
Abstract
The main objective of a tests campaign is to support the related research and development and to evaluate a particular characteristic or parameter of (a subsystem of) the WEC. These experimental tests can be done in three different environments: in a controlled and wet environment (referred to by tank testing), a controlled and dry environment (referred to by test bench) and in an uncontrollable wet environment (referred to by sea trials). Experimental tests on the full or subsystems of the device can be performed during all the development stages of the WEC, and well beyond.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
9.1 Overview
The main objective of a test campaign is to investigate some aspects of a technology or to validate them. Experimental test campaigns on a (model or subsystem) of a WEC can be done in three different environments: in a controlled and wet environment (referred to by tank testing), a controlled and dry environment (referred to by test bench) and in an uncontrollable wet environment (referred to by sea trials). Experimental tests on the full or subsystems of the device can be performed during all the development stages of the WEC, and well beyond (Fig. 9.1).

Flow chart of the experimental testing of WECs
As the complexity, time and costs of the tests significantly increase with the size of the model and the complexity of the environment, it is (often) more adequate to investigate system variables on smaller models, even if the necessity of investigating these parameters come at a later technological readiness level (TRL) stage of the development process (Chap. 4 and [1]). That is why during the development of WECs, there will be a continuous change in between the size of the model and the test environment.
In Fig. 9.2, some of the main laboratory models, test benches and prototypes that have so far been used during the development of the Wavestar WEC are presented. This just illustrates that several different experimental test campaigns are required to support the numerical work and the general development of a WEC.

Some of the development efforts behind the Wavestar WEC; top row an early stage lab model (TRL 2), a benign site prototype (TRL 5); second row a sea trial prototype (TRL 7) and a hydraulic PTO test bench; bottom row a large single float lab model and a lab model with advanced PTOs. Courtesy of Wavestar
9.2 Tank Testing
9.2.1 Overview
Tank tests can be performed during the whole development process of a WEC, from its early proof of concept up to preparing for the next serial production unit. The objectives and testing procedures of a tank testing campaign can thereby differ, depending on the project. Before knowing an exact location of installation of a commercial device, all the tests should be performed on a generic basis, while afterwards more precise investigations with the exact environmental conditions can be done. Table 9.1 presents an overview of possible tank test campaigns together with their main objectives.
Note that all the tank tests related to power performance and structural and mooring loads need to be performed in irregular waves. Regular waves should only be used to characterise the device or to calibrate the system or numerical model (see Chap. 10), as it does not represent a realistic marine environment. In order to have a decent statistical ground, the duration of a test in irregular waves should include a minimum of 1000 waves (of the predominant wave period T p ).
The environmental parameters that can have an influence on the power performance and on the maximal structural and mooring forces can be of many kinds, for example (non-exhaustive) (see Chap. 3):
-
Water depth, as it has a strong influence on the wave steepens, wave celerity and wave direction
-
The wave spectrum, which can be composed of different wave components coming from different storms (this defines the content of the irregular waves)
-
Directional spreading (defines the direction related to the wave spectrum)
-
Water currents (which can result e.g. from the wind, tides or near-shore effects and can have an influence on the motion, directionality and loads on the WEC)
-
Wind (can have an influence on the motion, directionality and loads on the WEC)
Besides the environmental parameters, other parameters might have an influence on the wave conditions such as the disposition of the wave energy converters array.
9.2.2 Representative Sea States
9.2.2.1 Operational Sea States
A description of the wave conditions at a certain location may be required in even a more condensed way than given by a scatter diagram. This is often the case for tank testing, as it would be too time-consuming to assess and optimise the performance of a device for all the bins of the scatter diagram. The gain of time by reducing the to-be-tested wave conditions, will benefit the assessment and optimisation possibilities. In practice, this can be done by grouping various bins of a scatter diagram into a limited amount of “zones”, also referred to as “sea states”. Each sea state will then at least be characterised by a wave period and a significant wave height, and a common water depth and wave spectrum type will be used. The influences of additional environment parameters will need to be investigated separately. An example of commonly used sea states are the five operational sea states and the three design sea states representing the Danish part of the North Sea (Point 3) [2, 3]. Other examples in which sea states have been used for the estimation of the AEP can be found in [4–7].
The selection of sea states for the estimation of the AEP of a WEC has to be done carefully. The large variability in wave conditions between different locations (as illustrated in [8] and in Chap. 3) can result in a loss in accuracy relative to the use of the complete scatter diagram for the estimation of the AEP, however this can be limited if the sea states are selected carefully.
The following recommendations are for the selection and definition of the operational sea states:
-
The amount of sea states should be limited (less than 10 preferably)
-
They should be selected in order to cover the wave energy contribution diagram as well as possible, rather than the scatter diagram.
-
The wave energy contribution of each sea state should be between 5 and 25 % of the total, while having a probability of occurrence of at least 0.5 % of the time, corresponding to 44 h annually.
-
The same size of zones (identical intervals of H s and T e ) can be used for the different sea states, but they can be reduced for zones with higher contribution values in order to increase their accuracy.
-
As the optimal size of a WEC in terms of AEP (usually) increases proportionally with the wave power level of a site, it can be reasonable to have larger sizes (larger intervals of H s and T e ) of sea states when describing more wave energetic locations.
-
For the estimation of the AEP, there is no need to include the very small or large wave conditions, as they will not contribute significantly to the AEP [6]. This is due to their low wave energy contribution and a WEC has usually a bad performance in them, as their design is normally not optimized for them [5].
Note that the bins that are not included into sea states will not be accounted for in the AEP estimation.
The sea state selection in Fig. 9.3 contains seven sea states with the same parameter intervals of 2 m and 2 s for the respective H s and T z axis. They represent 90 % of the wave energy resource and 89 % of the probability of occurrence. In other words, 7801 out of the 8766 annual hours are included and an average wave power level over the included bins is of 26.3 kW/m instead of the 29.3 kW/m, which can be derived from the whole scatter diagram. These values could be increased by adding more sea states, however (as previously mentioned) the largest loss in Prob and Contrib is in the smallest (below 0.5 m H s ) and largest (above 8.5 m H s ), which are not important as mentioned before.

Example of a possible sea states selection for Billia Croo at EMEC, which are represented on the scatter diagram (top figure) and on the wave contribution diagram (middle) and summarized in the table
The wave energy contribution of every bin of the scatter diagram to the overall wave energy resource can be calculated by:
The characterizing H s and T e values of every sea state are the average of the environmental parameters of the various bins included in a sea state weighted by their corresponding probability of occurrence. Herewith, the corresponding wave power (P wave ), which should take the water depth into account, can be calculated by
(More details in Chap. 3). The corresponding equations to calculate the characterizing H s and T e for each sea state are:
and
While, the probability of occurrence (Prob SS ) and the wave energy contribution (Contrib SS ) of a sea state correspond to the sums of the respective values of the bins that each of them include.
Further information and more advanced approaches to representation of the wave climate can be found in Kofoed and Folley [9]
9.2.2.2 Design Sea States
The design sea states correspond to a set of wave conditions with large wave heights, in which normally the largest loads on the structure and mooring system are expected. These often correspond to the 50 or 100 year return wave height (depending on the design standard e.g. [10]), and related wave period. These design sea states can be obtained by defining certain return periods of these extreme wave events and can be derived from long-term probability distributions that are based on past events and hindcast data (Fig. 9.4).

