
Abstract
Through the method of physical model test, tests of ship navigating in the intermediate channel of the navigation structure of Longtan Hydropower Station were carried out to study the hydraulic characteristics, such as the water surface fluctuation in the ship chamber and the intermediate channel, the heave of ship bow and stern, and the mooring force of the berthing ship under different navigational conditions. The results indicate that from the perspective of ship lift operational efficiency, docking safety, ship navigating safety and berthing safety, the design navigable water depth of 3.6 m in the intermediate channel is reasonable and the navigational speed of the ship in the intermediate channel should not exceed 1.5 m/s. The research results can provide scientific basis and technical reference for the design and operation of the navigation structure of Longtan Hydropower Station.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Navigation structures of high dams mainly include ship lift and multistage ship lock (Li et al. 2014). In the construction of navigation structures for high dams and ultra-high dams, ship lift has been more and more applied in China because of its characteristics of fast operation speed, low investment and water saving (Hu et al. 2016). So far, several different types of vertical ship lifts have been built and operated in Geheyan, Yantan, Shuikou, Silin, Shatuo, Three Gorges, Jinghong, Xiangjiaba and other projects. When the working head of the hydropower station is higher, the multistage ship lift with intermediate channels can be adopted, for instance, the navigation structure of Goupitan Hydropower Station adopted three vertical ship lifts linked by two intermediate channels which has been put into trial operation (Chen et al. 2018).
The intermediate channel between ship lifts is an artificial channel that links multistage ship lifts and is used for the navigation of upstream and downstream ships. Its two ends are both closed, and the channel flow velocity is almost zero. Due to the limitation of engineering terrain conditions, the cross section scale of the intermediate channel is usually smaller than the requirements of restricted channel scale in navigation standard of inland waterway. It is a special restrictive channel. At present, there is no specification or standard for its scale design.
When ship navigates in the narrow closed channel in shallow water like the intermediate channel, its stern may sink obviously and even rub the bottom due to the blocking effect of the ship. And meanwhile, it produces a large surge wave. The surge wave will be reflected after being transmitted to the closed end, superimposed with the advancing surge wave, and oscillate back and forth in the intermediate channel and the ship chambers to form a complex long wave motion, which takes a long time to make the water surface stable. This kind of long wave motion of water flow has certain harm to ships in the intermediate channel, which will cause the ships to sway and shake, and has an adverse effect on the docking of the ship lift.
The navigation structure of Longtan Hydropower Station is a two-stage vertical ship lift with intermediate channel. The maximum lifting height of the two-stage ship lift is 62.4 m and 93.6 m respectively. The two-stage ship lift adopts fully balanced winch lifting system (Chen et al. 2020). The structure of the ship chamber is totally the same, the total length of the ship chamber is 88 m, and the design effective size is 73.0 × 12.2 × 3.5 m (length × width × water depth). The design navigable water depth of the intermediate channel is 3.6 m, and the size of the design ship is 68.0 m × 11.0 m × 2.4 m (total length × shaped width × design draft). In this paper, through the method of physical model test, the influence from the ship’s navigation in the intermediate channel between ship lifts on the hydraulic characteristics is studied, and the control standards such as the limit speed of the ship’s navigation in the intermediate channel is proposed.
2 Test Methods and Research Conditions
2.1 Physical Model Design
This paper mainly studies the characteristics of the water surface fluctuation in the intermediate channel and the ship chambers, the heave of the navigating ship, and the mooring force of the berthing ship, etc. Therefore, the model design does not consider the lifting equipment and the itinerary of the ship chamber, and only considers the actual water area between the two-stage ship lift of Longtan Hydropower Station. The actual water area between the two-stage ship lift includes the two ship chambers and the upper head of the first stage ship lift, aqueduct 3 one-way channel and other sections of the intermediate channel between the two-stage ship lift. The plane layout of the two-stage ship lift with intermediate channel of the navigation structure of Longtan Hydropower Station is shown in Fig. 1.
