
Abstract
In this work, the HIgh REsolution Slope Stability Simulator (HIRESSS) model was applied to predict the occurrence of shallow landslides on a regional scale. HIRESSS is a physically based distributed slope stability simulator for analyzing the occurrence of shallow landslides during a rainfall event. The modeling software consists of two parts: hydrological and a geotechnical. The hydrological model is based on an analytical solution of an approximated form of the Richards equation, while the geotechnical stability model is based on an infinite slope model that accounts for unsaturated soil conditions. The model was applied in the Aosta Valley region, located in the northwest of the Alpine chain. The Aosta Valley is highly susceptible to landslides, especially shallow, rapid landslides and rockfalls. The geotechnical and hydrological characteristics of the slopes were recorded in two field measurement campaigns at 12 measurement points. To account for the effects of vegetation on landslides the soil reinforcement due to the presence of roots was also taken into account. The model was applied in back analysis for an event that affected the Aosta Valley in 2009, triggering several fast shallow landslides. In this work the model setup and the validation of the model outcomes are described.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others

Keywords
- Shallow landslides
- Landslide prediction
- Numerical modeling
- Geotechnical characterization
- Valle d’Aosta region
1 Introduction
Shallow landslides are often harbingers of an impending major debris flow. They usually begin as shallow mass movements, involving only a few tens of cubic meters of terrain, but can develop into rapid mass movements that take on characteristics of debris flows and avalanches (Masi et al. 2023). Shallow landslides are triggered by intense rainfall, and multiple and diffuse landslides are often triggered in the region affected by the rainfall.
There are two approaches for predicting shallow landslides at the regional scale: (a) the use of precipitation thresholds based on statistical analysis of rainfall and landslides, and (b) the use of physically based deterministic models (Salvatici et al. 2018). The first category of models is based on a statistical approach by searching for functional relationships between triggering factors (such as precipitation intensity/duration) and actual events in a given area to define warning thresholds. The second category includes the physically based approaches that combine hydrological models and slope stability analysis to predict hazard areas. The stability model is usually based on the infinite slope model. Soil moisture dynamics are usually based on a modified version of the steady-state wetness index (Arnone et al. 2011) or an approximation of the Richards equation (Baum et al. 2002; Simoni et al. 2008). Such models typically provide slope stability assessments based on the factor of safety (FS) (e.g., Baum et al. 2002). While the former approach is currently used primarily at the regional scale (Aleotti 2004; Martelloni et al. 2012; Lagomarsino et al. 2013), the latter approach is more commonly applied at the slope or catchment scale (Pack et al. 2001; Baum et al. 2002, 2010; Lu and Godt 2008; Simoni et al. 2008; Arnone et al. 2011; Salciarini et al. 2017; Park et al. 2013; Rossi et al. 2013). The insufficient knowledge of the spatial distribution of hydrological and geotechnical parameters caused by the extreme heterogeneity and inherent variability of the soil at large scales (Tofani et al. 2017) means that the application of physically based models is generally avoided at regional scales. Conversely, physically based models allow spatial and temporal prediction of landslide occurrence with high accuracy, producing accurate hazard maps that can aid in landslide risk assessment and management (Salvatici et al. 2018).
Insufficient knowledge of the spatial distribution of hydrological and geotechnical parameters caused by the extreme heterogeneity and inherent variability of soil properties at large scales hinders the application of physically based models at regional scales.
The uncertainty related to hydrological and geotechnical parameters (such as cohesion, internal friction angle, and hydraulic conductivity) can be overcome using a probabilistic approach, supported by the combined use of Monte Carlo simulations. In this case, the output is a distributed probability of failure, i.e., the probability of having the factor of safety below a defined threshold (usually one).
The interpretation of the results is already problematic, since a calibration and validation procedure must be taken into account to define the value of the failure probability for distinguishing between stable and unstable pixels and, in view of possible application purposes, to transform the probabilistic results into warnings related to larger spatial units (e.g., catchments or warning zones). In order to provide reliable results to stakeholders involved in hazard management, it might be advisable to reaggregate across spatial units (e.g., catchments, slope units, and municipalities) and temporal units-a strategy followed by much work focused on operational applications of slope stability models. In particular, for spatial aggregation of probabilistic results, a calibration procedure must be performed to define how many pixels (over a value of failure probability to be defined) are required to consider a spatial unit unstable.