Illustration of the possible process to define the design wave height for a certain return period, which in this case is 12.2 m for a return period of 100 years without considering sample variability or 14.8 m with sample variability at a 90 % one-sided confidence interval [11]
The design wave height with a certain return period can be obtained through those long term probability distribution, while there is no theory to determine the corresponding wave period, due to the complexity and locality of the joint distribution between wave height and wave period (an example of this is a scatter diagram). The design sea state conditions are chosen corresponding to the design wave height and a range of possible corresponding wave periods [10–12].
In the following practical example, the corresponding wave heights to the different return periods have been obtained through a Peak-over-Threshold analysis, using a Generalized Pareto distribution, based on the 30 years hindcast data [13, 14]. The related wave periods to the design wave heights have been obtained through fitting them on a trendline going through all the data points (Fig. 9.5).

Estimation of the design wave heights for different return periods (top) and representation of the operational and design sea states superposed on the 30 year hindcast scatter diagram of DanWEC Pt 1 (bottom)
It is of importance to investigate other environmental parameters and site conditions that could influence the loads on the WECs. Most of these environmental parameters are the same that need to be investigated for power production, however some others need to be addressed as well [10, 12, 15]:
-
Breaking waves
-
Ice
-
Current
-
Water level variations
9.2.3 Hydrodynamic Response
9.2.3.1 Natural Period
The natural period of oscillation, also referred to as the frequency of free oscillation or the eigen period, reveals the decaying period at which a mechanical system recovers from an initial displacement until its undisturbed rest position. Such a system can be a floating body, such as the wave-activated bodies of a WEC, but can as well be the water surface in an OWC or it is as well used in many other fields such as acoustics and structural engineering. In this case, the natural period of oscillation should be investigated for the 6 degrees of freedom (DoF) of the structure and of all the wave-activated bodies connected to the structure [2]. The decaying behaviour of the motion also reveals the amount of hydrodynamic damping that is present in the structure or wave-activated body, which can be used to calibrate the numerical models (read more about hydrodynamics in Chap. 6) (Fig. 9.6).

Results of a decay test for one of the degrees of freedom of the system
The damping in the oscillations of a floating body arise from the wave-drift damping of the hull (wave radiation and diffraction), the viscous nature of water and possibly from the influence of other systems such as the mooring or PTO (more details in Chap. 6). The damping ratio ζ derived from the logarithmic decrement δ can further describe the decaying motion besides the natural period of oscillation. These can be calculated by the following equations:
where
-
xo is the value of the first amplitude
-
xn is the value of the amplitude of a peak n oscillations (periods) away
In practice, these tests assessing the natural period of oscillations for a degree of freedom (DoF) can be performed by applying a force on the structure that would force the body to oscillate only in the specific degree of freedom under investigation. The effect of possible coupled secondary systems, such as mooring system, can be evaluated by repeating the test with and without them.
The natural period of oscillation of a body in any degree of freedom (T x ) is dependent on its mass (m) and its geometry. The geometry affects its (hydrodynamic) added mass M a,0 and thereby the stiffness of the system k. Depending on the DoF, these can as well be expressed in terms of mass moment of inertia I yy and added mass moment of inertia \( I_{yy}^{a} \). The stiffness in heave is in function of the density of the fluid and the waterplane area A wp , while for pitch and roll it depends on the metacentric height \( \overline{GM} \) [16].
Generic resonance period equation:
Heave resonance period:
Pitch resonance period:
Roll resonance period:
In order to modify the resonance frequency, the size, the mass, the shape or the inertia of the body can be changed.
9.2.3.2 Response Amplitude Operators
The response motion of a wave-activated body under wave interaction (corresponding to a forced excitation) can be assessed in regular and irregular waves. The analysis in regular waves presents a direct visual and intuitive representation of the response motions. The response amplitude operators (RAOs) are the ratio between the amplitudes of the motion in one of the degrees of freedom and the amplitudes of the incoming the waves. The RAOs can also be derived from the motion and wave spectra, as the spectra are proportional to the amplitudes squared. The ratios between the spectra of the motion and the spectra of the incoming waves are denote the transfer function, which therefore is the RAO squared.
In Fig. 9.7, the response motion in one degree of freedom of a wave activated body is represented. The successive tests were done with equal wave height but incrementing wave periods. Each individual test should last for 30–120 s, which should be sufficient to have a stable motion.

Illustration of the response motions in 1 DoF of a wave-activated body in regular waves having a same wave height but incrementing wave period (The vertical axis represents the absolute motion of the body)
The wave period presenting the largest motions, correspond to the resonance period of the wave activated body. The regular wave trials could also give information concerning the phase difference between the resulting motion of the device and the excitation. This can in some cases be a very interesting feature as at a phase shift of 90° resonance occurs.
Figure 9.8 illustrates the transfer function of the pitch motion of a device obtained experimentally in regular and irregular waves. Note that (in this particular case) the wave spectrum drops to zero around the resonance frequency. This makes it difficult to obtain a reliable transfer function for these frequencies and therefore other tests should be performed that covers better the corresponding wave periods.

Illustration of the wave spectrum and in heave obtained in different irregular waves
Note that structures such as ships or floating oil platforms, that are required to be stable at all times, will be designed so that their resonance frequencies will be outside the range of the wave spectrum. This is not always true for WECS, as they might want the main reference structure to be stable, while their wave absorbing body (/-ies) could benefit from the larger resonance oscillations, e.g. the Weptos WEC or the Wavestar WEC.
9.2.4 Power Performance Evaluation
9.2.4.1 Introduction
For experimental tank testing, it is suggested to measure the absorbed power P abs by the device as early as possible in the power conversion chain (from wave-to-wire), in order to obtain the best representation of its wave power capturing abilities. The following power conversion stages should not be incorporated in the performance measurement, as they physically could be subject to serious modifications and their losses and design are usually difficult to scale. This P abs by the model can be converted using different kind of PTOs, e.g. mechanical, pneumatic or hydraulic, which depends on the working principle of the device.
Based on P abs and the available wave power to the device P wave , the performance can be expressed by a non-dimensional performance ratio called the “capture width ratio” or CWR (or η). The fact that it is non-dimensional presents the advantage that the same results can be used for different scaling ratios of the device, meaning that only the wave parameters needs to be adapted correspondingly to the scaling ratio and site. The available wave power to the device corresponds to the average wave energy content per meter of wave front multiplied by the characteristic or active width of the device (widthactive), which corresponds to the width of all the components of the device that are actively involved in the primary conversion stage from wave to absorbed energy.
Depending on the tested wave conditions, a performance curve (2-dimensional) or surface (3-dimensional) can be created, which represents CWR relative to one or two wave parameters and are illustrated in Fig. 9.9. The performance curve or surface could present CWR relative to its most influential wave parameter (T p or H s ), which should be determined during the tank tests, or relative to corresponding non-dimensional values. T p could for example be made non-dimensional by dividing its corresponding wavelength in deep water (L p,0) by the diameter of the main wave absorbing body (d), while H s could directly be divided by d to obtain a dimensionless parameter [17]. Note that the most influential parameter can in this case easily be derived from the performance surface, as CWR increases significantly with decreasing T p , while it remains relative constant for different values of H s .

