
Abstract
Integrating Industry 4.0 technologies into the circular economy has received much attention in the literature in recent years. Considering the ladder of lansink and circular economy technical cycle, reusing and remanufacturing are preferable to recycling. Disassembly is a crucial process in remanufacturing. Collaborative robots provide semi-autonomous disassembly and could enhance product remanufacturing considering the uncertainties, cost reduction, and circularity of materials. This paper aims to discuss the application of lean practices in a disassembly cell with operators-robots collaboration. A conceptual framework based on the house of lean is proposed to highlight the research perspectives on opportunities of lean philosophy in disassembly operation enabled with industry 4.0 technology.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
In sustainable manufacturing, disassembly operation plays a crucial role in remanufacturing and has considerable economic and environmental benefits in materials circularity. Collaborative robots are promising in disassembly operation considering the costs of manual operations, reducing the ergonomic risks for operators, and high investment in automated disassembly. Disassembly planning includes the optimization of the disassembly sequences for minimizing the disassembly time, consumed energy, and related costs. Lean management has several potentials in sustainability and efficiency of disassembly operation with Cobot. This paper aims to integrate the elements of the Lean management model including wastes reduction, problem-solving, visual management, standardization, operational stability, and quality into a disassembly cell with Cobot. To the best of our knowledge, developing a joint application of lean principles in human-robot collaboration disassembly has not received much attention in the literature. There are two main streams of research in the context of cobot disassembling. The first focused on the safety aspects, designing safety zones, minimization of the collision and the second stream is studying the tasks arrangement and operational mechanisms including sequence planning and performance management. The new stream of research should focus on collaboration rather than coexistence and cooperation. The idea is to handle the complexity and uncertainties of disassembly tasks via effective interaction among different optimization models, digital twin models, AI-based decision-making modules, and the disassembly cell. In this paper, a conceptual framework is proposed to address the implications of lean practices in cobot disassembly cells based on the house of lean. The rest of the paper is organized as follows: Sect. 2 provides the literature review on collaborative robots in disassembly and lean practices in remanufacturing and disassembly. Section 3 explains the conceptual framework and finally, Sect. 4 includes the conclusion and perspective of future research.
2 Literature Review
2.1 Collaborative Robots in Disassembly
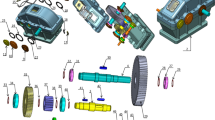
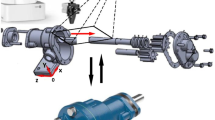
Today, the autonomous remanufacturing laboratory plays an essential role in an Industry 4.0-driven circular economy. Teixeira et al. (2022) performed a literature review on the opportunities for applications of industry 4.0 technologies in remanufacturing. The authors discussed the role of AR/VR, cobots, RFID, and IoT in (1) Guide used product disassembly; (2) Reduce variability in disassembly lead time; (3) Better estimation of product lifetime; (4) Customized diagnosis at the item level; (5) Additional support for the product recovery plan. They explained that AR and VR technologies could provide virtual instruction for end-of-life product evaluation [1]. Cobots provide semi-autonomous disassembly and can enhance the product remanufacturing performance considering the uncertainties and costs reduction. Huang et al. (2019) discussed the essential role of cobots in disassembly of repetitive, heavy and dangerous tasks for operators [2]. The precision and repeatability of the robots can combine with the skills of the operators for safe and efficient operation. Felder et al. (2019) discussed the role of cobot disassembly in critical material recovery. They explained that for the recovery of critical materials, applying cobots can lead to cost-efficiency and create flexibility in working cells. They developed a virtual collaborative robot cell for modeling cobots’ movement for removing screws in the disassembly operations [3]. According to Tolio et al. (2017), there are several challenges for demanufacturing and remanufacturing systems including variant applications of the recovered parts, poor information in return products, increasing the complexity of products, and the uncertainties in the quality of the recovered parts, and more pressures for cost efficiencies [4]. Pham (2020) also discussed that the