
Abstract
This paper aims at the scattered management system, low service level, multi-level and multi-line ship locks caused by the numerous ship locks in Guangxi and they belong to different owners. For outstanding problems such as lack of scheduling theory and methods, and weak security and intelligent management and control capabilities, the top-level design of the joint scheduling of multi-stage and multi-line ship lock groups in the basin is carried out, and the joint scheduling technology of parallel four-line ship lock groups with different scales and levels under complex navigation restrictions is carried out. Research and development of key technologies for intelligent scheduling platform for line ship lock groups, key technology research on management and control safety in multi-level and multi-line ship lock clusters, and research on joint dispatch model and dispatch theory and methods for busy multi-level ship lock groups, so as to realize joint dispatch and centralized management and control of watershed ship lock groups. The overall navigation efficiency of the basin will be greatly improved, and it will provide a reference for the innovation of the navigation management mode of the ship lock group in the basin.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Background
Inland river shipping, with advantages of large traffic volume, small energy consumption, less land occupation and low cost, plays an important position in comprehensive transportation system in China. The Xijiang main line and its main tributaries are the important “one horizontal” in the “four vertical, four horizontal and two networks” of the national water transport main channel. The total navigable mileage of Xijiang main line reaches 5,873 km, which is an important part of China’s modern comprehensive transportation system. Guangxi has developed hydrographic net and numerous locks, with four characteristics of “multi-line, multi-cascade, multiple elements and multiple owners”. The “one trunk and three branches” shipping system includes 20 cascades and 25 locks, involving 13 enterprises and transportation, water conservancy, power generation and other administrative departments integrating navigation AIDS, water level, bridges, shoals, ships, docks, locks and other elements. The previous operation and control mode of the ship lock cannot meet the needs of the rapid development of inland water transport in Guangxi. There are mainly prominent problems such as decentralized management system, low service level, insufficient research on multi-stage and multi-line lock scheduling technology, and relatively weak intelligent control ability of lock safety. The problems are: (1) the lack of effective management system between multiple owners, the prominent contradiction between navigation and electricity, and the great differences in the scheduling level of each lock, which affects the navigation efficiency; (2) The multi-stage and multi-line ship lock scheduling technology urgently needs a breakthrough. In particular, it is necessary to solve the scheduling problem of complex navigation restriction and super large lock group navigation restriction interwoven section after the expansion of Changzhou third and fourth line locks. Efficient navigation of river basin puts forward higher requirements for the joint scheduling of multi-stage and multi-line ship locks as well. (3) Repeated reports to the lock are needed when ships use the traditional gate mode to pass through the multi-cascade hub, which leads to low level of service. The rapid development of inland water transport in Guangxi urgently needs information technology. (4) It is urgent to improve the safety control ability of the lock after centralized scheduling and unattended lock. New technologies such as intelligent perception, remote monitoring and early warning need to be introduced to ensure the safe operation of the lock.
2 Research Content
Centering on the overall goal of Xijiang multi-cascade multi-line lock group scheduling integration, efficient navigation, intelligent control and intelligent service, We have carried out a lot of research and technology research and development from the aspects of multi-cascade and multi-line lock group management mode design, joint scheduling technology innovation, the establishment of lock intelligent scheduling platform, and the centralized control and safety of locks. We realize the “centralized control, unified dispatch, unified command, joint operation and remote monitoring” of the multi-cascade, multi-line and multi-owner ship lock of the Xijiang River, which improves the navigation efficiency and management level of the lock group, and ensures the safe operation of the lock group.
3 Concepts and Technical Structure
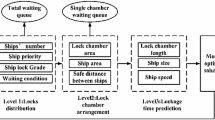
The project revolves around the efficient and safe navigation of multi-level, multi-line and multi-owner locks. Taking aspects of the top-level system design, multi-line lock scheduling technology, software and hardware research and development into consideration, we adopt the method of combining development and engineering application to construct the joint scheduling platform of multi-cascade and multi-line ship lock group, and innovated the lock group centralized control safety technology. We will learn from our experience and develop it independently. We follow the overall research principle of appropriate advanced and have overcome the key technical difficulties. The general idea and technical route of the research are shown in Fig. 1.

