
Abstract
The interaction of flow-like landslides with protection barriers is analyzed for their design. Three recent analysis approaches are briefly presented and applied to different landslide geometries. Approach no. 1 (empirical) allows estimating the impact force and flow kinetic energy over the time. Approach no. 2 (analytical) additionally provides the displacement of the barrier due to the impact. Approach no. 3 (numerical) fully simulates the Landslide-Structure-Interaction (LSI) also including the estimate of the amount of landslide volume overtopping the barrier. The required input parameters and the results achievable through the three approaches are illustrated and compared.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
The analysis of the Landslide-Structure-Interaction (LSI) is a difficult yet crucial task, especially in the case of a flow-like landslide impacting a protection barrier.
The first fundamental step is the landslide triggering and propagation analysis in the mountain catchment. This issue was recently reviewed by Cuomo (2020), where the readers can find the details about the engineering analysis methods applicable to detect the potential landslide source areas and the following propagation zones.
In other words, to study the LSI, we need as an input the “reference landslide” (a single landslide or a set of landslides).
The latter must be characterized in terms of velocity, thickness, shape and length. It is worth noting that all those features are extrapolated (using the expert judgement) from the results of the landslide propagation analysis. For instance, soil velocity will be not same all over the landslide body and we will refer to a representative value for the whole landslide just before the LSI starts. The same applies to the landslide thickness and so on.
If the landslide input data are given such as velocity, thickness, unit weight, length, shape and volume, then we can apply one of the empirical methods in the literature to estimate the peak pressure (or force) expected at the impact against the barrier.
Some (hydro-static) methods require only the flow unit weight and thickness (Scotton and Deganutti 1997; Scheild et al. 2013); other (hydro-dynamic) methods use as inputs the flow density and the squared velocity of the flow (Bugnion et al. 2012; Canelli et al. 2012); other (mixed) methods consider both the static and the dynamic components of the flow (Arattano and Franzi 2003; Cui et al. 2015). However, none of them allow assessing the evolution of the impact force over the time.
Recent research tried to overcome these limitations. Di Perna et al. (2022) proposed an enhanced empirical method, first calibrated via numerical analyses and then validated referring to a large dataset of real debris flows. This method allows estimating the impact duration (not only the peak impact pressure), which regulates the deformation of the protection barrier. Cuomo et al. (2022) casted an analytical method to simulate the inelastic collision of the impacting landslide and the protection barrier. From there, the landslide energy release and the deformation plus the eventual displacement of the barrier are determined. Finally, Cuomo et al. (2021a, 2022) applied an advanced numerical code based on Material Point Method (MPM), i.e., the Anura 3D code (and related developments done by Deltares), to entirely reproduce the LSI including the mutual actions between the landslide and the barrier as well as the landslide propagation during the LSI, i.e., the eventual barrier overtopping by some landslide volume.
This paper intends to provide a practical framework to be used in a contest of landslide risk mitigation, consistent with the aims of the Kyoto Landslide Commitment 2020 (Sassa 2021).
2 Methodological Approach
We assume that a flow-like landslide mass impacts against a rigid barrier, fixed or unfixed to the base ground (Fig. 1), as proposed by Cuomo et al. (2020a).

General conceptual scheme for Landslide Structure Interaction (LSI)
The landslide body has unitary width, length \(L_{1}\), depth \(h\), density of the mixture \(\rho_{m}\), initial uniform velocity \(v_{0}\), pore-water pressure \(p_{L}\) and base friction coefficient \(\tan \varphi_{b}\). The barrier has a bottom base \(B\), top base \(b\), height \(H\), inclination of the impacted side \(\beta\).
The LSI develops from the initial configuration (\(t = t_{0}\)), then landslide propagation (\(t_{0} < t < t_{imp}\)) leads to the impact of the landslide front (\(t = t_{{{\text{imp}}}}\)) and to the peak impact force (\(t = T_{1}\)) until the end of the LSI (\(t = t_{f}\)).
