
Abstract
When data are not normally distributed, researchers are often uncertain whether it is legitimate to use tests that assume Gaussian errors, or whether one has to either model a more specific error structure or use randomization techniques. Here we use Monte Carlo simulations to explore the pros and cons of fitting Gaussian models to non-normal data in terms of risk of type I error, power and utility for parameter estimation. We find that Gaussian models are robust to non-normality over a wide range of conditions, meaning that p values remain fairly reliable except for data with influential outliers judged at strict alpha levels. Gaussian models also performed well in terms of power across all simulated scenarios. Parameter estimates were mostly unbiased and precise except if sample sizes were small or the distribution of the predictor was highly skewed. Transformation of data before analysis is often advisable and visual inspection for outliers and heteroscedasticity is important for assessment. In strong contrast, some non-Gaussian models and randomization techniques bear a range of risks that are often insufficiently known. High rates of false-positive conclusions can arise for instance when overdispersion in count data is not controlled appropriately or when randomization procedures ignore existing non-independencies in the data. Hence, newly developed statistical methods not only bring new opportunities, but they can also pose new threats to reliability. We argue that violating the normality assumption bears risks that are limited and manageable, while several more sophisticated approaches are relatively error prone and particularly difficult to check during peer review. Scientists and reviewers who are not fully aware of the risks might benefit from preferentially trusting Gaussian mixed models in which random effects account for non-independencies in the data.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
In the biological, medical, and social sciences, the validity or importance of research findings is generally assessed via statistical significance tests. Significance tests ensure the trustworthiness of scientific results and should reduce the amount of random noise entering the scientific literature. Brunner and Austin (2009) even regard this as the “primary function of statistical hypothesis testing in the discourse of science”. However, the validity of parametric significance tests may depend on whether model assumptions are violated (Gelman & Hill, 2007; Zuur et al., 2009). In a growing body of literature, researchers express their concerns about irreproducible results (Camerer et al., 2018; Ebersole et al., 2016; Open Science Collaboration, 2015; Silberzahn et al., 2018) and it has been argued that the inappropriate use of statistics is a leading cause of irreproducible results (Forstmeier et al., 2017). Yet researchers may often be uncertain about which statistical practices enable them to answer their scientific questions effectively and which might be regarded as error prone.
One of the most widely known assumptions of parametric statistics is the assumption that errors (model residuals) are normally distributed (Lumley et al., 2002). This “normality assumption” underlies the most commonly used tests for statistical significance, that is linear models “lm” and linear mixed models “lmm” with Gaussian error, which includes the often more widely known techniques of regression, t test and ANOVA. However, empirical data often deviates considerably from normality, and may even be categorical such as binomial or count data. Recent advances in statistical modeling appear to have solved this problem, because it is now possible to fit generalized linear mixed models “glmm” with a variety of error distributions (e.g., binomial, Poisson, zero-inflated Poisson, negative binomial; Harrison et al., 2018; O'Hara, 2009) or to use a range of randomization techniques such as bootstrapping (Good, 2005) in order to obtain p values and confidence intervals for parameter estimates from data that does not comply with any of those distributions.
While these developments have supplied experts in statistical modeling with a rich and flexible toolbox, we here argue that these new tools also have created substantial damage, because they come with a range of pitfalls that are often not sufficiently understood by a large majority of scientists who are not outspoken experts in statistics, but who nevertheless implement the tools in good faith. The diversity of possible mistakes is so large and sometimes specific to certain software applications that we only want to provide some examples that we have repeatedly come across (see Box 1). Our examples include failure to account for overdispersion in glmms with Poisson errors (Forstmeier et al., 2017; Harrison, 2014; Ives, 2015), inadequate resampling in bootstrapping techniques (e.g., Ihle et al., 2019; Santema et al., 2019), as well as problems with pseudoreplication due to issues with model convergence (Arnqvist, 2020; Barr et al., 2013; Forstmeier et al., 2017). These issues may lead to anticonservative p values and hence a high risk of false-positive claims.
Considering these difficulties, we here want to argue whether it may often be “the lesser of two evils” when researchers fit conventional Gaussian (mixed) models to non-normal data, because, as we will show, Gaussian models are remarkably robust to non-normality, ensuring that type I errors (false-positive conclusion) are kept at the desired low rate. Hence, we argue that for the key purpose of limiting type I errors it may often be fully legitimate to model binomial or count data in Gaussian models, and we also would like to raise awareness of some of the pitfalls inherent to non-Gaussian models.
Box 1 Examples of specialized techniques that may result in a high rate of false-positive findings due to unrecognized problems of pseudoreplication (A) Many researchers, being concerned about fitting an “inappropriate” Gaussian model, hold the believe that binomial data always requires modelling a binomial error structure, and that count data mandates modeling a Poisson-like process. Yet, what they consider to be “more appropriate for the data at hand” may often fail to acknowledge the non-independence of events in count data (Forstmeier et al., 2017; Harrison, 2014, 2015; Ives, 2015). For instance, in a study of butterflies choosing between two species of host plants for egg laying, an individual butterfly may first sit down on species A and deposit a clutch of 50 eggs, followed by a second landing on species B where another 50 eggs are laid. If we characterize the host preference for species A of this individual by the total number of eggs deposited (p(A) = 0.5, N = 100) we obtain a highly anticonservative estimate of uncertainty (95% CI for p(A): 0.398–0.602), while if we base our preference estimate on the number of landings (p(A) = 0.5, N = 2) we obtain a much more appropriate confidence interval (95% CI for p(A): 0.013–0.987). Even some methodological “how-to” guides (e.g., Fordyce et al., 2011; Harrison et al., 2018; Ramsey & Schafer, 2013) forgot to clearly explain that it is absolutely essential to model the non-independence of events via random effects or overdispersion parameters (Harrison, 2014, 2015; Ives, 2015; Zuur et al., 2009). Unfortunately, non-Gaussian models with multiple random effects often fail to reach model convergence (e.g., Brooks et al., 2017), which often lets researchers settle for a model that ignores non-independence and yields estimates with inappropriately high confidence and statistical significance (Arnqvist, 2020; Barr et al., 2013; Forstmeier et al., 2017) (B) When observational data do not comply with any distributional assumption, randomization techniques like bootstrapping seem to offer an ideal solution for working out the rate at which a certain estimate arises by chance alone (Good, 2005). However, such resampling can also be risky in terms of producing false-positive findings if the data is structured (temporal autocorrelation, random effects; e.g., Ihle et al., 2019) and if this structure is not accounted for in the resampling regime (blockwise bootstrap; e.g., Önöz & Bayazit, 2012). Specifically, there is the risk that non-independence introduces a strong pattern in the observed data, but, in the simulated data, comparably strong patterns do not emerge because the confounding non-independencies were broken up (Ihle et al., 2019). We argue that pseudoreplication is a well-known problem that has been solved reasonably well within the framework of mixed models, and the consideration or neglect of essential random effects can be readily judged from tables that present the model output. In contrast, the issue of pseudoreplication is more easily overlooked in studies that implement randomization tests, where the credibility of findings hinges on details of the resampling procedure that are not understood by the majority of readers. One possible way of validating a randomization procedure, may be to repeat an experiment several times, and to combine all the obtained effect estimates with their SEs in a formal meta-analysis. If the meta-analysis indicates that there is substantial heterogeneity in effect sizes (I2 > 0), then the SEs obtained from randomizations were apparently too small (anticonservative), hence not allowing to draw general conclusions that would also hold up in independent repetitions of the experiment. Unfortunately, such validations on real data are not so often carried out when a new randomization approach is being introduced, and this shortcoming may imply that numerous empirical studies publish significant findings (due to a high type I error rate) before the methodological glitch gets discovered. |
A wide range of opinions about violating the normality assumption
Throughout the scientific literature, linear models are typically said to be robust to the violation of the normality assumption when it comes to hypothesis testing and parameter estimation as long as outliers are handled properly (Ali & Sharma, 1996; Box & Watson, 1962; Gelman & Hill, 2007; Lumley et al., 2002; Miller, 1986; Puth et al., 2014; Ramsey & Schafer, 2013; Schielzeth et al., 2020; Warton et al., 2016; Williams et al., 2013; Zuur et al., 2010), yet authors seem to differ notably in their opinion on how serious we should take the issue of non-normality.