disassembly operations are stochastic in terms of the shapes and conditions of the used products [5]. The required flexibility manually and laboriously limits the aspect of automation and robotization in the disassembly context. However, there are great benefits of human-robot collaboration for better safety and efficient operation. Hjorth and Chrysostomou (2022) performed a literature review of studies in human-robot collaborative disassembling from 2009 to 2020 [6]. They discussed that fully automated disassembly tasks are mainly focused on consumers electronics considering the limited capacity of existing end-of-life sites for recycling and remanufacturing. However, disassembly of mechatronic and mechanical parts, considering the complexity of disassembly tasks, requires more flexible and customized operations. Hence, more studies focused on cobots applications in this context. According to the authors, future research should focus on collaborative scenarios, more safe interaction among cobots and operators, and effective communications. Huang et al. (2020) discussed the case study of the disassembly of press-fitted components with cobots [7]. They concluded that cobots provide the opportunity for operators to work without the fence and decrease the installation costs, and there is no need to slow down the cobots or stop their work where operators are doing the tasks. Huang et al. (2021, 2019) also presented an experimental work cell for disassembly with cobots. They used two seven axes cobots with a payload of 14 kg for disassembling of an automotive turbocharger [2, 8]. They developed tasks allocation models for minimizing time and costs. However, the ergonomic factors could be integrated into the optimization of productivity as well as safety factors. The authors also mentioned the role of the digital twin in disassembly analysis, sequence planning, and simulation. Liu et al. (2019) developed a discrete bees algorithm for joint optimization of sequence planning and disassembly line balancing [17]. However, the authors assumed that the disassembly time of the parts is known. The uncertainties of disassembling operation could be integrated into these optimization models. Parsa and Saadat (2021) developed an optimization model with a genetic algorithm for the task allocation problem in cobot disassembly considering remanufacturing criteria [18]. The authors considered cleanability, repeatability, and economic conditions for selecting target tasks. Then they used the CAD model for mathematical representation of the target part and considered feasibility, constraints, and precedence in optimization tasks allocation between humans and robots. They used the case study of the fuel pump for showing the effectiveness of the proposed approach. Prioli and Rickli (2020) proposed an architecture and data model for automated disassembly [19]. The proposed UML comprises (1) part data including the geometry information, size, and weight, (2) cobot data includes trajectory, fasteners, and dimension, (3) line model includes the capacity, station, and output, (4) disassembly sequence optimizer as well as (5) disassembling characteristics. Several studies developed optimization models including discrete bees and genetic algorithms for disassembly sequence planning and task allocation. The uncertainties of disassembling operation could be integrated into these optimization models for future research. Considering the uncertainty of the part removal, the disassembly sequence optimization model will be a probabilistic planning model. The uncertainties should be addressed based on the product’s characteristics, operators, cobots’ operational parameters and the interaction between operator and robot.
Hence, the following gaps have existed in the literature of disassembly with cobots:
-
Studying the tasks definition, task sharing, and tasks specific skills in addition to sequence planning
-
Focusing on collaborative operations rather than cooperation and co-existence with cobots
-
Developing the optimization approaches for productivity considering the safety and ergonomic factors under uncertainty.
2.2 Lean Management in Disassembly
A few articles addressed the application of the lean approach to disassembly. Here a brief overview of how lean thinking could be integrated into disassembly processes is provided. Kanikuła and Koch (2009) proposed nine scenarios for integrating lean manufacturing practices into remanufacturing [9]. These main scenarios include using supermarkets for repaired parts, disassembly items, and pull systems. Dayi et al. (2016) discussed the lean principles in the disassembly of aircraft disassembly [10]. They suggested using Value Stream Mapping (VSM) for identifying the wastes and reducing the disassembly time by optimization of displacement in aircraft zones, developing an optimum disassembly sequence and pull system for integrating customers’ demand in real-time.