General idea of project research
4 Research Findings
4.1 Innovation the Theory of Multi-cascade Multi-line Lock Group
-
(1)
Based on operation rule of lock entrance area and traffic flow conflict theory, we propose a new method for the arrangement of complex multi-line lock (Fig. 2).
Fig. 2. 
Schematic diagram of ship traffic flow between upstream and downstream anchorage of Changzhou Junction
Changzhou four-lane ship lock project is taken as an example. In the scheme of double sides of piers, each side can dock ships for one lock operation time. By analyzing the traffic flow into and from the ship lock gate, we found that two-way docking piers were set on the inside of the first, second and third and fourth line sluice channels. During the operation of the lock, two conflict zones at the gate of the approach channel would be caused by the incoming and outgoing ship. That is, the zones A and B in Fig. 1. There are three possibilities: Q1 and Q1’; Q2 and Q2’, and Q3 and Q2’.
If the single side pier is used, that is, the first, second and third and fourth line gate groups are only set on the right side pier, only one conflict zone at the gate of the channel would be caused, during the operation of the lock. That is, the area of area B in Fig. 1. There is only one possibility of crossover, namely, Q2 and Q2 ‘. According to the analysis, the conflicts corresponding to the different landing pier setting methods are shown in Table 1. Therefore, it is safest to lay a single side pier in the first and second and third and fourth line lock diversion channels.
Combined with scheduling scheme research, We can draw the following conclusion. For double sides piers, the replenishment of ship to piers can still be performed during any bidirectional operation cycle, but the operating safety margin is relatively less. For the single side pier, the replenishment time is relatively more sufficient, and the safety and reliability are increased. The optimization scheme of piers layout of multi-line lock is put forward as follow: piers on the right side should be increased appropriately, while being retained on the left side, which is considered as a compromise scheme of above, so that more ships can park on the right side, or temporary docking. This arrangement makes it more like a single-sided scheme. At the same time, it is stipulated that the ship entering the approach channel have priority to dock on the right side of the pier. When the upper ship leaves the gate, the left ship on the ship pier can enter the gate first. At this point, the ship on the right side can move to the left side on the pier. In this way, it can operate according to the single-side dock pier scheme.
-
(2)
The simulation and analysis technology of multi-line parallel lock joint scheduling was invented, and the traffic organization optimization method of multi-line lock group under limited and complex conditions was innovated.
Based on ship scheduling conditions and ship lock operation conditions, a mathematical model of ship lock operation state is established with ship lock operation conditions and ship scheduling conditions as constraints:
$$f(t_{0} + t_{1} + t_{2} ) = \left\{ {\begin{array}{*{20}l} {R(i)\;\quad \quad \left( {t_{2} {\text{ < }}t_{{R(i)}} } \right)} \hfill \\ {R(i + 1)\;\;\quad \quad \left( {t_{2} {\text{ > = }}t_{{R(i)}} ,\,i + 1{\text{ < }} = n} \right)} \hfill \\ {R(0)\quad \quad \,\left( {t_{2} {\text{ > }} = t_{{R(i)}} ,\,i = n} \right){\text{ }}} \hfill \\ \end{array} } \right.$$(1)where f(t0 + t1 + t2) is the state of lock at time t0 + t1 + t2; t0is the time that the model has been running when the previous state ends; t1is the time to wait for the current state; t2is the running time of the current state; i Is the serial number of the state, n and is the maximum value of the serial number; R(i) is the state of ship lock; tR(i) is the duration of the state; The ship lock operation process is divided into 10 states, the serial number of which is = 0, 1, 2, 3, 4, 5, 6, 7, 8, 9.
According to ship scheduling conditions and sailing routes, a mathematical model of fleet movement is established:
$$f(k) = \left\{ {\begin{array}{*{20}l} {L(j) + k \times V(j)\;\;\;\;\quad (k{\text{ < }}(L(j + 1) - L(j))/V(j)){\text{ }}} \hfill \\ {L(j + 1)\qquad\;\;(k > = (L(j + 1) - L(j))/V(j))} \hfill \\ \end{array} } \right.$$(2)where f(k) is the position function of fleet movement at time k; k is the time when the fleet has moved; L(j) is the distance from the starting position of the fleet to the lock; L(j) is the distance between the target position of the fleet and the lock; V(j) is the speed of the fleet in that segment; j is the sequence number of the target location.
