
Abstract
Dogs have not only shown different kinds of social learning, from either conspecifics or humans, including do-as-I-do imitation, deferred imitation, and selective imitation, but in two previous studies they have also shown an eagerness to copy causally irrelevant actions. This so-called overimitation is prevalent in humans but is totally absent in great apes. Whereas in one of two previous studies dogs copied actions from an experimenter (Johnston, Holden, & Santos in Developmental Science, 20, e12460, 2017), in the other a reasonable number of the dogs copied the irrelevant actions from their human caregiver (Huber, Popovová, Riener, Salobir, & Cimarelli in Learning & Behavior, 46, 387–397, 2018). Dogs have not only been domesticated to live and work with us, but many companion dogs develop strong affiliative relationships with their caregiver, which are akin to the attachment bonds between human children and their mother. We therefore assumed that overimitation in dogs might be strongly motivated by social factors, such as affiliation or conformity. To test this hypothesis, we confronted dogs with the same demonstration of causally relevant and irrelevant actions as in the previous study (Huber et al. in Learning & Behavior, 46, 387–397, 2018), but this time with an unfamiliar experimenter instead of the caregiver as the demonstrator. The results strongly supported our hypothesis: Whereas half of the subjects in the previous study replicated the causally irrelevant action demonstrated by their caregiver, only very few did so when the actions were demonstrated by the experimenter. We conclude that the eagerness of dogs to learn from humans and to copy even unnecessary actions is strongly facilitated by their relationship with the particular human.
Similar content being viewed by others


In a recent, highly debated review, Lea and Osthaus (2018) investigated whether the cognitive capacities of dogs are special. This formidable task was based on the question of whether dogs deviate from what one could expect them to show as a member of carnivorans, social hunters, or domestic animals. After comparing their cognitive abilities in the domains of sensory cognition, physical cognition, spatial cognition, social cognition, and self-awareness with selected members of these three groups, the somewhat surprising answer—at least to many dog owners and dog researchers—was that dog cognition does not appear to be exceptional; they exhibit what we would expect of cognition in a domesticated socially hunting carnivoran.
As Lea and Osthaus (2018) themselves admitted, their conclusion was based on what is currently known, not only about the cognitive abilities of dogs, but especially about the respective abilities of other carnivorans, social hunters, and domestic animals. In many cases we have a reasonably good understanding of dog cognition, due to an enormous number of experimental, well-controlled studies that have been conducted over the last two decades, but the same quantity of empirical evidence is lacking in most comparison groups, with the exception of primates. One domain where the comparison is uneven is social learning. Whereas dogs have been tested in almost all forms of social learning, including local enhancement (e.g., Mersmann, Tomasello, Call, Kaminski, & Taborsky, 2011), stimulus enhancement (e.g., Kubinyi, Topál, Miklósi, & Csányi, 2003), emulation (e.g., Miller, Rayburn-Reeves, & Zentall, 2009), motor imitation (e.g., Huber et al., 2009), selective imitation (Range, Viranyi, & Huber, 2007), and deferred imitation (e.g., Fugazza & Miklósi, 2014), we found a similar coverage only in (some) primates, mainly chimpanzees (see Whiten, 2017, for a review). Lea and Osthaus (2018) mentioned only studies with wolves, spotted hyenas, lions, sea lions, pigs, goats, and bottlenose dolphins, and mostly investigations of only one form of social learning. Nevertheless, they acknowledged that dogs have impressive capacities for social learning.
One example—for which so far, beyond humans, only canides and great apes have been tested—is “overimitation,” the copying of unnecessary or causally irrelevant actions (Lyons, Young, & Keil, 2007). Here we find a huge difference. At least until other species have been tested as well, canines seem to be exceptional, in that they show a qualitative, not only a quantitative, difference. Whereas so far not a single chimpanzee (Horner & Whiten, 2005), orangutan (Nielsen & Susianto, 2010), or bonobo (Clay & Tennie, 2018) has shown even a tendency to copy the demonstrator’s actions that are not necessary to achieve a goal (but see Russon & Galdikas, 1995, and Myowa-Yamakoshi, & Matsuzawa, 2000, for anecdotal reports of orangutans and chimpanzees copying unnecessary actions—not, however, in the context of overimitation studies), dogs and dingoes did so (Huber, Popovová, Riener, Salobir, & Cimarelli, 2018; Johnston, Holden, & Santos, 2017). Until these studies, it was therefore claimed that bodily overimitation—at least in high frequencies—is a uniquely human capacity, which likely plays a key role in explaining why human culture can accumulate over time (Clay & Tennie, 2018).
Overimitation in humans is a well-studied phenomenon, with a rapidly growing number of studies addressing this seemingly irrational behavior, especially in children (for a review of more than 50 studies, see Hoehl et al., 2019). When human children observe an adult inefficiently operating a novel object, they frequently and persistently reproduce the adult’s unnecessary actions. For example, after observing an experimenter retrieving a dinosaur from a plastic jar by first tapping the side of the jar with a feather and then unscrewing the lid, they repeated both actions (Lyons et al., 2007). Originally it had been assumed that humans overimitate not for deep cognitive reasons, but simply to satisfy social motivations, as a purely social exercise (Meltzoff, 2007; Nielsen, 2006; Tomasello, Carpenter, Call, Behne, & Moll, 2005). Especially in children, overimitation may serve primarily social functions, such as to affiliate with the model or “be like the other” (Keupp, Behne, & Rakoczy, 2013; Nielsen, 2006). Later, some researchers suggested an alternative explanation, by assuming that overimitation has cognitive and normative functions. When children observe an adult intentionally acting on a novel object, they may encode all of the adult’s actions as being causally meaningful (Lyons, Damrosch, Lin, Macris, & Keil, 2011). According to this account, the distortion of the children’s causal belief is regarded as the true cause of overimitation.
