
Abstract
Numerous research projects are investigating direct current (DC) grids for supplying energy to production plants. The motivation is the higher efficiency and lower material requirements compared to conventional grid structures, as fewer electrical conversion processes occur, regenerative energies can be coupled in more efficiently and recuperation energy can be stored better. The grid form and the associated earthing concept require different protective devices. The publication simulates two possible grid forms and compares the efficiency with an approximated power curve of a production cell. The publication gives researchers and plant planners an impression of how such a network is designed and which components influence the efficiency. It serves as a decision-making aid for the selection of the grid form and helps with the design of the electrical components.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
1.1 Motivation of DC Grids Branches for Production Plants
Triggered by the electricity war between Thomas Alva Edison (1847–1931) and George Westinghouse (1846–1914), there was constant competition between direct and alternating current (AC) for energy transmission. The development of the transformer (1881) made it possible to transport energy more efficiently over long distances, which led, among other things, to the worldwide implementation of alternating current networks. Since then, the connections of electrical equipment have been based on the AC voltages customary in each country.
In the meantime, DC-powered technologies, like many renewable energies and storage systems, are appearing as energy providers in the decentralized grids. Although numerous operating devices use direct current internally. The lossy conversion and feeding of energy generated from renewable sources and storage in batteries into the alternating current grid takes place [1]. Very often, internal DC circuits are the basis of electronic components. A prime example of drive technology are powerful frequency converters. The modules operate with rectification in an intermediate circuit and subsequent inversion into a new voltage with variable frequency. With a DC network, the structure is reduced to an inverter, whereby the entire lossy rectification and the associated material costs are eliminated. This extended DC intermediate circuit with storage and consumers opens up the possibility of energy utilization of electrical braking energy, which is often only dissipated specifically in the form of heat via braking resistors [2,3,4,5]. In the industrial context, the introduction of DC grids can save around 10 to 12% of the total electrical energy per year [6].
In addition to energy savings, the need for electrically conductive material is also reduced. One factor is the changed topology of the DC grid with only two to a maximum of three current-carrying conductors instead of the four conductors required in the three-phase grid. A savings of up to 40% in conductive substances are predicted [7]. The elimination of numerous rectifiers and converters in equipment results in further material savings. Components with lower production costs and an associated saving in grey energy are feasible [8,9,10]. Furthermore, the control is simplified compared to AC grids, since the provision of reactive power is no longer necessary [11, 12]. Due to the increasing share of renewable energies in the overall energy mix, as well as through material reduction, the CO2 footprint is significantly reduced [4, 13, 14].
1.2 Status of International Research
DC intermediate circuits for the integration of electric drives already exist in the industrial context in rare cases as so-called multi-motor groups with a common DC intermediate [2]. In energy distribution, high-voltage direct-current transmission is used for long-distance transmission distances. In addition, there are further projects with other voltage levels in the supply networks [15]. Various research projects currently relate to the holistic conversion to decentralised DC grids for production plants, e.g. “DC-Smart” and “DC-INDUSTRIE” [3, 16], with the follow-up project “DC-Industrie2” or “DC-Schutzorgane” relating to protection concepts, components as well as the coupled earthing system [17, 18]. The SiC4DC project investigated the CO2 saving potential of wide-badgap semiconductors converters of a DC grid [19]. DC|hyPASim specifically investigates hybrid grid concepts with bidirectional energy flow between AC and DC grid [20]. Various studies exist on fault cases in the different grid types and the first prototypical reference systems from industry show the basic concept for specific applications for the grid form [21,22,23,24]. In terms of research, the publications address in detail the niche of simulating the efficiency for different operating points as a load in two grid forms with components available on the market. The design complies with the regulations, thus provide plant planners with a decision-making aid for the grid configuration and design from the perspective of energy efficiency.
2 Simulation Model
The simulation model is based on two rule-compliant designs for the opening of a DC voltage feeder with the nominal voltage of 650 V (unipolar). For this purpose, the loss characteristics of the necessary switching and protection organs as well as the bidirectional rectifier are modelled using a simplified mathematical approach. The analysis is designed for a nominal power consumption of 36 kW in duty type S1 (continuous operation) [25]. The efficiency is calculated continuously for all operating points up to 1.25 times overload (45 kW). The model and the simulations only refer to the steady state and are most accurate near the nominal point. The components for the two grid designs are based on components, which are largely available on the market.
