
Abstract
In inland ports, where access is done navigating along an estuary, river or artificial canal, the operation may be strongly conditioned by the tide (in case it has enough wide run) or the water level in the river. The variations in water level imply restrictions on the draft of the vessels that can access such ports.
Siport21 has been working for several years in ports of these characteristics, where there is no possibility to dredge the inland waterway. The alternative is to develop synchronization analysis tools, which allow identifying the “operational windows” and maximizing the draft of the vessels in transit operations. The result takes advantage of the tidal run by means of adequate planning, so that there is always enough underkeel clearance safety margin.
Grounding risk estimation is elaborated applying Monte Carlo method. A failure (grounding) function is defined, considering the propagation of the tidal wave (water level and current), ship speed along the waterway, wind conditions, squat, and other variables. Probability distributions of all variables involved are considered, so that thousands of random navigation conditions can be simulated. This allows to estimate the failure probability.
This methodology is applied to a practical case of a port that is carrying out actions to improve and optimize its operations. To do this, AIS data and tide data along the entire waterway, obtained from measurement sensors and a calibrated numerical prediction model, have been used.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The objective of the paper is to present the methodology used to determine the risk of contact with the bottom in the access and exit navigations to the inland port. With this aim, a model for calculating the probability of contact with the bottom during an individual transit has been created. The maximum permissible contact probability for each type of operation can be established from the acceptable global risk in this failure mode for the entire design lifetime of the port.
The model obtains the grounding probabilities of individual operations, so that they can be compared with previously established limit values. Several fundamental factors are involved in the calculations to consider:
-
ship type
-
speed
-
tidal wave propagation
-
synchronization with tidal wave
-
bathymetry
-
squat
-
climate conditions
The risk model serves as a tool for optimizing the maximum draft allowed in port access and exit maneuvers.
2 Input Variables
2.1 Water Level and Current
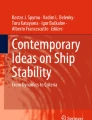
The port has developed a very precise mathematical model to obtain predictions of water levels and currents throughout the waterway. During the navigation simulation of the ships, the tide and current curves allow to know precisely both the water level available and the current (intensity and direction) at any time and position of the ship. In this work, five tidal ranges are studied, corresponding to exceedance probabilities of 20%, 40%, 60%, 80% and 100% (Fig. 1).

Water level and current tidal waves (time-distance graphs)
2.2 Bathymetry
To obtain the total water column, it is necessary to know the depth of the waterway. The Port Authority has provided detailed bathymetric data obtained during measurement campaigns carried out on a scheduled basis for the maintenance of the waterway. From these bathymetric data, the profiles of the river sections along the different kilometer points are obtained (Fig. 2).

3D bathymetry and example sections
2.3 Ship Type
The type of the ship is a very important factor since, depending on U or V hull forms, the squat will vary significantly. In the project, ships are classified into three types, according to the block coefficient assigned to ship classes: cruise ship, container ship and bulk carrier. Types and main particulars of the ships studied have been obtained from AIS traffic data provided by the port, so that the usual types and dimensions were described (Table 1).
2.4 Speed
Navigation speed is critical in the simulation, as it determines the position of the ship on the waterway at any time. With position and time, both water level and current acting on the ship are obtained from the prediction model. The speed, intensity and direction of the current are fundamental parameters to compute ship squat. Depending on the water level, navigation is carried out with a different speed profile. These speed profiles are obtained from the provided AIS traffic data (Fig. 3).

Average speed profiles for different tide level steps
2.5 Environmental Conditions
The risk model includes the probability distributions for different climate agents, including joint distribution of wind and waves outside the estuary, wind distribution at the estuary and wind distribution in the interior zone. These distributions are used to generate random environmental conditions that are used in the Monte Carlo simulations (Fig. 4).

Wind and wave distribution roses
3 Squat Estimation
To obtain a precise enough estimate of squat, calculations are made using empirical formulations and these calculations are compared with the results of simulations carried out using a numerical panel model. This comparison of results provides higher reliability and quality to the empirical estimates. The results of the numerical model are taken as a reference to correct the results of the empirical formulations because it is a more reliable and less conservative calculation method. All calculations are made for the three ship types listed above.
3.1 Empirical Calculations
Squat calculation through empirical formulations is carried out following the methods described in PIANC report No. 121-2014 “Harbour Approach Channels. Design Guidelines”. This document recommends empirical formulas for squat prediction, suitable for several types of ships and channels. The different formulations for estimating the maximum squat presented in PIANC report analyzed are: Tuck (1966), Huuska/Guliev (1976), Barrass3 (2004), Yoshimura (1986) and Römisch (1989) (Table 2).
3.2 Numerical Calculations
The numerical model used, based on a potential panel method, allows obtaining the forces and moments generated on a ship sailing along a restricted channel. In this way, from the hydrodynamic interaction forces and moments between sailing ships and the environment (bathymetry, slopes, confinements, …) it is possible to assess the suction and repulsion forces and, therefore, the sinkage and trim of ships. The model considers the specific hull shape of each ship, in a given load condition, as well as representative channel cross sections and allows the calculation of the hydrodynamic interaction (Fig. 5).