According to the waiting time t1 of the lock’s current state in the simulation process, the time t1 when the state is about to change is recorded as t1max, which is the waiting time of each lock in each state. According to the waiting time t1max of each lock in each state, the total waiting time of each lock in the simulated time is calculated as the following formula:
$$ T_{1} =\mathop{\sum t}\nolimits_{1\max } $$(3)where, T1 is the sum of the waiting time of all locks in the simulated time. In the same simulation time, the larger the value is, the lower the operation efficiency of ship lock.
According to the position of the ships at each time and the position of the conflict zone, the traffic flow status of the two fleets that may have conflicts at each time can be judged as p1(t) and p2(t), respectively. When the fleet is located within the conflict zone at time t, it is 1; otherwise, it is 0.
Under the potential route crossing mode of each ship, whether there is a conflict in the conflict zone at time t can be determined by the following conditions:
$$ P(t) = p_{1} ({\text{t)}} \times p_{2} ({\text{t)}} $$(4) -
(3)
The existing scheduling model of lock chamber is improved by using the technology of scheduling point, and the utilization rate of the lock chamber is increased. According to the constraints of lock grade, main size, ship draft, ship tonnage and other factors, a complex multi-line joint scheduling model of lock is established (Fig. 3).
Fig. 3. 
Diagram of scheduling lock chamber model


In order to maximize the overall capacity and optimize the service level of the multi-step lock, an integrated scheduling model of the step lock was established. In view of the congestion of ships in the upstream and downstream of the hub under special conditions, a multi-step ship lock scheduling model of buffer sailing was developed to ease the traffic flow and avoid the large number of ships in a section (Fig. 4).

Diagram of chain locks scheduling model
4.2 The Intelligent Joint Scheduling Technology of Multi-step and Multi-line Lock Group is Developed
Based on the developed inland river shipboard Beidou satellite navigation monitoring terminal and multi-mode node pre-viewing intelligent lock model, the shipboard intelligent lock declaration system was established, and the Xijiang multi-step and multi-line locks group intelligent joint scheduling platform was constructed, realizing multi-source information perception, interaction, processing, intelligent lock and centralized real-time scheduling.
-
(1)
The high-precision Beidou positioning algorithm and black box safety warning model in complex environment were optimized, and the first Beidou satellite navigation monitoring terminal on inland river ships was developed, which solved the problem of multi-source information perception (Fig. 5).

Multi-information data fusion diagram of black box security warning for ship lock scheduling in complex environment
-
(2)
Established multimode nodes in advance at intelligent brake model, innovation of nonlinear thin back mobile GIS technology, embedded mobile big data heterogeneous resource integration technology, developed ship intelligent brake system, to achieve “landed on ship registration, don’t pay cost, a brake, broadly through”, created the Xijiang river basin based on Beidou navigation “smart lock” application mode (Fig. 6).

Schematic diagram of ship automatic lock declaration
-
(3)
By integrating multi-party communication command, cloud computing, Xijiang E-payment, Xijiang Tong APP, and video monitoring of the lock area, the integrated intelligent scheduling platform of multi-step and multi-line lock group has been built (Fig. 7).

Xijiang lock joint scheduling platform
4.3 The Centralized Control and Safety Technology of Multi-step and Multi-line Lock Group is Innovated
The integrated mechanical and electrical monitoring and control of locks, multi-objective monitoring and sensing of lock rooms, online monitoring, diagnosis and early warning models for hydraulic structures of locks and other models have been established. The intelligent sensing and locking control technologies of anti-miter gate clamping ships and floating mooring bollards have been innovated. The centralized control system of multi-step and multi-line locks based on multi-source heterogeneous model has been developed. It has realized the safe, stable and efficient operation of Xijiang multi-step and multi-line lock group.
-
(1)
Research and formulate data access specifications and data standards for multi-owner heterogeneous control system; The deep BP control model of mechatronics is established to realize the mechatronics control and automatic fault diagnosis of ship lock (Fig. 8).
Fig. 8. 
Structure of deep BP control model
The training process of the complete model of deep BP neural network is as follows:
①The pre-trained weight matrix [W] and offset value vector [B] are used to initialize the corresponding parameters of each hidden layer.
