
Abstract
Driving safety has been improved by automated vehicles, particularly in terms of human error-related accidents, which are considered one of the main causes of traffic accidents. However, despite the increase in the number of sensors, full automation still generates conflictive situations where driver intervention is necessary. Many maneuvers are unique and sometimes unrepeatable, due to the multiple factors involved, being the patterns observation for the development of models and their automation complicated. To achieve greater knowledge of the performance during complex maneuvers on interurban roads, this article proposes the development of a deterministic driving model based on real driving data. The intentional phase prior to the maneuver has been studied in detail thanks to information from the driver’s visual behavior.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Automated driving systems have improved the vehicle fleet, making the environment safer and reducing the number of accidents [1]. However, the lack of robustness of these systems implies a delay in their progress, given the lack of confidence that they sometimes generate in pedestrians and drivers [2, 3].
In order to achieve a good integration into society and traffic, these systems have been developed based on models which describe how a driver makes decisions facing different events. Driving models are usually divided mainly into two phases, (i) car-following, which determines the acceleration rates of a vehicle based on factors generally related to the preceding vehicle, and (ii) lane-change, which determines how and when a vehicle moves from one lane to another [5].
Regarding the variables used by driving models, several authors focus on the physical parameters evaluation through experimental tests, such as position and velocity, obtained mainly from Global Positioning Systems (GPS) [6, 7]. On the other hand, the physiological parameters acquisition of the driver can enhance the decision rules that compose the algorithms of the decision-making models. One of the most widely used systems, for its lightness and comfort in driving, is the visual tracking. The information acquired by the driver precedes the cognitive processes, being able to anticipate a driver’s decisions through his attention. Similarly, eye behavior provides information on the acceptability and distraction of systems, being extensively used in the evaluation of ADAS [8,9,10].
In this paper, a deterministic driving model focused on highways has been developed, to obtain information about the main parameters involved in decision making, specifically in lateral maneuvers. Through visual behavior, glances at the rear-view mirrors, especially the left one, are studied, which are considered an indicator of lane change intention in this study. The data have been collected from real traffic through several instrumented vehicles and a visual tracking system on the main driver.
2 Driving Model
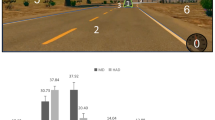
The main objective of this paper is to analyze driver behavior in complex situations such as overtaking on a highway. For this purpose, a driving model for decision making has been developed, considering the actions of car-following, lane change and emergency braking for an interurban environment [11]. The decisions of the model are based mainly on the velocity, distance and time of each vehicle with respect to the ego vehicle, 1, where v2, t2, d2 correspond to vehicle 2 and vi, ti, di, to the vehicles located in the left lane. To ensure that the ego-vehicle chooses the most convenient gap in lane changing, the accelerations and decelerations necessary to enter each of the gaps are calculated. An example of the arrangement of vehicles can be seen in Fig. 1, where vehicle vi would correspond to vA, vi+1 to vB and vi+2 to vC.

Definition of the position of the vehicles.
The algorithm operation is based on the distance to the vehicle in front, which determines the switch between car-following and lane-change conditions. At this point, the intention to change lanes is considered, based on the maximum speed of the road, the average speed of the vehicles in the left lane, the speed of vehicle 2 and the minimum braking time. In case of overtaking, the algorithm would count the vehicles placed in the left lane. Depending on the arrangement of these vehicles, the lane change could be made in front of the first, between the first and the second, between the second and the third, etc. One of the main advantages of this algorithm is that there is no maximum number of participating vehicles, being able to perform infinite iterations until finding a suitable gap to perform the maneuver safely. If no suitable and safe gap is found, it would go back to the beginning of the main loop, waiting for an optimal gap and assuming the car-following action with the change intention.
3 Experiments
A total of 5 vehicles have participated in the evaluation of the driving model, where 1 is the ego vehicle, 2, the front vehicle, and A, B and C are the vehicles located in the left lane of the road.
To feed the model, position and velocity data were collected by means of Global Positioning Systems (GPS) located in each of the participating vehicles. The constant variables of the vehicle and driver have been collected from the literature [12,13,14,15], subsequently adding a probabilistic effect in a Gaussian distribution as a function of the impulsivity of each subject [16].
3.1 Participants
A total of 22 driving tests were performed, corresponding to 12 men and 10 women, whose average age was 33.81 years (SD = 6.98). The participants reported a mean of 14.09 years of driving experience (SD = 5.78), being passenger car the most used vehicle (68.18%), followed by motorcycle (22.73%) and SUV type vehicles (9.09%). Most drivers reported driving between 10,000 and 20,000 km per year.