Before the landslide reaches the barrier (\(t_{0} < t < t_{{{\text{imp}}}}\)), i.e., during the propagation stage, the LSI problem is governed by the basal frictional force F1, which acts along the bottom of the flow (\(L_{1}\)) and controls the reduction in flow velocity, resulting in a decrease of the impact force.
Once the flow starts to interact with the barrier \({(}t_{{{\text{imp}}}} < t < T_{{2}} {)}\), additional stresses (mostly orthogonal to the impacted surface, hence horizontal in many applications) are produced on the impacted side of the barrier. Many studies (e.g., Cui et al. 2015; Song et al. 2017) demonstrated that the impact force–time history can be simplified as a triangular force impulse, usually with a rise time (\(t = T_{1}\)) much shorter than the decay time (\(T_{2} - T_{1}\)).
For the action-reaction principle, the mutual impact forces between the landslide and the barrier are equal and opposite. Such mutual stress causes: (i) the flow to decelerate and (ii) the barrier to slip along the base, if unfixed. The evaluation of the impact forces applied on the inclined side of the barrier (\(L_{2}\)) is fundamental to design the structural characteristics of the barrier.
It is also worth noting that the flow may overtop the barrier during the impact, generating an additional force F3 on the structure, mainly dependent on the flow-barrier frictional contact (\(\tan \delta\)).
After the impulsive stage of the LSI (\(T_{2} < t < t_{f}\)), the problem is mostly governed by the inertial resistance force F4, which depends on the amount of friction mobilized along the base (\(b\)) of the barrier (\(\tan \delta_{b}\)). The displacement \(\Delta x\) of the barrier at the end of LSI (\(\Delta x_{f}\)) depends on both the amount of energy transferred to the barrier and that dissipated by shear friction along the base.
3 Alternatives for Design
3.1 Design Approach No. 1: Empirical
In a simplified approach, the barrier is assumed as fixed to the base ground and high enough to retain all the landslide volume behind the barrier (Fig. 2).

Scheme in the empirical method
The landslide is schematized as rectangular with mass \(m_{1}\), length \(L_{1}\), depth \(h\), unitary width, density \(\rho_{m}\), initial velocity \(v_{0}\) and it is supposed that the landslide is completely stopped by the barrier (i.e., \(v\left( {T_{2} } \right) = 0\)).
Once the Froude number (Eq. 1) is computed, as representative of the landslide kinematics, we compute the coefficient \(\alpha\) from Eq. 2. Then, based on previous studies (Hungr et al. 1984; Scotton and Deganutti 1997; Kwan 2012), the peak lateral force \(F_{{{\text{peak}}}}\) (Eq. 3) exerted by the flow on the barrier is calculated by the sum of a dynamic component \(F_{{\text{peak,dyn}}}\) (Fig. 2a) and a height-dependent static component \(F_{{\text{peak,stat}}}\) (Fig. 2b), as in Eqs. (4–5).
The impact period \(T_{2}\) is obtained by using the impulse theorem, since the integral over time of the impact force (i.e., the impact impulse) is equal to the variation of linear momentum of the landslide (Eq. 6). The landslide mass is supposed to be constant during the impact. Once \(T_{2}\) is known through Eq. 6, for timp = 0, \(T_{1}\) can be achieved in Eq. 7, by fixing the ratio \(\tau = {{T_{1} } \mathord{\left/ {\vphantom {{T_{1} } {T_{2} }}} \right. \kern-\nulldelimiterspace} {T_{2} }}\) (for example from experimental evidence). The description of the impact dynamics is now complete. In fact, the reduction in landslide velocity ∆v(t) is obtained from Eq. 8, and the flow velocity over time v(t) from Eq. 9. The corresponding kinetic energy Ek,1(t) (Eq. 10) can be computed.
All the details of this approach are reported in Di Perna et al. (2022), and a suggested set of model parameters are: \(a_{1}\) = 1.781, \(a_{2}\) = − 0.515, \(\tau\) = 0.14, \(\kappa\) = 0. The main advantage of this method is the simple applicability and the reduced number of parameters. The main limitation is the inability to give information about the dynamics of the barrier if the latter is left free to shift along its base. In some cases, in fact, it could be convenient to introduce an additional energy dissipation mechanism related to the barrier movement and deformation.
