
Abstract
The mounting clearance and deformation of the mechanical synchronization system of the HFSL directly affects the attitude of ship chamber, especially the longitudinal tilt of the ship chamber. In this paper, a generalized model is established to derive the analytical solution of the longitudinal tilt of the ship chamber according to the kinetic equations and differential equation theory of the rigid body with fixed axis rotation, and to reveal the mechanism of the longitudinal tilt of the ship chamber. According to the moment balance equation, the design conditions of the synchronous shaft rigidity of the HFSL are obtained. In addition, a mathematical model is established to simulate the change process of the longitudinal tilt of the ship chamber and analyze its variation characteristics.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
- HFSL
- Mechanical synchronization system
- Longitudinal tilt of ship chamber
- Mechanism
- Change characteristics
1 Introduction
HFSL and rope winch vertical ship lift (RWSL) are the same in the following aspects: the ship chamber lifted through wire rope suspension, in the process of operation, the ship chamber will be inevitably subject to many unbalanced load. Local instability caused by unbalanced load resulting in the ship chamber deviated from the balance position, and then lead to the flow of the water in the ship chamber. The shift of the water gravity center extra imposed on the ship chamber a capsize moment, so that the amount of tilt of the ship chamber increased, and boost the water further flow, resulting in the tilt of the ship chamber continue to enlarge. If there is no sufficient anti-tilt moment, it will eventually lead to safety accident.
For the RWSL, the closed-loop mechanical synchronization system forces each winding drum to run synchronously which ensures each lifting point of the ship chamber lift almost synchronously. The system of “motor- synchronous shaft- winding drum” is equipped with reducer to realize the transmission, see Fig. 1. In the process of operation, the synchronous shaft mainly bears the additional torque generated by the unbalanced output of the motor, or when a driving motor or the main dragging equipment fails, the strength of the synchronous shaft is sufficient to transmit the rated output torque of a motor and maintain the synchronous lifting of each lifting point.

Schematic diagram of mechanical synchronization system of RWSL
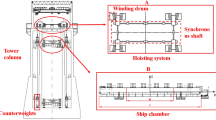
HFSL is driven by water energy and the structure of its mechanical synchronous system without motor and reducer, which is a closed-loop structure directly connected by synchronous shaft to each winding drum in series, using synchronous shaft rigidity to guarantee the synchronous rotation of winding drums, seen Fig. 2. Once the ship chamber is subjected to unbalanced load and starts to tilt, the winding drums rotates in sequence from upstream to downstream, producing a cumulative effect. Due to the installation gap between synchronous shafts and winding drums, there is no force on the synchronous shaft at the beginning. The relative rotation between the winding drums only eliminates the installation gap, then the drums become truly rigidly connected through the synchronous shafts, and the rigidity of the synchronous system comes into play to produce torsional deformation to resist the tilting moment of the ship chamber.

Schematic diagram of mechanical synchronization system of HFSL
In summary, for RWSL, the mechanical synchronization system can eliminate the installation gap through the motor preload, and the deformation produced by the synchronous shaft under the action of torque is reduced substantially through the reducer and then transferred to the ship chamber by winding drums. Thus, the installation gap of the mechanical synchronization system and the synchronous shaft torsional deformation have less influence on the ship chamber tilt. However, the installation gap of mechanical synchronous system and synchronous shaft torsional deformation of HFSL are directly reflected to the longitudinal tilt of the ship chamber. The longitudinal tilt is more sensitive to the installation gap and synchronous shaft rigidity, which directly affects the safe operation of the ship lift. If the synchronous shaft rigidity is large enough, the tilt of the vessel converges, otherwise the ship chamber will be overturned (Fig. 3).

Mechanical synchronization system transmission mechanism
2 Generalized Model of Mechanical Synchronization System of HFSL
The mechanical synchronization system of HFSL is a hyper-static structure and it is difficult to determine the torque of each synchronous shaft by static balance condition. Therefore, a generalized model of mechanical synchronization system is established for analysis, and the most unfavorable situation that the load is concentrated on either end of synchronous shaft is considered.
Assume that the ship chamber is a rigid body, the left and right sides of synchronous axis is completely symmetrical and the influence of the modulus of elasticity of the wire rope is ignored. The force on synchronous axis is shown in Fig. 4. The tension of the ship chamber are \(F_{1}\) and \(F_{2}\), side tension of balance weight are \(F_{1}^{^{\prime}}\) and \(F_{2}^{^{\prime}}\). When the ship chamber is in the ideal horizontal state, the ship chamber and water load gravity center is in the center. The load acting on each lifting point is equal (\(F_{1} = F_{2}\)). But when the ship chamber is tilted, gravity center of the water load on the ship chamber will shift which leading to a overturn moment, and the synchronous shafts would produce a torque to resist chamber tilting.