In this work, we apply the physically based HIRESSS (HIgh REsolution Slope Stability Simulator) model (Rossi et al. 2013) in the eastern portion of the Aosta Valley region (Italy), in order to test the capacity of the model to forecast the occurrence of shallow landslides at the regional scale. In particular, the HIRESSS code will be tested in back-analysis, modelling a rainfall event that has occurred in 2009 and that triggered several shallow landslides in the study area. The specific objectives of the study are: (i) model set-up, (ii) analysis and validation of the model outcome.
2 HIRESSS Model and Study Are a
2.1 HIRESSS Model
The HIRESSS model (Rossi et al. 2013) is composed of two different modules—hydrological and geotechnical. The hydrological model receives the rainfall data as dynamical input and provides the pressure head as a perturbation to the geotechnical model, that provides results in terms of failure probabilities. The structure of the software is inspired by the work of Iverson (Iverson 2000) also used in the TRIGRS software. The hydrological model is based on an analytical solution of an approximated form of Richards equation under the wet condition hypothesis, and it is introduced as a modelled form of hydraulic diffusivity. The geotechnical model is based on an infinite slope model that considers the unsaturated conditions. During the stability analysis, the proposed model considers the increase in strength and cohesion due to matric suction in unsaturated soil due to negative pressure head. Moreover, the soil mass variation on partially saturated soil caused by the water infiltration is modelled. The model then provides for Monte Carlo simulations to manage the typical geotechnical parameters uncertainty. The Monte Carlo simulation manages a probability distribution of the input parameter, and the ending results of the simulator are slope failure probabilities. Applications of HIRESSS in different geological-geomorphological contexts and soil typologies have been presented in Rossi et al. 2013; Tofani et al. 2017; Salvatici et al. 2018; Cuomo et al. 2021.
The HIRESSS model needs the following spatially distributed input data: slope gradient, effective cohesion, root cohesion, friction angle, dry unit weight, soil thickness, hydraulic conductivity, initial soil saturation, soil water retention curves, and rainfall intensity.
HIRESSS considers the effect of the root reinforcement to the stability of slopes. The root reinforcement was modelled as a component of the total cohesion of soil (e.g., Operstein and Frydman 2000; Giadrossich et al. 2010). Original FS (factor of safety) equations (Rossi et al. 2013) were modified considering the root reinforcement (Masi et al. 2023).
The HIRESSS model has several features that make it suitable for landslide prediction at regional scale and an important tool for early warning such as (i) the capability of computing the factor of safety at each time step and not only at the end of the rainfall event; (ii) the variable-depth computation of slope stability; (iii) high processing speed even for extensive area analysis; (iv) high spatial and temporal resolution.
2.2 Study Area
The Valle d’Aosta region (3200 km2) is part of the alpine chain, passing through the principal Europe-vergent Austroalpine-Penninic structural domain of the Western Alps. The geomorphology of the study area is characterized by steep slopes and valleys shaped by glaciers. The glacial modelling is shown in the U-shape of the Lys and Ayas valleys, and the erosive depositional forms found in the Ayas Valley. The three valleys’ watercourses, the Lys Creek, the Evançon Creek, and the Dora Baltea River, contributed to the glacial deposits modelling with the formation of alluvial fans.
The region is very prone to landslides due to the high steepness of slopes and abundant mean annual precipitation (800–900 mm/y during the decade 2000–2009): rockfalls, deep-seated gravitational slope deformations, rocks avalanches, debris avalanches, debris flows, and debris slides are the main mass movements to which the area is subjected.
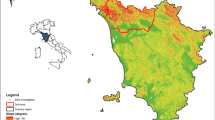
As typical in alpine valleys, the study area has a prevalence of highly vegetated areas, while human settlement distribution is located at the valley bottom. The land cover is prevalently represented by forest, natural grassland, and rocky outcrops with little or no vegetation (Fig. 1).