At one end of the spectrum, Gelman and Hill (2007) write “The regression assumption that is generally least important is that the errors are normally distributed” and “Thus, in contrast to many regression textbooks, we do not recommend diagnostics of the normality of regression residuals” (p. 46). At the other end of the spectrum, Osborne and Waters (2002) highlight four assumptions of regression that researchers should always test, the first of which is the normality assumption. They write “Non-normally distributed variables (highly skewed or kurtotic variables, or variables with substantial outliers) can distort relationships and significance tests”. And since only few research articles report having tested the assumptions underlying the tests presented, Osborne and Waters (2002) worry that they are “forced to call into question the validity of many of these results, conclusions and assertions”.
Between those two ends of the spectrum, many authors adopt a cautious attitude, and regard models that violate the distributional assumptions as ranging from “risky” to “not appropriate”, hence pleading for the use of transformations (e.g., Bishara & Hittner, 2012; Miller, 1986; Puth et al., 2014), non-parametric statistics (e.g., Miller, 1986), randomization procedures (e.g., Bishara & Hittner, 2012; Puth et al., 2014), or generalized linear models where the Gaussian error structure can be changed to other error structures (e.g., Poisson, binomial, negative binomial) that may better suit the nature of the data at hand (Fordyce et al., 2011; Harrison et al., 2018; O'Hara, 2009; O'Hara & Kotze, 2010; Szöcs & Schäfer, 2015; Warton et al., 2016; Warton & Hui, 2011). The latter suggestion, however, may bear a much more serious risk: while Gaussian models are generally accepted to be fairly robust to non-normal errors (here and in the following, we mean by “robust” ensuring a reasonably low rate of type I errors), Poisson models are highly sensitive if their distributional assumptions are violated (see Box 1), leading to a substantially increased risk of type I errors if overdispersion remains unaccounted for (Ives, 2015; Szöcs & Schäfer, 2015; Warton et al., 2016; Warton & Hui, 2011).
In face of this diverse literature, it is rather understandable that empirical researchers are largely uncertain about the importance of adhering to the normality assumption in general, and about how much deviation and which form of deviation might be tolerable under which circumstances (in terms of sample size and significance level threshold). With the present article we hope to provide clarification and guidance.
We here use Monte Carlo simulations to explore how violations of the normality assumption affect the probability of drawing false-positive conclusions (the rate of type I errors), because these are the greatest concern in the current reliability crisis (Open Science Collaboration, 2015). We aim at deriving simple rules of thumb, which researchers can use to judge whether the violation may be tolerable and whether the p value can be trusted. We also assess the effects of violating the normality assumption in terms of bias and precision on parameter estimation. Furthermore, we provide an R package (“TrustGauss”) that researchers can use to explore the effect of specific distributions on the reliability of p values and parameter estimates.
Counter to intuition, but consistent with a considerable body of literature (Ali & Sharma, 1996; Box & Watson, 1962; Gelman & Hill, 2007; Lumley et al., 2002; Miller, 1986; Puth et al., 2014; Ramsey & Schafer, 2013; Schielzeth et al., 2020; Warton et al., 2016; Williams et al., 2013; Zuur et al., 2010), we find that violations of the normality of residuals assumption are rarely problematic for hypothesis testing and parameter estimation, and we argue that the commonly recommended solutions may bear greater risks than the one to be solved.
The linear regression model and its assumptions
At this point, we need to briefly introduce the notation for the model of least squares linear regression. In its simplest form, it can be formulated as Yi = a + b × Xi + ei, where each element of the dependent variable Yi is linearly related to the predictor Xi through the regression coefficient b (slope) and the intercept a. ei is the error or residual term, which describes the deviations (residuals) of the actual from the true unobserved (error) or the predicted (residual) Yi and whose sum equals zero (Gelman & Hill, 2007; Sokal & Rohlf, 1995). An F-test is usually employed for testing the significance of regression models (Ali & Sharma, 1996).
Basic statistics texts introduce (about) five assumptions that need to be met for interpreting all estimates from linear regression models safely (Box 2: validity, independence, linearity, homoscedasticity of the errors and normality of the errors; Gelman & Hill, 2007). Out of these assumptions, normally distributed errors are generally assumed to be the least important (yet probably the most widely known; Gelman & Hill, 2007; Lumley et al., 2002). Deviations from normality usually do not bias regression coefficients (Ramsey & Schafer, 2013; Williams et al., 2013) or impair hypothesis testing (no inflated type I error rate, e.g., Bishara & Hittner, 2012; Ives, 2015; Puth et al., 2014; Ramsey & Schafer, 2013; Szöcs & Schäfer, 2015; Warton et al., 2016) even at relatively small sample sizes. With large sample sizes ≥ 500 the Central Limit Theorem guarantees that the regression coefficients are on average normally distributed (Ali & Sharma, 1996; Lumley et al., 2002).