Illustration of a performance (in terms of CWR = η = ND performance) curve and surface that can be obtained through tank testing [18]
Note that the peak wave period (T p ) is used as reference in Fig. 9.9, instead of T e , as the wave frequency spectrum for all the lab tests was user-defined. During sea trials, the shape of the wave frequency spectrum changes with the conditions; there it is more representative to present the performance relative to T e , as it presents a more robust average of the wave conditions. T p represents only one parameter of the spectrum (the peak), which makes it very unstable and not very representative. T e is derived from the whole spectrum, which is thereby more reliable.
9.2.4.2 Power Performance Estimation Based on Sea States
Based on the performance of the device obtained in irregular waves (the influence of 3D waves will be assessed through a parametric study) and after optimization of the PTO load in the tested sea states, the mean annual energy production (MAEP) of the device can be estimated. Table 9.2 illustrates how the performance of a device, based on tank testing with sea states, is calculated and can be presented.
The upper part summarizes the wave characteristics and corresponding performance results for the full-scale model based on CWR obtained through tank tests. The bottom part presents the resulting values that give an overall overview of the performance. Definitions of the different terms are given after the table. An estimation of the actual generated electrical power (P el ) can also be added if the efficiency of the PTO system (η PTO ) of the full-scale device is known. This value can (normally) not be deducted from the tank tests as the rest of the conversion chain after the energy absorption, from wave-to-wire, will normally not be included in the model or not be representative of its full-scale version in terms of efficiency.
The non-dimensional performance or CWR of the device for each sea state (η SS ), as described in Sect. 9.2.4.1 and by Eq. (9.11), is the ratio between the absorbed power by the device and the wave power available to the device for the wave conditions corresponding to the respective sea state.
The average absorbed power by the device or P abs for a sea state can be calculated with the η SS and P w for the wave conditions corresponding to a sea state:
The overall non-dimensional performance can be obtained by the weighted sum of the η SS relative to their wave energy contribution:
The overall average absorbed power P overall is calculated by the weighted sum of the P abs of each sea state relative to their Prob or by taking the product of the overall non-dimensional performance and the available wave power. Note that P wave corresponds to the overall available wave power calculated based on the scatter diagram (the gross available or theoretical wave resource) and not only what is included in the sea states. If the calculation of η overall is based on the technical resource, then this will be significantly overestimated.
or
The annual (absorbed) energy production (AEP and given in kWh) is then obtained by multiplying (P abs ) overall by the duration of a year (8766 h):
The capacity factor (CF) represents the average usage of the installed capacity, which corresponds to the ratio between the overall average absorbed energy and maximum absorbed energy in any wave condition. (This is based on the average absorbed power in the maximum sea state and does not take the possible maximum value of the absorbed power in the maximum sea state into account.)
Figure 9.10 presents an example of the evolution of η SS over the various sea states together with their corresponding wave energy contribution, absorbed power and the product of the absorbed power with the probability of occurrence.

Example of the representation of η SS (blue line), Contrib SS (red line), P abs and Prob * P abs for the different sea states, based on the values given in Table 9.2
The representation of the performance enables to visualise the various parameters over the different sea states. In this case, the non-dimensional performance peaks at sea state two while the maximum wave energy contribution peaks between sea state three and four. The mean annual energy production (MAEP) could be increased by trying to match these peaks better. This could be done by increasing the size (scaling ratio) of the full-scale device (which has been discussed in Sect. 9.2.5.3). However, P abs is in the same range in sea state three, four and five. This is an advantage as the device will require roughly the same capacity of PTO system for these wave states (leading to a high capacity factor), which is most-likely not the case if the peak of the non-dimensional performance is close or beyond the peak of the wave energy contribution curve. The Prob * P abs curve shows that most of the energy will in average be absorbed in sea state 2, which correspond to 1 m (H s ) waves, and the least in sea state five.
9.2.4.3 Power Performance Estimation Based on the Scatter Diagram
The performance analysis and estimation of the MAEP presented as a non-dimensional performance surface is similar to the one based on sea states. The main difference is that the performance is not only given for a limited amount of sea states, but is given individually for every “bin” of the scatter diagram. Therefore, in the equations given in Sect. 9.2.4.2, the subscript “SS” should be replaced by “bin” and they are then applicable in this context.
The power performance of the device is represented by the 3-dimensional performance surface (as illustrated in Fig. 9.9), while the wave conditions at the location can be represented by the scatter diagram and by the wave energy contribution diagram (see Sect. 9.2.2.1). The resulting performance of the full-scale device corresponds to the power matrix and Pmech * Prob graph, in which Pmech represent the mechanical absorbed power, as given in Fig. 9.11.