2.1 Description of the Types of Grid Design
Basically, DC network branches can be opened via two different earthing concepts, earthed topologies (DC-TN) and isolated systems (DC-IT). In the earthed network branch, the negative pole of the DC network (DCN) is usually connected to the earth potential. In the event of an earth fault between the positive and DC pole (DCP), a low-impedance connection is created, which can lead to dangerous currents for people and secondary damage to objects and increases the risk of fire.
In conventional AC networks TT, TN-S, in parts of TN-C-S or the IT network, residual current devices (RCD) detect faulty residual currents between the active conductors of an AC network and other potentials such as the earth potential and disconnect the circuit within a few milliseconds without delay. This protective device does not exist in the DC-Link, as even all-current sensitive RCDs (RCD type A) are not suitable for DC voltages due to their function [5]. As an alternative protective measure for the DC-side, isolated networks (DC IT networks) are becoming more important in research. In the IT network, there is a galvanic separation, e.g. a transformer or power electronics with internal galvanic separation, which separates the fault current of the secondary side from the earth potential of the supply network, so that no dangerous body currents can occur in the event of an earth fault. The protection concept in the IT network provides for insulation monitors that ground the network to high impedance for measurement purposes and, if necessary, only issue an alarm in the first case of a fault and disconnect the network branch from the network in the second case of a fault. [21].
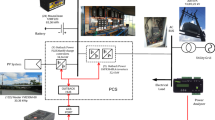
Figure 1 shows such a system structure according to symbols of [26]. Further necessary design differences between the DC-TN network and the DC-IT network are the number of DC fuses (dependent on conductor size and fault management), the AC fuses required in this case in the secondary part of the isolating transformer, the AC mains filter with earth coupling and the number of solid state circuit breakers (SSCB), which enable the DC network to open circuits in the shortest possible time (~10–20 µs) and thus counteract the development of fault currents and arcs. [6, 27].
In both systems, there is a circuit breaker on the AC side for safe isolation and for selective tripping in case of overcurrent, an optional and in some cases not compatible residual current circuit breaker (RCCB) type B, an active front end (combination of active line and active interface module, driven by an external control unit), an optional disconnector for safe isolation of the DC according to IEC 60204-1 [28], as well as a precharging circuit for limiting the inrush current of the capacitors in the DC circuit. The resistor of the precharging unit is only connected shortly of the mains starts and is consequently not considered for the simulation of the steady state.
In addition to the components of the load circuit shown, there is a 24 VDC control circuit that supplies the excitation current of the contactors (19 W each), the measurement technology (10 W in TN system, 22 W in IT system) and the control unit (24 W) of the power electronics.

Grid-circuit-diagram (left: DC-IT, right: DC-TN)
2.2 Modelling the Loss Characteristics
The modelling of the power loss is based on a simplified mathematical approach using the quadratic dependence between power loss and load. The approach can be derived from the electrical equivalent circuit of a source, a load and a series-connected loss resistor. A similar approach with this quadratic dependence can be found in issue 16 of the Siemens Technical Series Transformers [29]. Therefore, the relationship in Eq. (1) can be used for the approximation of the loss characteristics. Where PV and P are respectively the power dissipated and the power consumed.
For better comparability, the input power is related to the nominal power Pn. This only causes a scaling of the coefficients and results in Eq. (2). At the most components, b and c do not have a significant influence on the loss modelling.
The coefficients a and b characterize the load-dependent and c the non-load-dependent losses and must be derived for the respective components. They can be calculated considering different operating points of the respective component.
In [29] a similar approach is used (Eq. 3) to determine the power loss of the transformer. Pv,ll corresponds to the coefficient c and is referred to as no-load power and k as the power factor. The factors mentioned can be taken from the datasheet of the transformer [30, 31]. The loss characteristics of the Active Line and Interface Module can be found in [31]. The presented approach is implemented within MATLAB Simulink. Figure 2 shows the corresponding loss model of a network component. The model receives the total power P as input and calculates the power loss PV and the corresponding output power Pout.