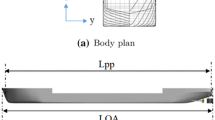
The prototype of the test ship is a 1000t-class single ship. One test ship is the navigating ship and the other one is the berthing ship. The ship model is mainly designed according to the gravity similarity criterion, and the geometric scale is consistent with the hydraulic physical model. In addition to meeting the size and linear geometry similarity of the ship model, the speed of ship model should be similar to that of the real ship, and the displacement of the ship model and the real ship should also be similar.

Plane layout of the two-stage ship lift with intermediate channel of the navigation structure of longtan hydropower station and the ship navigation starting point and direction
2.2 Measuring Point Arrangement and Measuring Method
In the test, the capacitance liquid level meter was used to measure the water surface fluctuation of the two ship chambers and the intermediate channel between the two-stage ship lift, and 24 measuring points were arranged, as shown in Fig. 1. The ultrasonic range finders ware fixed on the front and rear traction device to measure the heave of the navigating ship. The total station instrument measured the speed and distance of the ship navigation. The pressure sensors measured the mooring force of the berthing ship. The test data were automatically collected and preliminarily processed by a multi-channel high-speed data acquisition system.
2.3 Research Conditions
The navigation method of ships in the intermediate channel should ensure the safety of the ships and navigation buildings. On this premise, the navigating time should be shortened as much as possible to improve the passing efficiency. Therefore, the more reasonable navigation method is to navigate along the route with variable speed.
According to previous research, when the ship navigates out of the ship chamber, a large amount of water in the ship chamber is pushed out, which may cause the ship to rub the bottom, affecting the safety of the ship and the ship chamber, and also cause water surface fluctuations in the ship chamber and the intermediate channel, affecting the docking safety of the ship lift and the berthing safety of ship in the intermediate channel (Li et al. 2016). In addition, considering the factors of preventing the ship from collision with the side wall and stabilizing the course, the navigational speed of the ship entering and leaving the upper and lower heads and the aqueduct 3 one-way channel (the narrow section of the intermediate channel) should not be too high. It is therefore decided that the ship should navigate out of the ship chamber of the second stage ship lift (hereinafter referred to as “ship chamber 2”), the upper head and the aqueduct 3 one-way channel at the maximum speed of 0.6 m/s in the test to ensure safety. After the ship leaves the aqueduct 3 one-way channel, the ship navigates in the aqueduct 3 two-way channel, open channel 3 and other intermediate channel sections at the maximum navigational speed accelerating to 1.0, 1.5, 2.0, 2.5 and 3.0 m/s (high speed in the intermediate channel, hereinafter referred to as “high speed”).
There were two ship models in the test. One was towed by the traction system and navigated with variable speed in the ship chamber and the intermediate channel, and the other was berthed in the right ship berthing section on the upstream side of the second-stage ship lift (as shown in Fig. 1), and its mooring force was measured to analyze the influence from ship navigating in the ship chamber and the intermediate channel on the berthing conditions of the ship berthing in the intermediate channel.
At the same time, in the test, it is necessary to study the influence from ship navigation on the flow in the intermediate channel and the berthing conditions of the ship when the lower chamber gate of ship chamber of the first-stage ship lift (hereinafter referred to as “ship chamber 1”) is open (docking with the intermediate channel) or closed. In particular, it is necessary to measure the water level change outside the downstream gate of ship chamber 1, and analyze whether the water surface fluctuation affects the smooth docking of the first stage ship lift and its downstream intermediate channel. The test groups are shown in Table 1.
3 Water Surface Fluctuation in Intermediate Channel and Ship Chamber
The water level change at typical measuring points and the ship navigation distance with time under the condition that ship navigates at a high speed of 1.5 m/s in the intermediate channel in test group LZ1 are shown in Fig. 2. Table 2 shows the maximum water surface fluctuation at typical measuring points in different test groups.