②According to the current input sample, formula (5) is derived through BP algorithm to calculate the current output sample.
$$ y_{i} = f\left( {\sum\nolimits_{j - 0}^{n} {W_{ij} x_{j} } } \right) $$(5)③The gradient term of neuron in output layer was calculated according to BP basic formula (6), and the error of output layer was calculated.
$$ E = \frac{1}{2}\sum\nolimits_{l} {\left( {t_{l} - f\left( {\sum\nolimits_{j} {v_{ij} f\left( {\sum\nolimits_{i} {w_{ij} x_{i} - \theta_{j} } } \right) - \theta_{l} } } \right)} \right)^{2} } $$(6)④The error is propagated backward to the neuron of the upper hidden layer, and the gradient term of the neuron of the upper hidden layer is calculated.
⑤The error is transmitted to the next hidden layer, and the process of step (4) is repeated until all the errors of each hidden layer are calculated, and the ownership value matrix is adjusted and updated by formula (7) and (8).
$$ v_{ij} \left( {k + 1} \right) = v_{ij} (k) + \eta \delta_{l} y_{j} $$(7) (8)
(8)Deep BP control model combined with specific scenes, after several rounds of personalized training, has the ability of automatic control for intelligent devices.
-
(2)
A series of models of intelligent perception of ship line-crossing, intelligent perception of ship against miter door clamp, and intelligent perception of floating mooring bollards are established to innovate the intelligent perception of ship line-crossing and lock lockout control, and intelligent perception of floating mooring bollards and lock lockout control technologies (Fig. 9).
Fig. 9. 
Overline alarm system based on machine vision
-
(3)
The on-line monitoring, diagnosing and early warning technology of lock hydraulic building safety were innovated. Piers and retaining wall structure monitoring, Beidou displacement monitoring of lock and other technologies integrated innovatively, which realize the online safety monitoring, diagnosing and automatic warning of ship lock hydraulic structures, and ensure the safe, stable and efficient operation of Xijiang multi-step and multi-line lock group.
In the sub-pixel displacement search algorithm for retaining wall structure position movement monitoring, its expression as follow:
$$w\left( {\bar{s}} \right) = {\text{ }}\left\{ {\begin{array}{*{20}l} {\frac{2}{3} - 4\bar{s}^{2} + 4\bar{s}^{3} \qquad \qquad \quad\!\! \bar{s} \le \frac{1}{2}{\text{ }}} \hfill \\ {\frac{4}{3} - 4\bar{s} + 4\bar{s}^{2} - \frac{4}{3}\bar{s}^{3} \,\,\frac{1}{2}{\text{ < }}\bar{s} \le 1} \hfill \\ {0\quad \quad \quad \quad \quad \quad \qquad \quad \quad \,\,\!\bar{s} \le 1} \hfill \\ \end{array} } \right.$$(9)where \(\left( {\overline{s}} \right) = \frac{s}{{s_{max} }}\) is the relative distance between a node in the supported domain and \(s_{max}\) is the supported radius. Then the residual sum function can be expressed as
$$ J = \mathop{\sum}\nolimits_{j = 1}^{n} w\left( {x - x_{j} } \right)\left[ {f\left( x \right) - y_{j} } \right]^{2} = \mathop{\sum}\nolimits_{j = 1}^{n} w\left( {x - x_{j} } \right)\left[ {p^{T} \left( x \right)a\left( x \right) - y_{j} } \right]^{2} $$(10)where, yj is the observed value. To the determining coefficient a (x) and minimize the sum of residuals. The derivative of Eq. (11) with respect to a can be obtained:
$$ \frac{\partial J}{{\partial a}} = a\left( x \right)A\left( x \right) - B\left( x \right)y = 0 $$(11)$$ W\left( x \right) = diag\left( {w_{1} \left( x \right),w_{2} \left( x \right), \ldots ,w_{n} \left( x \right),} \right) $$(12)It is the n-order diagonal matrix. Then A(x) can be written in matrix form as \(A\left( x \right) = p^{T} \left( x \right)\), \(W\left( x \right)p\left( x \right)\), which is an m-order symmetric matrix. B(x) can be written in matrix form as \(B\left( x \right) = p^{T} \left( x \right)W\left( x \right)\), which is an \(m \times n\)-order matrix. Finally, \(a\left( x \right) = p^{ - 1} \left( x \right)B\left( x \right)y\) can be calculated by matrix multiplication (Fig. 10).