The HIRESSS model has been tested in a portion of the Valle d’Aosta region, the eastern part called “alert zone B” by the regional civil protection authorities. The area is characterized by three main valleys: Champorcher Valley, Gressoney or Lys Valley, and Ayas Valley. The first is located on the right side of the Dora Bal- tea catchment and represents the southern part of the study area. The second and third valleys show a north–south orientation and are delimited to the north by Monte Rosa Massif (4527 m a.s.l.) and to south by the Dora Baltea River.
This area has been affected in 2009 by an intense rainfall event. In particular between the 26 and the 28 of April 2009 highly intense rainfall and snowfall had fallen in the Alert zone B causing multiple landslides (9 landslides of different types in the Alert zone B were reported, 26 landslides in the Region) with a maximum of rainfall of 268 mm in three days was recorded by on the meteorological station in the area.
3 Data Collection and Preparation
The input parameters can be divided in two classes: the static data and the dynamical data. Static data are geotechnical and morphological parameters while dynamical data are represented by the hourly rainfall intensity.
The HIRESSS input is in raster, which means that point data and parameters have to be adequately spatially distributed. In this application the spatial resolution was 10 m.
The soil parameters were derived from the in situ and laboratory geotechnical tests and analysis.
3.1 Static Data
The slope gradient was calculated from the a DEM with a resolution of 10 m. Effective cohesion, friction angle, hydraulic conductivity, effective porosity, and dry unit weight were obtained and spatialized according to lithology. The soil parameters were derived from the in situ and laboratory geotechnical tests and analysis.
In particular, the properties of slope deposits were deter- mined by in situ and laboratory measurements (Bicocchi et al. 2016; Tofani et al. 2017) at 12 survey points.
Location of survey points and results of the measurements are reported in Fig. 1 and Table 1 respectively.
Details about data collection from the in-situ surveys to the laboratory analyses and methods of data elaboration to product input maps had been reported in Salvatici et al. (2018).
Root cohesion variation map had been elaborated using for the plant species distribution the land use map Corine Land Cover 2012. Values adopted for the simulations varies from 0.1 to 19 kPa.
3.2 Dynamic Data
The dynamic data consist of the precipitation intensities read by the model to calculate the soil saturation and consequently the matrix suction and pressure head of each pixel for each time step. The initial distribution of soil saturation can be provided to the model if available. Otherwise, it is possible to insert an initial soil saturation of zero for each pixel of the area, the model starts at zero and, through the hydrological equations on which it is based, calculates the soil saturation for each time step. It is worth noting that zero soil saturation is not realistic even for very permeable coarse soils, especially under the climatic conditions of the study areas. Therefore, it is important to have sufficient backward extension of precipitation data with respect to a given time period of interest for the simulation to ensure that the saturation conditions reconstructed by the hydrological model are hardly affected by the notional initial soil saturation (Masi et al. 2023).
In the study area of the Valle d’Aosta, the hourly rainfall data from 27 rain gauges were available. The rainfall data had been elaborated applying the Thiessen polygon methodology (Rhynsburger 1973) modified to consider catchment basins to spatialize the data set and generate the raster maps (Salvatici et al. 2018). The periods of rainfall considered to perform the stability simulations is from 02/04/2009 to 30/04/2009.
Between April 26 and 28, 2009, the VdA region experienced intense rainfall that particularly affected the southeastern areas and caused numerous landslides.
The Lillianes Granges weather station recorded 268 mm of cumulative rainfall over the three days, 208 mm of which fell on April 27 alone (Fig. 2).

Intensity and cumulative rainfall per day from for second till 30th of April 2009. Daily and cumulative rainfall referring to the whole area had been calculated as mean values of the data registered by the 27 rain gauges
4 HIRESSS Simulation and Analysis of the Results
The HIRESSS input data were entered into the HIRESSS model to obtain hourly or daily maps of the landslide occurrence.