Numerical model panel example
3.3 Calculation Results
Five sections of the waterway are chosen to make the comparison between empirical and numerical calculations. The sections are chosen to cover the three generic navigation channel typologies (U, R and C) and both symmetric and asymmetric sections are analyzed. The following figure shows the comparison of results obtained with empirical formulations (color bars) and numerical model (black dot) for one of the sections. The x-axis shows first water relative navigation speed in knots, critical speed in knots, h/T ratio, and finally Cb (Fig. 6).

Example of squat estimation results
The formulations with the highest stability in terms of deviation from numerical calculations are Tuck and Huuska/Guliev. It is proposed to use the Huuska/Guliev formulation, since it is somewhat simpler than Tuck’s. The previous results allow to obtain correction coefficients for Huuska formulation depending on the section and ship type.
3.4 Full Scale Measurements
In order to validate the squat estimation method described, full scale squat measurements were conducted during a complete navigation onboard a container ship. Next table shows the main particulars of the vessel (Table 3).
The instrumentation consisted of a GPS unit with RTK precision (2 cm) for linear position (in plan and vertical) and an IMU for angle measurement. Next figure shows the instrumentation used (Fig. 7).

Measurement instrumentation
The following plots show speed recorded by GPS, tide level during navigation as well as roll and pitch angles (Fig. 8):

Speed, Tide level and angles during navigation
The maneuver included an intermediate stop at a deeper section to let the low tide pass safely, therefore, a step in tide level can be found in the left plot. The following plot shows the comparison of the vertical movement recorded by GPS (zero reference was set at zero speed) and the squat estimate for the navigation (Fig. 9).

Comparison of measured and estimated Squat
The previous plot shows that squat profile in general follows the speed profile as expected. There are some sections in which the difference between measurements and estimation reaches about 0.2 m, but in general the estimation is very close to the measurements. Risk estimations were carried out with a squat calibration based on previous data.
4 Risk Estimation
4.1 Acceptable Risk and Probability
Admissible risk is expressed by the probability of a failure occurring during the design lifetime of the facility. The following table shows admissible risk levels depending on the consequences of the failure (Table 4):
Considering the type of operations carried out in this case, the allowable risk level is set at 0.5 (low economic impact in case of grounding in soft bottom together with limited risk of victims). To obtain the admissible probability of failure in a single transit, it is necessary to establish the return period, or design lifetime that must be considered in the application of the admissible risk level. The following table shows the recommended return periods depending on the type of channel, the type of bottom and the risk of human life loss (Table 5):
In the case of the analyzed port, the navigation channel is general type, with soft bottom and low risk of human losses and environmental damage (E1). Therefore, the recommended return period is 25 years. As indicated above, the risk level is associated with the probability of an accident or failure occurring during the complete lifetime, in this case 25 years. The relationship between this overall probability and the probability of a bottom contact occurring during an individual operation is obtained using the long-term Poisson distribution:
where,
PUKC: Failure probability in the return period considered
YL: Return period
NY: Operations per year
PP: Failure probability per transit
Solving \({P}_{P}\) from the previous equation, we obtain:
Expression by which the maximum admissible probability for an operation can be obtained.
AIS data statistical analysis allows to obtain the acceptable probability value of 0.0001 (1*10–4).
4.2 Failure Probability Estimation
To obtain the probability of contact with the bottom due to vertical ship movements, the probabilistic method is used through Monte Carlo simulations. In this method, a failure function is defined, which depends on a series of variables with random variability. Once the behavior of this randomness of the variables is known, a series of simulations is carried out for the failure function, introducing random values in the variables based on their known probability distribution functions. In this case, two failure modes are considered, therefore two failure functions are defined: UKC and maneuver (sailing outside the channel) failures.
The UKC failure function (bottom contact) used is defined as follows:
where,
\(\overline{UKC(PK,1\dots N)}=\) Under Keel Clearance, in m
\(\overline{H(PK,1\dots N)}=\) Channel depth, in m
\(\overline{TL(PK,1\dots N)}=\) Tide level, in m
\(\overline{T(PK,1\dots N)}=\) Ship draft, in m
\(\overline{Sq(PK,1\dots N)}=\) Ship squat, in m
\(\overline{HEE\left(PK,1\dots N\right)}=\) Environmental agents and heading effects
\(PK=\) Distance (km)
\(N=\) Number of random simulations.
This failure function (UKC) depends on five main variables (H, TL, T, Sq and HEE), which at the same time are a function of other variables. These variables will have a statistical distribution which must be defined to perform the random simulations of the Monte Carlo method.
The manoeuvre failure function (grounding because of exceeding channel width) is defined as follows:
where,
\(\overline{WC(PK,1\dots N)}=\) Width clearance, in m
\(\overline{AW(PK,1\dots N)}=\) Available width, in m
\(\overline{OW(PK,1\dots N)}=\) Occupied width, in m
\(PK=\) Distance (km)
\(N=\) Number of random simulations.
The available width AW(PK, 1…N) includes the effect of the randomness of all the variables of UKC failure mode, therefore this variable depends on the variables of UKC failure mode.
On the other hand, the occupied width OW(PK,1…N) depends on environmental variables, navigation speed and ship maneuverability variables. The influence of the maneuverability variables is obtained through previous calculations applying SHIPMA autopilot maneuvering software. These calculations were calibrated with maneuvers carried out in SIPORT21 Real Time Bridge Simulator. The following figure illustrates the definitions of both failure functions. The available width and UKC in two sections of the river for the lowest point of the ship during navigation can be appreciated (Fig. 10).

