plant seismic load. In addition, there are external loads caused by man-made events, such as ship collisions, as accidental load conditions for floating reactor containment. Therefore, the design conditions and load combinations for the containment are shown in Table 2. In the table, I to VIII denote gravity, hydrostatic pressure, ultimate wave load, operating pressure, abnormal pressure, accident pressure, thermal load under accident conditions, and collision load respectively.
2.3 Internal Pressure Loads and Temperature Loads
Nuclear power platforms with a range of design basis accidents based on regulatory or accident analysis assumptions are a fundamental requirement for system design to be met. For reactors, the design basis accident for floating nuclear power plant containment can be modelled on that for land-based nuclear power plants. It is generally accepted that the most serious baseline accident is the Loss of Coolant Accident (LOCA), which causes an increase in containment pressure and temperature [6], and the containment design should meet the structural integrity under this condition.
In the event of a LOCA accident, the pressure inside the containment rises rapidly from 0.1 MPa to 0.8 MPa, and under containment pressure suppression measures the pressure drops to about 0.6 MPa and the temperature drops to about 150 ℃.
Combined with the operating conditions of a floating nuclear power plant, the maximum vessel temperature of the containment for accidental operation is 300 °F (148.89 ℃) according to the US onshore AP1000 nuclear power plant containment design control document. In the workbench steady state thermal module, the temperature field of the containment and the floating nuclear power plant as a whole can be simulated, and the thermal stresses in the containment structure can then be calculated (Fig. 2).

Temperature field of part of the structure
It is therefore considered that the containment abnormal pressure is 0.6 MPa and the accident pressure is 0.8 MPa. The accidental service heat load can be calculated indirectly by importing the.rth whole ship temperature field in ANSYS to calculate the whole ship temperature stress.
2.4 Wave Load
The principle of design waves is to replace randomly distributed waves with a series of regular wave equivalents. In order to be able to reflect the maximum force on the platform, the equivalent design waves should put the platform in the most dangerous wave loading condition. The design wave method can simplify the calculation process of wave loads and is widely used by the engineering community. At present, it is mainly divided into deterministic methods, stochastic methods and long-term forecasting methods.
The stochastic design wave method is a short-term forecast of the platform through the wave spectrum, which is more informative than the deterministic design wave method as it reflects the random nature of waves.
Firstly, the overall hydrodynamic characteristic response and load transfer function RAO are determined, then the appropriate wave spectrum \(Sw\left( \omega \right)\) is selected based on the meaningful wave height in the short-term sea state, and the response spectrum SR(ω) of the wave load is calculated, i.e. \(SR\left( \omega \right) = \left[ {RAO\left( \omega \right)} \right]^{2} Sw\left( \omega \right)\).
Finally, the maximum load response value R and the corresponding load transfer function are selected to calculate the design wave amplitude. The design wave amplitude, A, for stochastic design wave forecasting can be calculated by the following equation: \(A = \left( {Rmax/RAO} \right)\). The process is shown in the diagram below (Fig. 3).