3.2 Design Approach No. 2: Analytical
A more elaborated analytical model is set up where the landslide and the barrier are considered as two colliding bodies. The approaching flow has a volume \(V_{1}\), mass \(m_{1}\), length \(L_{1,0}\), depth \(h\), unitary width, density \(\rho_{m}\), and initial velocity \(v_{1,0}\).
The barrier is rigid, with its own mass \(m_{2}\) and it is free to slide along the base. The frictional contact at the base is equal to \(\tan \left( {\delta_{b} } \right)\), which can be set as the 80% of the strength properties of the subsoil base material (Cuomo et al. 2020a). As a special case, a barrier fixed to the base ground can be also considered, by setting the mass of the barrier to a very high value compared to that of the flow (i.e., \(m_{2} /m_{1} \to \infty\)).
The landslide-barrier interaction (impact stage in Fig. 3a) is schematized by an inelastic collision. After the impact, the two bodies reach the same velocity \(v_{CM}\), applied in the centre of mass (CM) of the system.

Conceptualization in the analytical method: a during impact, b after impact
The impact force \(F\) is a spatio-temporal function since the approaching volume of the landslide increases with time until \(T_{1}\) and then diminishes due to the dissipation of flow energy. The quantity \(s_{1}\) represents the change (shortening) of the landslide body after the impact and it is computed as positive in the direction opposite to the flow movement. Since the impacting mass is saturated, the expected behaviour is that a part of the landslide mass will overtop the barrier and the remaining volume will interact with the barrier.
The mathematical steps are reported in Cuomo et al. (2022), while the main equations are written below. The maximum value \(s_{{1,{\text{max}}}}\) is reached when the impact force is equal to the peak value. This means that only a part of the total volume of the landslide contributes to the interaction with the barrier. This concept is relevant. The quantity \(K_{1} = \left( {\frac{{m_{1} m_{2} }}{{m_{1} + m_{2} }}} \right) \cdot \left( {\frac{{v_{1,0} }}{{s_{{1,{\text{max}}}} }}} \right)\) is a model parameter referred to the body 1 (landslide), while the quantities \(q_{1}\) (Eq. 11) and \(T_{2}\) (Eq. 12) are the primary model unknowns. For timp = 0, once both \(T_{2}\) and \(T_{1}\) (Eq. 7) are known, which can be achieved by fixing the ratio \(\tau = T_{1}\)/\(T_{2}\) (e.g., from experimental evidence), the impact dynamics description is complete.
The kinematics of the landslide during the impact is described by the velocity of its centre of mass v1(t) (Eq. 15) and kinetic energy Ek,1(t) (Eq. 16).
Similar equations are derived for body 2 (i.e., the barrier). Here, the frictional contact along the base of the barrier causes its deceleration and therefore, it must be considered in the velocity formulation. The deceleration is equal to the ratio between the frictional contact force and the mass of the barrier and remains constant during the interaction with the flow. It implies that the velocity v2(t), displacement ∆x(t) and kinetic energy Ek,1(t) of the barrier can be approximately computed (if landslide shear stresses along the impacted side of the barrier are neglected) as:
After the impact, the landslide-structure-interaction between the two bodies can be neglected since the motion is mostly governed by shear friction along the base. In this stage, the change in velocity over time can be calculated referring to the uniformly decelerating motion equations. The final displacement \(\Delta x_{f}\) of the barrier is reported in Eq. (20).
In this analytical model, two quantities \(s_{{\text{1,max}}}\) and \(\tau\) must be evaluated. From numerical calibrations performed by Cuomo et al. (2022) for a set of cases, it emerges that the ratio \(\lambda = {{s_{{\text{1,max}}} } \mathord{\left/ {\vphantom {{s_{{\text{1,max}}} } {L_{{1,0}} }}} \right. \kern-\nulldelimiterspace} {L_{{1,0}} }}\) was equal to 0.72 for barriers fixed to the base ground and 0.41 for unfixed barriers. Suggested values for \(\tau\) are 0.17 (fixed) and 0.25 (unfixed).