Combining with the Fig. 1 and Table 2, due to the blocking effect of the ship, when the ship starts, a large amount of water in ship chamber 2 is pushed to the intermediate channel and ship chamber 1 during the ship navigation out of ship chamber 2, upper head of ship chamber 2 and aqueduct 3 one-way channel. The water level of ship chamber 2, ship chamber one-way channel, upper head of ship chamber 2 and aqueduct 3 behind the ship stern decreases, the ship stern sinks obviously and the ship may rub the bottom. The water level of aqueduct 3 two-way channel and its upstream intermediate channel and ship chamber 1 rises, but the amplitude of water surface rise is basically less than that of the water surface decline in upper head of ship chamber 2 and ship chamber 2. When the stern of the navigating ship navigates out of aqueduct 3 one-way channel and enters aqueduct 3 two-way channel, a large amount of water suddenly enters ship chamber 2, upper head of ship chamber 2 and aqueduct 3 one-way channel from the upstream side intermediate channel of aqueduct 3 one-way channel, and forms a relatively large surge wave. This kind of surge wave is reflected after being transmitted from the upstream end of aqueduct 3 one-way channel to the downstream end of ship chamber 2 and superimposed with the surge wave advancing from the upstream. Then the complex long wave motion is formed in the intermediate channel and the ship chambers, which takes a long time for the water surface to restore stability. In the process of ship navigation, aqueduct 3, open channel 2 and aqueduct1 have relatively small water surface fluctuation due to wide section size and large section coefficient.
The navigation structure of Longtan Hydropower Station is a two-stage vertical ship lift with intermediate channel. It is necessary to consider the influence of ship navigating from chamber 2 to the intermediate channel on the downstream docking of the first stage ship lift and the upstream docking of the second stage ship lift. If the water surface at lower head of the first stage ship lift fluctuates greatly and the water level difference between the inside and outside of the ship chamber gate is too large, it may be difficult to open the ship chamber gate for docking. When the water level outside the ship chamber gate is higher than that inside the ship chamber, a large amount of water in the intermediate channel will flow into the ship chamber after the ship chamber gate is opened. When the water depth outside the ship chamber gate is lower than that inside the ship chamber, a large amount of water in the ship chamber will flow out. The water flowing into or out of the ship chamber causes large changes in the weight of water and the longitudinal tilt torque in the ship chamber in a short period of time, which not only affects the operation efficiency of the ship lift, but also threatens the locking mechanism of the ship lift and the safety of navigation or berthing of ships in the ship chamber and the intermediate channel.
Referring to the design requirements of the Three Gorges ship lift, when the ship chamber gate is opened, the water level difference between the inside and outside of the ship chamber is required to be no more than 0.1m. During the docking process of the ship lift, the water surface fluctuation in the approach channel should be no more than 0.1 m too. Therefore, during the docking process of the Longtan ship lift, the water surface fluctuation at lower head of ship chamber 1 and upper head of ship chamber 2 can also be controlled by not more than 0.1 m.
From the process line of water level change and the maximum statistical value of the measuring point at the lower head of ship chamber 1, it can be seen that when the high speed of the navigating ship reaches 2.0 m/s or above, the maximum value of the water surface fluctuation at lower head of ship chamber1 exceeds 0.1 m which will adversely affect the downstream docking safety of the first stage ship lift. Therefore, in order to ensure the downstream safe docking of the first stage ship lift, the navigational speed of the ship in the intermediate channel should not exceed 1.5 m/s.
In the process of ship navigating from ship chamber 2 to the intermediate channel, the water surface decline value is greater than the rise value. The maximum water surface fluctuation at upper head of ship chamber 2 is greater than 0.25m. When the high speed is 1.0–1.5 m/s, the water surface fluctuation at upper head of ship chamber 2 is relatively small which is basically less than 0.1 m after about 15 min. When the high speed is greater than 2.0 m/s, the water surface fluctuation at upper head of ship chamber 2 needs to wait more than 40 min until it is less than 0.1 m. The greater the high speed is, the longer the waiting time for water surface to stabilize is, and the lower the operation efficiency of the ship lift is. Therefore, from the perspective of improving the safety and operation efficiency of the upstream docking of the second stage ship lift, the navigational speed of the ship in the intermediate channel should be lower than or equal to 1.5 m/s.

Process line of water level change and ship navigation distance with time
4 Heave of Ship Bow and Stern
When the ship navigates out of the ship chamber and navigates in the intermediate channel, the water flow pushed away by the forward process of the ship produces a blocking effect under the influence of boundary conditions. The water in front of the ship bow moves to the stern, forming a movement of water around the ship. This backflow movement of water is accompanied by a loss of velocity, resulting in a water level difference. The drawdown of the water level will cause the ship to sink. When the ship sinks a large amount and the water depth of the channel is insufficient, it may cause the ship to rub the bottom, which will have an adverse impact on the safety of the ship and the ship lift. Accordingly, it is necessary study the heave of the ship bow and stern during the ship navigation, so as to determine the reasonable channel water depth and ship speed limits.
