
Abstract
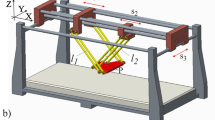
A new machine tool with parallel kinematic structure and a special Hooke’s joint of increased rigidity is described. The static rigidity of the machine tool is simulated. Nonuniformity of the rigidity distribution at characteristic points of the working space is analyzed with different directions of the cutting force.
Similar content being viewed by others

References
Gutyrya, S. and Yaglinskiy, V., Mechanisms of parallel structures in the modern engineering industry, Technol. Compl. (Ukraine), 2010, no. 2, pp. 25–35.
Pandilov, Z. and Rall, K., Parallel kinematics machine tools: history, present, future, Mech. Eng., 2006, vol. 25, no. 1, pp. 3–20.
Index Traub, V100. http://www.index-werke.de/de/englisch/546_ENG_HTML.htm. Cited February 24, 2014.
Serkov, N.A., Vainshtein, I.V., Merzlyakov, A.A., and Sirotkin, R.O., The results of experimental studies of the mechanism of parallel structure by the example of the “Hexamer-1” machine, Vestn. Nauchno-Tekh. Razvit., 2008, no. 5 (9), pp. 67–88.
PKMtricept catalogue of products. http://www.pkmtricept. com/files/catalogo_en.pdf. Cited April 2, 2014.
Enikeev,B.A., Yusupov,A.F., and Akmaev,O.K., RF Patent 2542878, 2010.
Molnár, L., Váradi, K., Bódai, G., Zwierczyk, P., and Oroszváry, L., Simplied modeling for needle roller bearings to analyze engineering structures by FEM, Period. Polytech., Mech. Eng., 2010, vol. 1 (54), pp. 27–33.
Dürschmied, F., Assemblies for parallel kinematics, Werkstatt Betr., 1999, vol. 132, no. 5.
Profile rail guides LLR. http://www.skf.com/binary/93-22627/6229EN-profile-rail-guides.pdf.
Dadalau, A., Groh, K., Reu, M., and Verl, A., Modeling linear guide systems with CoFEM: equivalent models for rolling contact, Prod. Eng., 2012, vol. 6, no. 1.
Zhang, J., Zhao, Y., and Jin, Y., Kinetostatic-modelbased stiffness analysis of exechon PKM, Rob. Comput.-Integr. Manuf., 2016, vol. 37, pp. 208–220 doi 10.1016/j.rcim.2015.04.008
Author information
Authors and Affiliations
Corresponding author
Additional information
Original Russian Text © O.K. Akmaev, B.A. Enikeev, A.I. Nigmatullin, 2015, published in STIN, 2015, No. 11, pp. 8–12.
About this article

Cite this article
Akmaev, O.K., Enikeev, B.A. & Nigmatullin, A.I. A new machine tool with parallel kinematic structure. Russ. Engin. Res. 36, 484–487 (2016). https://doi.org/10.3103/S1068798X16060046
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1068798X16060046