
Abstract
Specific power, defined as the ratio of output power to total mass, is one of the generally accepted figures of merit for electrical machines. Given the growing interest in electric aircraft, developers are trying to demonstrate a high value of this indicator for their products. This paper provides an overview of the projects of electrical machines with high power density, the use of which is promising in aircraft of various dimensions. Projects of the University of Nottingham, the University of Illinois, Siemens, Yasa, and others were considered. An analysis of their technical and technological characteristics and approaches to design, manufacturing, and testing is given.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Urban aeromobility is a trend for modern megacities. The concept of urban aeromobility is currently implemented only on the basis of helicopters in some major cities, such as Paris, London, New York, Dubai, Sao Paulo, and Mexico City [1]. However, in order to reduce financial cost and energy consumption and other resources required for the maintenance of manned vehicles, as well as to reduce atmospheric and noise pollution while ensuring the rapid movement of passengers through the air, a new type of air transport—electric aircraft (EA) of vertical take-off and landing (eVTOL), performing the function of an air cab—is proposed. Currently, it is planned to implement the concept of urban air mobility system jointly by Yandex Taxi LLC and BP-Technology (JSC Russian Helicopters) with the prospect of replacing helicopters with electric unmanned air cabs. In addition, by 2025, at the initiative of ANO Aeronet Analytical Center, JSC Sukhoi Civil Aircraft (SCAC), and PJSC Ilyushin Aviation Complex, it is proposed to launch a new model of autonomous air transport [2, 3]. The main element of the new aircraft meeting the needs of the concept of urban aeromobility is the power installation, which can be hybrid or all-electric. The growing interest in such vehicles initiates proposals in the field of electric-propulsion systems (EPSs). In this regard, developers of various aircraft systems are showing increased interest in electric machines with high power density [4–10]. To satisfy this interest, the developers of electric motors and generators seek to demonstrate the high specific power of the developed products; however, in many cases, these statements are of advertising character and much of what is really important in the development of devices and systems remains behind the scenes. The question arises of whether it is possible in practice to achieve high figures of specific power that have been declared theoretically. This paper analyzes designs of electric machines with high power density; experimental developments of the Universities of Nottingham and Illinois, Siemens, etc. are reviewed. Particular interest is presented by mass-produced electric machines for EPSs [11–13]. Unfortunately, very little information is presented in the literature about commercial machines for aircraft EPSs, such as YASA, Magnix, and Emrax. However, their operation as parts of various machines is the best proof of the need for a comprehensive analysis of device parameters in terms of their applicability as part of a particular system, rather than evaluating only one indicator (specific power, specific torque, specific mass).
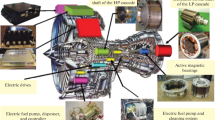
In [14], the development of a permanent-magnet (PM) generator at Nottingham University (United Kingdom) is reported with power of 4 MW and rotation frequency of 15 000 rpm for future hybrid aircraft. In general, the generator is a synchronous electric machine featuring a design of a rotor on which permanent magnets with eight different directions of magnetization (Fig. 1a) and a cooling system of the machine stator (Fig. 1b) are installed. A channel system of stator cooling is used: oil is supplied from machine butts pumped through slots and channels in the stator and coming out in the middle of the package. At the same time, the rotor remains dry, as it is separated by a glass–textolite sleeve. It is worth noting that it is technologically difficult to implement the chosen direction of magnetization of PM and ensure their correct assembly.

(a) Synchronous machine with a PM arranged as a Halbach magnetic system and (b) a scheme showing the path of coolant inside the generator.
From the data [14], it becomes clear that a high value of specific power was achieved through the use of multistep optimization of machine parameters, as well as intense cooling. The used optimization methods are known and applied everywhere and their adequacy is not in question; however, when considering the cooling system, it is worth paying attention to the declared coolant flow rate, which is up to 500 L/min. At the same time, it is indicated that the size of channels in the stator slots is about 3 mm. It is also indicated that the current density in the armature winding (AW) is 27.5 A/mm2, which corresponds to current-density values in aircraft generators with spray-oil cooling.