Box 2 Five assumptions of regression models: validity, independence, linearity, homoscedasticity of the errors and normality of the errors (Gelman & Hill, 2007). Three of these criteria are concerned with the dependent variable Y, or—to be more precise—the regression error e (assumptions 2, 4, and 5, see below). The predictor X is often not considered, although e is supposed to be normal and of equal magnitude at every value of X (1) Validity is not a mathematical assumption per se, but it still poses “the most challenging step in the analysis” (Gelman & Hill, 2007), namely that regression should enable the researcher to answer the scientific question at hand (Kass et al., 2016). (2) Each value of the dependent variable Y is influenced by only a single value of the predictor X, meaning that all observations and regression errors ei are independent (Quinn & Keough, 2002). Dependence among observations commonly arises either through cluster (i.e., data collected on subgroups) or serial effects (i.e., data collected in temporal or spatial proximity; Ramsey & Schafer, 2013). We will discuss the independence assumption later because it is arguably the riskiest to violate in terms of producing type I errors (Zuur et al., 2009; see “A word of caution”). (3) The dependent variable Y and the predictors should be linearly (and additively) related through the regression coefficient b. That being said, quadratic or higher-order polynomial relationships can also be accommodated by squaring or raising the predictor variable X to a higher power, because Y is still modelled as a linear function through the regression coefficient (Williams et al., 2013). (4) The variance in the regression error e (or the spread of the response around the regression line) is constant across all values of the predictor X, i.e., the samples are homoscedastic. Deviations from homoscedasticity will not bias parameter estimates of the regression coefficient b (Gelman & Hill, 2007). Slight deviations are thought to have only little effects on hypothesis testing (Osborne & Waters, 2002) and can often be dealt with by weighted regression, mean-variance stabilizing data transformations (e.g., log-transformation) or estimation of heteroscedasticity-robust standard errors (Huber, 1967; Miller, 1986; White, 1980; Zuur et al., 2009; see “A word of caution” for further discussion). (5) The errors of the model should be normally distributed (normality assumption), which should be tested via inspecting the distribution of the model residuals e (Zuur et al., 2010). Both visual approaches (probability or QQ-plots) and formal statistical tests (Shapiro–Wilk) are commonly applied. Formal tests for normality have been criticized because they have low power at small sample sizes and almost always yield significant deviations from normality at large sample sizes (Ghasemi & Zahediasl, 2012). Thus, researchers are mostly left with their intuition to decide how severely the normality assumption is violated and how robust regression is to such violations. A researcher who examines the effect of a single treatment on multiple dependent variables (e.g., health parameters) may adhere strictly to the normality assumption and thus switch forth and back between reporting parametric and non-parametric test statistics depending on how strongly the trait of interest deviates from normality, rendering a comparison of effect sizes difficult. |
Importantly, the robustness of regression methods to deviations from normality of the regression errors e does not only depend on sample size, but also on the distribution of the predictor X (Box & Watson, 1962; Mardia, 1971). Specifically, when the predictor variable X contains a single outlier, then it is possible that the case coincides with an outlier in Y, creating an extreme observation with high leverage on the regression line. This is the only case where statistical significance gets seriously misestimated based on the assumption of Gaussian errors in Y which is violated by the outlier in Y. This problem has been widely recognized (Ali & Sharma, 1996; Box & Watson, 1962; Miller, 1986; Osborne & Waters, 2002; Ramsey & Schafer, 2013; Zuur et al., 2010) leading to the conclusion that Gaussian models are robust as long as there are no outliers that occur in X and Y simultaneously. Conversely, violations of the normality assumption that do not result in outliers should not lead to elevated rates of type I errors.
Distributions of empirical data may deviate from a Gaussian distribution in multiple ways. Rather than being continuous, data may be discrete, such as integer counts or even binomial character states (yes/no data). Continuous variables may deviate from normality in terms of skewness (showing a long tail on one side), kurtosis (curvature leading to light or heavy tails), and even higher-order moments. All these deviations are generally thought to be of little concern (e.g., Bishara & Hittner, 2012), even if they are far from fitting to the bell-shaped curve, such as binomial data (Cochran, 1950). However, heavily skewed distributions typically result in outliers, which, depending on the distribution of X, can be problematic in terms of type I error rates as just explained above (see also Blair & Lawson, 1982). In our simulations we try to representatively cover much of the diversity in possible distributions, in order to provide a broad overview that extends beyond the existing literature. We focus on fairly drastic non-normality because only little bias can be expected from minor violations (Bishara & Hittner, 2012; Glass et al., 1972; Hack, 1958; Puth et al., 2014).
Simulations to assess effects on p values, power, and parameter estimates
To illustrate the consequences of violating the normality assumption, we performed Monte Carlo simulations on five continuous and five discrete distributions that were severely skewed, platy- and leptokurtic or zero-inflated (distributions D0–D9, Table 1), going beyond previous studies that examined less dramatic violations (Bishara & Hittner, 2012; Ives, 2015; Puth et al., 2014; Szöcs & Schäfer, 2015; Warton et al., 2016) but that are still of biological relevance (Frank, 2009; Gelman & Hill, 2007; Zuur et al., 2009). For example, measures of fluctuating asymmetry are distributed half-normally (distribution D4, Table 1) or survival data can be modelled using a gamma distribution (distribution D9, Table 1). The R-code for generating these distributions can be found in the R package “TrustGauss” in the Supplementary Material, where we also provide the specific parameter settings used for generating distributions D0–D9. Moments of these distributions are provided in Table 1. We explored these 10 distributions across a range of sample sizes (N = 10, 25, 50, 100, 250, 500, 1000). Starting with the normal distribution D0 for reference, we sorted the remaining distributions D1–D9 by increasing tendency to produce strong outliers because these are known to be problematic (calculated as the average proportion of data points with Cook’s distance exceeding a critical value (see below) at a sample size of N = 10). We used these data both as our dependent variable Y and as our predictor variable X in linear regression models, yielding 10 × 10 = 100 combinations of Y and X for each sample size (see Fig. S1 for distributions of the independent variable Y, the predictor X, and residuals). A detailed documentation of the TrustGauss-functions and their application is provided in the Supplement.

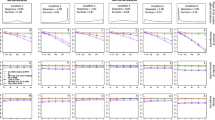
p values from Gaussian linear regression models are in most cases unbiased. a Overview of the ten different distributions that we simulated. Distributions D0 is Gaussian and all remaining distributions are sorted by their tendency to produce strong outliers. Distributions D1, D2, D6, D7, and D8 are discrete. The numbers D0–D9 refer to the plots in b–e where on the Y-axis the distribution of the dependent variable and on the X-axis of the predictor is indicated. b Type I error rate at an α-level of 0.05 for sample sizes of N = 10, 100, and 1000. Red colors represent increased and blue conservative type I error rates. c Scale shift parameter, d bias in p values at an expected p value of 10-3 and e bias in p values at an expected p value of 10-4
We assessed the significance of all models by comparing them to models fitted without the predictor of interest and an F-test wherever possible and used a likelihood ratio test otherwise (through a call to the anova function; see Supplement for details). We fitted these models to 50,000 datasets for each combination of the dependent and predictor variable. We did not simulate any effect, which means that both the regression coefficient b and the intercept a were on average zero (TrustGauss function in the TrustGauss R package). This enabled us to use the frequency of all models that yielded a p value ≤ 0.05 as an estimate of the type I error rate at a significance level (α) of 0.05. The null distribution of p values is uniform on the interval [0,1] and because all p values are independent and identically distributed, we constructed concentration bands using a beta-distribution (cf. Casella & Berger, 2002; Knief et al., 2017; QQ-plots of expected vs. observed p values are depicted in Fig. S1). We assessed the deviation of observed from expected -log10(p values) at an expected exponent value of 3 (p = 10-3; -log10(10-3) = 3) and 4 (p = 10-4) and by estimating the scale shift parameter υ = σobserved / σexpected (Lin, 1989), where σ is the standard deviation in -log10(p values). We further calculated studentized residuals (R), hat values (H) and Cook’s distances (D) as measures of discrepancy, leverage and influence, respectively, and assessed which proportion exceeded critical values of R > 2, H > (2 × (k + 1)) / n and D > 4 / (n - k - 1), where k is the number of regression slopes and n is the number of observations (Zuur et al., 2007).