Since the nature of this study is closely linked to driving styles, the features of impatience, aggressiveness and impulsivity have been analyzed by means of a survey [17] with the aim of being able to cover the widest spectrum of different profiles and palliating the effects of the small and homogeneous sample. Each feature was scored out of 10, obtaining an average of 5.64 for impatience (SD = 1.55), 4.07 for aggressiveness (SD = 1.41) and 4.78 for impulsivity (SD = 1.43).
3.2 Instrumentation
The vehicle analyzed, which executes the maneuver, previously called vehicle 1, is a Peugeot 307 with automatic gearbox.
The ocular responses of the drivers have been recorded using an eye tracking system, consisting of two cameras and two infrared sensors in each eye, acquiring mainly the pupil diameter and the fixations.
Five vehicles involved were instrumented with a GPS acquiring real-time data through the M5-Stack device, which is based on the ESP32 SoC (System On a Chip).
3.3 Procedure
An interurban road section of 7.5 km belonging to the M-45 highway in Madrid was used for the experiments. The duration ranged from 35 to 55 min depending on the traffic and the number of journeys necessary to simulate each case safely. The scenarios are summarized as car-following with and without change intention, and overtaking, classified as: lane change without vehicles (C1), lane change in front of A (C2), lane change behind A (C3), lane change between A and B (C4), lane change between B and C (C5), and lane change behind C (C6).
Prior to the experiments, the participants were instructed to drive as naturally as possible, without further information, in order to avoid suggestion when overtaking. The execution of the maneuvers was randomized, adapting each one to the available traffic. The test design was intrasubject, with each participant performing all the proposed scenarios at least once.
4 Results
The proposed experiments were satisfactorily carried out, despite the variations in traffic. The results obtained in the driving style survey showed that the selected sample was diverse and balanced. The proposed scenarios were repeated between 1 and 4 times by each participant, obtaining an overall mean of 1.77 times, with scenario C2 being the most repeated and C6 the least. In relation to this result, there were 9.81% of unsuccessful maneuvers of the total number, either because of external vehicles in the convoy or because the participant decided not to perform it.
Visual behavior indicated an increase in glances to the left rearview mirror of 13.2504 s on average before crossing the center line of the road during the maneuver (SD = 5.0827), occasionally combined with glances to the inside rearview mirror. The number of glances per second was calculated obtaining an average of 0.4425 and a standard deviation of 0.1835. This data along with the previous one shows that the average number of glances to the rearview mirror is below 6, matching the following frequency graph (see Fig. 2).

Frequency of glances to the left rearview mirror in the anticipation period.
There were situations where the minimum number of glances at the mirror was 1 or 2 times, 4.85% and 10.53% with respect to the total. However, in most cases there were higher values, as can be seen in the previous figure (Fig. 2).
5 Conclusions
The characterization of driver behavior based on decision-making models can help in the development of more naturalistic algorithms supporting the integration of autonomous vehicles in mixed traffic. In this study, a deterministic driving model focused on conflicting situations such as overtaking on highways has been developed. The results of real driving overtaking showed that the most repeated condition was the lane change in front of the first vehicle of the convoy in the left lane and the least repeated condition was the lane change behind the last vehicle in the queue. This fact supports the complexity of the last situation, in which all vehicles are involved to perform the maneuver.
Regarding ocular behavior, an increase in glances at the left rear-view mirror prior to overtaking was observed, which is a clear indicator of cognitive preparation for the maneuver. Some drivers also relied on the interior mirror since its width allowed a global knowledge of the scene. The glance sequences ranged according to the environmental complexity and the time exposed, with a glance around every two seconds.
Driver behavior variables contribute to the characterization of the maneuver performance in a driving model, such as lane changing. In-depth knowledge of driver intentions could help the creation of new decision rules in the improvement of driving algorithms for autonomous vehicles.