According to [14], the machine is assembled using a different magnet-core steel than what was intended. This was done in order to reduce the cost of the first sample. Figure 2 shows the assembled stator and generator on the test rig; it can be seen that the machine has a rather massive harness, which requires a large free external space. This may subsequently become a limitation when using it on site, and redesigning to make the lead wires more compact would result in increased weight.

(a) Stator assembly and (b) the generator prototype on the test setup.
A series of experiments were conducted to approbate the performance of the machine. The maximum speed during the tests was 7500 rpm. Thus, so far there is no information about the confirmation of the declared indicators of output and specific power.
In [15], a 15 000-rpm 1-MW motor for the aviation industry proposed by the University of Illinois for hybrid electric-aircraft applications is considered. The specific power of the motor can reach 15 kW/kg. The main idea of the proposed motor design is to reduce iron consumption by using a large number of poles, slotless windings, and the Halbach magnetic system. An inverted design is used in which the PMs are mounted on a titanium housing, which is additionally covered with carbon fiber (Fig. 3).

University of Illinois electric motor [12].
The machine has no ferromagnetic sections of the magnetic circuit, which accounts for low total losses (17.2–28.2 kW) [16]; it is noted that self-venting is used to cool the machine. However, in [17], it is indicated that the current density of windings is 18 А/mm2, which corresponds to intense oil cooling. In this regard, overheating of the windings and failure of the machine is possible.
In [15], the influence of different geometrical parameters on specific power was investigated. This made it possible to determine the most appropriate dimensions of the machine. According to the results of the study, the outer diameter was 0.318 m and the active length of the machine was 0.2295 m. Thus, the linear speed of the rotor reaches 264.8 m/s, which is the acceptable value for machines with a PM, however, it is necessary to note that, using a structure without ferromagnetic teeth, even in the presence of a magnetic stator yoke, does not allow high values of magnetic induction in an air gap to be obtained. Its value can be up to 0.5 Tesla. At the same time, in [17], it is indicated that the magnetic induction in the working gap is 0.95 Tesla. Taking into account the high rotational speed and the aforementioned diameter and length of the machine, to provide 1 MW of power, the linear load of the stator must be about 3466 A/cm at Bδ = 0.95 Tesla and 6585 A/cm at Bδ = 0.5 Tesla, which the second value seeming more feasible. This also appears to be consistent with a specified current density of 18 A/mm2; however, it is inconsistent with an air-cooled system.
The manufactured rotor and stator prototypes were tested on special facilities [17]. The maximum rotor speed in testing reached 18 000 rpm, which is 20% higher than the expected operating speed. The rotor did not fail during the experiments; however, at 15 000 rpm (nominal frequency), large vibrations were detected the cause of which was not clarified. When measuring the cooling flow, it turned out that it was not as large as predicted. The authors refer to the fact that the manufactured prototype is somewhat different from the real engine. However, this does not indicate that, in a real machine, the selected cooling system will be effective, as stated by the authors. Thus, the demonstrated samples more put into question the feasibility of the considered machine than confirm its performance.
In [18], the design of a synchronous motor with a PM of 300 kW with a speed of 3600 rpm for an airplane power plant is described. The specific power of the engine is 5 kW/kg, and the efficiency is 97% (Fig. 4). It should be noted that this work significantly repeats those previously considered, which is clearly seen when comparing Fig. 3 and 4; apparently, the 300-kW machine is a small-scale model, while the authors note that the number of the magnet segments, the magnet shape, and the cross section of stranded wire have been changed.

Design of University of Illinois synchronous motor [18].
When designing the motor, the outer diameter of the machine and the height of the PM were fixed at values of 0.37719 and 0.012 m, respectively. The authors note that the former is due to a maximum speed limitation (linear velocity of 70 m/s) and the latter is due to manufacturing constraints for the rare-earth material of the PM; however, an earlier 2017 article indicated that the linear velocity could exceed 200 m/s.
This machine also uses an air-cooling system. At a rated current of 245 A, the current density is 16.12 A/mm2. As was noted earlier, an intense oil-cooling system is appropriate at this current density; the efficiency and active mass of the base motor model are 97.25% and 54 kg.
The machine has been modified to use an array of four magnet segments of rectangular magnetization with a rotation of 45°. It is worth noting that it is technologically extremely difficult to ensure the chosen direction of magnetization.