After the complete lack of evidence for overimitation in great apes, it was quite surprising to find dogs and dingoes copying not only the functional action to open a puzzle—namely, opening a lid to retrieve a treat from inside—but also a nonfunctional, causally irrelevant action—namely, moving a toy extending from the puzzle, which had no functional relevance (Johnston et al., 2017). In the first trial, after the action had been demonstrated three times by the human experimenter, about 70% of dogs and dingoes manipulated the lever. However, the dingoes used the lever less frequently than dogs did, suggesting that dingoes were more likely to ignore the irrelevant lever. Still, with altogether more than two thirds of all subjects showing the behavior—in dogs, actually three quarters—these two members of the genus Canis showed an impressive initial likeliness to copy the causally irrelevant action, rather like human children, but unlike great apes. Interestingly, the authors of this study had not been convinced by these results, because the canines performed the irrelevant action less often in subsequent trials, suggesting that a small portion of the subjects learned about the ineffectiveness of the irrelevant action as they gained experience with the puzzle. Still, close to 60% of the subjects showed overimitation in the second trial, and close to 50% in the fourth and last trial. Thus, either these subjects failed to learn from experience or they still had reasons to copy the irrelevant action. The fact that a minority of subjects (about 20%) omitted the irrelevant action after a few trials might hint at a difference from human children, but it cannot be cited as clear evidence against overimitation, as Johnston and colleagues concluded.
One problem with this overimitation test in dogs and dingoes might have been the close spatial and temporal connection between the two actions. The dog toy extending from the puzzle box looked like a lever, which is often used as a manipulandum. It is therefore reasonable to assume that dogs and dingoes might have misconceived this lever as being causally relevant, even more so because it was part of the apparatus. Furthermore, the dogs and dingoes might have used sticks and branches to play with and to retrieve, so this object might have had an inherent attractiveness for the dogs, and maybe also for some dingoes. We therefore changed the nature of the irrelevant action, in an attempt to further investigate overimitation in dogs (Huber et al., 2018). Instead of the movement of a manipulandum, the irrelevant action was touching of colored dots on the wall with the nose. These dots on paper sheets were mounted at a far distance (130 cm) from the sliding door that blocked the access to a treat. Touching the paper sheet had no effect—not even a slight displacement, like the lever—and it was also temporally disconnected from the relevant action. These differences from the lever of the puzzle box made the irrelevant action much less vulnerable to a causal misinterpretation. Still, half the dogs replicated the causally irrelevant action of nose touching (Huber et al., 2018).
Apart from the difference in the nature of the irrelevant action, another major difference between the two studies of overimitation in dogs was the nature of the demonstrator. Whereas in Johnston et al. (2017) the actions had been demonstrated by an experimenter, it was the dogs’ human caregiver who performed the actions in Huber et al. (2018). Still, even in Johnston et al.’s study, the demonstrator had been made familiar to the subjects prior to testing. Whereas the dingoes spent two weeks prior to the testing getting familiarized with the experimenter through proximity and feeding, the dogs visited the center at least once before testing. In addition, all of the subjects received four warm-up trials in which the experimenter fed the subjects. Therefore, the experimenter was not only known to the subjects, but also tried to create a positive relationship with them. The fact that even half of the dogs in Huber et al. (2018) copied the action that was very obviously not necessary for getting the treat led these authors to suggest a social rather than a cognitive explanation. Dogs have been domesticated with the main aim of working with or for humans, and thereby have acquired a special sensitivity to human gestures, speech, and behavior (Miklósi & Topál, 2013). This kind of phylogenetic enculturation over thousands of years is continued and amplified in the course of the lifespan, as companion dogs collect an enormous amount of experience during their life with humans (Topál & Gácsi, 2012; Topál, Miklósi, Csányi, & Dóka, 1998; Udell & Wynne, 2008). A prominent example of how well dogs understand humans and how eager they are to cooperate is the behavior of assistance dogs, especially for leading blind people (Naderi, Miklósi, Dóka, & Csányi, 2001). In the latter case, information is not only provided but also accepted by both parties in the course of their joint actions.
Previous investigations of social learning in dogs revealed that these animals not only benefit from having the opportunity to learn from humans, they actually learn something relevant. For instance, they learn to make a detour to find food (Pongrácz et al., 2001), learn how to manipulate objects (Kubinyi et al., 2003; Pongrácz, Bánhegyi, & Miklósi, 2012), and even match the direction of door-pushing (Miller et al., 2009). In addition, they are able to anticipate the owner’s action, and as a result they synchronize their behavior with that of their owners (Duranton, Bedossa, & Gaunet, 2017; Kubinyi et al., 2003). Altogether, dogs have shown impressive skills at demonstrator-matching behavior after observing a human.
It seems that dogs’ ability to cooperate with, and to learn from, humans is closely related to their affiliative (e.g., Topál et al., 1998) and communicative (e.g., Miklósi, Polgárdi, Topál, & Csányi, 1998) behaviors toward humans. Like children, they attend more to those familiar humans with whom they also had a close relationship (Horn, Range, & Huber, 2013); they are especially sensitive to ostensive cues (Kubinyi et al., 2003; Téglás, Gergely, Kupán, Miklósi, & Topál, 2012; Topál, Gergely, Erdőhegyi, Csibra, & Miklósi, 2009; Wallis et al., 2015); and, perhaps most importantly for the question of overimitation, they often interpret a test situation as a form of communication or social game (Soproni, Miklósi, Topál, & Csányi, 2001). In humans, the faithful copying of causally irrelevant actions (overimitation) is strongly motivated by social factors, such as to affiliate with or “be like the other” (Keupp et al., 2013; Nielsen, 2006). Therefore, Huber et al. (2018) hypothesized that dogs would also be more likely to copy irrelevant actions if shown the actions by the affiliated caregiver rather than by an unfamiliar person. However, without a proper control, this proposal remained speculative.