4.1 Monte Carlo Simulations
A study on the preferable number of Monte Carlo iterations had been performed. The Monte Carlo iterations performed by HIRESSS to manage the spatial uncertainty of the input parameters is a fundamental aspect of the forecasting procedure, the setting of which strongly affects the resulting failures probabilities. The higher the number of iterations, the higher the reliability of the forecasts. On the other hand, a higher number of iterations considerably slows down the processing calculations, so that the question here is finding the best compromise between processing time and reliability of the results (Masi et al. 2023).
To determine an appropriate number of iterations in the context of the present study, four simulations of the Valle d'Aosta 2009 event were performed with the same input values of the parameters but with different numbers of iterations (10, 100, 1000, 10000 shoots). The simulation results were then compared considering the number of unstable pixels calculated in the three cases for the same days of the event and the processing times (Fig. 3). The caution value of 1.2 for the safety factor and 80% for the failure probability (FP) were chosen as the threshold values for the instability of a pixel. The threshold of 80% was chosen based on previous HIRESSS applications (Rossi et al. 2013; Salvatici et al. 2018).

Results of simulations with a different number of Monte Carlo iterations. Colored curves represent trend of unstable pixels (resulting having a daily max failure probability higher than 80%) (modified from Masi et al. 2023)
The difference between the 10- simulation and the 100- simulation resulted in about 100000 fewer unstable pixels for the latter, while there was an average difference of 25000 pixels between the 100s simulation and the 1000s simulations (again, the simulation obtained by a higher number of iterations had fewer unstable pixels). In contrast, the differences between the 1000 simulation and the 10000 simulation were so small that they can be considered negligible, while they represent a significant difference in terms of processing time. The 1000 simulation took 2346 min (39 h), while the 10000 simulation took 21039 min (350 h). The convergence of the results and the quite different processing times led to the choice of 1000 iterations for the successive simulations.
4.2 Analysis of the Model Output and Validation
The simulation of the 2009 event was carried out at 1000 Monte Carlo iterations with a resolution of 10 m × 10 m.
To validate the model outcomes the inventory, comprise 9 landslides, recorded as points or instability areas.
The HIRESSS output selected for validation is the 24-hr map of failure probabilities for the day of April 27 (Fig. 4). The 24-h step was preferred over the 1-h step in view of the fact that the temporal localization of occurred events rarely achieves such accuracy. Within the range of three days on which the disruptions are reported (April 26-28), the day of April 27 was selected, during which the most intense precipitation peaks were recorded.

HIRESSS 24-hr map of failure probabilities for the day of April 27
The study area was subdivided into sub-basins (Fig. 5) whose dimensions were set in order to be able to contain the average size of the typical shallow landslides in the area and at the same time not to be too large.

Spatial units with more than 250 pixels with failure probability equal to 80%. Green points and areas are landslides, black lines are spatial units
The shapefile produced and selected for the purpose of spatial aggregation is characterized by sub-basins whose most downstream node collects the flow of at least 3000 pixels, this threshold allowed to obtain spatial units whose average size is equal to 0.37 km2.
Finally, the spatial units were superimposed on the polygons of the rain gauges in the area in order to exclude sub-basins that were within the polygons for which rainfall data for the period April 2-30, 2009 are not available (due to temporary malfunctions of the data collection systems some rain gauges may not present continuous rainfall data), since the landslide triggering probabilities calculated by HIRESSS for these areas are for obvious reasons unreliable.
In order to carry out the calibration procedure and to identify how many pixels are necessary to define a spatial unit unstable three different combination of threshold of failure probability and number of pixels have been defined; 80%/250 pixels, 80%/300 pixels, 80%/350 pixels.
The final stage of the test related to the spatial aggregation of the outputs consisted of validating the different pairings of pixel number/probability threshold by spatial comparison of the spatial units identified as unstable according to the different combinations and the location of the actual landslide events resulting in the construction of the contingency table (data related to correct alarms, missed alarms, false alarms, correct non-alarms) (Table 2).
The combination that returned the highest value of correct alarms was the one that predicted the value of 250 pixels with failure probability greater than 80% as the threshold of instability, with 88.9% true positives the modeling in this case was able to predict 8 landslides out of the 9 recorded in reality. At the same time this combination produced the highest value of false alarms, which was 13.9% in this case. The lowest value of false alarms was found for the 80%/350 pixel pairing, a combination that also, however, produced the lowest value of correct alarms, with 66.7% true positives such aggregation allowed the modeling to detect 6 out of 9 landslides.