Judging by the information in [18], the motor was assembled and sent for testing; however, there is no information about the results of the tests. This leaves questions as to what purpose this motor was designed for.
Innovative Power Solutions (United States) announced in the mid-2000s the development of a 1‑MW light onboard generator [19, 20]. To reduce the size of the generator, an efficient rotor-cooling system with cooling plates was used [21].
A megawatt onboard generator [22] is a synchronous generator with an explicit-pole rotor (electromagnetic excitation) and a distributed armature winding (Fig. 5, 6). According to Innovative Power Solutions (IPS), the generator weighs about 210 kg. The diameter is 0.406 m, and the length is 0.559 m. The current density in the excitation winding is increased to about 22 A/mm2, and the specific power is 4.8 kW/kg. It is indicated that the generator is high-speed; however, there is no information about the speed. At the same time, in materials devoted to this development, we could not find data on the overload capacity of the generator, as well as on the dimensions and parameters of its excitation system.

Design of rotor poles and winding: (1) pole core, (2) pole shoe, (3) excitation winding, (4) identical elements of cooling plate, (5) cooling-plate passages, (6) V-shaped wedge, and (7) top wedge [21].

Rotor of a 1-MW IPS generator with a cooling system [24].
The authors note that it was possible to achieve high output and specific power due to the use of a new patented method of cooling the poles and rotor conductors [21]. This method uses cooling plates located between the rotor-pole cores and excitation coils. Each cold plate serves to dissipate heat from both the pole core and the field coil. The cooling medium enters the rotor through the shaft and is distributed between the cooling plates, passes along the rotor, returns to the shaft, and is routed to the heat sink.
While oil-spray technology provides a higher current density than the proposed design, its advantage is that the working fluid is in a closed contour and out of contact with any electrical part. This method of cooling eliminated any possibility of oil entering the air gap, but sacrificed the higher heat-transfer coefficients offered by spray cooling and, consequently, increased weight or reduced electrical loads. In addition, the cooling plates have their own electrical-insulation layer, which also creates additional thermal resistance [23].
Little information has been provided about the method of cooling the stator. In particular, it is said about placement of fans on the rotor and creation of special case design, including ribs for intensification of cooling during blowing [19], that air cooling of machine stator is suggested, which causes small electromagnetic loads, which will not allow a specific power to be provided that is greater than that of existing aircraft generators with oil cooling.
Thus, the proposed project of a 1-MW aircraft generator can be called interesting, but, however, uncompetitive and unrealistic. In addition, there is no information on whether this project has been implemented, although in 2006 the company IPS stated that it was finalizing the development of the generator and looking for customers. It is likely that the unreasonableness of the stated parameters of the generator has been a significant obstacle to its implementation and deployment.
In 2011, the company Electrodynamics Associates Inc. (United States) demonstrated a synchronous generator of 2.5 MW, 15 000 rpm, and 1500 Hz with oil cooling of the stator and rotor, a generator efficiency of 95%, and the generator operating in the intermittent mode [22].
The dimensions of the generator are a length of 0.343 m, width of 0.559 m, and height of 0.456 m. The mass of the generator when using aluminum as a housing material is 177 kg, and when using magnesium it is 150 kg. The bandage of the rotor is made of inconel, which is a nickel–chromium heat-resistant alloy. The Russian analogue of inconel is the KhN60VT heat-resistant alloy operating at temperatures up to 1000°C; the material density is 8800 kg/m3 [25].
The generator is an explicit-pole synchronous machine with a built-in exciter in the rotor. The machine works with an operating cycle of switching on and off of 6 and 12 min. The peak power density in this operating mode is 14.1 kW/kg for the aluminum case and 16.7 kW/kg for the magnesium case.
The rotor windings are cooled by oil spraying with a current density of 30 A/mm2, an oil flow rate of 115.5 L/min, and an oil inlet temperature of 65.5°C. For comparison, [14] considers an engine of a similar class, however, with a coolant flow rate of 500 L/min. Given the high power of the generator and the high current density of the windings, it can be assumed that the excitation current of the main stage is also significant, which leaves questions open about the diodes used in the rotating rectifier.
This generator developed for aerospace applications is presented on the official website of the company [26]. It is noted that the generator design can be scaled from 1 to 5 MW; however, unfortunately, there are no data on experimental studies of this machine.