The proposed analytical model reproduces the global behaviour of the landslide body in the LSI process and implicitly disregards some local mechanisms, such as the formation (behind the barrier) of a dead zone, over which the rear part of the landslide body propagates (Ng et al. 2018). This is one of the limitations of the model.
3.3 Design Approach No. 3: Numerical
Among the many numerical techniques applicable to the complex problem of LSI, the Material Point Method is a particularly suitable tool. In fact, MPM is an appropriate modelling alternative for large deformation problems.
The Lagrangian points (named Material Points) are free to move across a fixed mesh (an example is shown in Fig. 4), which schematizes the domain where the materials are at the start and where they will move during the deformation process. At each time step, the governing equations are solved on the mesh, but then all the stress–strain variables are saved in the MPs.

Example of geometrical schematization in MPM
To schematize the LSI problem in a more realistic way than in the previous methods, the build-up of pore water pressure in the flow material during the impact is considered as well as the hydro-mechanical coupled behaviour and the yielding of the flow material.
For a saturated porous material, each MP reproduces a volume of the mixture \(V\), given by the sum of the solid \({\text{V}}_{S}\) and liquid \({\text{V}}_{L}\) phases volumes. Each MP stores the information about both the solid and liquid phases. This is called two-phase single-point formulation (Jassim et al. 2013; Ceccato et al. 2018). The primary unknowns are the solid (\({\mathbf{a}}_{S}\)) and the liquid acceleration (\({\mathbf{a}}_{L}\)). From there, the velocities of the solid and liquid phases are obtained. The MPs are moved with the kinematics of the solid skeleton during the computation. Instead, the so-called “one-phase single-point” formulation can be opportunely adopted for dry materials, that is the case of the rigid barrier.
The governing equations are the conservation of mass (Eq. (21), with ρ being the density), automatically satisfied as the solid mass is constant in each MP during deformation, the conservation of linear momentum (Eq. 22), and the stress (\({{\varvec{\upsigma}}}\))–strain (ε) dependency (Eq. (23)). The latter is simulated through the Jaumann stress rate (\(\dot{\user2{\sigma }}\)) that can handle large deformations, unlike the Cauchy tensor for small strain rates.
The time integration scheme is explicit, since most of the dynamic problems, including wave or shock propagation, cannot be treated properly by an implicit integration which tends to smooth the solution (Fern et al. 2019). Hence, there is a critical time step \({ }\Delta t_{cr}\) during which a wave with speed c crosses the smallest element length d (Eq. 24 with E being the soil stiffness). The critical time step defines the biggest time increment which can be used for a stable calculation, but often it cannot be estimated in the case of non-linear problems. For this reason, the critical time step is multiplied by an additional factor \(C_{NB}\) (namely Courant number) to reach stability. The Courant number has values between 0 and 1. Generally, the smaller the Courant number and the smaller the time step, improving the accuracy of the numerical results.
The interaction force between solid and liquid phases is governed by Darcy’s law. Numerically, these equations are solved at grid nodes considering the Galerkin method (Luo et al. 2008) with standard nodal shape functions and their solutions are used to update MPs velocities and momentum of each phase. The strain rate \(\dot{\user2{\varepsilon }}\) of the MPs is computed from the nodal velocities obtained from the nodal momentum.
In the two-phase single-point formulation the liquid mass, and consequently the mass of the mixture, is not constant in each material point but can vary depending on porosity changes. Fluxes due to spatial variations of the liquid mass are neglected and Darcy’s law is used to model solid–liquid interaction forces. For this reason, this formulation is generally used in problems with small gradients of porosity, and laminar and stationary flow in slow velocity regime. However, this formulation proves to be suitable for studying flow-structure-interaction (Cuomo et al. 2021a). The water is assumed to be linearly compressible via the bulk modulus of the fluid \({\mathbf{K}}_{L}\) and shear stresses in the liquid phase are neglected.