Example of available UKC and width during navigation
5 Results
Navigation simulations were carried out varying the synchronization with the tide, from 2 h before high tide (HT−2) at the beginning of the manoeuvre to 0.5 h after high tide (HT+0.5). This allows to assess the operational windows. The following figures show different ship trajectories over the tide wave, depending on synchronization with high tide (red indicates high water level, blue indicates low water level) (Fig. 11).

Example of trajectories over tide wave for access (left) and exit (right) operations
The model obtains the failure probability for each case considered (ship, tide range and tide synchronization). As an example, next table shows results for access operations. Cases in which probability is lower than the limit are highlighted in green and in red if the probability is higher (excessive risk) (Table 6).
This allows to detect the safe combinations of ship type-draft-tidal range and the most adequate planning of the access transit (when to start the maneuver in order to keep safe UKC margins).
6 Conclusions
Applying the methodology developed it is possible to obtain the following information about operations in the river:
-
Maximum acceptable failure probabilities for each operation
-
Failure probability for access and exit operations for a specific vessel type and draft
-
Operational windows (relative to high water)
-
Water level along the waterway
-
Squat along the waterway
-
UKC available along the waterway
-
Critical points (km) in which failure occurs.
All this information makes possible to establish the maximum access and exit drafts based on the tide level (forecasted every day). To achieve this, it is necessary to have available a tool for predicting the tidal wave propagation along the waterway (time-distance curves). The port studied has developed such tool, validated with water level and current measurements. It is also necessary to elaborate a squat estimate with adequate precision, validated by field measurements on board ships during operations.
On the other hand, in access channels with soft and changing bottoms, as in this case, a precise and updated knowledge of navigation channel bathymetry allows the optimization of maximum access and exit drafts. These values can be kept up-to-date in case of getting new bathymetric data periodically.
Finally, the methodology also provides information about critical sections, which is a very relevant indication for the maintenance of the waterway.
References
Albers T, Reiter B, Treuel F (2018) Measurement and analysis of ship’s squat on the river Elbe, Germany
Briggs M, Debaillon P (2014) Comparisons of PIANC and numerical ship squat predictions for rivers Elbe and Weser
Harkin A, Harkin J, Suhr J, Tree M, Hibberd W, Mortensen S (2018) Validation of a 3D underkeel clearance model with full scale measurements
PIANC (1997) Approach channels. A guide for design
PIANC (2014) Harbour approach Channels design guidelines
Puertos del Estado (2000) ROM 3.1-99 proyecto de la configuración marítima de los puertos; Canales de Acceso y Áreas de Flotación
Verwilligen J, Marc Mansuy M, Vantorre M, Eloot K (2018). Full-scale measurements to assess squat and vertical motions in exposed shallow water
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Carmona, J.C., Atienza, R., Redondo, R., Iribarren, J.R. (2023). Grounding Risk Estimation in Inland Navigation with Monte Carlo Simulations and Squat Estimation. In: Li, Y., Hu, Y., Rigo, P., Lefler, F.E., Zhao, G. (eds) Proceedings of PIANC Smart Rivers 2022. PIANC 2022. Lecture Notes in Civil Engineering, vol 264. Springer, Singapore. https://doi.org/10.1007/978-981-19-6138-0_38
Download citation
DOI: https://doi.org/10.1007/978-981-19-6138-0_38
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-6137-3
Online ISBN: 978-981-19-6138-0
eBook Packages: EngineeringEngineering (R0)