Kurilova-Palisaitiene et al. (2018) discussed the application of the lean approach including, Kanban, standardized processes, continuous flow, teamwork, and suppliers’ partnership in solving the remanufacturing challenges. They classified these challenges into three categories: process, system, and industry [11]. Hasibul et al. (2018) discussed the lean approach in car dismantling. They used VSM for addressing the improving opportunities of the dismantling process with lean [12]. Among testing, dismantling, cleaning, and inspection, dismantling takes 89% of the total time. It should be noted that 30% of this time is non-value added and wasted. Optimizing the layout and redesigning the work cell could reduce this time by 50%. The authors explained that the task time of disassembly is a variable parameter based on the model of the target part, damage, and the skills level of the operators. Kaizen process is applied to reduce the dismantling time with the training of workers and improving the workspace design. Golinska (2014) discussed the advantages of the lean approach in remanufacturing process [13]. The author concluded that the research in this area is at an early stage comparing the manufacturing process. She assessed the principles of Lean based on the challenges of remanufacturing process. For example, standardization is challenging due to the stochastic nature of the tasks. Pawlik et al. (2021) also developed a conceptual framework for the application of lean practices in remanufacturing [14]. They considered disassembly of returned products, material matching limitation, uncertainty in recovered material, variability in processing time, and stochastic routing as the challenges of remanufacturing. For the lean practices, they focused on standardized work instructions, standardization, Kanban, cross-function workforce, 5S, production analysis board, visual management, cellular manufacturing, and Total Productive Management (TPM). Most of the practices are applicable and can improve the high variable processing time of remanufacturing. Aicha et al. (2022) applied the 5S approach and Kaizen for optimizing the disassembly tasks of a gearbox [15]. Keivanpour (2022) discussed the application of lean management in the circular economy and the context of industry 4.0 [16]. A probabilistic simulation model is proposed to assess the interaction of lean, industry 4.0, and circular economy. Figure 1 summarizes the opportunities of lean practices in operation and the challenges of disassembly operation based on the literature review.
3 Conceptual Framework
The disassembly work cell includes a cobot, specific tools (for example grippers, screwdriver), machines for manual operation, an operator, a toolbox, parts collection boxes, target parts for disassembly, and a workbench. The disassembly cell design and workflow for operators and cobots are important elements in the efficiency of the disassembly operation. The first step of applying the lean philosophy is identifying the problems and root cause analysis.

The opportunities of lean practices in the operation and the challenges of disassembly/remanufacturing

A lean approach to collaborative robot disassembly cell
Figure 2 shows the fishbone diagram of a disassembly cell with a collaborative robot. The root causes are identified in six categories of people, process, equipment, measurement, environment, and management parameters. After identifying the sources of non-efficient operations, a problem-solving approach and process improvement should be applied to optimize the whole process. The conceptual framework for integrating lean philosophy into disassembly cells with cobot is illustrated in Fig. 3. The foundation of house of lean includes the standardization of the operational process and visual management. This standardization for the disassembly tasks assigned to the cobot could reduce the variability of the operator’s tasks. A real-time decision dashboard can be designed for monitoring the process. The advanced simulation provides the mapping of the real-time interaction of robots and the operators to control the process and provide guidance and adjustments. This visual interface includes a 3D model, simulation, and disassembly sequence planning. It provides optimization/prediction, and results will be updated based on physical disassembly process feedback. For all designed experiments, it is essential to use a simulation platform and offline programming for testing and evaluating the operation scenarios outside of the production environment. The two foundations of the house of lean include guaranteeing the quality of the disassembly process and continuous workflow. A robot control program could be adopted to consider automatic stops in the case of operational failures. Another strategy is reducing waste time for changing tools and designing the layout based on 5S principles (Sort, Set in Order, Shine, Standardize, Sustain) for improving the disassembly efficiency. A progress dynamic can be achieved by a problem-solving approach and by enhancing the motivation and spirits of the operators. Assigning heavy and repetitive work to cobots can reduce the safety and ergonomic risks and increase the operator’s productivity by focusing on more challenging manual tasks.

Fishbone diagram for disassembly cell with cobot- Created in Lucidchart, www.lucidchart.com

A preliminary value stream mapping for disassembly of water pump based on the case study provided by Huang et al. [2]-Created in Creatly-www.crealtly.com
VSM is also an effective approach to creating a lean disassembly cell and optimizing the operational tasks. The outcomes will be reducing the disassembly total time, reducing ergonomic risks, and improving the collaboration between cobots, machines ad operators for the continuous flows. Figure 4 shows a VSM for disassembly of an automotive water pump by a collaborative robot based on the information provided in [2].
4 Conclusion
Using collaborative robots in the remanufacturing and disassembly operation could enhance productivity, safety, and ergonomic conditions. This paper provided a brief literature review on the application of cobots in disassembly and the lean management approach in remanufacturing. A root cause analysis based on a fishbone diagram and a conceptual framework based on the house of lean for optimizing the operational tasks in disassembly cells is provided. As discussed, variability and uncertainty of the tasks are the main challenges of remanufacturing and disassembly. Integrating the uncertainty parameters in developing the optimization models for the sequence planning of the disassembly tasks is critical. Future research could focus on integrating the lean approach and optimization models for sequence planning of tasks under uncertainty. The other area for future research is using Ergonomic value stream mapping for optimizing the disassembly operation and improving the material circularity.