Fig. 10. 
Layout diagram of retaining wall structure displacement monitoring points




5 Conclusion
By researching on the key technologies of joint scheduling and control of multi-cascade and multi-line ship lock group, we have successfully realized the joint dispatch of multi-level, multi-line and multi-owner lock groups in the main line and branch lines of the Xijiang River Basin, as well as the centralized control and unmanned lock. We have created a new “four unified” management mode of Xijiang River navigation. Since the joint scheduling of cascade locks in Xijiang River Basin, it has played the advantages of unified coordination and unified management. This has greatly improved the navigation efficiency and service level of the Xijiang River Lock and provided a reference for the innovation of other navigable river management modes in China.
References
Zhang M, Feng XX (2015) Study on traffic organization rules of Changzhou four parallel ship locks. J Waterw Harb 36(4):329–333
Zhang M, Li M, Feng XX et al (2012) Causes and countermeasures of traffic jam in Changzhou double line ship lock. J Waterw Harb 33(2):56–60
Zhang M, Hao YY, Feng XX et al (2014) Application of ship maneuvering simulation technology for shipping route selection near reach of dam area. J Waterw Harb 35(2):175–179
Hao YY, Xue J, Zhang M (2013) Research on navigation encounter mode of double-line ship lock. J Waterw Harb 34(6):513–517
Jiang MF, Zhang M, Liao P, Feng XX et al (2013) Study on the recent lock capacity of the Changsha Hub. J Waterw Harb 4:359–363
Kong Z, Liao P, Yang CH et al (2017) Analysis of ship lock operation and throughput capacity based on traffic simulation model. Hydro-Sci Eng 1:73–79
Human impact on river channel changes downstream of Changzhou hydro-junction on the Xi River (Xijiang), China. 36th IAHR
Lin XZ (2016) Research on visual management of traffic logistics GIS road network. Popular Sci Technol 18(012):6–8
Lin XZ (2016) Design of Beidou satellite navigation technology transfer service platform. Sci-Tech Dev Enterp 2016(12):23–26
Lin XZ, Tang Y, Pan X (2014) Beidou CORS navigation accuracy continuous monitoring and evaluation model. Chin Satell Navig Positioning Assoc 2014:5
Lin XZ, Pan Y, Luo HP (2010) Construction of unified information service for information system under next Generation Network environment. J Guangxi Acad Sci 26(02):167–170
Shi HP (2019) Research on intelligent Ship Service System based on Beidou. Sci-Tech Dev Enterp 2019(03):54–56
Yang Q (2016) Transportation logistics Internet of Things Beidou terminal research and development. Sci-Tech Dev Enterp 2016(10):22–24
Pan X (2014) Optimization of transportation logistics early warning image transmission based on GIS. J Hechi Univ 34(02):65–70
Lin N (2019) Pan QB (2019) Study on the buffer sailing scheduling model of cascade ship lock in river Basin. W Chin Commun Sci Technol 11:168–171
Huang HZ (2016) Design and implementation of ship lock alarm management system based on Beidou Navigation. Sci-Tech Dev Enterp 2016(06):30–33
Ning W (2015) Research and development of Beidou Satellite navigation monitoring terminal for ship networking. Sci-Tech Dev Enterp 2015(24):20–22+25
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Ning, W., Ye, H., Lin, N., Mo, Z. (2023). A Study on Key Technologies for the Joint Scheduling and Control of Multi-level and Multi-line Ship Lock Groups. In: Li, Y., Hu, Y., Rigo, P., Lefler, F.E., Zhao, G. (eds) Proceedings of PIANC Smart Rivers 2022. PIANC 2022. Lecture Notes in Civil Engineering, vol 264. Springer, Singapore. https://doi.org/10.1007/978-981-19-6138-0_65
Download citation
DOI: https://doi.org/10.1007/978-981-19-6138-0_65
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-6137-3
Online ISBN: 978-981-19-6138-0
eBook Packages: EngineeringEngineering (R0)