Power matrix and P mech * Prob plot with scaled tested wave conditions (blue dots) and corresponding sea states (green squares) (Illustration of the WEPTOS WEC in Danish North Sea wave conditions at a scaling ratio of 1:35 and with a maximum full-scale P mech of 2400 kW)
Note that it is off course of importance that the wave energy contribution diagram is well covered by the tested sea states, otherwise excessive extrapolation will have to be done in order to obtain a representative performance curve. This is particularly difficult when a large range of scaling ratios are used.
Note also that the power matrix derived from testing can only be applied to offshore locations that have a similar environment (e.g. water depth, …) and wave conditions (e.g. spectral shape, …). To broaden the usability of this power matrix, additional parametric studies can be performed in order to investigate the influence of certain important parameters (e.g. water depth).
9.2.4.4 Testing Procedure for Power Performance Analysis
As tank testing is relatively time-consuming (from a couple of weeks to months usually) and the time in the tank facilities is limited, it is important to have a well-defined test procedure. The main steps during the power performance assessment of a WEC are:
What | How |
|---|---|
Part 1: Identification and characterisation of the system | |
Identify hydrostatic and hydrodynamic response of the WEC | – Stability and GM centre of mass and buoyance etc – Asses the natural period of oscillations and decay response – Asses the hydrodynamic response in regular waves |
Identify the sensitivity and range of the PTO and sensors | – In regular waves asses the required range of the PTO and sensors, and adapt them accordingly to the maximum |
Identify the influence of physical parameters, which are intended to be assessed in depth in irregular waves later | Perform elementary regular wave batches (0.5–2 min tests with increasing wave period), while changing one variable at the time between batches. This could give a good feeling on the importance of the parameter |
⇨ Possibly make adjustments on design, sensors and/or scaling ratio, as now the natural period of oscillation and the range of usage of the sensors and PTO have been identified | |
Part 2: actual test campaign | |
Irregular waves on reference setup | – Optimise PTO load for each sea state – Duration of tests is 1000 waves (relative to Tp) |
Optimisation of the design | – Asses the influence of alterations to the design, in order to optimise its power performance, hydrodynamic behaviour, …. Start with tests in sea state 2 and 3, as these contribute the most to the MAEP – The PTO load needs to be optimised for each sea state – These tests will also provide the final RAO’s |
Asses the influence of additional physical parameters | – e.g. mooring configuration, water depth, oblique waves … – The PTO load needs to be optimised for each sea state |
Asses the influence of additional environmental parameters | – This is of importance when later trying to estimate the performance of the device for different wave conditions, e.g. water depth, oblique waves, 3D waves, … – The PTO load needs to be optimised for each sea state |
⇨ The data of each test should be processed after each individual test in order to be able to compare the results with the one of previous tests | |
To begin with, a general appreciation of the hydrodynamic behaviour of the device should be made. This can in practice be done in regular waves and without any PTO loading, by making various short tests (0.5–2 min each) where the wave height is maintained constant and the wave periods are each time incremented. This should be repeated for constant wave periods and increasing wave heights, and it could for example be used to identify the resonance frequency of the structure or of the wave activated body and show the range of effect of the wave conditions. A similar approach could possibly be used to investigate the influence of different configurations, for example if the device has an adaptable geometry, weight or floating level.
After the hydrodynamic behaviour, the sensitivity and relevant working range of the PTO loading adjustment system have to be assessed. In this case, the load should be increased again in batches (0.5–2 min each) for a couple of the tested wave conditions. In practice, this can be done by incrementing the load between each batch by 10 % of its full range and repeated for the smallest, one or two medium and the largest sea states. Although these tests are not crucial, they often lead to a significant gain in time.
Note that in order to maintain the same wave energy content in between regular and irregular waves, the significant wave height (H m0) from the irregular waves has to be divided by √2 to obtain the wave height for the regular waves, while maintaining the same wave period (T = T e ). However, in the case that the response or performance of the device is mostly dependent on the wave period, it might be beneficial to match the wave period in regular waves with T p , as this is the dominant wave period in irregular waves.
The actual performance assessment is based on long-crested irregular waves, having a specific wave spectral shape (e.g. JONSWAP spectrum with ɣ = 3.3). Each individual IW lab test should have a length of 1000 peak wave periods (for statistical robustness), which should take about 20–30 min, depending on the scale. Moreover, in each wave condition the PTO load needs to be optimised for optimal energy production (as presented in Fig. 9.12). Ideally, an exact reproduction of the waves should be performed in between those tests. Depending on the complexity and possibilities of tuning the PTO loading, this step will require generally between 3 to 5 tests for each sea state. However, if the device contains various design variables, then they need to be investigated as well in some of the sea states.

Illustration of the effect of the PTO loading on the non-dimensional performance (η), given for three different configurations of the same WEC model
After having obtained the best performance of the device in all the sea states, the influence of other environmental parameters can be investigated and the influence of some extraordinary components or modifications on the performance and hydrodynamic behaviour can be assessed. Regarding the wave conditions, the sensitivity of the performance to the wave frequency spectrum, wave direction and wave directional spreading (3D waves) should be investigated. This should be done with various values for them, probably focusing on the most wave energy contributing sea states. The load optimisation should be done for each case and their result should be compared to the reference long-crested irregular waves. The same goes for the tests analysing the influence of some extraordinary components or modifications on the performance and hydrodynamic behaviour.
9.2.5 Scaling
9.2.5.1 Defining the Scaling Ratio
The scaling ratio indicates the ratio between the model or prototype and the commercial WEC. The size of the model should be chosen in function of the laboratory facilities and the purpose of the tests, while the size of the commercial WEC depends on the WEC technology and on the commercialisation strategy of the developer, which is often a trade-off between financial resources and optimising its cost of energy. The scaling ratio, and thereby the size of the commercial WEC, can be optimised all along the development of the WEC as it has a strong influence on the overall cost and power production of the device, but as well on the capacity factor and fluctuations in the power produced by the WEC. However, in order to obtain representative wave conditions for the tank tests model, a scaling ratio needs to be used to scale the sea states and water depth.
In most cases, the first serial production of a WEC, will be smaller than the scaling ratio leading to maximum power production, in order to keep capital expenditures lower. In this case, the scaling ratio will need to be as large as the financial resources allow for it.
Whenever, the power production needs to be maximised, the scaling ratio will intend to have the resonance period of the wave-activated bodies (e.g. point absorbers, OWCs and pitching flaps) in function of the predominant wave period, which corresponds to the peak of the wave energy contribution. Other WECs, where the structure is required to be stable (such as floating overtopping devices) will try to keep their resonance period as far out as possible from the wave peak period.
In Fig. 9.13, an illustration is given on how the main influential power performance factors might overlap. Note that the resonance period of the wave absorbing body corresponds to the peak of the capture width ratio, and that the predominant wave period, corresponds to the peak of the wave energy contribution.