The present study, therefore, was a follow-up of the previous one, with the aim to investigate the effect of the demonstrator’s relationship to the dog. We faithfully replicated the former experiment, by using the same objects in the same testing room, showing the same irrelevant action (touching color dos on a sheet of paper) and the same relevant action (pushing a sliding door to the side to provide access to the food), using the same video coding and data analysis methods, and testing the same number of dogs (N = 60) in the same conditions (between-subjects design, four groups: irrelevant > relevant, relevant > irrelevant, only relevant, only irrelevant). We only substituted an unfamiliar person for the dog owners as the demonstrator, and we tested new dogs. Following our hypothesis, we predicted a measurable decrease in the number of dogs that would replicate the irrelevant action.
Method
Ethics statement
This study and all its procedures were discussed and approved by the ethics committee of the University of Veterinary Medicine Vienna, in accordance with the guidelines of good scientific practice and national legislation (Ref. 03/08/2017). All dog owners volunteered to participate with their dogs in this study and gave written consent. The experimental procedure was purely noninvasive, and handling of the dogs was always in a positive and pleasant manner.
Subjects
We asked the owners of 60 family pet dogs (30 males, 30 females) of varying breeds (except very small breeds), ranging in age from 13 months to 12 years (Mage: 5.6 years), to bring their pets to the Clever Dog Lab Vienna, to give written consent, and to provide the necessary information about their dogs (keeping conditions, training history, earlier participation in Clever Dog Lab studies, etc.). As in Huber et al. (2018), the dogs were divided into four equally sized (each N = 15) groups, with counterbalanced sex, age, training history, and breed composition. Still, some breeds are overrepresented, especially Australian Shepards and Border Collies, but this was true for the first study (Huber et al., 2018) as well. It is possible that, rather than the breed itself, dogs of breeds selected to work in contact with humans behave differently from dogs of independent working breeds. However, the grouping of breeds based on their “working role” can be problematic for a number of reasons, and it is not always clear on what basis a breed should be considered a “cooperative worker” (Passalacqua et al., 2011). For instance, Wobber et al. (2009) described sled dogs as a cooperative working breed, whereas Gácsi, McGreevy, Kara, and Miklósi (2009) included them in the independent working breeds. Furthermore, almost half of our dog sample was composed of mixed breeds. The individual characteristics of those dogs, including their training history (such as target training at home or touch-screen or eye-tracking training in the Clever Dog Lab) are provided in Table S1 of the supplementary material.
Experimental setup
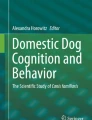
The dogs were tested in a midsized room (6.0 × 3.3 m) at the Clever Dog Lab Vienna, which was equipped with three video surveillance cameras to record the experimental trials. As the target of the relevant action, we used a rectangular sliding door (10 × 9 cm) covering a food receptacle (6 × 7 cm) with a skewed floor, which could be filled with a piece of sausage. The sliding door was mounted onto a white wooden plate (150 × 100 cm) that was positioned on the left side of one long side wall of the testing room and could be moved an equal distance (9 cm) to the left or right (Fig. 1; see also Figs. 1 and 2 in Huber et al., 2018). Movement of the sliding door was facilitated by a brown wooden handle (4 cm long, 2-cm diameter).

Snapshot of a testing situation, showing the dog subject sitting next to the caregiver and watching the demonstration by the experimenter. The experimenter is approaching the wall with the color dots; on the left side of the picture is the wall with the sliding door (see the Method section). The white and blue lines have been superimposed on the videos for better behavior coding, but they were not seen by the dogs
On the right side of the same wall, but 130 cm away from the sliding door and also 50 cm above the floor, we glued two A4-sized (30 × 20 cm) sheets of paper with centrally located, printed color dots (9 cm in diagonal; one blue, the other yellow, distance between the centers 60 cm) onto a white, laminated poster sheet (172 × 106 cm). The color dots were used as the targets of the irrelevant action. To prevent any scent transmission, the laminated poster sheet was cleaned before each test and the A4 sheets with color markers were renewed for each dog.
The observation and starting position for the dogs was on the opposite sides of the wall, approximately 260 cm away from the sliding door and 210 cm away from the paper sheets (see Fig. 1 in Huber et al., 2018). A chair was provided for the dog’s owner to sit in while holding the dog on short leash during the demonstration phase (Fig. 1).
Design and procedure
Before the experiment, the owners were asked to sit quietly on a chair that was placed next to the observer position while holding the dog during the demonstration, to release the dog from the leash when commanded by the experimenter, and to refrain from interacting or communicating with the dog during the test. To avoid Clever Hans effects, we kept the owners uninformed about the aim and hypotheses of the study and what we predicted the dogs would do. Because, in contrast to Huber et al. (2018), one of the authors (K.S.) rather than the dog owner served as the demonstrator, it was not necessary to instruct the owners about the actions to be demonstrated.
At the beginning of each trial, the experimenter took a position to the left of the owner and waited to begin the demonstration until the dog was sitting quietly. Then she gave the dog a treat, to gain the dog’s attention, and started with the demonstration. Importantly, to enable the dogs to imitate her behavior, she demonstrated both actions in a dog-like manner, moving to the target objects on hands and knees and performing the target actions with the nose. The relevant action consisted of moving the sliding door leftward with the nose, and the irrelevant action was touching the color dots—first the blue and then the yellow dot—with the nose. The relevant action was followed by a visibly rewarding event; the experimenter took the piece of sausage and showed it to the dog. Afterward, she turned to the sliding door, covered it with her body and put the treat, invisibly to the dog, back into the food chamber.