With reference to the critical time step, the influence of permeability and liquid bulk modulus must be considered as well (Mieremet et al. 2016). In particular, the time step required for numerical stability is smaller in soil with lower permeability (Eq. 25).
The sliding model of the flowing mass on the rigid material is handled by a frictional Mohr–Coulomb strength criterion. The contact formulation is used to ensure that no interpenetration occurs, and that the tangential forces are compatible with the shear strength along the contact. The reaction force acting on the structure at node j is calculated as in Eq. 26.
The terms \(\Delta a_{{S,{\text{contact}}}}\) and \({ }\Delta a_{{L,{\text{contact}}}}\) are the change in acceleration induced by the contact formulation, for both solid and liquid phase, and \(m_{i,S}\) and \(m_{i,L}\) are the corresponding nodal masses, respectively. The total reaction force is the integral of the nodal reaction forces along the barrier. Details of the contact formulation are described in Martinelli and Galavi (2022).
4 Design Examples
4.1 Landslide and Barrier Schemes
The initial landslide configuration is meant to represent the shape of the flow at a certain time during propagation (Fig. 5), but it strongly depends on the site-specific flow-path topography and geomorphological conditions.

Geometric schematization for the LSI numerical simulations with a rigid barrier
However, shear friction along the ground topography often results in a stronger, higher front, a weaker, lower body and a tail of the flow mixture (Iverson 1997; Pudasaini and Fischer 2020; Thouret et al. 2020).
Here, we consider a 45°—inclined front and a tail of length equal to three times the flow height. For varying the flow volumes, \(i\) number of squares are placed between the head and tail portions.
Given this shape, the landslide has the same volume of an equivalent paralepidid with the same height \(h\), unitary width and a length \(L_{m} = \left( {2 + i} \right) \cdot h\) (Fig. 2).
The landslide is assumed to approach the barrier with a fixed geometric configuration and constant velocity, until the LSI starts. For the sake of simplicity, the flow basal frictional force \(F_{1}\) (Fig. 1) is assumed equal to zero in all the cases, by means of a smooth contact. Although simplified, the landslide scheme resembles its main characteristics such as velocity, impact height, non-zero interstitial pressures and elasto-plastic behavior. The distribution of pore water pressure is simplified as hydrostatic along the vertical at the beginning of LSI. Then, pore water pressures change because of LSI.
The mechanical parameters of the landslide material are: ρm (density of the mixture) = 1800 kg/m3; n (porosity) = 0.5; φ′ (effective friction angle) = 20°; c′ (effective cohesion) = 0; E′ (Young modulus) = 2 MPa; ν (Poisson’s ratio) = 0.25; k (hydraulic conductivity) = 10−4 m/s; μL (liquid viscosity) = 10−6 kPa s; and KL (liquid bulk modulus) = 30 MPa. These properties are used as inputs in the MPM model, whereas for the analytical and empirical approaches only the density of the mixture is considered.
Some landslide typologies (impact scenarios) are chosen as examples for the design of the protection structure. Table 1 reports the geometric features, the different values of v1,0 and h, and even some of the related quantities V1, m1 and Ek1,0. In the engineering practice, all these quantities are accurately estimated through specific analyses of landslide triggering and propagation (Cuomo et al. 2019, 2021b).
For the barrier it is assumed: non-porous material, base fixed to the ground (empirical approach) or free to sliding (analytical and numerical approaches) with rigid behaviour. This last hypothesis relates to the construction mode typically used for such barriers (Cuomo et al. 2020a, b).
Table 2 outlines the features of some barrier options considered in the following sections to apply the three methods for LSI analysis.
4.2 The (Empirical) Method No. 1: Results
The time trend of the impact force F(t) is computed for the landslide cases L1, L2 and L3 reported in Table 1 and assuming a different steepness (β) of the impacted side of the barrier. In this novel, yet simplified method, (Di Perna et al. 2022), the impact action is mainly related to the landslide features. Indeed, the effect of the steepness (β) of the impacted side of the barrier is also considered, with the “reference velocity” for the impact computed as the component of landslide velocity orthogonal to the barrier facing.