Illustration of a possible overlap between the resonance period of the wave absorbing body, with the capture width ratio of the WEC and the wave energy contribution given against the peak wave period
The scaling ratio affects directly the mass and geometry of a body, which thereby influences its natural period of oscillation (more details in Chap. 6).
To give an order of magnitude of the optimal size in terms of power production for generic full-scale WECs in a location with relatively high wave power level:
-
Point absorbers will be in the size of 5–15 m in diameter
-
Salter’s duck will have diameters in the range of 10–20 m
-
Pivoting flaps will be in the range of 15–25 m wide and their thickness between 2–10 m.
-
A floating overtopping WEC (or any reference structure) would optimally be at least as long as one wavelength, in order to be stable.
9.2.5.2 Scaling Law
When addressing the scaling of the mechanical interactions between fluids and solids, three main kind of forces are of importance: the inertia, gravitational and viscosity force. Depending on the case, the relative magnitude of those forces varies. Their relative importance can be quantified using two non-dimensional numbers: The Froude and Reynolds numbers [19]. Ideally, the same balance between the different forces should be maintained for the model tests as for the full-scale ones.
As inertia forces are normally predominant for the scaling of the body-fluid interaction of WECs, the Froude’s Model Law (Fr) is used to transfer data between different scales. It ensures the correct similarity in between geometrical, kinematical and dynamical features. Froude’s scaling law can be summarized as:
where:
-
\( S = L_f/L_m \) = scaling ratio, requiring geometrical similarity (–)
-
U = velocity (m/s)
-
g = gravitational acceleration (m/s2)
-
L = dimension (m)
-
Subscripts m and f stand for model and full-scale
Table 9.3 presents more explicitly the direct application of Froude’s Model Law for scaling lab model related characteristics and results. The column presenting an example, presents the multiplication factor that has to be used on the model results for the different parameters to obtain the full scale, equivalents.
Note that whenever possible, test results should be expressed as non-dimensional values, meaning that they are applicable for different scaling ratios e.g. the capture width ratio of a device.
Scaling of other (non-inertia dominating) parameters depend on other specific scaling laws, meaning that for example dimensions are not scaled on the same way as compressibility or as friction. This makes it particularly difficult to scale systems such as OWC’s or PTO systems (more details in Chap. 6). Thereby, it can be very difficult to scale systems accurately, as each system need to comply with the scaling laws in order to be representative.
9.2.5.3 Optimising the Scaling Ratio
Before starting the tank test campaign, a scaling ratio needs to be defined in order to scale the sea states. In practice, the offshore wave conditions and the specifications of the wave tank are fixed, while an estimation of the size of the full-scale WEC, should be made. A suitable scaling ratio needs to be found, that allows a decent representation of these scaled wave conditions in the tank, and a model needs then the be made following the same scaling ratio. Note that a larger scaling ratio corresponds to smaller scaled wave conditions, water depth and model.
An illustration of the main power performance result of tank tests is presented in Fig. 9.9. It contains the non-dimensional performance (η or CWR) for all the sea states tested with a fitted curve through the results. The results from this test campaign, can then be used as well for other scaling ratios, based on approximations with the fitted curve.
In the following figures, an example is given of the effect of having a too small or too large scaling ratio on the performance and the maximum power production (based on the values given in Table 9.2). As mentioned before, by adapting the scaling ratio to the tank test wave conditions are modified and the resulting non-dimensional performance can be obtained from the fitted power curve. In between the 3 case, the curve is translated in function of the scaling ratio; while off course the full scale wave conditions and thereby the wave energy contribution curve remain the same. Note that the wave energy contribution is usually the largest for the average wave conditions, while they decrease for the largest and smallest ones (Fig. 9.14).

Illustration of the possible effects of the scaling ratio, with as reference the lab model, on the performance of the device. In this figure, the curves for the smallest size of the WEC are presented
Figure 9.14 illustrates that a too small scaling ratio will lead to a peak in the non-dimensional performance curve (η, corresponding to the resonance period of the wave activated body) well below the peak of the wave energy contribution curve (contrib). In this case, η decreases and the wave power content increases with the sea states. Although the peak on the wave energy contribution is found for sea state 3 and 4, the maximum absorbed power contribution (Pabs x Prob) is found at sea state 2. This mismatch indicates that the resource could be better exploited. The resulting values for this scaling ratio are:
-
P abs, overall of 226 kW
-
η overall is 0.116
-
Capacity factor is approximately 0.36.
In the second case (Fig. 9.15), the size of the device is enlarged, which results in a peak of the η curve at sea state 3, which is close to the maximum wave energy contribution. This has an immense effect on the absorbed power in the sea states, as here η increases with the wave power in the first 3 sea states, however it also comes at a large cost of the capacity factor. The results are:
-
P abs, overall increases to 425 kW
-
η overall to 0.218
-
Capacity factor approximately 0.13
Although the large gain in power production, the capacity factor is significantly reduced as the maximum P abs, SS is approximately five times larger, while P abs, overall is only approximately twice larger. This indicates that although the energy production has significantly increased, the PTO system and structure got larger and thereby more expensive, which might not always result in a more cost-effective solution

Illustration of the possible effects of the scaling ratio, with as reference the lab model, on the performance of the device. In this figure, the curves for the intermediate size of the WEC are presented
In the last figure of the illustration (Fig. 9.16), the device is even further increased in size, which makes the peak of the ND performance curve to coincide with sea state 5. In this case:
-
P abs, overall decreased to 366 kW
-
η overall decreased to 0.188
-
Capacity factor is even further diminished.
Fig. 9.16 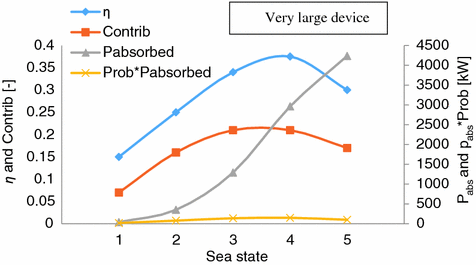
Illustration of the possible effects of the scaling ratio, with as reference the lab model, on the performance of the device. In this figure, the curves for the largest size of the WEC are presented

In this example, the optimal scaling ratio will most likely be slightly lower than the intermediate sized WEC, as there will be the best compromise between energy production and size of the device and its PTO system. However, a complete cost model should be included in order to find the most cost effective size of the structure including installation, power connection mooring and maintenance. This requires also that the structural design of the scaled models can handle the scaled loads of the extreme conditions (see more in Chap. 4).
9.2.6 Structural and Mooring Loads
9.2.6.1 Introduction
The objective of structural and mooring load tests is to obtain a good sense of the maximum loads that can be expected on these parts of the system. These tests need therefore to be executed on a very representative model and in the wave conditions resulting in these maximum loads (design wave conditions), which usually correspond to the extreme wave conditions. A set of extreme wave conditions, combining wave, current and wind specifications are provided in relevant design standards, such as the DNV standards on offshore wave and wind energy [10, 12, 15].
Before being able to obtain these resulting loads, usually the mooring configuration needs to be optimised. This will physically correspond to adapting the force-displacement response of the mooring system, which can be done by changing the length, mass, buoyancy and other possible parameters of its different members. Once the mooring configuration is optimised, then the structural and mooring forces can be obtained.
9.2.6.2 Mooring Forces
A rough estimation of the mooring forces can be obtained by various numerical means, e.g. with the Morison equation (see Chap. 7). For a given water depth, maximum excursion of the WEC and the maximum horizontal mooring force at the WEC, a suitable mooring solution can be designed. A static analysis of the force-displacement curve can then be calculated, against which the experimental tests will provide the dynamic analysis.
As the motions and the mooring forces are strongly influenced by the mooring stiffness, the mooring stiffness, and thereby the force-displacement curve, needs to be scaled accordingly. In practice, if a catenary mooring system is used then it can be possible to directly scale the mass/unit length of the chain and the geometry and mass of a buoy. If elastic properties of the system are of importance then the selection of the material is important and the right stiffness can be obtained (Fig. 9.17).