The four groups differed in the number and the sequence of actions demonstrated to them. As in Huber et al. (2018), two groups saw only one of the two actions demonstrated—group REL saw the causally relevant action, and group IRR saw the irrelevant action—in order to assess the baseline probabilities of copying these actions. The two other groups saw both actions demonstrated in immediate succession—one group in the usual overimitation sequence (IRR + REL; Horner & Whiten, 2005; Johnston et al., 2017), and the other in the reverse order (REL + IRR), to control for sequence effects such as primacy or recency effects (Murdock, 1962). The one-action demonstrations lasted for approximately 10–20 s, and the demonstration of both actions lasted for approximately 30–50 s. Immediately after the experimenter had returned to the starting position next to the owner, the dog was released from the leash by the owner, and the test started. The test ended after 60 s, and the owner called the dog back.
Data analysis
Three digital video cameras connected to a video-recording station outside the test room were used to videotape the dogs’ behavior. They were positioned as to allow the recording of the most relevant details of the dogs’ behavior, namely the manipulation of the sliding door and the touching of the color dots. For data analysis the three independent video streams had been merged and then used for coding with the behavior coding software Solomon coder beta (© 2015 by András Péter). To determine whether dogs approached the target objects, we drew two rectangles, each with its long side approximately 1 m distant from the wall (see Fig. 1), and defined approach as stepping into the rectangle with at least two feet.
The most relevant data from the tests were those derived from the behavior with respect to copying of the irrelevant action. We classified the copying behavior into four degrees of copying fidelity, from lowest to highest (see Table 1): 0 for not touching the paper sheets with the dots at all; 1 for touching one color dot; 2 for touching both color dots, but in the reverse order as being demonstrated or with a break in-between and leaving the wall; and 3 for touching both color dots in immediate succession and in the demonstrated order.
Applying the same logic, we also coded the copying of the relevant action: 0 for not touching the sliding door; 1 for touching the sliding door or the handle but not moving it; 2 for pushing the door sideward, but in the other direction as being demonstrated; and 3 for pushing the door sideward in the demonstrated direction.
When we combined the two actions, we classified as 1 approaching both areas; 2 touching/manipulating the target objects (dots, sliding door); 3 showing the correct actions, but in the reverse order as being demonstrated; and 4 copying exactly what has been demonstrated.
We estimated the extents to which the level of copying accuracy of the irrelevant actions was influenced by condition (factor with levels IRR, IRR + REL, REL, REL + IRR) and demonstrator (owner vs. stranger) by using an ordered multinomial regression. We used a model with four levels of copying accuracy (0, 1, 2, and 3). In the model, we also included the two-way interaction between condition and demonstrator, because we anticipated that the dogs tested with the owner as demonstrator (in Huber et al., 2018) would be more likely to copy the irrelevant action than the dogs tested with the experimenter as demonstrator in all conditions in which irrelevant actions were demonstrated. However, in the condition in which only relevant actions were demonstrated (condition REL), we expected both groups of dogs to be equally unlikely to copy irrelevant actions.
Since the ages of the dogs tested in the experiment varied considerably, we also included age and age squared in the model, to control for age effects and account for the possibility that copying accuracy might peak at intermediate ages. As an overall test of the effects of condition, demonstrator, and their interaction, and to avoid cryptic multiple testing (Forstmeier & Schielzeth, 2011), we compared this full model with a null model including only age and age squared.
It seemed possible that the propensity to overimitate might vary among dog breeds. However, since 46 out of 120 dogs (both studies combined) were mixes of different breeds (which would have to be excluded from the analysis), and since more than half of the breeds in the data were represented by only a single individual, we could not put breed into the model. Instead, we classified breeds into “cooperative” and “independent,” “mix,” and “ambiguous,” according to the literature (Gácsi et al., 2009; Passalacqua et al., 2011; Wobber et al., 2009). We then considered only individuals of cooperative and independent breeds and tested whether these differed with regard to whether they touched at least one of the two dots on the wall with their nose using Fisher’s exact test.
It also seemed possible that the dogs that had been tested previously in tasks in which touching objects with the nose was rewarded would be more prone to touch the dots on the wall in the present experiment. However, since the model already was fairly complex, and even more so if we considered the limited number of individuals who touched at least one of the two dots on the wall, we did not address this question in the model we fitted. Instead, using Fisher’s exact test we compared the numbers of individuals who did or did not touch at least one of the two dots between individuals that had or had not been tested in touchscreen tasks previously, and also between individuals that had or had not been trained touching other objects with their nose (target training).
We fitted the model in R (version 3.6.1; R Core Team, 2019) using the polr function in the package MASS (version 7.3-51.4; Venables & Ripley, 2002). Prior to fitting the model, we z-transformed age to a mean of zero and a standard deviation of one, to achieve more easily interpretable estimates (Schielzeth, 2010). We estimated model stability by removing individual cases (i.e., dogs) one at a time, fitting the model to the subsets of data, and then comparing the estimates obtained for the subset with those obtained for the full data sets. This revealed most of the model estimates to be of acceptable stability (see the Results section). We bootstrapped the model coefficients and fitted values (see below) by means of a nonparametric bootstrap (N = 1,000 bootstraps) using random sampling (with replacement) of the individual dogs. We obtained fitted values in terms of the average response by first determining the probabilities of each of the four levels of copying accuracy (using the function predict), separately for each combination of levels of condition and demonstrator. We then determined the weighted average of the copying accuracy per each of the combinations of levels of condition and demonstrator whereby we weighted by their fitted probabilities of occurrence. We utilized a likelihood ratio test (Dobson, 2002) for the full null model comparison as well as for determining the significance of individual effects (which we determined by comparing likelihoods of a model comprising and one not comprising the effect in question). It is worth noting that the model seemingly suffered from complete separation (Field, 2005), as indicated by a few very large absolute estimates with even larger standard errors that obviously arose from dogs tested with the stranger in the condition with only relevant actions (REL), which did not show a single case of copying the irrelevant actions. However, this did not hamper inference about the relevance of the terms in the model and the directions of effects (positive or negative), but the precise values of the individual estimates were meaningless in such a case and were associated with huge uncertainty. The sample for this model comprised a total of 120 experiments.