H3X Technologies (United States) announced the creation of the HPDM-250 superefficient electric motor with small dimensions (Fig. 7). The new design’s power per kilogram of weight exceeds that of existing engines by three times and involves significant weight savings for aircraft manufacturers. According to the developers’ statement the new system will be suitable for the realization of electric planes, as well as for the air taxi.

Design of HPDM-250 engine.
The HPDM-250 motor combines a synchronous electric motor with PM excitation and an inverter; it can also be completed with a gearbox [27]. The developer’s website states that, with a supply voltage of 800 V, the output torque of the motor remains unchanged and at a frequency of 20 000 rpm is 95 N m, which corresponds to a power of 200 kW. However, if we recalculate the power to a frequency of 2000 rpm (corresponding to the speed of the propeller), the output power is only 20 kW. To connect the high-speed motor with the propeller, the developers suggest using a built-in planetary reducer, which weighs 3 kg at a gear ratio of 4. However, it is impossible to estimate how realizable such a reducer is by reference to the data presented on the website. However, even if the reducer is used, at 2000 rpm the output power would be 79 kW and the specific power would be 4.75 kW/kg if the reducer actually weighs 3 kg.
The obvious advantage of this development is the integration of all three devices into a single housing. In this case, it is possible to increase the specific power for the entire system, not just the electric motor, which is ultimately the goal of development of an electric-propulsion system.
The HPDM-250 motor uses a single cooling system for the power electronics and the electric motor. The refrigerant used is ethylene glycol (Water Ethylene Glycol), an oily liquid combined with water, with a relatively high flow rate of 15 to 30 L/min; the implementation of the cooling system is not detailed.
The design of the electric-motor stator coils is interesting. According to the developers, they are made by 3D printing, which allows increasing the current density and filling factor of the coil. The use of pure copper 3D-printing technology allows more cooling of the housing and the use of nonstandard internal geometry; so, the motor, gearbox, and power-electronics devices can be installed in the best place inside the housing. It is worth noting, however, that advanced techniques, such as 3D pure copper printing, have a number of drawbacks. These include the very high cost of technology and materials, as well as difficulties in scaling the results. In addition, the technology of additive manufacturing of copper windings still needs to be tested and confirmed to affirm that they feature benefits and reliability.
A prototype HPDM-250 motor was piloted in 2022. As a result of the tests, 70% of the nominal phase current was reached. The motor and inverter components were within their thermal limits, and the measured temperature values agreed well with the thermal models; however, no information on full-scale tests has yet been provided.
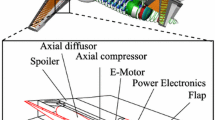
In 2015, the German company Siemens introduced the SP260D aircraft AC motor, which develops 260 kW of power at a weight of 50 kg. The motor reaches a maximum speed of 2500 rpm, which allows the propeller to be mounted directly on its shaft without the need for an intermediate gearbox. The continuous torque is 1000 N m, the specific power of the engine is 5.2 kW/kg, the efficiency is 95% [28], the axial length of the engine is 300 mm, and the outer diameter is 418 mm.
The developers managed to achieve high values of specific power by combining intense cooling and a high degree of integration of the engine and propeller. Developers have also managed to reduce the weight of some structural elements by optimizing their structure taking into account perceived loads; for example, they developed a complex computer model of the end shield, which is an example of topological optimization of design (Fig. 8). The next step is to introduce a composite shield, which will reduce the weight by another half [29].

Step-by-step optimization of SP260D engine face shield.
Inside the motor, the PMs of the rotor are combined in a Halbach array, which creates a stronger magnetic field with less material. The stator is made of a lightweight iron–cobalt alloy. The motor windings are surrounded by a special coolant that conducts heat, but not electricity. There are also cooling inlets; the oil inlet temperature is 90°C, and so the motor can be used with a relatively small heat exchanger. The motor has two independent three-phase windings. If one of them fails, the motor can operate at about 60% of its capacity, which makes it highly resistant to accidents.
The declared characteristics of the engine were approbated in 2017 on the Extra 330LE prototype aircraft, which was also built by Siemens. The electric motor provided power equal to 260 kW. Information on autonomous testing of the SP260D engine (Fig. 9) has not been made public.