It is evident that the landslide case L3 causes the highest peak impact force (Fig. 6a) due to the largest initial landslide kinetic energy (Fig. 6b). However, this is also the case with the shortest duration due to the most rapid release of kinetic energy Ek(t). For L3, a differently steeped barrier facing also plays a role toward the impact force reducing from 1000 kN/m (β = 80°) to 700 kN/m (β = 60°).

Empirical model results: a time trend of the impact force; b kinetic energy of the landslide over the time
Once the plot of Fig. 6a has been computed, then the design of the barrier can be pursued.
A first step is to preliminarily individuate the geometry features (Fig. 1) of the barrier, i.e., the top base (b), the bottom base (B) and the height (H).
Then, the barrier safety analyses for shifting and tilting can be performed based on a simple dynamic model of a rigid block with a base frictional contact (e.g., Newmark model). Alternatively, a complete stress–strain analysis can be performed via Finite Element Method (see for instance, Cuomo et al. 2020a) or Finite Difference Method (refer to Cuomo et al. 2020b), thus individuating any Ultimate Limit State (ULS) of the barrier (i.e., shifting, global/local deformation, combination of the previous ULSs).
4.3 The (Analytical) Method No. 2: Results
The temporal evolution of the impact force (F) and landslide kinetic energy (Ek) are computed for landslide cases L1, L2 and L3 of Table1 and for the three barriers of Table 2. Comparing the results of Fig. 7 (analytical) to those in Fig. 6 (empirical method) is useful.

Analytical model results: a time trend of the impact force; b kinetic energy of the flow over time
The empirical method provides an overestimation of the impact forces obtained by the analytical method, especially for the landslides with large kinetic energy. The latter decays more rapidly according to the empirical method than for the analytical one. Hence, the analytical method provides similar or lower impact force with a similar or longer time for the landslide energy decay. These differences were expected because the effects of the landslide-structure interaction are included in the analytical method, but not in the empirical method.
In addition to this assessment, the displacement (\(\Delta x_{f}\)) of the barrier is computed over time during the LSI. The final displacements of the selected cases are reported in Table 3. It is worth noting that in the scenario no. 8, the displacement is about nil, while in the other cases, the barrier is displaced of few meters during the landslide impact. However, such performance is insufficient in some circumstances.
In fact, if the site-specific field conditions ensure limited space for the barrier or in presence of buildings just behind the barrier, then a requirement for the barrier is to allow low/moderate displacement during the LSI.
In those cases, an inverse use of the analytical method is suggested. Hence, given the landslide features (e.g., Table 4), once the steepness of the impacted side (depending on the construction mode and materials used), and the maximum tolerable barrier displacement (e.g., 0.5 m in Table 4) is established, then the minimum required mass (m2) for the barrier can be computed. From that value, different design options correspond to different sets of H, B and b. In this design procedure, the barrier is assumed to be rigid, which is generally a safe assumption. Once the impact action and geometry of the barrier is known, then barrier safety analyses can be done as for method no. 2.
4.4 The (Numerical) Method No. 3: Results
What is the main limitation of the previous approaches? It is that any possible landslide overtopping cannot be assessed. The latter is not a secondary LSI mechanism in the case of flow-like landslides. Moreover, the barrier was not considered as deformable. Both these limitations are overcome by the MPM numerical method. Here, the barrier is still considered as rigid to better compare the results of the three approaches.
Some landslide and barrier cases are considered in Fig. 8, which shows the peak forces are similar (Fig. 8a) to those achieved by the analytical method. Such general agreement among those results is encouraging. This is also reflected by the similar barrier displacements computed analytically (Table 3) or numerically (Table 5). However, a slightly slower decay of F(t) and a slower energy release (Fig. 8b) are simulated with respect to the analytical trends. In addition, in the cases no. 5 (L1–B2) and 4 (L1–B3) the analytical and numerical results differ much more. This means that a combined use of multiple methods is always recommended.