The heave of ship bow and stern with ship navigation distance under the condition that ship navigates at a high speed of 1.5 m/s and 2.5 m/s in the intermediate channel in test group LZ1 are shown in Fig. 3. The maximum sinkage and minimum safety margin of the navigating ship and the corresponding ship navigation distance and position in different test groups are listed in Table 3.
The figure and table show that in the process of ship navigation, the ship sinkage value is greater than the rising value. When the high speed of the navigating ship is 1.0–2.0 m/s, the maximum sinkage of the ship occurs when the stern is still in the ship chamber 2, and the maximum sinkage is mainly affected by the speed of the navigating ship out of the ship chamber 2. In the test, the maximum navigational speed of the ship out of the ship chamber is 0.6 m/s, so the maximum sinkage of the ship is 0.27–0.29 m, and the minimum safety margin is 0.93–0.91 m, which is relatively close. When the speed of the sailing ship is 2.5–3.0 m/s, the maximum sinkage occurs when the ship stern is located in aqueduct 2, and the maximum sinkage is mainly affected by the high speed of the navigating ship. When the high speed is 2.5 m/s, the maximum sinkage is 0.43–0.53 m, the minimum safety margin is 0.78–0.67 m. And when the high speed is 3.0 m/s, the maximum sinkage is 1.08 m, the minimum safety margin is only 0.12 m.
In order to ensure the safety of ship navigation, the safety margin at the bottom of the 1000 t-class design ship with a draft of 2.4 m for the Longtan ship lift should not be less than 0.7 m. Therefore, considering that the minimum safety margin of the ship is 0.7 m, the navigational speed of the ship in the intermediate channel should not be greater than 2.0 m/s.

Process line of heave of ship bow and stern with ship navigation distance
5 Ship Berthing Condition
The complex long wave motion oscillates back and forth in the intermediate channel and ship chambers will cause the ships to sway and shake and may easily cause the ship’s mooring force to exceed the standard, which will do certain harm to the ships berthing in the intermediate channel and produce potential safety hazards.
The mooring force with time and ship navigation distance under the condition that ship navigates at a high speed of 1.5 m/s in the intermediate channel in test group LZ1 are shown in Fig. 4 and Fig. 5. The maximum mooring force of the berthing ship in different test groups are listed in Table 4.
From the analysis of the figures and table, it can be seen that the maximum longitudinal mooring force of the berthing ship is greater than the maximum lateral mooring force of the corresponding test condition. The maximum mooring force of the berthing ship basically increases with the increase of the high speed of the navigating ship, and the increase is more obvious when the high speed is greater than or equal to 2.0 m/s.
The design ship of the navigation structure of Longtan Hydropower Station is 1000t-class. The maximum limit value of longitudinal mooring force allowed by the code is 32 kN (GB 51177-2016, China), and the maximum limit value of lateral mooring force is 16 kN. Therefore, starting from controlling the mooring force of the berthing ship to meet the requirements of the code, the navigational speed of the ship in the intermediate channel should not exceed 1.5 m/s to ensure the safety of berthing ship in the intermediate channel.

Process line of mooring force and ship navigational distance with time

Process line of mooring force with ship navigation distance
6 Discussion on Ship Navigational Speed
According to the analysis of the above test results, the navigating process of the ship causes the water surface fluctuation in ship chambers and the intermediate channel, the heave of the navigating ship, and the mooring force change of the berthing ship in the intermediate channel. Considering these factors, the navigational speed control standard of the ship in the intermediate channel is discussed.
The process of ship navigation causes the water surface fluctuation in the ship chambers and the intermediate channel, which affects the safety and efficiency of the ship lift docking. From the perspective of docking safety, the water surface fluctuation of lower head of ship chamber 1 shall be less than 0.1m, and the high speed of the navigating ship in the intermediate channel should not be greater than 1.5 m/s. From the perspective of improving the efficiency of the upstream docking operation of the second stage ship lift, the high speed of the navigating ship in the intermediate channel should not exceed 1.5 m/s.