SP260D motor design.
The British company YASA developed synchronous motors with excitation using PMs and YASA P400 and YASA 750 axial flow series (Fig. 10). The motors have direct oil cooling. They are also distinguished by an absence of a stator magnetic core and identical stator-winding coils, which provides high manufacturability and low cost in serial production. The technical characteristics are presented in Table 1.

YASA motor diagram.
The duration of peak power for both machines is not specified. It can be seen that the continuous specific power for both machines does not exceed 5 kW/kg and, at 3250 rpm, is 1.89 kW/kg; however, the manufacturer’s website indicates that several solutions for cars have been successfully implemented. In addition, the YASA P400 electric motor is used to power the Rolls Royce Spirit of Innovation, which made its first flight in 2021 and has already set several records [11, 12]. This example confirms that a high power density is not the only indicator of whether an electric motor will be used on board or not. Much more importance is represented by the possibility of integration into the vehicle and the mass–size characteristics of the whole EPS including the electric motor, the converter, and the power source.
EMRAX Innovative E-motors (Slovenia) has developed a line of synchronous motors with PM and axial magnetic flux. This paper discusses the EMRAX 208 and EMRAX 228 electric motors. The motor rotor is designed as a rotating body connected to the front flange of the motor. The stator is connected to the rear flange of the motor through which the electrical terminals of the stator winding and the liquid-cooling pipes are led out. The stator cooling can be air, liquid, or a combination of both. However, no information is given as to the differences between liquid and combined cooling systems. The coolant flow rate is 8 L/min. The technical specifications of the engines are given in Table 2.
The power output of the motors achievable with each type of cooling is not specified. It is a special feature of the EMRAX Innovative E-motors that they can be stacked. In other words, two motors can be connected together to double the power. This is probably why the company claims that their electric motors can reach a specific power of up to 10 kW/kg.
Bench tests of EMRAX 208 and 228 electric motors with combined cooling system were carried out on the basis of Bauman Moscow State Technical University in Moscow [30]. The research was carried out on an EMRAX 208 electric motor in the speed control mode. An EMRAX 228 electric motor was used as a load machine. The tests resulted in measured mechanical characteristics and dependences of power and efficiency on the rotational speed at load from 25 to 125% of the nominal value.
As a result of the tests, it was registered that the torque on the shaft was higher than the rated continuous torque specified by the manufacturer. The power on the motor shaft recorded as a result of bench tests also exceeds the continuous power given in the manufacturer’s technical data. Therefore, as a result of the tests, the characteristics of the EMRAX 208 electric motor, as declared by the manufacturer of the equipment, have been confirmed; i.e., the declared values of specific power have been experimentally confirmed.
The Magni350 and Magni650 electric propulsion systems that were offered by MagniX (United States) are another ambitious project. These propulsion systems include an electric motor and an electronic controller. The Magni350 has a power output of 350 kW and weighs 111.5 kg, and the Magni650 has a power output of 640 kW and weighs 200 kg; the units run from 1200 to 2300 rpm. The specific power of the machines is 3.1 and 3.2 kW/kg, respectively. The systems have intensive liquid cooling. The low speed is due to the direct propeller drive, which allowed doing without use of mechanical transmission. The motors use two or four three-phase windings, which provide increased reliability in the case of failure; several separate motor regulators are used, which also increase the degree of interchangeability (Fig. 11). For example, in the event of a short circuit, one three-phase section can be switched off; however, the pilot will still have 50% of full power available in the Magni350 and 75% of full power in the Magni650 [31].

Magni650 electric-propulsion system.
The Magnix propulsion systems have been tested on the Cesna eCaravan aircraft, which is the best proof of the performance, reliability, and output characteristics of these propulsion systems [13].
CONCLUSIONS
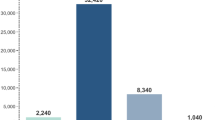
(1) Specific power defined as the ratio of output power to total mass is one of the common comparative indicators for electrical machines. Developers try to demonstrate a high value of this indicator; however, most often they provide the value of specific power for the peak mode, the duration of which is in the range from several seconds to several minutes. The specific power of prototypes manufactured and used in industry is 3–5 kW/kg. Electrical machines with a specific power of more than 7–8 kW/kg are considered either from a theoretical point of view or are supported by experimental data of the prototype, which do not confirm the claimed characteristics of the machine.