It is worth noticing that the distribution of the landslide events recorded and used for validation are all located near the most important infrastructures in the area: this leads to the hypothesis that the landslide database used lacks all those events that although they occurred (during the three days investigated April 26–28) were not recorded because they occurred in more remote areas and therefore were not intercepted. This hypothesis could likely be the cause of the values of correct and false alarms found, which while good do not match the potential of the modeling procedure using HIRESSS and aggregation that have been verified in other contexts.
5 Conclusion
The HIRESSS code (a physically based distributed slope stability simulator for analyzing shallow landslide triggering conditions in real time and over large areas) was applied to the eastern sector of the Aosta Valley region in order to test its capability to forecast shallow landslides at the regional scale. The model was applied in back analysis for an event occurred in 2009.
In order to run the model two campaigns of on-site measurements and laboratory experiments were performed at 12 survey points. The data collected contributed to the generation of an input map of parameters for the HIRESSS model according to lithological classes. The effect of vegetation on slope stability in terms of root reinforcement was also taken into account, based on the plant species distribution and literature values of root cohesion, to product a map of root reinforcement of the study area.
The outcomes of the model are daily failure probability maps with a spatial resolution of 10 m. The HIRESSS code incorporates the Monte Carlo simulation in order to take into account the uncertainty of input parameters.
The test on the number of Monte Carlo iterations showed that the best compromise between the accuracy of the results and the time required for HIRESSS to conclude the processing is represented by the value of 1000 iterations: in fact, requiring the model to perform this number of iterations gives results not dissimilar to those obtainable through 10000 iterations but in a considerably shorter time.
The aggregation procedure was applied and validated with reference to the event of intense rainfall that occurred in alert area B between April 26 and 28, 2009 on HIRESSS model outputs obtained through 1000-iterations simulation. The procedure involved classifying spatial units according to different thresholds of number of pixels contained within their perimeter having model-calculated failure probabilities greater than 80%.
The best result between high value of correct alarms (TP) and low value of false alarms (FP) produced by the aggregation procedure was obtained with the combination probability of triggering 80%/250 pixels within the 2009 event (24h output of April 27, 2009) with 88.9% and 13.9% respectively.
The application has also highlighted some drawbacks that are mainly related to the validation of the model performance. In particular, a satisfactory validation of the model is only possible if a complete event database of landslides with spatial and temporal resolution equal to the HIRESSS model resolutions is available.
References
Aleotti P (2004) A warning system for rainfall-induced shallow failures. Eng Geol 73:247–265. https://doi.org/10.1016/j.enggeo.2004.01.007
Arnone E, Noto L, Lepore C, Bras R (2011) Physically-based and distributed approach to analyze rainfall-triggered landslides at watershed scale. Geomorphology 133:121–131
Baum RL, Godt JW, Savage WZ (2010) Estimating the timing and location of shallow rainfall-induced landslides using a model for transient unsaturated infiltration. J Geophys Res 118:1999–1999. https://doi.org/10.1029/2009JF001321
Baum RL, Savage W, Godt J (2002) Trigrs: a fortran program for transient rainfall infiltration and gridbased regional slopestability analysis. Open-file Report, US Geological Survey, 2002
Bicocchi G, D’Ambrosio M, Rossi G, Rosi A, Tacconi-Stefanelli C, Segoni S, Nocentini M, Vannocci P, Tofani V, Casagli N, Catani F (2016) Shear strength and permeability in situ measures to improve landslide forecasting models: a case study in the eastern Tuscany (Central Italy). In book: landslides and engineered slopes. Experience, theory and practice, 419–424, https://doi.org/10.1201/b21520-42