References
Cicchino, J.B.: Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates. Accid. Anal. Prev. 99(Pt A), 142–152 (2017). https://doi.org/10.1016/j.aap.2016.11.009
Terrones Rodríguez, A.L.: Una aproximación general al desarrollo de los coches autónomos. Revista Iberoamericana de Ciencia, Tecnología y Sociedad 16(47), 153–175 (2021)
Ammoun, S., Nashashibi, F.: Real time trajectory prediction for collision risk estimation between vehicles. In: IEEE 5th International Conference on Intelligent Computer and Communication Processing, pp. 417–422 (2009)
Alawadhi, M., Almazrouie, J., Kamil, M., Khalil, K.A.: A systematic literature review of the factors influencing the adoption of autonomous driving. Int. J. Syst. Assur. Eng. Manag. 11(6), 1065–1082 (2020). https://doi.org/10.1007/s13198-020-00961-4
Toledo, T.: Driving behaviour: models and challenges. Transp. Rev. 27(1), 65–84 (2007). https://doi.org/10.1080/01441640600823940
Brummelen, V.J., O’Brien, M., Gruyer, D., Najjaran, H.: Autonomous vehicle perception: the technology of today and tomorrow. Transp. Res. Part C: Emerg. Technol. 89, 384–406 (2018). https://doi.org/10.1016/j.trc.2018.02.012
Orlovska, J., Novakazi, F., Lars-Ola, B., Karlsson, M., Wickman, C., Söderberg, R.: Effects of the driving context on the usage of Automated Driver Assistance Systems (ADAS)—Naturalistic Driving Study for ADAS evaluation. Transp. Res. Interdisc. Perspect. 4(100093) (2020). https://doi.org/10.1016/j.trip.2020.100093
Azevedo-Sa, H., Zhao, H., Esterwood, C., Yang, X.J., Tilbury, D.M., Robert, L.P.: How internal and external risks affect the relationships between trust and driver behavior in automated driving systems. Transp. Res. Part C: Emerg. Technol. 123 (2021). https://doi.org/10.1016/j.trc.2021.102973
Sánchez-Mateo, S., Pérez-Moreno, E., Jiménez, F.: Driver monitoring for a driver-centered design and assessment of a merging assistance system based on V2V communications. Sensors 20(19), 5582 (2020). https://doi.org/10.3390/s20195582
Sánchez–Mateo, S., Pérez-Moreno, E., Jiménez, F., Naranjo, J.E., Pérez-Flores, C.G., Antoñazas-Teruel, J.: Study of a driver assistance interface for merging situations on highways. In: IEEE International Conference on Vehicular Electronics and Safety (ICVES), pp. 1–5 (2018). https://doi.org/10.1109/ICVES.2018.8519495
Zhang, K., Lu, N., Shi, Z.: Motion planning in lane change scenario for autonomous vehicles. In: China Automation Congress (CAC), pp. 7075–7080 (2021). https://doi.org/10.1109/CAC53003.2021.9728035
Prestl, W., Sauer, T., Steinle, J., Tschernoster, O.: The BMW active cruise control ACC. SAE Technical Paper 2000-01-0344, SAE World Congress (2000). https://doi.org/10.4271/2000-01-0344
Sánchez, F., Seguer, M., Freixa, A., Andreas, P., Sochaski, K., Holze, R.: From adaptive cruise control to active safety systems. SAE Technical Paper 2001-01-3245, SAE World Congress (2001). https://doi.org/10.4271/2001-01-3245
Burgett, A., Carter, A., Preziotti, G.: An algorithm for read-end collision avoidance warning systems. In: 17th International Technical Conference on the Enhanced Safety of Vehicles, Amsterdam (2001)
Sens, M.J., Cheng, P.H., Wiechel, J.F., Guenther, D.A.: Perception/reaction time values for accident reconstruction. SAE Technical Paper 890732. SAE World Congress (1989). https://doi.org/10.4271/890732
McAree, O., Aitken, J.M., Veres, S.M.: Towards artificialsituation awareness by autonomous vehicles. IFAC-PapersOnLine 50(1), 7038–7043 (2017). https://doi.org/10.1016/j.ifacol.2017.08.1349
Pérez-Moreno, E., Hernández-Lloreda, M., Gallego-Largo, T., Castellanos, M.: Impulsive driving: definition and measurement using the i-driving scale (IDS). Spanish J. Psychol. 18, E93 (2015). https://doi.org/10.1017/sjp.2015.98
Acknowledgments
This work is part of project PID2019-104793RB-C33 funded by MCIN/AEI/10.13039/501100011033, and project PDC2022-133684-C32 funded by MCIN/AEI/10.13039/501100011033 and Unión Europea Next Generation EU/ PRTR.
The performance of the experimental tests would not have been possible without the collaboration of the drivers who recreated the proposed lane change maneuvers. We would like to thank all of them for their participation.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Sanchez-Mateo, S., Valle-Barrio, A., Díaz-Álvarez, A., Jiménez, F. (2023). Assessing a Deterministic Model for Autonomous Driving Through Visual Behavior. In: Vizán Idoipe, A., García Prada, J.C. (eds) Proceedings of the XV Ibero-American Congress of Mechanical Engineering. IACME 2022. Springer, Cham. https://doi.org/10.1007/978-3-031-38563-6_23
Download citation
DOI: https://doi.org/10.1007/978-3-031-38563-6_23
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-38562-9
Online ISBN: 978-3-031-38563-6
eBook Packages: EngineeringEngineering (R0)