Generalized model of mechanical synchronization system and ship chamber
3 Design Condition of Synchronous Shaft Torsional Rigidity
The relative rotation angle of the winding drums caused by the installation gap of the mechanical synchronization system is defined as \(\theta_{{\text{a}}}\), the longitudinal tilt of the ship chamber is defined as \(\Delta h_{{\text{a}}}\), the relative rotation angle of the reel caused by the torsional deformation of the synchronous shaft is defined as \(\theta_{{\text{b}}}\), the longitudinal tilt of the ship chamber is defined as \(\Delta h_{{\text{b}}}\).
The relative rotation angle \(\theta\) of the winding drums at both ends of the longitudinal synchronous shaft is as follows:
The total tilt of ship chamber \(\Delta h\) is as follows:
The moment analysis is carried out with the ship chamber as the object of study, and the moment of force on the ship chamber consists of two parts:
-
1)
Overturning moment of the water on the ship chamber \(M_{{\text{G}}}\)
$$ M_{{\text{G}}} = 2\int_{0}^{L/2} {\rho gB\frac{\Delta h}{L}x^{2} dx\left( {1 + {\text{k}}} \right)} = X \cdot \Delta h\left( {1 + {\text{k}}} \right) $$(3)In which, \({\text{X}} = \frac{1}{12}\rho gBL^{2}\), \(B\) is the width of ship chamber, \(L\) is the length of ship chamber, \(k\) is the amplification factor of dynamic water moment in the chamber which reflects additional effect on the force of moment by the acceleration of the water and water surface fluctuation in the chamber.
-
2)
Ship chamber anti-tilt moment \(M_{{\text{K}}}\)
$$ M_{{\text{K}}} = M_{{\text{I}}} { + }M_{B} { = }2\frac{{\Delta h_{{\text{b}}} }}{{R^{2} \frac{L}{{GI_{{\text{p}}} }}}}{\text{L}} + Y\Delta h\left( {1 + q} \right) $$(4)$$ M_{{\text{I}}} = 2\frac{{\Delta h_{{\text{b}}} }}{{R^{2} \frac{L}{{GI_{{\text{p}}} }}}}{\text{L}} $$(5)$$ M_{B} = Y\Delta h\left( {1 + q} \right) $$(6)In above formula, \(M_{{\text{I}}}\) is the anti-tilt moment generated by synchronous shaft, \(I_{{\text{P}}}\) is the cross-sectional polar inertial moment of synchronous shaft, \(G\) is the shear modulus of synchronous shaft, \(R\) is the radius of reel, \(M_{B}\) is the anti-tilt moment, \({\text{Y}}\) is balance weight static anti-tilt moment \({\text{Y}} = \tau X\), \(\tau\) is the balance weight anti-tilt coefficient which is related to bottom area of balance weight and lifting point position. \(q\) is amplification factor of vertical shaft water surface fluctuation on the static anti-tilt moment of balance weight, reflecting the additional effect of vertical shaft water surface fluctuation.
According to the ship chamber longitudinal moment convergence condition, the anti-tilt moment should be greater than the tilt torque generated by the water in the ship chamber before the ship chamber reaches the maximum permissible tilt.
According to above formula, the design condition of synchronous shaft rigidity is as follows:
4 Analytical Solution of Longitudinal Tilt of Ship Chamber
The analytical solution of the tilt amount of ship chamber can be derived from the kinetic equations for the fixed-axis rotation of a rigid body. Define \(I\) as the rotational inertia of the chamber (the center of the line connecting the two longitudinal lifting points of the ship chamber is the axis of rotation), \(\varphi\) is the longitudinal tilt angle of ship chamber, \(\ddot{\varphi }\) is the angular acceleration of the ship chamber longitudinal ends of the rotation.