Example of the force displacement—curves and stiffness relative to displacement curves for a catenary and tension leg mooring system [20]
Note that the surge excursion of the WEC will be strongly affected by wave groups, even more than from one large individual wave. It is therefore important to repeat the same design wave conditions with different wave trains.
9.2.6.3 Structural Design and PTO Loads
Each component of the WEC requires to be dimensioned in function of the highest loads (e.g. 1/250 force) and adequate safety factors. Multiple sensors need thereby to be incorporated at strategic places in the structure and other components, so that decent measurements of the maximum loads can be made (Fig. 9.18).

Picture of a floater of the Wavestar WEC being experimentally tested for wave loads. Courtesy of Wavestar
It is highly recommended to complement these experimental tests with additional calculations or numerical models.
9.2.7 Parametric Study
9.2.7.1 Physical Alterations to the Model
The objective of making changes to the model is often to investigate ways to increase its performance, or to test other hydrodynamic, structural or more economically design solutions.
It can be sufficient to perform only a few trials to assess the impact of alterations. If the alteration is not tested in all operational or design sea states, it should especially be investigated in the conditions where it is the most critical, e.g. where the wave energy contribution is the highest or where the model obtains its highest loads. The results of the test should be compared to a reference tests, being the original setup without any alterations. Every alteration should be investigated separately in order to identify the influence of every parameter individually.
9.2.7.2 Modification of Wave Parameters
In a laboratory environment, normally long crested irregular waves are used that are defined by an H s and T p values together with a defined wave spectrum, which corresponds to a sea state. However, the environmental parameters describing a marine location (wind, currents, bathymetry, directional wave spectrum, …) are numerous and can in many cases vary independently from each other. Therefore, it is of importance to asses to influence of each of these relevant environmental parameters in operational and design wave conditions.
The influence of these additional environmental parameters needs to be addressed separately and over the whole range of their possible extent, which can then be compared with the original reference situation.
9.3 Sea Trials
9.3.1 Introduction
After extensive tank testing and individual components analysis on test benches, the first sea trials marks the beginning of a new very exciting but demanding stage in the development of a WEC. It is initiated by an intense preparation effort, requiring to investigate a vast range of new grounds and challenges, just to make everything ready and to be prepared for the new uncontrolled environment with restricted access. Sea trials can be performed for a wide range of objectives, which can have a strong influence on the capabilities of the WEC prototype and on the test location. Besides the data gained from the sea trials, the construction of WEC and the experience with its operation and maintenance, are as well highly valuable. Some of the main objectives for sea trials can be:
-
To demonstrate the technology in real ocean conditions.
-
To (ultimately) operate the system as an autonomous power plant.
-
To measure, verify and validate loads, motions and power performance calculations and estimations.
-
To refine the Levelized Cost of Energy (LCoE) estimations, based on the new and more representative mean annual energy production (MAEP), capital costs (CapEx) and operation and maintenance costs (OpEx) evaluations.
Based on the sea trials, many cost and power performance estimations will be made for a commercially operated WEC array. However, there will be some significant differences between the situation of the sea trial and of the WEC array, in terms of design and size of the WEC, environmental conditions and array effects. An overview of the situation is presented in Table 9.4.
The influences between the two situation can have significant influence on the mean annual energy production and cost of the WEC. Therefore, they need to be carefully investigated, possibly during the sea trials, but otherwise complemented by representative model tests or validated numerical models.
In this chapter, especially the power performance evaluation is emphasized. The presented methodology can be applied to all WECs and its aim is to estimate the electricity production of a full-scale WEC (array), operating as a power plant, at another location, based on the measurements of the sea trials. Methods for this are being currently drafted under the IEC 62600-102/CD [21].
9.3.2 Performance Assessment of WECs Based on Sea Trials
9.3.2.1 Introduction
A condensed overview of a methodology to equitably assess the performance of wave energy converters based on sea trials will be presented here [22, 23] and case studies of it can be found for the Pico OWC and the Wave Dragon WEC [24, 25].
The “Equitable Performance Assessment and Presentation” methodology aims at assessing the performance of any device, based on sea trials, in a transparent and equitable way, resulting in an estimation of the mean annual energy production (MAEP) together with a corresponding accuracy.
Sea trials are (generally) very expensive and time-consuming, as they require heavy equipment and some wave conditions only occur sporadically [1]. Moreover, various problems might occur and different parameters have to be tested and optimized. This (usually) leads to a vast amount of discrepancy in the recorded performance of the device, which each should be clearly marked—especially in the early stages of testing. The methodology thereby accepts incomplete and interrupted data series from sea trials, which were not obtained during autonomous mode. It, however, expects the developer to provide clear and transparent information regarding the data and the sea trials. On the contrary, for (near to) commercial devices all the data recorded over a given time period under continuous and autonomous operation of the WEC would need to be used, without exceptions (IEC 62600-100/TS) [26].
A robust but flexible methodology is required that can take the discrepancy of the power performance into account, while enabling the estimation of the MAEP of the device at the test location and of the full-scale device at any location of interest. The methodology favours larger data sets as it makes the resulting performance more robust and the corresponding uncertainty interval smaller.
An overview of the methodology is given in Fig. 9.19.

Overview of the power performance assessment procedure
9.3.2.2 Preparing the Environmental and Performance Data
The first part is to process separately the power performance data and the environmental data of the test and possibly of another given location.
In order for the environmental data to be representative, it requires to cover a long period of time (>10 year) and it can be measured or hindcasted. This will usually be condensed into a bi-variate scatter diagram (H s − T e ) in order to represent the wave conditions. However, this can be extended to more detailed (n + 2) scatter diagrams by including other environmental parameters, such as e.g. wave direction, as they can be of significant influence on the power performance of the WEC. In case that the MAEP is calculated for another location, it will be needed to take the environmental parameters that are different and that have an influence on the performance of the WEC into account in the description of the environmental conditions. This could also be important, if the environmental conditions during the sea trials have not been representative for the long-term average conditions (Fig. 9.20).