Design wave calculation flow chart
2.4.1 Frequency Domain Wave Transfer Loads
Regarding the analysis of the load-bearing characteristics of the structural system of floating nuclear power plants under wave action, firstly, based on the overall analysis model of floating nuclear power plants established by ANSYS, the overall hydrodynamic analysis model of floating nuclear power plants can be established using ANSYS-AQWA in combination with the weight of the reactor of the floating nuclear power plant, the center of gravity and other parameters, and further carry out the overall hydrodynamic analysis of floating nuclear power plants under all-round wave incidence angle to obtain the relevant The wave load distribution characteristics of the overall structure of the floating nuclear power plant in the relevant sea area were obtained.
In this project, the waves are divided into 13 directions for analysis, with wave directions set at 15° intervals from 0° to 180°. Load them into the hull to calculate the structural response, the structural response is the corresponding structural under the action of unit wave amplitude, extract the combined force acting on top of the floating nuclear power plant containment, the transfer function is the modulus square of the extracted combined force, thus the transfer function obtained.
2.4.2 Wave and Response Spectra
Due to the shallow depth of the marine structures analyzed in this project and the combined distribution of effective wave height and spectral peak period, the improved JONSWAP spectrum is recommended for the prediction of wave loads in different wave directions. The improved JONSWAP spectrum is expressed in the following form.
Wave loads on ships are forecast using spectral analysis. Short-term forecasts are generally within a few hours, so short-term waves can be considered as a smooth normal stochastic process with zero mean, where the response of the ship to the waves can be considered as a linear relationship, so the wave load response is also a smooth normal stochastic process with zero mean. The response spectrum of a ship's wave load can be expressed as the product of the wave spectrum and the transfer function squared, i.e.
Considering the diffusion effect of the wave, a diffusion function can be introduced, which is the angle between the combined wave and the main wave direction. The diffusion function can generally be taken as:
Calculating the nth order spectral moment of the response spectrum yields a range of response values.
where is the spectral moment of order of the response spectrum; is the angle between the combined wave and the main wave direction.
It has been shown that the short-term response of the ship's wave load amplitude follows a Rayleigh distribution with a probability distribution function F(x) of
m0 is the 0th order moment of the response spectrum. The amplitude of the wave load response of the ship corresponding to any exceeded probability level in a certain sea state can be obtained. The design value of wave load R for a ship at a certain number of fluctuations N is:
2.4.3 Determination of Design Wave Parameters
The maximum meaningful wave height for a floating nuclear power plant in the vicinity of the operating sea is 5.2 m with a spectral peak period of 7.8 s. The wave load design calculates the wave bending moment at a probability level of 10–8 for a 500 years event. The design wave amplitude is calculated by taking the maximum load response value R and the corresponding load transfer function per unit wave amplitude. The design wave amplitude, A, for a stochastic design wave forecast can be calculated by the following equation:\(A = \left( {Rmax/RAO} \right)\).
From this the design wave height corresponding to the wave bending moment at the 10–8 probability level can be calculated, as shown in the table below (Table 3).
2.5 Crash Load
Collision simulation and quasi-static equivalence in the workbench LS-DYNA module. A container ship with a displacement of 5000 T was selected for this artificial accident load. Lateral collision stresses were calculated to simulate the most dangerous external accident. The impact site is the middle port side of the transom hold.
The dynamic forces of the collision need to be converted into equivalent static forces so as to superimpose with other physical field stresses, there are relevant international codes to simplify the calculation of ship collision forces, among which the European code and the American code are more commonly used and accurate. 1999 European code gives the ship collision force calculation formula to consider the ship navigation waters. The formula given in the 1999 Eurocode takes into account the impact of the ship's speed and tonnage on the collision force and is more applicable to this case.
The simplified Eurocode formula for ship collision force is shown below.
where P is the collision force (N), v is the ship impact velocity, K is the ship equivalent stiffness, for sea area ships can be taken as 15 × 106 N/m, m is the collision ship mass (kg).
Through the formula calculation, 2m/s impact of 5000 tons ship equivalent collision static force is 1.73x107N.
2.6 Stress Analysis Methods
Based on the ASME Code, we use the Analytical method to carry out stress intensity checks. We classify the stresses at each check point along the thickness direction to obtain the corresponding membrane stress, bending stress and peak stress.
The membrane stress is the average of the target stresses integrated in the thickness direction and the bending stress is the total stress at the point of integration in the thickness direction minus the membrane stress, i.e. the sum of the membrane stress and bending stress is the stress on the surface of the shell unit. According to the stress intensity calculation method specified in the ASME Code, the stress intensity value of the target node is the Tresca stress value.
For a node connected to different units, the magnitude of the stress value extrapolated to the node by each unit is not necessarily the same. The FEA software usually uses the arithmetic mean of the above extrapolated stress values as the equivalent of the stress value at the node. However, in the case of a discontinuous structure or a local structure with a non-uniform distribution of stress levels, the stress values extrapolated to the node vary considerably and the use of arithmetic averaging to estimate the stress level at the node is not desirable. Therefore, when calibrating the strength of the containment, the extrapolated stress value of the unit in the region with the higher stress level should be used as the stress value at the node.
3 Results
3.1 Stress Evaluation
Different levels of service have different stress limits in the elastic analysis, for the design condition and the limits specified for the operational condition, as shown in the table below (Table 4).
where Sy, Sm, Sn are the yield strength, design strength and tensile strength respectively.
3.2 Individual Load Conditions
The stress response of the whole vessel under the above loads acting separately and independently was calculated in ANSYS and the maximum stresses in the pressure vessel structure under each load were extracted. The results are shown in the Table 5 and Fig. 4.
After analysis, the film and bending stresses of all load components except thermal stresses meet the stress limits.