References
Teixeira, E.L.S., Tjahjono, B., Beltran, M., Julião, J.: Demystifying the digital transition of remanufacturing: a systematic review of literature. Comput. Ind. 134, 103567 (2022)
Huang, J., et al.: A strategy for human-robot collaboration in taking products apart for remanufacture. Fme Trans. 47(4), 731–738 (2019)
Felder, B.: Programming of Collaborative Robot (Cobot) to Selectively Disassemble Products to Obtain Critical Materials (2019)
Tolio, T., et al.: Design, management and control of demanufacturing and remanufacturing systems. CIRP Ann. 66(2), 585–609 (2017)
Pham, D.: AutoReman—the end of the beginning of robotic disassembly research?
Hjorth, S., Chrysostomou, D.: Human–robot collaboration in industrial environments: a literature review on non-destructive disassembly. Robot. Comput.-Integr. Manufact. 73, 102208 (2022)
Huang, J., et al.: A case study in human–robot collaboration in the disassembly of press-fitted components. Proc. Inst. Mech. Eng. Part B J. Eng. Manufact. 234, 654–664 (2020)
Huang, J., et al.: An experimental human-robot collaborative disassembly cell. Comput. Ind. Eng. 155, 107189 (2021)
Kanikuła, T., Koch, T.: Methodology of designing disassembly and reassembly processes using lean thinking approach. In: Vallespir, B., Alix, T. (eds.) APMS 2009. IAICT, vol. 338, pp. 11–18. Springer, Heidelberg (2010). https://doi.org/10.1007/978-3-642-16358-6_2
Dayi, O., Afsharzadeh, A., Mascle, C.: A Lean based process planning for aircraft disassembly. IFAC-PapersOnLine 49(2), 54–59 (2016)
Kurilova-Palisaitiene, J., Sundin, E., Poksinska, B.: Remanufacturing challenges and possible lean improvements. J. Clean. Prod. 172, 3225–3236 (2018)
Hasibul, I.M., Gustav, B., Malin, T.: Adoption of lean philosophy in car dismantling companies in Sweden-a case study. Procedia Manufact. 25, 620–627 (2018)
Golińska, P.: The lean approach for improvement of the sustainability of a remanufacturing process. LogForum, 10(3) (2014)
Pawlik, E., Ijomah, W., Corney, J., Powell, D.: Exploring the application of lean best practices in remanufacturing: empirical insights into the benefits and barriers. Sustainability 14(1), 149 (2021)
Aicha, M., Belhadj, I., Hammadi, M., Aifaoui, N. : A mathematical formulation for processing time computing in disassembly lines and its optimization. Comput. Ind. Eng. 165, 107933 (2022)
Keivanpour, S.: Lean and industry 4.0 implication in circular design: an operational performance perspective. In: Approaches, Opportunities, and Challenges for Eco-design 4.0, pp. 55–66. Springer, Cham (2022). https://doi.org/10.1007/978-3-030-87371-4_4
Liu, Q., Liu, Z., Xu, W., Tang, Q., Zhou, Z., Pham, D.T.: Human-robot collaboration in disassembly for sustainable manufacturing. Int. J. Prod. Res. 57(12), 4027–4044 (2019)
Parsa, S., Saadat, M.: Human-robot collaboration disassembly planning for end-of-life product disassembly process. Robot. Comput.-Integr. Manufact. 71, 102170 (2021)
Prioli, J.P.J., Rickli, J.L.: Collaborative robot based architecture to train flexible automated disassembly systems for critical materials. Procedia Manufact. 51, 46–53 (2020)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Keivanpour, S. (2023). Integrating Lean Management Principles into Human-Robot Collaboration in Disassembly Cell. In: Kohl, H., Seliger, G., Dietrich, F. (eds) Manufacturing Driving Circular Economy. GCSM 2022. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-031-28839-5_38
Download citation
DOI: https://doi.org/10.1007/978-3-031-28839-5_38
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-28838-8
Online ISBN: 978-3-031-28839-5
eBook Packages: EngineeringEngineering (R0)