During the navigation of the ship, the stern of the navigating ship sinks obviously. In order to prevent the ship from rubbing the bottom, it is necessary to ensure that there is a certain safety margin at the bottom of the ship. From the perspective of ship navigation safety, the minimum safety margin at the bottom of the ship is 0.7 m, and the high speed of the navigating ship in the intermediate channel should not exceed 2.0 m/s.
The process of ship navigation causes the long wave motion in the intermediate channel and ship chambers which will do certain harm to the ship berthing in the intermediate. Considering the requirement that the mooring force of the berthing ship does not exceed the allowable limit of the code (the maximum allowable limit of longitudinal mooring force is 32 kN and the maximum allowable limit of lateral mooring force is 16 kN), the navigating speed of the ship in the intermediate channel should not be greater than 1.5 m/s.
In addition, after the navigating ship entering the intermediate channel, its acceleration also needs to be controlled. The speed increase should not be too fast, especially when there are berthed ships in the channel of the speed increase section.
7 Conclusions
Through the ship navigation test in the intermediate channel of the Longtan ship lift, this paper analyzes the variation characteristics of the water surface fluctuation, the heave of the bow and stern of the navigating ship, and the mooring force of the berthing ship in the intermediate channel. The influence of ship navigation on the docking of the ship lift, the navigating ship and the berthing ship is studied, and the navigational speed control standard of the ship in the intermediate channel is discussed.
Considering the operation safety and efficiency of the ship lift, the design navigable water depth of 3.6m in the intermediate channel is reasonable and the navigational speed of the ship in the intermediate channel should not exceed 1.5 m/s.
Under the conditions of the navigable water depth of 3.6 m in the intermediate channel, the maximum navigational speed of 0.6 m/s of the ship out of the ship chamber, and the high speed of 1.5 m/s of the ship in the intermediate channel, the maximum water surface fluctuation of the lower head of the first stage ship lift is 0.1m, and the water surface fluctuation of the upper head of the second stage ship lift is also less than 0.1 m after about 15 min. The maximum sinkage of the navigating ship is 0.27 m and the minimum safety margin is 0.94 m. The maximum longitudinal mooring force of the berthing ship in the intermediate channel is 28.4 kN and the maximum lateral mooring force is 6.4 kN. The research results can provide scientific basis and technical reference for the design and operation of Longtan ship lift.
References
Chen Y, Hu Y, Li Z, Fu L (2020). Comprehensive research on hydraulic characteristics of the second stage ship lift of Longtan. Port Waterway Eng 11:18–25, 70
Chen M, Zhang X, Xu G, Chen M (2018) Navigation structures type and run mode of Pengshui dam in Wujiang River. Port Waterway Eng 11, 85–90
Hu Y, Li Z, Li Y, Xuan G (2016) Research developments in the field of major ship lift in China. Port Waterw Eng 12:10–19
Li Z, Hu Y, Liu K (2016) Water depth standard for Xiangjiaba ship lift’s chamber. Port Waterw Eng 12:153–157
Li Y, Liu J (2014). Analysis of navigational speed and channel scale and test of navigation conditions in the intermediate channel between ship lifts of Baise Power Station. J Waterw Habor 4:393–398
Ministry of Water Resources of the People’s Republic of China. (2016). Design code for shiplift GB 51177-2016, p 27
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Chen, Y., Hu, Y., Li, Z. (2023). Research on Influence from Ship Navigating in the Intermediate Channel Between Ship Lifts on Hydraulic Characteristics. In: Li, Y., Hu, Y., Rigo, P., Lefler, F.E., Zhao, G. (eds) Proceedings of PIANC Smart Rivers 2022. PIANC 2022. Lecture Notes in Civil Engineering, vol 264. Springer, Singapore. https://doi.org/10.1007/978-981-19-6138-0_52
Download citation
DOI: https://doi.org/10.1007/978-981-19-6138-0_52
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-6137-3
Online ISBN: 978-981-19-6138-0
eBook Packages: EngineeringEngineering (R0)