Cuomo S, Masi EB, Tofani V, Moscariello M, Rossi G, Matano F (2021) Multiseasonal probabilistic slope stability analysis of a large area of unsaturated pyroclastic soils. Landslides 18(4):1259–1274. https://doi.org/10.1007/s10346-020-01561-w
Giadrossich F, Guastini E, Preti F, Vannocci P (2010) Metodologie sperimentali per l’esecuzione di prove di taglio diretto su terre rinforzate con radici. Experimental methodologies for the direct shear tests on soils reinforced by roots. Geol Tecnica Ambientale 4:5–12
Iverson RM (2000) Landslide triggering by rain infiltration. Water Resour Res 36(7):1897–1910. https://doi.org/10.1029/2000WR900090
Lagomarsino D, Segoni S, Fanti R, Catani F (2013) Updating and tuning a regional-scale landslide early warning system. Landslides 10(1):91–97
Lu N, Godt J (2008) Infinite slope stability under steady unsaturated seepage conditions. Water Resour Res 44:11
Martelloni G, Segoni S, Fanti R, Catani F (2012) Rainfall thresholds for the forecasting of landslide occurrence at regional scale. Landslides 9(485–495):485–495. https://doi.org/10.1007/s10346-011-0308-2
Masi EB, Tofani V, Rossi G, Cuomo S, Wu W, Salciarini D, Caporali E, Catani F (2023) Effects of roots cohesion on regional distributed slope stability modelling. Catena 222:106853. https://doi.org/10.1016/j.catena.2022.106853
Operstein V, Frydman S (2000) The influence of vegetation on soil strength. Proceedings of the Institution of Civil Engineers-Ground Improvement 4(2):81–89
Pack R, Tarboton D, Goodwin C (2001) Assessing terrain stability in a GIS using SINMAP. In: 15th Annual GIS Conference, GIS, 2001
Park HJ, Lee JH, Woo I (2013) Assessment of rainfall-induced shallow landslide susceptibility using a GIS-based probabilistic approach. Eng Geol 161:1–15
Rhynsburger D (1973) Analytic delineation of Thiessen polygons. Geogr Anal 5(2):133–144. https://doi.org/10.1111/j.1538-4632.1973.tb01003.x
Rossi G, Catani F, Leoni L, Segoni S, Tofani V (2013) HIRESSS: a physically based slope stability simulator for HPC applications. Nat Hazards Earth Syst Sci 13:151–166
Salciarini D, Fanelli G, Tamagnini C (2017) A probabilistic model for rainfall-induced shallow landslide prediction at the regional scale. Landslides 14:1731–1746
Salvatici T, Tofani V, Rossi G, D'Ambrosio M, Tacconi Stefanelli C, Masi EB, Rosi A, Pazzi V, Vannocci P, Petrolo M, Catani F, Ratto S, Stevenin H, Casagli N (2018) Regional physically based landslide early warning modelling: soil parameterisation and validation of the results. Nat Hazards Earth Syst Sci 18:1919–1935. https://doi.org/10.5194/nhess-18-1919-2018
Simoni S, Zanotti F, Bertoldi G, Rigon R (2008) Modelling the probability of occurrence of shallow landslides and channelized debris flows using geotop-fs. Hydrol Process 22:532–545
Tofani V, Bicocchi G, Rossi G, Segoni S, D’Ambrosio M, Casagli N, Catani N (2017) Soil characterization for shallow landslides modeling: a case study in the northern Apennines (Central Italy). Landslides 14:755–770. https://doi.org/10.1007/s10346-017-0809-8
Acknowledgments
This research has been carried out in the framework of a research agreement between the Civil Protection Center of the University of Florence and Aosta Valley regional administration. The authors are grateful to Ascanio Rosi, Michele D’ambrosio, Carlo Tacconi Stefanelli and Pietro Vannocci for their help in the field work and laboratory analysis.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this chapter

Cite this chapter
Tofani, V., Masi, E.B., Rossi, G. (2023). Physically-Based Regional Landslide Forecasting Modelling: Model Set-up and Validation. In: Alcántara-Ayala, I., et al. Progress in Landslide Research and Technology, Volume 2 Issue 2, 2023. Progress in Landslide Research and Technology. Springer, Cham. https://doi.org/10.1007/978-3-031-44296-4_4
Download citation
DOI: https://doi.org/10.1007/978-3-031-44296-4_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-44295-7
Online ISBN: 978-3-031-44296-4
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)