Interobserver reliability
The experimenter (K.S.) coded all 60 videos, and one additional coder, unaware of the aim of the study and the hypotheses, coded a random subsample (N = 15, 25%) of the videos. This naive coder could only see the behavior of the dogs, because the demonstration by the experimenter was digitally removed. The agreement between the two coders was very high (for all variables, Cronbach’s alpha > .85).
Results
Overall, we found that half of all dogs tested (N = 60) were interested in the wall with the food chamber, as determined by stepping with at least two feet into the area marked with white lines (Fig. 1). Altogether, 30 dogs approached the wall with the sliding door and sniffed there. This is comparable to the frequency in the previous study (39 dogs in Huber et al., 2018; Fisher’s exact test, p = .139). In contrast, when we counted the number of dogs that approached the wall with the color dots (by having at least two paws inside the blue lines on the floor), only 12 did so, which was much fewer than in the previous study (28 dogs in Huber et al., 2018; Fisher’s exact test, p = .002).
To determine the probabilities of copying the irrelevant or relevant action demonstrated, we counted in each case the number of dogs that showed one of the four behaviors that we classified according to copying fidelity (see Table 1). For comparison, these numbers were also calculated for the dogs of the previous study (Huber et al., 2018). In addition, we also counted the number of dogs in both studies that copied either one or both actions.
According to our main hypothesis about the lowering of the dogs’ tendency to copy irrelevant actions when the actions were demonstrated by an unfamiliar person instead of their caregiver, we estimated the extent to which the level of copying accuracy of irrelevant actions was influenced by demonstrator (owner vs. stranger) and also by condition (factor with levels REL, IRR, IRR + REL, REL + IRR), using an ordered multinomial regression. Overall, the full null model comparison revealed a clearly significant result (χ2 = 28.115, df = 7, p < .001). The interaction between condition and demonstrator did not reveal significance (χ2 = 1.689, df = 3, p = .639; Table 2), and hence we dropped it from the model. In the resulting reduced model, we found clearly significant results for the effects of both condition and demonstrator (Table 3). More specifically, the copying accuracy for irrelevant actions was generally higher when tested with the owner as compared to the stranger, and was low when only relevant actions were demonstrated, as compared to when irrelevant actions were only or also demonstrated (Fig. 2).

Copying accuracy of irrelevant actions, separately for each of the combinations of condition and demonstrator. The area of each symbol depicts the number dogs per combination of condition and demonstrator (range: 1 to 15) for each value of copying accuracy, and the horizontal lines with error bars show the fitted average response and its confidence interval (obtained from the reduced model lacking the interaction between condition and demonstrator)
Regarding the control predictor of age, we found a weak tendency for age squared to reveal a positive effect, meaning that young and old dogs tended to show higher copying accuracy than did the dogs of intermediate age. However, the effect was only marginally nonsignificant, and only so in the reduced model, so it should be interpreted with caution.
With regard to the grouping of breeds based on their “working role,” we found that 15 out of 49 individuals (31%) of cooperative breeds, and five of 21 individuals (24%) of independent breeds, touched at least one of the colored dots on the wall, which did not reveal a significant difference (p = .77). Regarding preexperience with touching tasks (touchscreen experience and target training), we found no significant differences in the percentages of individuals that touched at least one of the two dots (Fisher’s exact test: for previous experience with touching targets, no = 16, yes = 56, p = .15; for previous experience with touchscreens, no = 27, yes = 25, p = .44). Hence, it is unlikely that differences between breeds or previous testing experience biased or distorted the results of the model.
Discussion
The results of this study lend support to our hypothesis that the tendency of dogs to copy nonfunctional actions is influenced by the relationship with the demonstrator. In a previous study (Huber et al., 2018), about half of the subjects (22 out of 45) who saw their caregiver performing a nonfunctional action—touching color dots on a wall—did so as well, at least partially (either one or both dots). We hypothesized that this overimitation effect was facilitated by the affiliative relationship between the human demonstrator and the imitating dog, satisfying social motivations. The present study put this hypothesis to the test by changing the demonstrator but otherwise replicating the experiment precisely. This time an experimenter, who was unfamiliar to the subjects, demonstrated the actions. As expected, this changed the willingness of dogs to copy the irrelevant action. In fact, only eight of the 45 dogs that had seen the irrelevant action demonstrated—and none from the group REL—touched one of the dots, and not a single dog touched both color dots. This is in sharp contrast to the previous study, with the caregiver as demonstrator, in which 11 dogs touched one dot, and another 11 dogs touched both dots (Huber et al., 2018).
Importantly, this difference cannot be explained by a general unwillingness to follow the experimenter’s behavior. Altogether, 36 of those 45 dogs that saw the sliding door opening approached it, and of those, 27 dogs touched the sliding door in front of the food chamber (or its handle or the wall close by), and of those, 11 dogs succeeded in opening the door and getting the treat. This is a number similar to the one from the previous study, in which 37 dogs approached and 31 dogs touched the sliding door or its handle, and of those, 15 dogs opened the sliding door. Thus, the change of the demonstrator only affected the copying of the irrelevant action, but not the motivation to manipulate the object that blocked the access to food. Because only eight dogs replicated the demonstrator’s actions precisely, the mechanism behind it was more likely stimulus enhancement or emulation rather than imitation. We therefore conclude that pet dogs overimitate selectively, by copying nonfunctional actions mainly when demonstrated by their caregiver, but preferring a direct route to food when not.