The relation between \(\theta\) and \(\varphi\) is:
-
1)
When \(\theta < \theta_{{\text{a}}}\), \(X\Delta h\left( {1 + k} \right) - {\text{Y}}\Delta h\left( {1 + q} \right) = I\ddot{\varphi } = I\left( {\Delta h/L} \right)^{\prime \prime }\), the formula can be simplified to
$$ \Delta h^{\prime\prime} - \left[ {X\left( {1 + k} \right) - Y\left( {1 + q} \right)} \right]\frac{L}{I}\Delta h = 0 $$(10)General solution of above homogeneous equation is:
$$ \Delta h = \frac{{\omega_{0} L}}{2\alpha }e^{\alpha t} - \frac{{{\upomega }_{0} L}}{2\alpha }e^{ - \alpha t} $$(11)In which, \(\alpha = \left\{ {\left[ {X\left( {1 + k} \right) - Y\left( {1 + q} \right)} \right]\frac{L}{I}} \right\}^{1/2}\), \(\omega_{0}\) is the initial disturbance angular velocity.
-
2)
When \(\theta > \theta_{{\text{a}}}\),\(X\Delta h\left( {1 + k} \right) - Y\Delta h\left( {1 + q} \right) - 2\frac{{\Delta h_{{\text{b}}} }}{{R^{2} \frac{L}{{GI_{{\text{p}}} }}}}L = I\ddot{\varphi } = I\left( {\Delta h/L} \right)^{\prime \prime }\), the formula can be simplified to
$$ \Delta h^{\prime\prime} + \frac{L}{I}\left[ {\frac{{2GI_{{\text{p}}} }}{{R^{2} }} + Y\left( {1 + q} \right) - X\left( {1 + k} \right)} \right]\Delta h = \frac{{2GI_{{\text{p}}} L}}{{R^{2} I}}\Delta {\text{h}}_{{\text{a}}} $$(12)
General solution of above equation is
In which, \({\Omega } = \left\{ {\frac{L}{I}\left[ {\frac{{2GI_{{\text{p}}} }}{{R^{2} }} + Y\left( {1 + q} \right) - X\left( {1 + k} \right)} \right]} \right\}^{\frac{1}{2}}\), \(C = \frac{{2GI_{{\text{p}}} L}}{{R^{2} I}}\Delta {\text{h}}_{{\text{a}}}\), \(t_{{\text{a}}}\) is the time to eliminate the installation gap, \(m = \theta_{{\text{a}}} R\), \(n = \frac{{\omega_{0} L}}{2}e^{{\alpha t_{{\text{a}}} }} + \frac{{\omega_{0} L}}{2}e^{{ - \alpha t_{{\text{a}}} }}\).
According to the above derivation, in the process of elimination of synchronous shaft rotation gap (\(\theta < \theta_{{\text{a}}}\)), the tilt amount of the ship chamber (\(\Delta h\)) is a hyperbolic sine function of t increasing monotonically. After the synchronous shaft rotation gap eliminated (\(\theta > \theta_{{\text{a}}}\)), the basic form of the equation is the forced motion of spring type, which reflects the forced torsional vibration of the “synchronous shaft system with suspended ship chamber and balance weight”. \({\Omega }\) is the inherent frequency of the torsional vibration of the system, which is related to the synchronous shaft rigidity, the arrangement type of the ship chamber and balance weight, etc.
5 Characteristics of the Longitudinal Tilt of the Ship Chamber
Relying on a HFSL engineering machinery synchronization system and the characteristic dimensions of the ship chamber, 3D numerical simulation is carried out. Calculation parameters are shown in the Table 1.
The process lines of the longitudinal tilt amount of the ship chamber with time are shown in Fig. 5. The change law of the longitudinal tilt of the ship chamber is as follows:
-
1)
The torsional rigidity of synchronous shaft meets the design requirements, then the longitudinal tilt of the ship chamber converges.
-
2)
During the elimination process of the synchronous shaft rotation gap, the longitudinal tilt of the ship chamber increases monotonically.
-
3)
After the synchronous shaft gap is eliminated, the longitudinal tilt of the ship chamber oscillates and decays slowly at the balance position of the longitudinal moment of the ship chamber.
-
4)
After the mounting gap is completely eliminated, the longitudinal tilt of the ship chamber can be expressed as the superposition of two different frequencies of the trigonometric functions. The longitudinal tilt of the ship chamber contains two dominant frequencies: one is in the mounting gap elimination moment, there is a high frequency vibration with a circular frequency of about 5.5rad/s which reflects the inherent frequency of the system torsional vibration. Due to the large damping created by inertia of the water in the ship chamber, it decays quickly. The other is the circular frequency of about 0.2rad/s of low frequency vibration.