(2) For electric machines the main application of which is electric propulsion, a specific power in the continuous mode of 3–4 kW/kg at a rotational frequency of 2000–4000 rpm is average for the current level of technology. The indicator of 5 kW/kg is the maximum achieved for a prototype. The increase of this parameter is motivated by necessity of development and introduction of new technologies of electric machines in production with increased electromagnetic loads and decreased assembly weight. For example, increasing the specific power of an EPS is possible with a higher degree of integration of its elements and the use of new technological approaches, such as topological optimization, composite technology, and additive technology.
(3) Some of the systems considered in the article do not have high values of specific power; however, they are already used in various devices. This confirms that high power density is not the only indicator of whether an electric motor will be used on board or not. The ability to integrate the entire EPS, including the electric motor, converter, and power source, into the apparatus, along with its mass–size characteristics, is much more important. In a number of cases, this requires revising the requirements for both the machine and the system as a whole.
Change history
10 February 2023
An Erratum to this paper has been published: https://doi.org/10.3103/S1068371223330015
REFERENCES
Urban air mobility, Wikipedia. https://en.wikipedia.org/wiki/Urban_Air_Mobility.
Russian Helicopters and Yandex Taxi agreed on creation of urban air taxi system, Forbes. https://www.forbes.ru/tehnologii/382601-vertolety-rossii-i-yandekstaksi-dogovorilis-o-sozdanii-gorodskoy-sistemy-aerotaksi
Posypkina, A. and Sidorkova, I., Aeronet decided to assemble a consortium for creating unmanned air taxi, RBC, 2019. https://www.rbc.ru/technology_and_media/01/08/2019/5d41bff99a794723709633fc
Eryilmaz, I., Li, H., Pachidis, V., Laskaridis, P., Zhu, Z.-Q., and Jewell, G.W., Performance and operability of an electrically driven propulsor, Int. J. Engine Res., 2022. https://doi.org/10.1177/14680874211066396
Malkin, P. and Pagonis, M., Superconducting electric power systems for hybrid electric aircraft, Aircr. Eng. Aerosp. Technol., 2014, vol. 86, no. 6, pp. 515–518. https://doi.org/10.1108/AEAT-05-2014-0065
Haran, K.S., Kalsi, S., Arndt, T., Karmaker, H., Badcock, R., Buckley, B., Haugan, T., Izumi, M., Loder, D., Bray, J.W., Masson, P., and Stautner, E.W., High power density superconducting rotating machines—Development status and technology roadmap, Supercond. Sci. Technol., 2017, vol. 30, no. 12, p. 123002. https://doi.org/10.1088/1361-6668/aa833e
Rendón, M.A., Sánchez, R.C.D., Gallo, M.J., and Anzai, A.H., Aircraft hybrid-electric propulsion: development trends, challenges and opportunities, J. Control, Autom. Electr. Syst., 2021, vol. 32, no. 5, pp. 1244–1268. https://doi.org/10.1007/s40313-021-00740-x
Kovalev, K., Kaderov, V., Ivanov, N., Malevich, N., and Zhechihin, B., Electrical Machines with Superconducting Windings at 20 K, IEEE 14th Workshop on Low Temperature Electronics (WOLTE), Matera, Italy, 2021, IEEE, 2021, pp. 1–4. https://doi.org/10.1109/WOLTE49037.2021.9555456
Ivanov, N., Shirokov, A., Zhuravlev, S., and Zdorova, M., Research of electric power quality indicators at the design stage of an aircraft synchronous generator, 2021 Int. Conf. on Electrotechnical Complexes and Systems (ICOECS), Ufa, 2021, IEEE, 2021, pp. 329–334. https://doi.org/10.1109/ICOECS52783.2021.9657422
Lisovin, I., Ekimov, S., Ismagilov, F., Vavilov, V., Gusakov, D., Bekuzin, V., and Miniyarov, A., Development of a 250 kW electric power generation system for a more electric aircraft, Int. Rev. Electr. Eng., 2021, vol. 16, no. 4, pp. 316–327. https://doi.org/10.15866/iree.v16i4.19410
https://motor.ru/news/rollsfly-22-11-2021.html.
