
Abstract
Failure analysis of farm tractor’s engines and internal combustion engines is done using vibration analysis due to its efficiency and because it is not invasive to the engine operation. In this work, engine failures are studied based on failures of the injectors opening pressure. The vibration data was obtained by a sensor located in the cylinder block close to the compression chamber. The Fast Fourier Transform (FFT) was applied to obtain characteristics in each engine operating status (injector failures). With the statistical analysis, the characteristics are selected for the classification of the engine status and later failures prediction. The results demonstrate the validity of the proposed method.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Agricultural vehicles have an internal combustion engine, which currently can be monitored in real time using sensors. Engine monitoring can provide large amounts of data containing dynamic, combustion, fluid flow processes and major events of current engine conditions, with this data failure detection can be achieved, thus preventing further damage to the engine, as well as reducing engine performance [1].
Different studies have been carried out on the prediction, evaluation and diagnosis of machine failures using artificial intelligence techniques. Artificial Neural Network (ANN) and a humidity sensor were used for modeling sensor failures applying different temperatures [2]. The Wavelet transform and an ANN classifier to predict failures were used to evaluate bearing operating condition monitoring performance [3]. Several authors used sensors and diagnose motor failures, using the Wavelet packet transform, NN and spectrograms for the autonomous prediction of failures [4, 5]. In the same way there are predictive maintenance techniques based on vibrations to know the state of the engine [6]. Research on engine failure prediction mechanisms to reduce fuel consumption and exhaust emissions is vital and necessary [7].
Vibration in agricultural vehicle engines can be detrimental to their proper functioning, and vibration can affect the life of the engine [8]. Different studies focused on the reduction of maintenance costs, for example, for aircraft engines where they have an expenditure of 10.3% of the budget [9]. Thus, one of the objectives of predictive maintenance is to reduce this expense by using on-board sensors to monitor the health status of machine components. Predictive maintenance aims to identify potential malfunctions in advance, allowing a quick intervention before the actual problem arises. With condition-based maintenance, the aim is to schedule maintenance activities only when a functional fault is detected. Proactive maintenance puts primary emphasis on tracing all failures back to their root cause [10, 11].
To obtain measurements with different states, three levels of failure were simulated in the test bench that are in the injectors by adjusting the opening pressure and that directly affect the combustion and therefore the operation of the rest of the system.
2 Methodology
The data is obtained from a compression-ignition engine with three four-stroke cylinders that has an output of 51.2 HP. Four variables of engine operation at a single speed (idle) are studied. Vibration data is obtained using the ICP® 603C01 piezoelectric accelerometer. The signals are captured and processed using a DAQ NI 9250 data acquisition card with software designed in LabVIEW and they are stored in the computer to be processed. The characteristics obtained from each vibration signal are the number of data obtained per sample is 64,000 with a sampling frequency of 8,000 Hz.
The characteristics obtained from the vibration signal are inputs for the autonomous learning system where the different operating conditions of the motor are grouped. The considered conditions are: normal engine operation (BE) and failure in the opening pressure of the injectors with three levels of failure of opening of injectors 25% (ME25), 50% (ME50) and 75% (ME75). The variables considered have influence on the behavior of the engine, but they do not cause the engine to stop working (serious failure). Therefore, if the engine fails, the classification made in autonomous learning will group the defects according to the conditions entered: BE, ME25, ME50, ME75. Each feature for the different operating variables has 200 samples of 64,000 measurement points of vibration signals, where 80% of the samples are used to train learning and 20% to test and validate each case.
2.1 Decision Tree
It is a scheme that is used to decide and solve problems, to achieve this you must consider criteria and make decisions. Decision trees are a classification technique easy to interpret and use, which generate rules in the form of a tree, where the data set is divided into branches until segments of similar behavior are obtained depending on the target variable, and are used in decision making [12].
Decision trees allow to categorize a series of characteristics and parameters. In condition monitoring, and to guarantee the efficiency of this procedure, different operating conditions must be included, and ranges established for each of them [13].
This study will compare possible engine states mentioned above. The training of the decision tree was done using 5 statistical variables of the vibration signal (Median, Mode, Square Mean, Kurtosis and Asymmetry).