One argument against this selective-overimitation hypothesis may be raised by referring to the results of Johnston et al. (2017), which revealed a similarly strong overimitation effect despite using an experimenter as demonstrator. However, two features of this study are weakening the argument. First, the close spatial and temporal connection between the functional lid and the nonfunctional dog toy, and the attractiveness of a dog toy to play with, might have increased the likeliness of the dogs and dingoes to touch and manipulate it. A control condition with a demonstration of the relevant action only would be necessary to test this. Secondly, the demonstrating experimenter created a positive relationship to the subjects prior to testing by feeding them. This raises the question of whether the selective overimitation effect would have emerged also in a setting with a spatially and temporarily disconnected, causally irrelevant action like in the present study.
For humans, especially children, it has been proposed that overimitation emerges as a means to promote affiliation with the demonstrator (Meltzoff, 2007; Nielsen, 2006; Nielsen & Blank, 2011; Over & Carpenter, 2013). Furthermore, children may interpret actions shown by adults as social conventions or norms that should be copied, because children insist that such action have to be done (Kenward, Karlsson, & Persson, 2011). Without the possibility to ask the dogs why they copy a causally disconnected action, we cannot interpret their motivation in the same way as with children. Still, it is highly plausible to suggest that social motivations are also relevant here, rather than a confusion about or reinterpretation of causality (Lyons et al., 2007).
When facing the human partner, pet dogs may repeat her or his actions either because they want to please the caregiver or because they are inclined to obey by following tacit commands. Although these possibilities sound like mutually exclusive alternatives for why dogs overimitate, in fact they are linked. After two decades of studying the human–dog relationship, dog researchers agree that the relationship between companion dogs and their human caregivers bears a remarkable resemblance to an infant attachment bond (Archer, 1997; Gácsi, Miklósi, Dóka, & Csányi, 2001; Hare & Tomasello, 2005; Prato-Previde, Custance, Spiezio, & Sabatini, 2003; Prato-Previde & Valsecchi, 2014; Topál et al., 1998). Not only is there evidence that this affiliative bond enables dogs to engage their caregiver’s caregiving system, but also that it changes the way the dog explores objects and performs in cognitive tasks (Horn, Range, & Huber, 2013; Horn, Virányi, Miklósi, Huber, & Range, 2012). The strong influence of the affiliative relationship is further supported by the fact that dogs pay more attention to the actions of their owners than to the actions of other familiar humans (Horn et al., 2013). On top of this affiliative motive, the behavior of dogs vis-à-vis their caregiver is also determined by educational and normative influences. In the human household, humans educate the dog what to do and what not to do, involving actions that are far from causally transparent, and may be purely arbitrary or conventional. Dogs are trained in many different ways and for many different reasons, including agility training, obedience training, and other forms of special-purpose trainings, in which a precise following of the trainer’s behavior is the rule (Clark & Boyer, 1993). The link between the human–dog relationship and the dog’s education is confirmed by the fact that reward-based training improves a dog’s subsequent ability to learn (Rooney & Cowan, 2011).
Future research could examine whether dogs selectively imitate some family members over others, or whether they imitate unknown humans who attempt to develop a relationship with them first. If dogs only overimitate their trainer, the capacity could be a result of the training relationship, which could make it a different phenomenon from what we see with overimitation in children, who will imitate a variety of models, including unknown researchers. However, children will not generalize to all models, such as out-group models, as Buttelmann, Zmyj, Daum, and Carpenter (2013) found. The question that arises is how selective social learning is among dogs as compared to humans.
It will be another worthwhile task in the future to use further controls or new experimental designs to disentangle the possible reasons for the dog’s motivation to copy actions that are spatially distant and causally disconnected from a second, immediately following action with an obvious function (making food available). In addition to controlling for the influence of the demonstrator’s presence during the time when the dog is supposed to copy the before-shown actions, further attempts to investigate the dogs’ understanding of the actions in terms of their functionality or goal directedness seem to us particularly rewarding. Furthermore, in future studies it would be advantageous to use more humans as unfamiliar experimenters, in that here we used only a single unfamiliar experimenter, and as a consequence cannot determine to what extent the result we found was influenced by particular properties of the experimenter. Finally, it would be interesting to test wolves, both human-raised and parent-raised, as well as parent-raised and pack-living dogs. These comparisons would be especially informative with respect to the question of whether phylogeny (domestication) or ontogeny (raising) has a greater influence on the copying of human actions, especially nonfunctional ones. Recently it has been shown that human-raised wolves outperform companion dogs as well as dogs raised as packs in their ability to follow causal cues, suggesting phylogenetic influences, but that all three groups performed similarly in following the communicative and behavioral cues of a familiar experimenter, suggesting that domestication has not altered how dogs use human-given cues (Lampe, Bräuer, Kaminski, & Virányi, 2017). However, the results of our two overimitation studies in pet dogs have revealed more than a canine sensitivity to human behavior, but even a particular eagerness to copy the behavior of their caregiver, even if the behavior has no obvious functionality.
References
Archer, J. (1997) Why do people love their pets? Evolution and Human Behavior, 18, 237–259.
Buttelmann, D., Zmyj, N., Daum, M., & Carpenter, M. (2013). Selective imitation of in-group over out-group members in 14-month-old infants. Child Development, 84, 422–428.
Clark, G. I., & Boyer, W. N. (1993). The effects of dog obedience training and behavioural counselling upon the human–canine relationship. Applied Animal Behaviour Science, 37, 147–159.
Clay, Z., & Tennie, C. (2018). Is overimitation a uniquely human phenomenon? insights from human children as compared to bonobos. Child Development, 89, 1535–1544. https://doi.org/10.1111/cdev.12857
Dobson, A. J. (2002). An introduction to generalized linear models. Boca Raton, FL: Chapman & Hall/CRC.