The overall bi-variate scatter diagram with data points and corresponding directional wave rose (left) or the directional scatter diagrams with corresponding data points
The same method can be used if the environmental matrix is represented more in detail than just by a bi-variate scatter diagram. The performance data will then have to be divided over the different scatter diagrams and the probability of occurrence of these different scatter diagrams will have to be known. Afterwards, their results can be added to each other to obtain the overall MAEP.
Besides the long-term environmental data, there will also be the performance and environmental data that is collected during the sea trials. This recorded data, referred to as the “performance data”, needs to include a wide range of environmental and device dependent parameters that are evaluated over a defined timespan, usually 30 min [27]. The list of parameters to be included depends on the desired application and is especially large whenever a parametric study or a wave-to-wire analysis is intended to be produced. The key and indispensable environmental and performance parameters required for each data sample are:
-
H m0 Significant wave height derived from spectral moments
-
T e Wave energy period
-
P w Wave power (taking the water depth into account)
-
P el Produced electrical power
-
P abs Primary absorbed power by the device
-
η Capture width ratio (CWR)
This list will usually be broaden by various parameters describing the environmental conditions more specifically, such as e.g. the wave direction, or by parameters describing the configuration and setup of the device, e.g. control strategy. It is important to include any possible environmental parameter that has a strong influence on the power performance of the WEC (i.e. wind, current and water level).
It is also desirable to have a measurement of the power directly absorbed by the WEC from the waves, P abs , without further power conversion modules in between. This is because the P abs represent the upper limit of the system (and it is scalable and can be used to define the efficiency of the PTO). These other components in the PTO could possibly also be changed or improved afterwards and could possibly be difficult to scale. However, for full-scale devices that are ready to be commercialized, the representative power performance measurement will most-likely be at the grid connection, as it will give the most accurate representation and estimation of the MAEP of the whole device.
9.3.2.3 Scaling of the Performance Data
In case that the power performance analysis has to be made for a larger size of the WEC, than tested during the sea trials, then the environmental parameters of the performance data can possibly be scaled at this moment of the procedure. Froude scaling should be used, as stipulated in Sect. 9.2.5, on the environmental parameters, while only the relative measures for the power performance parameters (capture width ratio) can then kept being used.
The optimal size of the WEC can depend on various parameters, from hydrodynamics to economics and logistics, on which a brief approach on the hydrodynamic optimization is given in Sect. 9.2.5.3.
9.3.2.4 Categorising the Data
All the performance data collected during an one straight operational period of the WEC, without interruption or incomplete data, will be used to asses the overall performance. The more data that is available, the more robust the estimation will be and thereby the lower the uncertainty related to the obtained performance of the WEC in real sea conditions. The sea trial experience could as well give an indication on the expected availability of the WEC, which as well has an influence on the MAEP.
The relevant performance data will be categorised into subsets, according to the definition of the bins of the scatter diagram and possibly also according to the abundance of performance data. Note that in some cases, only a scatter diagram will be available for a given location (and not the long-term timeseries); here the same bins will have to be used as the one defined in the scatter diagram.
An illustration of these bins dividing the data into subsets is presented in Fig. 9.21. For each of these bins, corresponding to data subsets, an average CWR and related uncertainty value will calculated.

Scatter diagram with performance data (left) and zoning of the performance data (right)
The bins are delimited by a certain range of wave height and wave period (H m0 and T e ), which is suggested to be the same for all of them. This corresponds normally to bins of 0.5 or 1 m in significant wave height and 0.5, 1 or 1.5 s in wave period. In practice, the size of the bins, will influence the resolution of the power matrix, the amount of data points that will be found in a bin, the variation between the performance of different data points and thereby the uncertainty related to the average power performance of a bin.
So far, no standard selection criterion exist (or been completed) as not enough developers have shared their results and approaches, however some specifications can be suggested:
-
The bins should all have the same size.
-
The performance data analysis has to be done with the respective η value and with the absolute performance in kW.
-
At least five performance data points have to be included in the data selection of each bin. However, it is strongly encouraged to increase the amount significantly when sufficient data is available, in order to obtain a more robust performance representation.
-
All the acquired performance data in a certain period should be used to represent the overall performance. This can be difficult for new prototypes undergoing sea trials, which did not acquire sufficient data during long enough autonomous operation of the WEC. Exceptions to this rule could be then accepted (meaning that the developer choses to only include a subset of the available performance data, by screening the performance data), as long as this is clearly stated and done on a transparent manner. This will indicate that the WEC is still a prototype version (Fig. 9.22).
Fig. 9.22 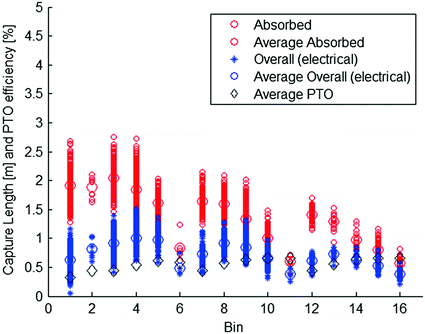
Representation of the performance data for all bins

For each of the bins representative wave and performance have to be calculated. The parameters characterizing the wave conditions (H m0, T e ), probability of occurrence (Prob bin ) and the wave energy contribution (Contrib bin ) have to be derived from the long term environmental data, given by Eqs. (9.3) and (9.4).
The average and uncertainty of the performance of the WEC for a bin has to be based on the performance data. This is given in terms of a non-dimensional performance value (ƞ bin ) and the uncertainty is expressed in terms of sample standard deviation (s bin ) and confidence interval (CI bin ), using a standard confidence level at 95 % and a Student’s t-distribution. The distribution might not be the most suitable and can be adapted in order to be more representative and accurate.
This approach incites the WEC operation to focus on demonstrating good performance over longer periods of time (resulting in a greater amount of performance data points) in order to stabilise the ƞ bin and to reduce the CI bin . The average ƞ and its corresponding confidence interval for each bin, based on the selected performance data points (n), can be calculated as such:
9.3.2.5 Complementing the Performance Data
As mentioned before, at the end of the sea trials there might not be sufficient performance data to cover the whole scatter diagram abundantly, as the sea trial period is limited, some wave conditions only occur infrequently, and the WEC might not always be in operation. Therefore, it is likely that some bins of the scatter diagram might not be populate with sufficient performance data in order to calculate for it a representative performance value.
The power performance of the WEC might be estimated based on the measured performance data from the sea trials through validated numerical models or experience from tank testing. This off course has to be done very carefully, and therefor these estimations have to be very conservative (Fig. 9.23).

The original (left) and extended (right) bins zoning the power performance data (little dots) obtained through sea trials and estimations
Note that the use of estimated power performance data, has to be explained and clearly stated together with the mean annual energy production estimation.
9.3.2.6 Estimating the MAEP
The P abs by the WEC for the environmental conditions linked to each bin can be obtained by multiplied their non-dimensional performance values by their corresponding P w . This will in other words lead to the absorbed power matrix.
The absorbed power matrix can then be multiplied by the PTO efficiency matrix, which can be derived from the sea trials, in order to obtain the electrical power matrix. Note that the PTO efficiency matrix could be updated, to take improvements of the system into account or differences due to scaling. This is acceptable as long as this is explained, clearly indicated and that the changes are conservative (Fig. 9.24).