Since some of the predictor variables were binary rather than continuous, our regression models also comprise the situation of classical two-sample t tests, and we assume that the results would also generalize to the situation of multiple predictor levels (ANOVA), which can be decomposed to multiple binary predictors. To demonstrate that our conclusions from univariate models (involving a single predictor) generalize to the multivariate case (involving several predictors), we fitted the above models with a sample size of N = 100 to the same ten dependent variables with three normally distributed predictors and one additional predictor sampled from the ten different distributions. We compared models including all four predictors to those including only the three normally distributed predictors as described above. We further fitted the above models as mixed-effects models using the lme4 R package (v1.1-14, Bates et al., 2015). For that we simulated N = 100 independent samples each of which was sampled twice, such that the single random effect “sample ID” explained roughly 30% of the variation in Y (TrustGaussLMM function) and assessed significance as described above through model comparisons. We encourage readers to try their own simulations using our R package.
We evaluated power, bias and precision of parameter estimates using a sample size of N = 10, 100, 1000 and the same ten distributions (D0–D9) as above (TrustGaussTypeII function). First, we sampled the independent variable Y and the covariate X from one of the ten distributions, yielding ten × 10 = 100 combinations of Y and X for each sample size. Then, we Z-transformed the independent variable Y and the covariate X, which does not change the shape of their distributions but makes the regression coefficient b equal to the predefined effect size r. Hence, we obtained expected values for b (see below), but we stress that the Z-transformation can also be disabled in the TrustGauss R package. Last, we used an iterative algorithm (SI technique, Ruscio & Kaczetow, 2008, code taken from Schönbrodt, 2012 and evaluated by us) that samples from the Z-transformed distributions of Y and X to introduce a predefined effect size of r = 0.15, 0.2, and 0.25 in 50,000 simulations. Additionally, to remove the dominating effect of sample size on power calculations, we calculated the effect size that would be needed to reach a power of 0.5 (rounded to the third decimal) for N = 10, 100, and 1000 if Y and X were normally distributed using the powerMediation R package (v0.2.9, Dupont & Plummer, 1998; Qiu, 2018). This yielded effect sizes of 0.59, 0.19, and 0.062, respectively. We then introduced effects of such magnitudes with their respective sample sizes in 50,000 simulations. For distribution D6 and the combinations of D8 with D9 we were unable to introduce the predefined effect size also at very large sample sizes (N = 100,000) and we removed those from further analyses. We estimated power (β) as the proportion of all simulations that yielded a significant (at α = 0.05 or α = 0.001) regression coefficient b. In the case of normally distributed Y and X, this yielded power estimates that corresponded well with the expectations calculated using the powerMediation R package (v0.2.9, Table S1, Dupont & Plummer, 1998; Qiu, 2018). We used the mean and the coefficient of variation (CV) of the regression coefficient b as our measures of bias and precision, respectively. We also assessed interpretability and power of Gaussian versus binomial (mean = 0.75) and Poisson (mean = 1) at a sample size of N = 100 by fitting models with a Gaussian, binomial, or Poisson error structure in the glms. The effect sizes were chosen such that we reached a power of around 0.5 (see Table S2 for details on distributions and effect sizes) and models were fitted to 50,000 of such datasets.
Results
Effects on p values
The rate at which linear regression models with Gaussian error structure produced false-positive results (type I errors) was very close to the expected value of 0.05 (Fig. 1b). When sample size was high (N = 1000), type I error rates ranged only between 0.044 and 0.052, across the 100 combinations of distributions of the dependent variable Y and the predictor X. Hence, despite of even the most dramatic violations of the normality assumption (see e.g., distributions D8 and D9 in Fig. 1a), there was no increased risk of obtaining false-positive results. At N = 100, the range was still remarkably narrow (0.037–0.058), and only for very low sample sizes (N = 10) we observed four out of 100 combinations which yielded notably elevated type I error rates in the range of 0.086 to 0.11. These four cases all involved combinations of the distributions D8 and D9, which yield extreme leverage observations (Fig. S2). For this low sample size of N = 10, there were also cases where type I error rates were clearly too low (down to 0.015, involving distributions D1–D3 where extreme values are rarer than under the normal distribution D0; for details see Fig. S2 and Table S3).
Next, we examine the scale shift parameter (Fig. 1c) which evaluates the match between observed and expected distributions of p values across the entire range of p values (not only the fraction at the 5% cut-off). Whenever either the dependent variable Y or the predictor X was normally distributed, the observed and expected p values corresponded very well (first row and first column in Fig. 1c). Accordingly, the p values fell within the 95% concentration bands across their entire range (rightmost column in Fig. S1). This observation was unaffected by sample size (Table S4). However, if both the dependent variable Y and the predictor X were heavily skewed, consistently inflated p values outside the concentration bands occurred, yet this was almost exclusively limited to the case of N = 10 (Fig. 1c). For larger sample sizes only the most extreme distribution D9 produced somewhat unreliable p values (Fig. 1c). This latter effect of unreliable (mostly anti-conservative) p values was most pronounced when judgements were made at a very strict α-level (Fig. 1d α = 0.001 and Fig. 1e α = 0.0001). At a sample size of N = 100, and for α = 0.001, observed -log10(p values) were biased maximally 3.36-fold when both X and Y were sampled from distribution D9. This means that p values of about p = 10-10 occurred at a rate of 0.001 (p = 10(-3 × 3.36) = 10-10.08; Fig. 1d). At N = 100, and for α = 0.0001, the bias was maximally 4.54-fold (Fig. 1e). Our multivariate and mixed-model simulations confirmed that these patterns are general and also apply to models with multiple predictor variables (Fig. S3) and to models with a single random intercept (Fig. S4).
Based on the 100 simulated scenarios that we have constructed, p values from Gaussian models are highly robust to even extreme violation of the normality assumption and can be trusted, except when involving X and Y distributions with extreme outliers (distribution D9; see also Blair & Lawson, 1982). For very small sample sizes, judgements should preferably be made at α = 0.05 (rather than at more strict thresholds) and should also beware of outliers in both X and Y. The same distributions of the dependent and the independent variable introduced the same type I error rates, meaning that effects were symmetric (Box & Watson, 1962). We reference the reader to the “A word of caution” section, where we discuss both the assumption of equal variances of the errors and the effects of non-normality on other applications of linear regression.