Duranton, C., Bedossa, T., & Gaunet, F. (2017). Interspecific behavioural synchronization: Dogs present locomotor synchrony with humans. Scientific Reports, 7, 12384.
Field, A. (2005). Discovering statistics using SPSS. London, UK: Sage.
Forstmeier, W., & Schielzeth, H. (2011). Cryptic multiple hypotheses testing in linear models: overestimated effect sizes and the winner’s curse. Behavioral Ecology and Sociobiology, 65, 47–55.
Fugazza, C., & Miklósi, Á. (2014). Deferred imitation and declarative memory in domestic dogs. Animal Cognition, 17, 237–247.
Gácsi, M., McGreevy, P., Kara, E., & Miklósi, Á. (2009). Effects of selection for cooperation and attention in dogs. Behavioral and Brain Functions, 5, 31. https://doi.org/10.1186/1744-9081-5-31
Gácsi, M., Miklósi, A., Dóka, A., & Csányi, V. (2001). Attachment behavior of adult dogs (Canis familiaris) living at rescue centers: Forming new bonds. Journal of Comparative Psychology, 115, 423–431.
Hare, B., & Tomasello, M. (2005). Human-like social skills in dogs? Trends in Cognitive Sciences, 9, 439–444.
Hoehl, S., Keupp, S., Schleihauf, H., McGuigan, N., Buttelmann, D., & Whiten, A. (2019). “Over-imitation”: A review and appraisal of a decade of research. Developmental Review, 51, 90–108.
Horn, L., Range, F., & Huber, L. (2013). Dogs’ attention towards humans depends on their relationship, not only on social familiarity. Animal Cognition, 16, 435–443.
Horn, L., Virányi, Z., Miklósi, Á., Huber, L., & Range, F. (2012). Domestic dogs (Canis familiaris) flexibly adjust their human-directed behavior to the actions of their human partners in a problem situation. Animal Cognition, 15, 57–71.
Horner, V., & Whiten, A. (2005). Causal knowledge and imitation/emulation switching in chimpanzees (Pan troglodytes) and children (Homo sapiens). Animal Cognition, 8, 164–181.
Huber, L., Popovová, N., Riener, S., Salobir, K., & Cimarelli, G. (2018). Would dogs copy irrelevant actions from their human caregiver? Learning & Behavior, 46, 387–397.
Huber, L., Range, F., Voelkl, B., Szucsich, A., Virányi, Z., & Miklósi, Á. (2009). The evolution of imitation: What do the capacities of non-human animals tell us about the mechanisms of imitation? Philosophical Transactions of the Royal Society B, 364, 2299–2309.
Johnston, A. M., Holden, P. C., & Santos, L. R. (2017). Exploring the evolutionary origins of overimitation: A comparison across domesticated and non-domesticated canids. Developmental Science, 20, e12460.
Kenward, B., Karlsson, M., & Persson, J. (2011). Over-imitation is better explained by norm learning than by distorted causal learning. Proceedings of the Royal Society B, 278, 1239–1246.
Keupp, S., Behne, T., & Rakoczy, H. (2013). Why do children overimitate? Normativity is crucial. Journal of Experimental Child Psychology, 116, 392–406.
Kubinyi, E., Topál, J., Miklósi, Á., & Csányi, V. (2003). Dogs (Canis familiaris) learn from their owners via observation in a manipulation task. Journal of Comparative Psychology, 117, 156–165.
Lampe, M., Bräuer, J., Kaminski, J., & Virányi, Z. (2017). The effects of domestication and ontogeny on cognition in dogs and wolves. Scientific Reports, 7, 11690.
Lea, S. E., & Osthaus, B. (2018). In what sense are dogs special? Canine cognition in comparative context. Learning & Behavior, 46, 335–363.
Lyons, D. E., Damrosch, D. H., Lin, J. K., Macris, D. M., & Keil, F. C. (2011). The scope and limits of overimitation in the transmission of artefact culture. Philosophical Transactions of the Royal Society B, 366, 1158–1167.
Lyons, D. E., Young, A. G., & Keil, F. C. (2007). The hidden structure of overimitation. Proceedings of the National Academy of Sciences, 104, 19751–19756.
Meltzoff, A. N. (2007). “Like me”: A foundation for social cognition. Developmental Science, 10, 126–134.
Mersmann, D., Tomasello, M., Call, J., Kaminski, J., & Taborsky, M. (2011). Simple mechanisms can explain social learning in domestic dogs (Canis familiaris). Ethology, 117, 675–690.
Miller, H. C., Rayburn-Reeves, R., & Zentall, T. R. (2009). Imitation and emulation by dogs using a bidirectional control procedure. Behavioural Processes, 80, 109–114.
Miklósi, Á., & Topál, J. (2013). What does it take to become “best friends”? Evolutionary changes in canine social competence. Trends in Cognitive Sciences, 17, 287–294.
Miklósi, A., Polgárdi, R., Topál, J., & Csányi, V. (1998). Use of experimenter-given cues in dogs. Animal Cognition, 1, 113–121.
Myowa-Yamakoshi, M., & Matsuzawa, T. (2000). Imitation of intentional manipulatory actions in chimpanzees (Pan troglodytes). Journal of Comparative Psychology, 114, 381–391.
Murdock, B. B., Jr. (1962). The serial position effect of free recall. Journal of Experimental Psychology, 64, 482–488. https://doi.org/10.1037/h0045106
Naderi, S., Miklósi, Á., Dóka, Á., & Csányi, V. (2001). Co-operative interactions between blind persons and their dogs. Applied Animal Behaviour Science, 74, 59–80.
Nielsen, M. (2006). Copying actions and copying outcomes: Social learning through the second year. Developmental Psychology, 42, 555–565.