Convergence of ship chamber longitudinal tilt
By analyzing the low frequency, the ship chamber is in the equilibrium position after stabilization, the fluctuation period is about 30s, converted into a circular frequency of 0.20 rad/s. Ship chamber can be regarded as a rectangular container. Self-oscillation circular frequency of water in a rectangular container has the analytical solution of:
In which, \(a\), \(b\), \(h\) are the length, width and depth of the water in the vessel, g is the acceleration of gravity. \(i\) and \(j\) are integers greater than or equal to zero, by taking different values, the longitudinal m-order self-oscillation circular frequency and the transverse n-order self-oscillation circular frequency of the liquid in the vessel can be calculated. The longitudinal first-order self-oscillation circular frequency of the water body in the vessel is 0.21 rad/s by substituting the dimension of the water body in the vessel, which is basically the same as the longitudinal tilting circular frequency of the vessel calculated by the numerical model in this paper. The low frequency reflects the longitudinal first-order self-oscillation frequency of the water body in the vessel. Due to the inability to accurately simulate the effects of system damping and water viscosity in the mathematical model, the decay is very slow. The sway of the water body decays much faster in the actual project.
Changing the calculation parameters by only reducing the synchronous shaft torsional rigidity, the longitudinal tilt change is investigated under the conditions of insufficient synchronous shaft rigidity by setting the synchronous shaft torsional rigidity \(K = 0.5 \times {10}^{{3}} {\text{kN}} \cdot {\text{m/rad}}\). The calculation results show that if the torsional rigidity of the synchronous shaft is not enough, the tilt of the vessel diverges rapidly. The change process of synchronous shaft torque and ship chamber tilt under two working conditions is shown in Fig. 6. It shows that the synchronous shaft torque is zero before the gap is eliminated, and after the gap is eliminated, if the synchronous shaft rigidity is insufficient, the torque will increase sharply, and then will cause the synchronous shaft fracture damage; if the synchronous shaft rigidity is sufficient, the synchronous shaft torque and ship chamber tilt gradually converge and stabilize.

Characteristics of ship chamber tilt and synchronous shaft torque variation
6 Conclusions
The conclusion of this paper is as follows:
-
1)
The installation gap and synchronous shaft rigidity of the mechanical synchronization system of the HFSL directly affect the longitudinal tilt of the ship chamber. The design condition of synchronous shaft rigidity is \(K = \frac{{GI_{p} }}{L} > \frac{{[X(1 + k) - Y(1 + q)]R^{2} }}{{2L\left( {1 - \frac{{\Delta h_{{\text{a}}} }}{{\left[ {\Delta h} \right]}}} \right)}}.\)
-
2)
The change of the longitudinal tilt of the HFSL ship chamber is divided into two stages. During the mechanical synchronous system installation gap elimination process, the longitudinal tilt of the ship chamber is a hyperbolic sine function of time, monotonically increasing; after the synchronous shaft installation gap eliminated, the change of the longitudinal tilt of the ship chamber is expressed as the superposition of two different frequency triangular functions, the high frequency vibration reflects the inherent frequency of synchronous shaft torsional vibration, the low frequency vibration reflects the longitudinal first order self-oscillation frequency of the water body in the ship chamber. Due to the influence of system damping and water body viscosity, the oscillation amplitude gradually decaying, and finally stabilizing in the ship chamber moment balance position.
References
Shu X (2017) Hydraulics of hundred-meter scale hydro-floating ship lift. Doctor thesis, Hohai University
Lamb H (1992) Theoretical fluid dynamics. The Science Press, Beijing
Su TC, Kang SY (2015) Numerical simulation of liquid sloshing. In: Engineering mechanics in civil engineering. ASCE, pp 1069–1072
Bogaers AEJ, Kok S, Reddy BD, Franz T (2016) An evaluation of quasi-Newton methods for application to FSI problems involving free surface flow and solid body contact. Comput Struct 173(C):71–83
Su Y, Liu ZY (2016) Numerical model of sloshing in rectangular tank based on boussinesq-type equations. Ocean Eng 121:166–173
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Xue, S., Hu, Y., Li, Z., Jin, Y. (2023). Mechanism and Variation Characteristics of Longitudinal Tilt of Ship Chamber of Hydro-Floating Ship Lift (HFSL). In: Li, Y., Hu, Y., Rigo, P., Lefler, F.E., Zhao, G. (eds) Proceedings of PIANC Smart Rivers 2022. PIANC 2022. Lecture Notes in Civil Engineering, vol 264. Springer, Singapore. https://doi.org/10.1007/978-981-19-6138-0_44
Download citation
DOI: https://doi.org/10.1007/978-981-19-6138-0_44
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-6137-3
Online ISBN: 978-981-19-6138-0
eBook Packages: EngineeringEngineering (R0)