Effects on power and parameter estimates
Power of linear regression models with a Gaussian error structure was only weakly affected by the distributions of Y and X, whereas sample size and effect size were much more influential (Fig. 2b, Figs. S5b, S6b). Power appears to vary notably between distributions when sample size and hence power are small (N = 10 in Fig. 2b), but this variability rather closely reflects the corresponding type I error rates shown in Fig. 1b (Pearson correlation r = 0.69 between Figs. 1b and 2b across the N = 79 combinations with power estimates at regression coefficient b = 0.2 and sample size N = 10). To assess the effects of sample size and non-normality on power, we adjusted the regression coefficients such that power stayed constant at 50% for normally distributed Y and X at sample sizes of N = 10, 100 and 1000 (b = 0.59, 0.19 and 0.062, respectively, Fig. 2c). Then, for N = 1000, power was essentially unaffected by the distribution of Y and X, ranging from 0.48 to 0.52 for all but one combination of Y and X (β = 0.45 when Y and X are distributed as D9, that is gamma Γ(0.1, 100), Table 1). In that particular combination, power was not generally reduced but the distribution of p values was shifted, such that power could either be reduced or increased depending on the α-threshold (at α = 0.001 that combination yielded the highest power). At N = 100, power varied slightly more (0.44–0.60) but still 87% of all power estimates were between 0.48 and 0.52. Only at a sample size of N = 10, power varied considerably between 0.05 and 0.87 (30% of all estimates between 0.48 and 0.52, Fig. 2c).

Power, bias, and precision of parameter estimates from Gaussian linear regression models are in most cases unaffected by the distributions of the dependent variable Y or the predictor X. a Overview of the different distributions that we simulated, which were the same as in Fig. 1. The numbers D0–D9 refer to the plots in b–e where on the Y-axis the distribution of the dependent variable and on the X-axis of the predictor is indicated. b Power at a regression coefficient b = 0.2 for sample sizes of N = 10, 100, and 1000. Red colors represent increased power. c Power at regression coefficients b = 0.59, 0.19, and 0.06 for sample sizes of N = 10, 100, and 1000, respectively, where the expected power derived from a normally distributed Y and X is 0.5. Red colors represent increased and blue colors decreased power. d Bias and e precision of the regression coefficient estimates at an expected b = 0.2 for sample sizes of N = 10, 100, and 1000
For most distributions of Y and X, regression coefficients were unbiased, which follows from the Lindeberg-Feller Central Limit Theorem (Lumley et al., 2002). The strongest bias occurred at a sample size of N = 10 and when the distribution of X was highly skewed (D9), resulting in such a high frequency of high-leverage observations that the Lindeberg-Feller Central Limit Theorem did not hold (Fig. S2). In the most extreme case, the mean regression coefficients at N = 10 were below zero (indicated as additional white squares in Fig. S5d, S6d). However, the bias shrunk to maximally 1.32-fold when the sample size increased to N = 100 and to 1.03-fold at a sample size of N = 1000 (Fig. 2d).
We used the coefficient of variation in regression coefficients as our measure of the precision of parameter estimates. Similar to the pattern in bias, regression coefficients were precise for most distributions of Y and X and the lowest precision occurred at a sample size of N = 10 and when the distribution of X was highly skewed (D9). However, there was no gain in precision when increasing the sample size from N = 100 to N = 1000 (Fig. 2e) and precision slightly decreased at larger effect sizes (Fig. S5e, S6e).
We conclude that in our 79 simulated scenarios, neither power nor bias or precision of parameter estimates are heavily affected by violations of the normality assumption by both the distributions of the dependent variable Y and the predictor X, except when involving predictors with extreme outliers (i.e., high leverage, distribution D9). An increase in sample size protects against severely biased parameter estimates but does not make estimates more precise. We provide further advice in the “A word of caution” section.
Comparison between error distributions
In the previous section, we have shown that Gaussian models are robust to violations of the normality assumption. How do they perform in comparison to Poisson and binomial models and how do Poisson models perform if their distributional assumptions are violated? To address these questions, we fitted glms with a Gaussian, Poisson, or binomial error structure to data where the dependent variable Y was Gaussian, Poisson, or binomial distributed and the predictor variable X followed a Gaussian, gamma, or binomial distribution. This allowed us to directly compare the effect of the error structure on power, bias, and precision of the parameter estimate. Interestingly, models with a Gaussian error structure were largely comparable in terms of power and bias to those fitted using the appropriate error structure. However, parameter estimates were less precise using the Gaussian error structure (Table 2), which argues in favor of the more specialized models for the purpose of parameter estimation.
More importantly for the reliability of science, and in contrast to Gaussian models, Poisson models are not at all robust to violations of the distribution assumption. For comparison, we fitted the above univariate models involving the five discrete distributions (D1, D2, D6, D7, D8) with a sample size of N = 100 using a Poisson error structure (inappropriately). This yielded heavily biased type I error rates (at α = 0.05) in either direction ranging from 0 to as high as 0.55 (Fig. 3, right column, Fig. S7). Yet when also inappropriately modeling these distributions as Gaussian, type I error rates are very close to the nominal level of 0.05 (Fig. 3, left column). Controlling for overdispersion in counts through the use of a glmm with an observation-level random effect (Harrison et al., 2018) fixed the problem of inflated type I error rates for distributions D2 and D7 (Fig. 3, indicated in red) but did not solve the problem of low power for distributions D1, D6, and D8 (Fig. 3, indicated in blue). Using a quasi-likelihood method (“Quasipoisson”, Wedderburn, 1974) provided unbiased type I error rates, like in the Gaussian models (Fig. 3), but this quasi-likelihood method is not available in the mixed-effects package lme4 in R (Bates et al., 2015).

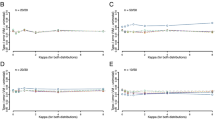
Distribution of observed p values (when the null hypothesis is true) as a function of different model specifications (columns) and different distributions of the dependent variable Y (rows a to e). Each panel was summed up across ten different distributions of the predictor X (500,000 simulations per panel with N = 100 data points per simulation). Models were fitted either as glms with a Gaussian error structure that violate the normality assumption (first column), as glms with a Quasipoisson error structure that take overdispersion into account (second column), as glmms with a Poisson error structure and an observation-level random effect (OLRE; Harrison et al., 2018) or as glms with a Poisson error structure that violate the assumption of the Poisson distribution. In each panel, TIER indicates the realized type I error rate (across the ten different predictor distributions), highlighted with a color scheme as in Fig. 1b (blue: below the nominal level of 0.05, red: above the nominal level, grey: closely matching the nominal level). The dependent variable Y was distributed as a distribution D1, b distribution D2, c distribution D6, d distribution D7 or e distribution D8 (see Table 1 and Fig. 1a for details)
A word of caution
Our finding that violations of the normality assumption are relatively unproblematic with regard to type I errors should not be misunderstood as a carte blanche to violate any assumption of linear models. The probably riskiest assumption to violate (in terms of producing type I errors) is the assumption of independence of data points (Forstmeier et al., 2017; Kass et al., 2016; Saravanan et al., 2020), because one tends to overestimate the amount of independent evidence that is provided by the data points, which are not real replicates (hence this is called “pseudoreplication”).