Nielsen, M., & Blank, C. (2011). Imitation in young children: When who gets copied is more important than what gets copied. Developmental Psychology, 47, 1050–1053.
Nielsen, M., & Susianto, E. W. (2010). Failure to find over-imitation in captive orangutans (Pongo pygmaeus): Implications for our understanding of cross-generation information transfer. In J. Hakansson (Ed.), Developmental psychology (pp. 153–167). New York, NY: Nova Science.
Over, H., & Carpenter, M. (2013). The social side of imitation. Child Development Perspectives, 7, 6–11.
Passalacqua, C., Marshall-Pescini, S., Barnard, S., Lakatos, G., Valsecchi, P., & Previde, E. P. (2011). Human-directed gazing behaviour in puppies and adult dogs, Canis lupus familiaris. Animal Behaviour, 82, 1043–1050.
Pongrácz, P., Bánhegyi, P., & Miklósi, Á. (2012). When rank counts—Dominant dogs learn better from a human demonstrator in a two-action test. Behaviour, 149, 111–132.
Pongrácz, P., Miklósi, Á., Kubinyi, E., Gurobi, K., Topál, J., & Csányi, V. (2001). Social learning in dogs: The effect of a human demonstrator on the performance of dogs in a detour task. Animal Behaviour, 62, 1109–1117.
Prato-Previde, E., Custance, D., Spiezio, C., & Sabatini, F. (2003). Is the dog–human relationship an attachment bond? An observational study using Ainsworth’s strange situation. Behaviour, 140, 225–254. https://doi.org/10.1163/156853903321671514
Prato-Previde, E., & Valsecchi, P. (2014). The immaterial cord: The dog–human attachment bond. In J. Kaminski & S. Marshall-Pescini (Eds.), The social dog (pp. 165–189). San Diego, CA: Academic Press.
R Core Team. (2019). R: A language and environment for statistical computing. Vienna, Austria: R Foundation for Statistical Computing.
Range, F., Viranyi, Z., & Huber, L. (2007). Selective imitation in domestic dogs. Current Biology, 17, 868–872. https://doi.org/10.1016/j.cub.2007.04.026
Rooney, N. J., & Cowan, S. (2011). Training methods and owner–dog interactions: Links with dog behaviour and learning ability. Applied Animal Behaviour Science, 13, 169–177.
Russon, A., & Galdikas, B. (1995). Imitation in free-ranging rehabilitant orangutans. Journal of Comparative Psychology, 107, 147–161.
Schielzeth, H. (2010). Simple means to improve the interpretability of regression coefficients. Methods in Ecology and Evolution, 1, 103–113. https://doi.org/10.1111/j.2041-210X.2010.00012.x
Soproni, K., Miklósi, A., Topál, J., & Csányi, V. (2001). Comprehension of human communicative signs in pet dogs (Canis familiaris). Journal of Comparative Psychology, 115, 122–126.
Téglás, E., Gergely, A., Kupán, K., Miklósi, Á., & Topál, J. (2012). Dogs’ gaze following is tuned to human communicative signals. Current Biology, 22, 209–212. https://doi.org/10.1016/j.cub.2011.12.018
Tomasello, M., Carpenter, M., Call, J., Behne, T., & Moll, H. (2005). Understanding and sharing intentions: The origins of cultural cognition. Behavioral and Brain Sciences, 28, 675–691, disc. 691–735. https://doi.org/10.1017/S0140525X05000129
Topál, J., & Gácsi, M. (2012). Lessons we should learn from our unique relationship with dogs: an ethological approach. In L. Birke & J. Hockenhull (Eds.), Crossing boundaries (pp. 163–187). San Diego, CA: Academic Press.
Topál, J., Gergely, G., Erdőhegyi, Á., Csibra, G., & Miklósi, Á. (2009). Differential sensitivity to human communication in dogs, wolves, and human infants. Science, 325, 1269–1272.
Topál, J., Miklósi, A., Csányi, V., & Dóka, A. (1998). Attachment behavior in dogs (Canis familiaris): A new application of Ainsworth’s (1969) Strange Situation Test. Journal of Comparative Psychology, 112, 219–229.
Udell, M. A., & Wynne, C. D. (2008). A review of domestic dogs’ (Canis familiaris) human-like behaviors: Or why behavior analysts should stop worrying and love their dogs. Journal of the Experimental Analysis of Behavior, 89, 247–261.
Venables, W. N., & Ripley, B. D. (2002). Modern applied statistics with S (4th ed.). New York, NY: Springer.
Wallis, L. J., Range, F., Müller, C. A., Serisier, S., Huber, L., & Virányi, Z. (2015). Training for eye contact modulates gaze following in dogs. Animal Behaviour, 106, 27–35.
Whiten, A. (2017). Social learning and culture in child and chimpanzee. Annual Review of Psychology, 68, 129–154.
Wobber, V., Hare, B., Koler-Matznick, J., Wrangham, R., & Tomasello, M. (2009). Breed differences in domestic dogs’ (Canis familiaris) comprehension of human communicative signals. Interactions Studies, 10, 206–224.
Acknowledgments
The authors thank K. Bayer for help with recruitment of the dogs, W. Berger for building the apparatus, P. Füreder for video merging and other technical support, and the dog owners for volunteering in the study.
Open Practices Statement
The data are available at Github: https://github.com/LudwigHuber/Overimitation.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Table S1
(DOCX 24 kb)
Rights and permissions
About this article

Cite this article
Huber, L., Salobir, K., Mundry, R. et al. Selective overimitation in dogs. Learn Behav 48, 113–123 (2020). https://doi.org/10.3758/s13420-019-00400-w
Published:
Issue Date:
DOI: https://doi.org/10.3758/s13420-019-00400-w