Simulink model of a general component
2.3 Modelling the Grid System
The complete grid models are created by modelling, parametrizing and concatenating the individual components. The overall system receives as input the incoming power and returns the corresponding output power available to the load and the corresponding efficiency. The efficiency is calculated by setting the output power of in relation to the incoming power. The non-load dependent power of the control circuits is taken into account.
3 Results
This chapter creates transparency about the losses of the different design variants and thus provides plant planners with a decision-making aid. Figure 3 shows the losses of the individual components with the corresponding reference power. Switching and protective devices mainly consist of a resistive component, so that the losses increase quadratically with the current. The losses of the active front end mainly result from the load-independent switching losses and the load-dependent ohmic conduction losses of the power semiconductors (here IGBT with 8 kHz pulse frequency) as well as the internal device cooling. Significantly high are the losses of the transformer and the associated secondary circuit fuses, which only occur in IT network form, as well as the SSCB losses, which even occur twice in DC-TN architecture.

Components power losses (left: control, switching and protection, right: conversion)
3.1 Comparison of the Net Forms
As a result of the losses of the individual components, the total efficiency of the network forms is shown in Fig. 4 for the entire power range of the network. As expected, the grids are relatively efficient around the nominal point and inefficient at low load. Basically, there are fewer losses over the entire power range in TN architecture.

Comparison of efficiency of DC-IT and DC-TN form
As an application example Fig. 5 shows approximated measurements of a real power curve of a production cell supplied with AC. The simplified assumption is made that this power demand would be requested directly as a load on the 650 VDC mains feeders. Equivalent to the findings from Fig. 4, the low efficiency in partial load operation and of the IT network feeder is noticeable (efficiency DC-TN 95,5%, DC-IT 89,7%).

Comparison of efficiency of DC-IT and DC-TN form applied on an approximated power flow of an existing production plant
4 Conclusion
The paper introduced a simulation-based approach for planners on how to design DC energy networks for production plants. Firstly, the advantages of industrial energy grids are mentioned, including cost, material and energy savings. Furthermore, PV and energy storage can be integrated more easily. A simplified mathematical approach was used to determine the losses of the individual components depending on the incoming power. This allows conclusions to be drawn about the efficiency of the individual components and that of the system as a whole.
Along with efficiency, other decision criteria go into the selection of the network form. For example, the DC IT network is generally considered to be safer than the DC TN network, although the costs are often higher. Other selection criteria are electromagnetic compatibility and the possibility of integrating filters, availability/failure safety, and installation and maintenance aspects.
References
Dragicevic, T., Lu, X., Vasquez, J.C., et al.: DC Microgrids—Part II. IEEE Trans. Power Electron., 3528–3549 (2016)
Zentralverband Elektrotechnikund Elektronikindustrie e. V.: Energieeffizienz mit elektrischen Antrieben (2017)
Zentralverband Elektrotechnik und Elektronikindustrie e. V.: Gleichspannungsnetze in der industriellen Produktion (2017)
Gritzner, D., Knochelmann, E., Greenyer, J., et al.: Specifying and synthesizing energy-efficient production system controllers that exploit braking energy recuperation. IEEE CASE (2018)
VDE DKE: Gleichstrom im Niederspannungsbereich: Deutsche Normungs-Roadmap Version 2 (2018)
Sauer, A. (ed.): Die Gleichstromfabrik: Energieeffizient. Robust. Zukunftsweisend. Hanser, München (2020)