Another assumption that is not to be ignored concerns the homogeneity of variances across the entire range of the predictor variable (Box, 1953; Glass et al., 1972; McGuinness, 2002; Miller, 1986; Osborne & Waters, 2002; Ramsey & Schafer, 2013; Williams et al., 2013; Zuur et al., 2009). Violating this assumption may result in more notable increases of type I errors (compared to what we examined here) at least when the violations are drastic. For instance, when applying a t test that assumes equal variances in both groups to data that come from substantially different variances (e.g., σ12/ σ22 = 0.1), then high rates of type I errors (e.g., 23%) may be obtained in a situation where sample sizes are unbalanced (N1 = 15, N2 = 5), namely when the small sample comes from the more variable group (Glass et al., 1972; Miller, 1986). Also in this example, it is the influence of outliers (small N sampled from large variance) that results in misleading p values. We further carried out some extra simulations to explore whether non-normality tends to exacerbate the effects of heteroscedasticity on type I error rates, but we found that normal and non-normal data behaved practically in the same way (see Supplementary Methods and Table S5). Hence, heteroscedasticity can be problematic, but this seems to be fairly independent of the distribution of the variables.
Diagnostic plots of model residuals over fitted values can help identifying outliers and recognizing heterogeneity in variances over fitted values. Transformation of variables is often a helpful remedy if one observes that variance strongly increases with the mean. This typically occurs in comparative studies, where e.g., body size of species may span several orders of magnitude (calling for a log-log plot). Most elegantly, heteroscedasticity can be modeled directly, for instance by using the “weights” argument in lme (see Pinheiro & Bates, 2000, p. 214), which also enables us to test directly whether allowing for heteroscedasticity increases the fit of the model significantly. Similarly, heteroscedasticity-consistent standard errors could be estimated (Hayes & Cai, 2007). For more advice on handling heteroscedasticity, see McGuinness (2002).
Another word of caution when running Gaussian models on non-Gaussian data should be expressed when it comes to the interpretation of parameter estimates of models. If the goal of modelling lies in the estimation of parameters (rather than hypothesis testing) then such models should be regarded with caution. First, recall that distributions with extreme outliers are often better characterized by their median than by their mean, which gets pulled away by extreme values. Second, parameter estimates for counts or binomial traits may be acceptable for interpretation when they refer to the average condition (e.g., a typical family having 1.8 children consisting of 50% boys). However, parameter estimates may become nonsensical outside the typical range of data (e.g., negative counts or probabilities). In such cases, one might also consider fitting separate models for parameter estimation and for hypothesis testing (Warton et al., 2016).
In the above, we were exclusively concerned with associations between variables, that is parameter estimates derived from the whole population of data points. However, sometimes we might be interested in predicting the response of specific individuals in the population and we need to estimate a prediction interval. In that case, a valid prediction interval requires the normality assumption to be fulfilled because it is based directly on the distribution of Y (Lumley et al., 2002; Ramsey & Schafer, 2013).
Finally, in most of our simulations, we fitted a single predictor to the non-normal data and observed only minor effects on the type I errors. Our multivariate (involving several predictors) and mixed-model (including a single random intercept) simulations confirmed these observations. However, we did not cover collinearity between predictors or the distribution of random effects, but others have dealt with these aspects before (Freckleton, 2011; Schielzeth et al., 2020).
The issue of overdispersion in non-Gaussian models
We have shown that Poisson models yielded heavily biased type I error rates (at α = 0.05) in either direction ranging from 0 to as high as 0.55 when their distribution assumption is violated (Fig. 3 right column, Fig. S7). This of course is an inappropriate use of the Poisson model, but still this is not uncommonly found in the scientific literature. Such inflations of type I error rates in glms already have been reported frequently (Ives, 2015; Szöcs & Schäfer, 2015; Warton et al., 2016; Warton & Hui, 2011; Young et al., 1999) and this problem threatens the reliability of research whenever such models are implemented with insufficient statistical expertise.
First, it is absolutely essential to control for overdispersion in the data (that is more extreme counts than expected under a Poisson process), either by using a quasi-likelihood method (“Quasipoisson”) or by fitting an observation level random effect (“OLRE”; Fig. 3). Overdispersion may already be present when counts refer to discrete natural entities (for example counts of animals), but may be particularly strong when Poisson errors are less appropriately applied to measurements of areas (e.g., counts of pixels or mm2), latencies (e.g., counts of seconds), or concentrations (e.g., counts of molecules). Similarly, there may also be overdispersion in counts of successes versus failures that are being analyzed in a binomial model (e.g., fertile versus infertile eggs within a clutch). Failure to account for overdispersion (as in Fig. 3b, d) will typically result in very high rates of type I errors (Forstmeier et al., 2017; Ives, 2015; Szöcs & Schäfer, 2015; Warton et al., 2016; Warton & Hui, 2011; Young et al., 1999).
Second, even after accounting for overdispersion, some models may still yield inflated or deflated type I error rates (not observed in our examples of Fig. 3), therefore requiring statistical testing via a resampling procedure (Ives, 2015; Saravanan et al., 2020; Szöcs & Schäfer, 2015; Warton et al., 2016; Warton & Hui, 2011), but this may also depend on the software used. While several statistical experts have explicitly advocated for such a sophisticated approach to count data (Harrison et al., 2018; O'Hara, 2009; O'Hara & Kotze, 2010; Szöcs & Schäfer, 2015; Warton et al., 2016), we are concerned about practicability when non-experts have to make decisions about the most adequate resampling procedure, particularly when there are also non-independencies in the data (random effects) that have to be considered. In this field of still developing statistical approaches, it seems much easier to get things wrong (and obtain a highly overconfident p value) than to get everything right (Bolker et al., 2009).
In summary, we are worried that authors being under pressure to present statistically significant findings will misinterpret type I errors (due to incorrect implementation) optimistically as a true finding and misattribute the gained significance to a presumed gain of power when fitting the “appropriate” error structure (note that such power gains should be quite small; see Table 2 and also Szöcs & Schäfer, 2015; Warton et al., 2016). Moreover, we worry that sophisticated methods may allow presenting nearly anything as statistically significant (Simmons et al., 2011) because complex methods will only rarely be questioned by reviewers.
Practical advice
Anti-conservative p values usually do not arise from violating normality in Gaussian models (except for the case of influential outliers), but rather from various kinds of non-independencies in the data (see Box 1). While more advanced statistical methods may lead to additional insights when parameter estimation and prediction are primary objectives, they also bear the risk of inflated type I error rates. We therefore recommend the Gaussian mixed-effect model as a trustworthy and universal standard tool for hypothesis testing, where transparent reporting of the model’s random effect structure clarifies to the reader which non-independencies in the data were accounted for. Non-normality should not be a strong reason for switching to a more specialized technique, at least not for hypothesis testing, and such techniques should only be used with a good understanding of the risks involved (see Box 1).
To avoid the negative consequences of strong deviations from normality that may occur under some conditions (see Fig. 1) it may be most advisable to apply a rank-based inverse normal (RIN) transformation (aka rankit scores, Bliss, 1967) to the data, which can approximately normalize most distributional shapes and which effectively minimizes type I errors and maximizes statistical power (Bishara & Hittner, 2012; Puth et al., 2014). Note that we have avoided transformations in our study simply to explore the consequences of major non-normality, but we agree with the general wisdom that transformations can mitigate problems with outliers (Osborne & Overbay, 2004), heteroscedasticity (McGuinness, 2002), and sometimes with interpretability of parameter estimates.
