
Abstract
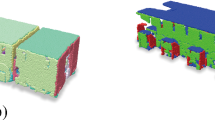
3D map building is a complex robotics task which needs mathematical robust models. From a 3D point cloud, we can use the normal vectors to these points to do feature extraction. In this paper, we will present a robust method for normal estimation and unconstrained 3D-mesh generation from a not-uniformly distributed point cloud.
Chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
References
Thrun, S., Burgard, W., Fox, D.: A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping. In: Proc. of the IEEE International Conference on Robotics and Automation, ICRA (2000)
Thrun, S., Hähnel, D., Ferguson, D., Montemerlo, M., Triebel, R., Burgard, W., Baker, C., Omohundro, Z., Thayer, S., Whittaker, W.: A System for Volumetric Robotic Mapping of Abandoned Mines. In: Proceedings of the IEEE International Conference on Robotics and Automation, ICRA (2003)
Surmann, H., Nuchter, A., Hertzberg, J.: An autonomous mobile robot with a 3D laser range finder for 3D exploration and digitalization of indoor environments. Robotics and Autonomous Systems 45, 181–198 (2003)
Saez, J.M., Escolano, F.: A Global 3D Map-Building Approach Using Stereo Vision. In: Proceedings of IEEE International Conference on Robotics and Automation, ICRA (2004)
Besl, P., McKay, N.: A method for registration of 3-d shapes. IEEE Trans. On Pattern Analysis and Machine Intelligence 14, 239–256 (1992)
Cazorla, M., Fisher, B.: Characterizing local minima in 3d registration methods. Not yet published (2004)
Page, D.L., Sun, Y., Koschan, A.F., Paik, J., Abidi, M.A.: Normal vector voting: crease detection and curvature estimation on large, noisy meshes. Graphical Models, Special Issue on Larte Triangle Mesh Models 64, 199–229 (2002)
Medioni, G., Lee, M., Tang, C.K.: A Computational Framework for Segmentation and Grouping. Elsevier Science Ltd., Amsterdam (2000)
Mücke, E.: A Robust Implementation for Three-dimensional Delaunay Triangulations. In: Proceedings of the 1st International Computational Geometry Software Workshop (1995)
Hormann, K., Reimers, M.: Triangulating Point Clouds with Spherical Topology. Curve and Surface Design, 215–224 (2003)
Lee, D.T., Schchter, B.J.: Two algorithms for constructing a Delaunay triangulation. Int. J. of Computer and Information Science 9, 219–242 (1980)
de Berg, M., van Kreveld, M., Overmars, M., Schwarzkopf, O.: Computational Geometry, Algoritms and Applications, pp. 181–183. Springer, Heidelberg (1991)
Petrie, G., Kennie, T.J.M.: Terrain modelling in Survey and Civil Engineering. Computer Aided Design 19(4) (1987)
Cignoni, P., Montani, C., Scopigno, R.: DeWall: a fast divide and conquer Delaunay triangulation algorithm. Ed. Computer-Aided Design 30, 333–341 (1998)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2004 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Viejo, D., Cazorla, M. (2004). Unconstrained 3D-Mesh Generation Applied to Map Building. In: Sanfeliu, A., Martínez Trinidad, J.F., Carrasco Ochoa, J.A. (eds) Progress in Pattern Recognition, Image Analysis and Applications. CIARP 2004. Lecture Notes in Computer Science, vol 3287. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-30463-0_30
Download citation
DOI: https://doi.org/10.1007/978-3-540-30463-0_30
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-23527-9
Online ISBN: 978-3-540-30463-0
eBook Packages: Springer Book Archive