MPM numerical results: a time trend of the impact force; b kinetic energy of the flow over time
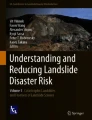
The spatio-temporal distribution of the soil velocity and deviatoric (shear) deformation inside the landslide body is plotted in Fig. 9. The above-mentioned complexity of the LSI is outlined and it is clearly shown that velocity and deformation are not uniform in the landslide body during the LSI, because the barrier is displaced away.

Velocity during the impact for L1-B2 (a) and L1–B3 (b), Deviatoric strain for L1-B2 (c) and L1-B3 (d)
Further insights come from the results shown in Figs. 10 and 11. Soil deformations are relevant in the proximity of the impacted barrier side, pointing out the marginal role of the tail during the impact.

Velocity distribution during the impact for L1–B1 (a), L2–B1 (b), L3–B1 (c)

Deviatoric strain distribution during the impact for L1–B1 (a), L2–B1 (b), L3–B1 (c)
5 Comparison and Discussion
For the nine examples proposed in Table 6, a substantial agreement of at least two out of the three methods is shown for the peak impact force and for the impact duration (Table 6 and Fig. 12). This is important for design purposes.

Comparing the proposed approaches for peak impact force, impact period and barrier final displacement
For the final displacement of the barrier, the empirical method alone does not give information, while the other two methods are in many cases in very good agreement. However, some discrepancies are also possible (e.g., cases 3, 4 and 5) when LSI is very complex.
The numerical method considers the elasto-plastic soil behavior and the hydro-mechanical coupling between the solid skeleton and soil porosity water. These features are not present in the two other methods. It is worth noting that the increment of pore water pressure at the impact is recognized as an important factor of LSI (Cuomo et al. 2021a). That increment in pore water pressure is also the possible overtopping mechanism and the final amount of landslide retained behind the barrier.
6 Conclusions
A general conceptual scheme and three different methods have been presented in this paper for the analysis of LSI (Landslide-Structure Interaction).
The results of the distinct methods are generally in good agreement, because they are all adequate to reproduce the physical processes of the LSI. Hence, different tools and options to design a protection barrier have been provided. The combined use of multiple methods is fully encouraged.
References
Arattano M, Franzi LJNH (2003) On the evaluation of debris flows dynamics by means of mathematical models. Nat Hazard 3(6):539–544
Bugnion L, McArdell BW, Bartelt P, Wendeler C (2012) Measurements of hillslope debris flow impact pressure on obstacles. Landslides 9(2):179–187
Canelli L, Ferrero AM, Migliazza M, Segalini A (2012) Debris flow risk mitigation by the means of rigid and flexible barriers–experimental tests and impact analysis. Nat Hazard 12(5):1693–1699
Ceccato F, Yerro A, Martinelli M (2018) Modelling soil-water interaction with the material point method. Evaluation of single-point and double-point formulation. In: Numerical methods in geotechnical engineering IX, pp 351–357
Cui P, Zeng C, Lei Y (2015) Experimental analysis on the impact force of viscous debris flow. Earth Surf Process Land 40(12):1644–1655
Cuomo S, Moretti S, Aversa S (2019) Effects of artificial barriers on the propagation of debris avalanches. Landslides 16(6):1077–1087
Cuomo S (2020) Modelling of flowslides and debris avalanches in natural and engineered slopes: a review. Geoenviron Disasters 7(1):1–25
Cuomo S, Moretti S, D’Amico A, Frigo L, Aversa S (2020a) Modelling of geosynthetic-reinforced barriers under dynamic impact of debris avalanche. Geosynth Int 27(1):65–78