Individual load stress analysis
Only one node exceeds the stress limit under thermal stress, the maximum stress occurs at the bottom support of the containment shell, the film stress at the node at the maximum stress location is 415.45MPa, the maximum film stress plus bending stress is 441.70MPa, the maximum stress occurs locally. The other locations of the bottom support are all less than 400MPa, the maximum stress at the containment shell is 85.63MPa and the maximum stress at the pressure suppression pool is 274.15MPa, both of which meet the stress limits.
3.3 Combined Load Conditions
The stress field results are calculated individually and obtained as rst results files, after which the stress field results are superimposed according to the combination of conditions to obtain the superimposed stress field and then analyze the structural stress distribution. The superimposed stress field for the whole ship and the containment stress field (Fig. 5).

Combined load conditions stress analysis
4 Discussion
Comparing the structural response of the hull under each condition individually, it can be seen that hydrostatic pressure, temperature load and internal pressure have a greater influence on the stresses of the whole ship and the containment structure.
Comparing the elastic stress composition of each condition, the stresses caused by internal pressure are primary stresses; the temperature load, design wave and other conditions belong to the stresses generated by the containment structure to meet the displacement restraint conditions or the continuous requirements of its own deformation after being subjected to displacement loads, which are secondary stresses. The internal pressure, hydrostatic pressure, thermal stress and design wave conditions are mainly composed of film stress, and bending stress is small; while the bending stress accounts for a large proportion of the stress in the collision condition.
For the composition of the combined working condition stress: for the maximum stress point at the bottom support, mainly the high temperature thermal stress and hydrostatic pressure have a large force on it. For the internal structure of the containment, especially the relatively high stress parts of the ground floor platform and the outer shell, are mainly affected by internal pressure and thermal stresses.

Pressure vessel mises stress clouds for operating conditions A, B, C and D
The stresses on the containment structure are calculated to be lower in conditions A and B and higher in conditions C and D under extreme loads. The stress distribution of the pressure vessel mises under working conditions A, B, C and D is shown in Fig. 6. The maximum stresses occurred at the bottom support and the inner base plate weld, while the maximum film stress in accident condition D was 538 MPa, reaching 92% of the stress limit, and the sum of the maximum film stress and bending stress was 584.9 MPa, reaching 99.6% of the limit. These are local stress and the overall maximum film stress in the bottom support is approximately 254MPa, which is below the ASME Nuclear Code and Standard Stress Strength Assessment Value, and below the Offshore Mobile Platform Entry Code Allowable Strength and Material Yield Value. This indicates that the design of the structure satisfies the containment and floating nuclear power plant limits for self-sustainability.
References
Qiu, C.F., Deng, J., Chen, H.H., Li, F., Yu, N., Wu, P., et al.: Modular small reactor overpressure risk and design optimization study. Atomic Energy Sci. Technol. 50(1), 5 (2016)
Dowdall, M., Standring, W.: Floating nuclear power plants and associated technologies in the northern areas. Norwegian Radiation Protection Authority (2008)
Kindfuller, V., Todreas, N., Buongiorno, J., et al.: Overview of security plan for offshore floating nuclear plant. In: International Conference on Nuclear Engineering, V005T15A076 (2016)
IAEA. Nuclear Technology Review. Section B, Advanced Fission And Fusion (2014)
American Society of Mechanical Engineers. ASME BPVC-III rules for construction of nuclear facility components. Volume 1 NE Sub-volume: MC-class components. 2004 Edition. Shanghai Science and Technology Press, Shanghai (2007)
Tan, M,. Li, P.F., Guo, J., et al.: Design of floating nuclear power plant containment under marine environment conditions. Chin. J. Ship Res. 15(1), 107–112, 144 (2020)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Li, J., Wang, D., Zhang, M., Liu, H., Qu, X. (2023). Study of Stress Analysis Method for Floating Nuclear Power Plant Containment Under Combined Multiple Loads. In: Liu, C. (eds) Proceedings of the 23rd Pacific Basin Nuclear Conference, Volume 1. PBNC 2022. Springer Proceedings in Physics, vol 283. Springer, Singapore. https://doi.org/10.1007/978-981-99-1023-6_69
Download citation
DOI: https://doi.org/10.1007/978-981-99-1023-6_69
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-1022-9
Online ISBN: 978-981-99-1023-6
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)