The absorbed power matrix, the PTO efficiency matrix and the resulting electrical power performance matrix
The resulting mean annual energy production, with its uncertainty, can be calculated similarly as in the case of the performance estimation based on experimental tank testing (Sect. 9.2.4.2). It corresponds to making the sum of the product of the electrical power matrix with the scatter diagram [8, 28].
The unbiased estimate of the overall standard deviation (s overall ) and confidence interval (CI overall) can be obtained with Eq. (9.21), in which X can be replaced by s or CI in order to obtain their individual overall appreciation:
The estimation of the annual energy production together with an estimation of its uncertainty will give a strong indication of the accuracy and technological readiness of the WEC.
References
Holmes, B.: OCEAN ENERGY : Development and Evaluation Protocol—Part 1 : Wave Power. HMRC—Marine Institute, pp. 1–25 (2003)
Meyer, N.I., Rambøll: Bølgekraftprogram - Afsluttende rapport fra Energistyrelsens Rådgivende Bølgekraftudvalg (2002)
Kofoed, J.P., Frigaard, P.: Development of wave energy devices: the Danish case. J. Ocean Technol. 4(2), 83–96 (2009)
Salcedo, F., Rodriguez, R., Ricci, P., Santos, M.: OCEANTEC : sea trials of a quarter scale prototype. In: 8th European Wave and Tidal Energy Conference (EWTEC), Uppsala, Sweden (2009)
O’Sullivan, D.L., Lewis, A.W.: Generator selection and comparative performance in offshore oscillating water column ocean wave energy converters. IEEE Trans. Energy Convers. 26(2), 603–614 (2011)
Salter, S.H., Taylor, J.R.M.: Edinburgh wave power project—bending moments in long spines. United Kingdom Department of Energy, pp. 1–233 (1984)
Nielsen, K.: Development of recommended practices for testing and evaluating ocean energy systems. OES IA Annex 2—Doc. No T02—0.0 (2010)
Pecher, A.: Performance evaluation of wave energy converters. Aalborg University (2012)
Kofoed, J.P., Folley, M.: (2016) Determining mean annual energy production. in Folley M. (ed.) Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays, pp. 253-266, 1st edn. Academic Press, Incorporated
Det Norske Veritas: DNV-RP-C205: environmental conditions and environmental loads (2010)
Liu, Z., Frigaard, P.: Generation and analysis of random waves (1999)
Det Norske Veritas: DNV-OS-J101: design of offshore wind turbine structures (2013)
Brodtkorb, P.A., Johannesson, P., Lindgren, G., Rychlik, I., Rydaan, J., Sjap, E.: WAFO: a Matlab toolbox for analysis of random waves and loads. In: Proceedings of the 10th International Offshore and Polar Engineering Conference, Seattle, USA, pp. 343–350 (2000)
DHI: Matlab toolbox (2012)
Det Norske Veritas: DNV-OS-E301: position mooring (2010)
Holmes, B.: Tank testing of wave energy conversion systems. The European Marine Energy Centre Ltd (Marine Renewable Energy Guides), pp. 1–82 (2009)
Kofoed, J.P., Antonishen, M.: The crest wing wave energy device—2nd phase testing. Aalborg University DCE Contract Report No. 59, pp. 1–37 (2009)
Pecher, A., Kofoed, J.P., Larsen, T.: Design specifications for the Hanstholm WEPTOS wave energy converter. Energies 5(4), 1001–1017 (2012)
Payne, G.: Guidance for the experimental tank testing of wave energy converters. Supergen Mar., pp. 1–47 (2008)
Pecher, A., Foglia, A., Kofoed, J.: Comparison and sensitivity investigations of a CALM and SALM type mooring system for wave energy converters. J. Mar. Sci. Eng. 2(1), 93–122 (2014)
IEC TC114/TS62600-102: Marine energy—wave, tidal and other water current converters—part 102 : power performance assessment of electricity producing wave energy converters. http://www.iec.ch/dyn/www/f?p=103:23:0::::FSP_ORG_ID:1316
Kofoed, J.P., Pecher, A., Margheritini, L., Antonishen, M., Bittencourt-ferreira, C., Holmes, B., Retzler, C., Berthelsen, K., Le Crom, I., Neumann, F., Johnstone, C., McCombes, T., Meyers, L.E.: A methodology for equitable performance assessment and presentation of wave energy converters based on sea trials. Renew. Energy (2013)
Kofoed, J.P., Pecher, A., Margheritini, L., Holmes, B., McCombes, T., Johnstone, C.M., Bittencourt-ferreira, C., Retzler, C., Myers, L.E.: Data analysis and presentation to quantify uncertainty. EquiMar Protocols—Equitable Testing and Evaluation of Marine Energy Extraction Devices in terms of Performance, Cost and Environmental Impact (2011)
Pecher, A., Crom, I. Le, Kofoed, J.P., Neumann, F., Azevedo, E.D.B.: Performance assessment of the Pico OWC power plant following the EquiMar methodology. In: 21th International Offshore (Ocean) and Polar Engineering Conference (ISOPE), Maui, Hawaii (2011)
Parmeggiani, S., Chozas, J. F., Pecher, A., Friis-Madsen, E., Sørensen, H.C., Kofoed, J.P.: Performance assessment of the wave dragon wave energy converter based on the EquiMar methodology. In: 9th European Wave and Tidal Energy Conference (EWTEC) (2011)
IEC TC114/TS62600-100: Marine energy—wave, tidal and other water current converters—part 100 : power performance assessment of electricity producing wave energy converters. IEC (2012)
McCombes, T., Johnstone, C.M., Holmes, B., Myers, L.E., Bahaj, A.S., Kofoed, J.P.: Best practice for tank testing of small marine energy devices. EquiMar Protocols: Equitable Testing and Evaluation of Marine Energy Extraction Devices in terms of Performance, Cost and Environmental Impact (2011)
Kofoed, J.P., Pecher, A., Margheritini, L., Antonishen, M., Bittencourt, C., Holmes, B., Retzler, C.: A methodology for equitable performance assessment and presentation of wave energy converters based on sea trials. Renew. Energy 52(2013), 990-110 (2013)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is distributed under the terms of the Creative Commons Attribution-Noncommercial 2.5 License (http://creativecommons.org/licenses/by-nc/2.5/) which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
The images or other third party material in this chapter are included in the work’s Creative Commons license, unless indicated otherwise in the credit line; if such material is not included in the work’s Creative Commons license and the respective action is not permitted by statutory regulation, users will need to obtain permission from the license holder to duplicate, adapt or reproduce the material.
Copyright information
© 2017 The Author(s)
About this chapter
Cite this chapter
Pecher, A. (2017). Experimental Testing and Evaluation of WECs. In: Pecher, A., Kofoed, J. (eds) Handbook of Ocean Wave Energy. Ocean Engineering & Oceanography, vol 7. Springer, Cham. https://doi.org/10.1007/978-3-319-39889-1_9
Download citation
DOI: https://doi.org/10.1007/978-3-319-39889-1_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-39888-4
Online ISBN: 978-3-319-39889-1
eBook Packages: EngineeringEngineering (R0)