Cuomo S, Moretti S, Frigo L, Aversa S (2020b) Deformation mechanisms of deformable geosynthetics-reinforced barriers (DGRB) impacted by debris avalanches. Bull Eng Geol Env 79(2):659–672
Cuomo S, Di Perna A, Martinelli M (2021a) MPM hydro-mechanical modelling of flows impacting rigid walls. Can Geotech J 58(11):1730–1743
Cuomo S, Masi EB, Tofani V, Moscariello M, Rossi G, Matano F (2021b) Multiseasonal probabilistic slope stability analysis of a large area of unsaturated pyroclastic soils. Landslides 18(4):1259–1274
Cuomo S, Di Perna A, Martinelli M (2022) Analytical and numerical models of debris flow impact. Eng Geol (under review)
Di Perna A, Cuomo S, Martinelli M (2022) Empirical formulation for debris flow impact and energy release. Geoenviron Disaster (under review)
Fern E, Rohe A, Soga K, Alonso E (2019) The material point method for geotechnical engineering: a practical guide. CRC Press
Hungr O, Morgan GC, Kellerhals R (1984) Quantitative analysis of debris torrent hazards for design of remedial measures. Can Geotech J 21(4):663–677
Iverson RM (1997) The physics of debris flows. Rev Geophys 35(3):245–296
Jassim I, Stolle D, Vermeer P (2013) Two-phase dynamic analysis by material point method. Int J Numer Anal Meth Geomech 37(15):2502–2522
Kwan JSH (2012) Supplementary technical guidance on design of rigid debris-resisting barriers. GEO report no. 270, Geotechnical Engineering Office, Civil Engineering and Development Department, Hong Kong SAR Government
Luo H, Baum JD, Löhner R (2008) A discontinuous Galerkin method based on a Taylor basis for the compressible flows on arbitrary grids. J Comput Phys 227(20):8875–8893
Martinelli M, Galavi V (2022) An explicit coupled MPM formulation to simulate penetration problems in soils using quadrilateral elements. Comput Geotech. https://doi.org/10.1016/j.compgeo.2022.104697
Mieremet MMJ, Stolle DF, Ceccato F, Vuik C (2016) Numerical stability for modelling of dynamic two-phase interaction. Int J Numer Anal Meth Geomech 40(9):1284–1294
Ng CWW, Choi CE, Koo R, Goodwin GR, Song D, Kwan JS (2018) Dry granular flow interaction with dual-barrier systems. Géotech 68(5):386–399
Pudasaini SP, Fischer JT (2020) A mechanical model for phase separation in debris flow. Int J Multiph Flow 129:103292
Sassa K (2021) The Kyoto landslide commitment 2020: launched. Landslides 18(1):5–20
Scheidl C, Chiari M, Kaitna R, Müllegger M, Krawtschuk A, Zimmermann T, Proske D (2013) Analysing debris-flow impact models, based on a small scale modelling approach. Surv Geophys 34(1):121–140
Scotton P, Deganutti AM (1997) Phreatic line and dynamic impact in laboratory debris flow experiments. In: Debris-flow hazards mitigation: mechanics, prediction, and assessment. ASCE, pp 777–786
Song D, Ng CWW, Choi CE, Zhou GG, Kwan JS, Koo RCH (2017) Influence of debris flow solid fraction on rigid barrier impact. Can Geotech J 54(10):1421–1434
Thouret JC, Antoine S, Magill C, Ollier C (2020) Lahars and debris flows: characteristics and impacts. Earth Sci Rev 201:103003
Acknowledgements
The research was developed within the framework of Industrial Partnership PhD Course (POR Campania FSE 2014/2020). All the MPM simulations were performed using a version of the Anura3D code developed by Deltares.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this chapter

Cite this chapter
Cuomo, S., Di Perna, A., Martinelli, M. (2023). Design Protection Barriers Against Flow-Like Landslides. In: Sassa, K., Konagai, K., Tiwari, B., Arbanas, Ž., Sassa, S. (eds) Progress in Landslide Research and Technology, Volume 1 Issue 1, 2022. Progress in Landslide Research and Technology. Springer, Cham. https://doi.org/10.1007/978-3-031-16898-7_8
Download citation
DOI: https://doi.org/10.1007/978-3-031-16898-7_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-16897-0
Online ISBN: 978-3-031-16898-7
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)