2.2 Obtaining Features
To obtain the characteristics is of vital importance in intelligent classification systems, several investigations have used different methods. This work is framed in the analysis of vibration, in the domain of time (the decision tree uses parameters of the time signal) and additionally a frequency analysis was performed. This methodology has been used by several studies [16]. For frequency analysis, the Fourier transform is traditionally used since it can convert a time domain signal into a frequency domain and thus be able to obtain information on frequencies and amplitude for raw signals.
The vibration data obtained in the time domain were transformed into the frequency domain. We recognized the dominant frequencies in each signal. The amplitude and frequency of each peak becomes the dominant characteristics based on frequency.
2.3 Extracted Characteristics
The extraction of the characteristics tries to filter the data with a high level of similarity [17, 18]. The vibration data obtained and characterized according to their state (BE, ME25, ME50 and ME75) are subjected to statistical calculations to determine the values to be used to perform the training, consequently, the important characteristics that contribute to the classifier to select patterns for prediction will be determined. For the different tests the engine revolutions will be considered according to the operating state (BE-850 RPM, ME25-850 RPM, ME50-900, ME75-1400 RPM). For the classification of failures, an intelligent system is created to predict failures in an engine according to the defined states (BE, ME25, ME50 and ME75).
3 Results
3.1 Feature Analysis
The vibration data obtained will be used in the classification of learning and subsequent failure prediction processes. Figure 1 shows the signal recorded for 0.8 s with an accelerometer, for each of the engine operating states: Good condition (BE) (a), ME25 (b), ME50 (c) and ME75 (d), where a considerable difference is observed compared to the change of engine speed (RPM). When causing a serious failure there are changes in the behavior of the engine and increases the RPM.
The characteristics for the conditions of the study (BE, ME25, ME50, ME75) are described below. Table 2 shows the values, in the frequency domain, extracted from the acquired vibration signal. There are 4 variables from which the characteristics were extracted directly from the sensor, and processed with the Fourier Transform, corresponding to the two amplitude values of the signal max. and their amplitude.

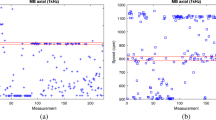
Raw signals
In Fig. 2 a) the area in which the characteristics will be taken is demonstrated to compare and carry out the research, in b) the characterization of the engine in BE status is shown where the main characteristics were selected, which in this study and for all the variables were 2 per sample. Considering (b) we proceed to analyze the other variables. In (c) where the same characteristics can be observed in the ME25 variable, but more pronounced peaks are noted which indicates that a failure may occur in the future, as shown in Table 1, the two characteristics are identical. In (d) presents the ME50 status a difference in the two characteristics is noted where it increases both in frequency and amplitude considering the Fig. 2 (b), having a considerable variation the damage to the engine is identified and in the same way the engine speed varies. The Fig. 2 (e) failure (ME75) a big difference can be noticed with the variable of good condition; this is because it is the strongest fault that can occur, and that the engine can start and work. In this way, characteristics are obtained to achieve adequate training patterns and predict failures of agricultural engines.
Figure 3 presents the scatter plot, which is a method of validation of learning where an efficiency of 95% is obtained and the distribution of the different characteristics obtained based on the variables studied is observed. It is not possible to differentiate or separate the points of the BE and ME25 classes that have similarity with respect to their variance and kurtosis characteristics. However, there is a clear difference of the classes in the characteristics of ME75, where the engine already has considerable failures in its operation, this failure would be the most severe that can be simulated.

Vibration characteristics

Scatter plot
4 Conclusion
An analysis of vibration signal characteristics (statistics of the temporal signal and the frequency domain) was carried out for the monitoring of failures in an agricultural vehicle engine. For this research, a methodology was proposed to diagnose engine failures based on three possible defects in the injectors that directly affect combustion. For the experimental part, a sensor located in the cylinder block as close to the combustion chamber was used that acquired the vibration data. The study is designed to distinguish four engine states: good condition (BE), poor condition varying 25%, 50% and 75% injector opening (ME25, ME50 and ME75).