Blank, F., Körner, W., Puls, S.: Die Energieverteilung und Antriebstechnik im Gleichstromnetz: Projekt ‘DC-Industrie’ - Teil 2. https://www.computer-automation.de/feldebene/antriebe/artikel/164614/4/. Accessed 11 May 2022
Savage, P., Nordhaus, R.R., Jamieson, S.P.: DC Microgrids: Benefits and Barriers (2010)
AlLee, G., Tschudi, W.: Edison redux: 380 Vdc brings reliability and efficiency to sustainable data centers. IEEE Power Energy Mag. 10, 50–59 (2012)
Maerz, M., Wunder, B., Ott, L.: LVDC-Netze – Herausforderungen und Perspektiven. In: ETG Conference (2017)
Sanjeev, P., Padhy, N.P., Agarwal, P.: Peak energy management using renewable integrated DC microgrid. IEEE Trans. Smart Grid 9, 4906–4917 (2018)
Olivares, D.E., Mehrizi-Sani, A., Etemadi, A.H., et al.: Trends in microgrid control. IEEE Trans. Smart Grid 5, 1905–1919 (2014)
Weckmann, S., Sauer, A.: DC micro grid for energy efficient and flexible production. Procedia Manuf. 39, 655–664 (2019)
Schaab, D.A., Weckmann, S., Kuhlmann, T., et al.: Simulative analysis of a flexible, robust and sustainable energy supply through industrial smart-DC-grid with distributed grid management. Procedia CIRP 69, 366–370 (2018)
Juschkat, K.: Forschungsnetz testet Gleichstrom (2020). https://www.elektrotechnik.vogel.de/forschungsnetz-testet-gleichstrom-im-einsatz-a-911460/. Accessed 14 May 2022
ZVEI: dc-industrie.zvei.org (2022). https://dc-industrie.zvei.org/. Accessed 11 May 2022
ZVEI: DC-INDUSTRIE2 Vorstellung (2022). https://dc-industrie.zvei.org/publikationen/dc-industrie2-projektvorstellung. Accessed 11 May 2022
PTJ: Verbundvorhaben: DC-Schutzorgane (2022). https://www.enargus.de/pub/bscw.cgi/?op=enargus.eps2&q=DC-Schutzorgane&v=10&s=3&id=602869. Accessed 11 May 2022
Fuchs, J.: SiC4DC (2022). https://www.faps.fau.eu/curforsch/sic4dc-edge-cloud-energy-management-for-dc-powered-automation-systems-with-sic-based-power-electronics/. Accessed 11 May 2022
Retschkowski, M.: Digitale Planung und simulation hybrider AC/DC-Energienetze in automatisierten Produktionsanlagen. M&A News 03, 3–5 (2021)
Kaiser, J., Gosses, K., Ott, L., et al.: Grid behavior under fault situations in ±380 V DC distribution systems. In: 2017 IEEE Second International Conference, pp 139–144 (2017)
Klosinski, C., Ross, P., Hemdan, N., et al.: Modular protection system for fault detection and selective fault clearing in DC microgrids. J. Eng. 2018, 1321–1325 (2018)
ABB: Technical Application Papers No. 14-Faults in LVDC Microgrids (2015)
Hirose, K., Tanaka, T., Babasaki, T., et al.: Grounding concept considerations and recommendations for 400VDC distribution system. In: 2011 IEEE 33rd International Telecommunications, pp. 1–8, 09 October 2011
International Electrotechnical Comission: Rotating electrical machines: Part 1: Rating and performance (60034-1:2022) (2022)
International Electrotechnical Comission: Graphical Symbols for Diagrams part 2-13 (60617-2…13) (1999)
Würfel, A.: PCIM Europe 2016: International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, 10-12 May 2016: Proceedings. VDE, Berlin (2016)
International Electrotechnical Comission: Safety of machinery - Electrical equipment of machines: Part 1: General requirements (60204-1:2016) (2016)
Siemens, A.G.: Technische Schriftenreihe- Ausgabe 16: Transformatorauswahl in Abhängigkeit von Belastungsprofilen (2016)
Siemens, A.G.: Projektierungshandbuch SIMODRIVE 611 digital (2013)
Siemens, A.G.: Simamics S120 Leistungsteile (2019)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Gutwald, B., Ndjiemeni, F.N., Barth, M., Franke, J. (2023). Simulation-Based Efficiency Comparison of Different Mains Configurations for DC Grid Branches for Supplying Production Plants Based on a Rule-Compliant Design. In: Kohl, H., Seliger, G., Dietrich, F. (eds) Manufacturing Driving Circular Economy. GCSM 2022. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-031-28839-5_49
Download citation
DOI: https://doi.org/10.1007/978-3-031-28839-5_49
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-28838-8
Online ISBN: 978-3-031-28839-5
eBook Packages: EngineeringEngineering (R0)