In practice, we recommend the following to referees:
-
(1)
When a test assumes Gaussian errors, request a check for influential observations, particularly if very small p values are reported. Consider recommending a RIN-transformation or other transformations for strong deviations from normality.
-
(2)
For Poisson models or binomial models of counts, always check whether the issues of overdispersion and resampling are addressed, otherwise request an adequate control for type I errors or verification with Gaussian models.
-
(3)
For randomization tests, request clarity about whether observed patterns may be influenced by non-independencies in the data that are broken up by the randomization procedure. If so, ask for possible alternative ways of testing or of randomizing (e.g., hierarchical or blockwise bootstrap).
-
(4)
When requesting a switch to more demanding techniques (e.g., non-Gaussian models, randomization techniques), reviewers should accompany this recommendation with sufficient advice, caveats and guidance to ensure a safe and robust implementation. Otherwise, the review process may even negatively impact the reliability of science if reviewers request analyses that authors are not confident to implement safely.
Conclusions
If we are interested in statistical hypothesis testing, linear regression models with a Gaussian error structure are generally robust to violations of the normality assumption. When non-independencies in the data are accounted for through fitting the appropriate random effect structure and the other assumptions of regression models are checked (see Box 2), judging p values at the threshold of α = 0.05 is nearly always safe even if the data are not normally distributed. However, if both Y and X are skewed, we should avoid being overly confident in very small p values and examine whether these result from outliers in both X and Y (see also Blair & Lawson, 1982; Osborne & Overbay, 2004). With this caveat in mind, violating the normality assumption is relatively unproblematic and there is much to be gained when researchers follow a standardized way of reporting effect sizes (Lumley et al., 2002). This is good news also for those who want to apply models with Gaussian error structure to binomial or count data when models with other structures fail to reach convergence or produce nonsensical estimates (e.g., Ives & Garland, 2014; Plaschke et al., 2019). While Gaussian models are rarely misleading, other approaches (see examples in Box 1) may bear a non-trivial risk of yielding anti-conservative p values when applied by scientists with limited statistical expertise.
Data availability
References
Ali MM, Sharma SC (1996) Robustness to nonnormality of regression F-tests. J Econom 71, 175–205.
Arnqvist G (2020) Mixed models offer no freedom from degrees of freedom. Trends Ecol Evol 35, 329–335.
Barr DJ, Levy R, Scheepers C, Tily HJ (2013) Random effects structure for confirmatory hypothesis testing: keep it maximal. J Mem Lang 68, 255–278.
Bates D, Mächler M, Bolker BM, Walker SC (2015) Fitting linear mixed-effects models using lme4. J Stat Softw 67, 1–48.
Bishara AJ, Hittner JB (2012) Testing the significance of a correlation with nonnormal data: comparison of Pearson, Spearman, transformation, and resampling approaches. Psychol Methods 17, 399–417.
Blair RC, Lawson SB (1982) Another look at the robustness of the product-moment correlation coefficient to population non-normality. Florida J Educ Res 24, 11–15.
Bliss CI (1967) Statistics in biology. McGraw-Hill.
Bolker BM, Brooks ME, Clark CJ, Geange SW, Poulsen JR, Stevens MHH, White JSS (2009) Generalized linear mixed models: a practical guide for ecology and evolution. Trends Ecol Evol 24, 127–135.
Box GEP (1953) Non-normality and tests on variances. Biometrika 40, 318–335.
Box GEP, Watson GS (1962) Robustness to non-normality of regression tests. Biometrika 49, 93–106.
Brooks ME, Kristensen K, van Benthem KJ, Magnusson A, Berg CW, Nielsen A, … Bolker BM (2017) Modeling zero-inflated count data with glmmTMB. bioRxiv, e132753.
Brunner J, Austin PC (2009) Inflation of type I error rate in multiple regression when independent variables are measured with error. Can J Stat 37, 33–46.
Camerer CF, Dreber A, Holzmeister F, Ho TH, Huber J, Johannesson M, … Wu H (2018) Evaluating the replicability of social science experiments in Nature and Science between 2010 and 2015. Nat Hum Behav 2, 637–644.
Casella G, Berger RL (2002) Statistical inference. Duxbury Press.
Cochran WG (1950) The comparison of percentages in matched samples. Biometrika 37, 256–266.
Dupont WD, Plummer WD (1998) Power and sample size calculations for studies involving linear regression. Control Clin Trials 19, 589–601.
Ebersole CR, Atherton OE, Belanger AL, Skulborstad HM, Allen JM, Banks JB, … Nosek BA (2016) Many labs 3: evaluating participant pool quality across the academic semester via replication. J Exp Soc Psychol 67, 68–82.
Fordyce JA, Gompert Z, Forister ML, Nice CC (2011) A hierarchical Bayesian approach to ecological count data: a flexible tool for ecologists. PLOS ONE 6, e26785.
Forstmeier W, Wagenmakers EJ, Parker TH (2017) Detecting and avoiding likely false-positive findings – a practical guide. Biol Rev 92, 1941–1968.
Frank SA (2009) The common patterns of nature. J Evol Biol 22, 1563–1585.
Freckleton RP (2011) Dealing with collinearity in behavioural and ecological data: model averaging and the problems of measurement error. Behav Ecol Sociobiol 65, 91–101.
Gelman A, Hill J (2007) Data analysis using regression and multilevel/hierarchical models. Cambridge University Press.
Ghasemi A, Zahediasl S (2012) Normality tests for statistical analysis: a guide for non-statisticians. Int J Endocrinol Metab 10, 486–489.
Glass GV, Peckham PD, Sanders JR (1972) Consequences of failure to meet assumptions underlying the fixed effects analysis of variance and covariance. Rev Educ Res 42, 237–288.
Good PI (2005) Permutation, parametric, and bootstrap tests of hypotheses. Springer.
Hack HRB (1958) An empirical investigation into the distribution of the F-ratio in samples from two non-normal populations. Biometrika 45, 260–265.
Harrison XA (2014) Using observation-level random effects to model overdispersion in count data in ecology and evolution. PeerJ 2, e616.
Harrison XA (2015) A comparison of observation-level random effect and Beta-Binomial models for modelling overdispersion in Binomial data in ecology & evolution. PeerJ 3, e1114.
Harrison XA, Donaldson L, Correa-Cano ME, Evans J, Fisher DN, Goodwin CE, … Inger R (2018) A brief introduction to mixed effects modelling and multi-model inference in ecology. PeerJ 6, e4794.
Hayes AF, Cai L (2007) Using heteroskedasticity-consistent standard error estimators in OLS regression: an introduction and software implementation. Behav Res Methods 39, 709–722.
Huber PJ (1967) The behavior of maximum likelihood estimates under nonstandard conditions. Berkeley Symp on Math Statist and Prob 5.1, 221–233.