Regarding the analysis of the characteristics of the signals in the frequency domain, we have worked with FFT analysis, on the frequency band delimited between 40 and 65 Hz, since it has been found that the characteristics are good indicators of state change, as shown in Fig. 3, where differences in amplitude values were observed for the case of BE and ME25 states with respect to ME50 and ME75. Regarding the characteristics of the time domain, they have been extracted from the measured vibration signals, and using trees decision it was concluded that, of all the statistical parameters calculated, the Quadratic Mean, Kurtosis and Asymmetry are the most interesting characteristics to monitor when trying to diagnose engine failures.
References
Ghazaly, N.M., et al.: Prediction of misfire location for SI engine by unsupervised vibration algorithm. Appl. Acoust. 192, 108726 (2022)
Souhil, K., et al.: ANN modeling of a smart MEMS-based capacitive humidity sensor. Int. J. Control. Autom. Syst. 9(1), 197–202 (2011). https://doi.org/10.1007/s12555-011-0125-3
Kumar, H.S., et al.: ANN based evaluation of performance of wavelet transform for condition monitoring of rolling element bearing. Procedia Eng. 64, 805–814 (2013)
Wu, J.-D., Chuang, C.-Q.: Fault diagnosis of internal combustion engines using visual dot patterns of acoustic and vibration signals. NDT E Int. 38(8), 605–614 (2005)
Yadav, S.K., Kalra, P.K.: Automatic fault diagnosis of internal combustion engine based on spectrogram and artificial neural network. In: Proceedings of the 10th WSEAS International Conference Robotics Control Manufacturing Technology ROCOM’10, pp. 101–107 (2010)
Delvecchio, S., Bonfiglio, P., Pompoli, F.: Vibro-acoustic condition monitoring of Internal Combustion Engines: a critical review of existing techniques. Mech. Syst. Signal Process. 99, 661–683 (2018). https://doi.org/10.1016/j.ymssp.2017.06.033
Taghizadeh-Alisaraei, A., Mahdavian, A.: Fault detection of injectors in diesel engines using vibration time-frequency analysis. Appl. Acoustic. 143, 48–58 (2019)
Böyükdipi, Ö., et al.: Experimental investigation and artificial neural networks based prediction of engine vibration of a diesel engine fueled with sunflower biodiesel – NH3 mixtures. Fuel 304, 121462 (2021)
de Pater, I., et al.: Alarm-based predictive maintenance scheduling for aircraft engines with imperfect remaining useful life prognostics. Reliab. Eng. & Syst. Saf. 221, 108341 (2022)
Girdhar, P., Scheffer, C.: Predictive maintenance techniques: Part 1 predictive maintenance basics, Practical machinery vibration analysis & predictive maintance, pp. 1–10 (2004)
Giordano, D., et al.: Data-driven strategies for predictive maintenance: Lesson learned from an automotive use case. Comput. Ind. 134, 103554 (2022)
Díaz, B., Meleán, R., Marin, W.: Academic performance of students in higher education: predictions of influential factors from decision trees. Telos 23, 616–639 (2021)
Moshkov, M.: Decision trees for regular factorial languages. Array 15, 100203 (2022)
Harmouche, J., et al.: Improved fault diagnosis of ball bearings based on the global spectrum of vibration signals. IEEE Trans. Energy Convers. 30(1), 376–383 (2015)
Singh, P., Basant, N., Gupta, S.: Support vector machines in water quality management. Anal. Chim. Acta 703(2), 152–162 (2011). https://doi.org/10.1016/j.aca.2011.07.027
Mafla, C., et al.: Predictive maintenance in agricultural tractors. Proposal of methodology oriented to connected maintenance. Ibero-Am. J. Mech. Eng. 26(1), 63–76 (2022)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Mafla-Yépez, C., Castejon-Sisamon, C., Rubio-Alonso, H. (2023). Vibration Analysis in Agricultural Vehicles for Fault Detection. In: Vizán Idoipe, A., García Prada, J.C. (eds) Proceedings of the XV Ibero-American Congress of Mechanical Engineering. IACME 2022. Springer, Cham. https://doi.org/10.1007/978-3-031-38563-6_11
Download citation
DOI: https://doi.org/10.1007/978-3-031-38563-6_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-38562-9
Online ISBN: 978-3-031-38563-6
eBook Packages: EngineeringEngineering (R0)