Ihle M, Pick JL, Winney IS, Nakagawa S, Burke T (2019) Measuring up to reality: null models and analysis simulations to study parental coordination over provisioning offspring. Front Ecol Evol 7, e142.
Ives AR (2015) For testing the significance of regression coefficients, go ahead and log-transform count data. Methods Ecol Evol 6, 828–835.
Ives AR, Garland T (2014) Phylogenetic regression for binary dependent variables. In: Modern phylogenetic comparative methods and their application in evolutionary biology (ed. Garamszegi LZ), pp. 231–261. Springer, Berlin, Heidelberg.
Kass RE, Caffo BS, Davidian M, Meng XL, Yu B, Reid N (2016) Ten simple rules for effective statistical practice. PLOS Comput Biol 12, e1004961.
Knief U, Schielzeth H, Backström N, Hemmrich-Stanisak G, Wittig M, Franke A, … Forstmeier W (2017) Association mapping of morphological traits in wild and captive zebra finches: reliable within, but not between populations. Mol Ecol 26, 1285–1305.
Komsta L, Novomestky F (2015) moments: Moments, cumulants, skewness, kurtosis and related tests. R package version 0.14.
Lin LI (1989) A concordance correlation-coefficient to evaluate reproducibility. Biometrics 45, 255–268.
Lumley T, Diehr P, Emerson S, Chen L (2002) The importance of the normality assumption in large public health data sets. Annu Rev Public Health 23, 151–169.
Mardia KV (1971) The effect of nonnormality on some multivariate tests and robustness to nonnormality in the linear model. Biometrika 58, 105–121.
McGuinness KA (2002) Of rowing boats, ocean liners and tests of the ANOVA homogeneity of variance assumption. Austral Ecol 27, 681–688.
Miller RG (1986) Beyond ANOVA: basics of applied statistics. John Wiley & Sons, Inc.
O'Hara RB (2009) How to make models add up—a primer on GLMMs. Ann Zool Fenn 46, 124–137.
O'Hara RB, Kotze DJ (2010) Do not log-transform count data. Methods Ecol Evol 1, 118–122.
Önöz B, Bayazit M (2012) Block bootstrap for Mann–Kendall trend test of serially dependent data. Hydrol Process 26, 3552–3560.
Open Science Collaboration (2015) Estimating the reproducibility of psychological science. Science 349, aac4716.
Osborne JW, Overbay A (2004) The power of outliers (and why researchers should ALWAYS check for them). Pract Assess Res Evaluation 9, art6.
Osborne JW, Waters E (2002) Four assumptions of multiple regression that researchers should always test. Pract Assess Res Evaluation 8, art2.
Pinheiro JC, Bates DM (2000) Mixed-effects models in S and S-PLUS. Springer.
Plaschke S, Bulla M, Cruz-López M, Gómez del Ángel S, Küpper C (2019) Nest initiation and flooding in response to season and semi-lunar spring tides in a ground-nesting shorebird. Front Zool 16, e15.
Puth MT, Neuhauser M, Ruxton GD (2014) Effective use of Pearson's product-moment correlation coefficient. Anim Behav 93, 183–189.
Qiu W (2018) powerMediation: Power/Sample Size Calculation for Mediation Analysis. R package version 0.2.9.
Quinn GP, Keough MJ (2002) Experimental design and data analysis for biologists. Cambridge University Press.
Ramsey F, Schafer DW (2013) The statistical sleuth: a course in methods of data analysis. Brooks/Cole.
Ruscio J, Kaczetow W (2008) Simulating multivariate nonnormal data using an iterative algorithm. Multivar Behav Res 43, 355–381.
Santema P, Schlicht E, Kempenaers B (2019) Testing the conditional cooperation model: what can we learn from parents taking turns when feeding offspring? Front Ecol Evol 7, e94.
Saravanan V, Berman GJ, Sober SJ (2020) Application of the hierarchical bootstrap to multi-level data in neuroscience. bioRxiv, e819334.
Schielzeth H, Dingemanse NJ, Nakagawa S, Westneat DF, Allegue H, Teplitsky C, … Araya-Ajoy YG (2020) Robustness of linear mixed-effects models to violations of distributional assumptions. Methods Ecol Evol 11, 1141–1152.
Schönbrodt F (2012) Ruscio - Code for generating correlating variables with arbitrary distributions. https://gist.github.com/nicebread/4045717.
Silberzahn R, Uhlmann EL, Martin DP, Anselmi P, Aust F, Awtrey E, … Nosek BA (2018) Many analysts, one data set: making transparent how variations in analytic choices affect results. Adv Methods Pract Psychol Sci 1, 337–356.
Simmons JP, Nelson LD, Simonsohn U (2011) False-positive psychology: undisclosed flexibility in data collection and analysis allows presenting anything as significant. Psychol Sci 22, 1359–1366.
Sokal RR, Rohlf FJ (1995) Biometry. W. H. Freeman.
Szöcs E, Schäfer RB (2015) Ecotoxicology is not normal. Environ Sci Pollut Res 22, 13990–13999.
Warton DI, Hui FKC (2011) The arcsine is asinine: the analysis of proportions in ecology. Ecology 92, 3–10.
Warton DI, Lyons M, Stoklosa J, Ives AR (2016) Three points to consider when choosing a LM or GLM test for count data. Methods Ecol Evol 7, 882–890.
Wedderburn RWM (1974) Quasi-likelihood functions, generalized linear models, and the Gauss-Newton method. Biometrika 61, 439–447.
White H (1980) A Heteroskedasticity-consistent covariance matrix estimator and a direct test for heteroskedasticity. Econometrica 48, 817–838.
Williams MN, Grajales CAG, Kurkiewicz D (2013) Assumptions of multiple regression: correcting two misconceptions. Pract Assess Res Evaluation 18, art11.
Young LJ, Campbell NL, Capuano GA (1999) Analysis of overdispersed count data from single-factor experiments: a comparative study. J Agric Biol Environ Stat 4, 258–275.
Zuur A, Ieno EN, Walker N, Saveliev AA, Smith GM (2009) Mixed effects models and extensions in ecology with R. Springer.
Zuur AF, Ieno EN, Elphick CS (2010) A protocol for data exploration to avoid common statistical problems. Methods Ecol Evol 1, 3–14.
Zuur AK, Ieno EN, Smith GM (2007) Analysing ecological data. Springer Science + Business Media, LLC.
Acknowledgements
Open Access funding enabled and organized by Projekt DEAL. We thank N. Altman, S. Nakagawa, M. Neuhäuser, F. Korner-Nievergelt and H. Schielzeth for helpful discussions and B. Kempenaers and J.B.W. Wolf for their support.
Author information
Authors and Affiliations
Contributions
W.F. and U.K. conceived of the study. U.K. wrote the simulation code. U.K. and W.F. prepared the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
ESM 1
(PDF 658 kb)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Knief, U., Forstmeier, W. Violating the normality assumption may be the lesser of two evils. Behav Res 53, 2576–2590 (2021). https://doi.org/10.3758/s13428-021-01587-5
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3758/s13428-021-01587-5