Mercedes-Benz and YASA – sparking the electric revolution with Axial Flux Motors, YouTube. https://www.youtube.com/watch?v=iKN7CLb63ZI
Garrett-Glaser, B., First flight of MagniX eCaravan showcases maturity of electric aviation, Aviation Today, 2020. https://www.aviationtoday.com/2020/05/29/ historic-flight-of-magnixs-ecaravan-showcases-maturity-of-electric-aviation/
Golovanov, D., Gerada, D., Sala, G., Degano, M., Trentin, A., Connor, P.H., Xu, Z., La Rocca, A., Galassini, A., Tarisciotti, L., Eastwick, C.N., Pickering, S.J., Wheeler, P., Clare, J., Filipenko, M., and Gerada, C., 4-MW class high-power-density generator for future hybrid-electric aircraft, IEEE Trans. Transp. Electrif., 2021, vol. 7, no. 4, pp. 2952–2964. https://doi.org/10.1109/TTE.2021.3068928
Yi, X., Yoon, A., and Haran, K.S., Multi-physics optimization for high-frequency air-core permanent-magnet motor of aircraft application, 2017 IEEE Int. Electric Machines and Drives Conference (IEMDC), Miami, Fla., 2017, IEEE, 2017, pp. 1–8. https://doi.org/10.1109/IEMDC.2017.8002293
Yoon, A., Yi, X., Martin, J., Chen, Yu., and Haran, K., A high-speed, high-frequency, air-core PM machine for aircraft application, 2016 IEEE Power and Energy Conf. at Illinois (PECI), Urbana, Ill., 2016, IEEE 2016, pp. 1–4. https://doi.org/10.1109/PECI.2016.7459221
Sanchez, R., Development of a high power density rotor, Master Thesis, Urbana, Ill.: Univ. of Illinois at Urbana-Champaign, 2017.
Lee, D., Balachandran, Th., Salk, N., Schuh, J., Yoon, A., Xiao, P., Yu, Ya., Lin, Sh., Powell, P., and Haran, K.K., Design and prototype of a high power density slotless PMSM for direct drive aircraft propulsion, 2021 IEEE Power and Energy Conf. at Illinois (PECI), Urbana, Ill., 2021, IEEE, 2021, pp. 1–6. https://doi.org/10.1109/PECI51586.2021.9435256
Felton, M., Megawatt generator addresses space and electricity needs for next generation of commercial and military aircrafts, TechUpdate Q. Newsletter MDA Technol. Transfer, 2006, summer.
Flying megawatts, Aviation Week Space Technol., 2006, no. 11.
Liebermann, E., Rotor cooling arrangement, US Patent, no. 6661133, 2003.
Gieras, J.F., Multimegawatt synchronous generators for airborne applications: A review, 2013 Int. Electric Machines & Drives Conf., Chicago, 2013, IEEE, 2013, pp. 626–633. https://doi.org/10.1109/IEMDC.2013.6556160
Brandon, S., Simulation of heat/mass transfer of a three-layer impingement/effusion cooling system, Master Thesis, Orlando, Fla.: Univ. of Central Florida, 2012. http://purl.fcla.edu/fcla/etd/CFE0004795.
Scherzinger, W.M., Chu, T., and Kasdan, L.M., Liquid cooled salient pole rotor support wedges, US Patent no. 4943746, 1990.
KhN60VT. https://metcontinent.ru/gosttu/materialyi/stal,-splav-zharoprochnyie/splav-zharoprochnyij/xn60vt.html.
https://electrodynamics.net/products/.
H3X: Electric aircraft propulsion. https://www.h3x.tech/.
Lombardo, T., Inside Siemens’ record-breaking electric aircraft motor, engineering.com, 2016. https://www.engineering.com/story/inside-siemens-record-breaking-electric-aircraft-motor
Lombardo, T., Siemens electric aircraft propulsion unit: Inside the digital twin design strategy, engineering.com, 2018. https://www.engineering.com/story/siemens-electric-aircraft-propulsion-unit-inside-the-digital-twin-design-strategy.
Sarach, M.B., Sarach, E.B., and Zakharov, A.Yu., Bench testing of electric motors EMRAX 208, 228, Izv. MGTU MAMI, 2020, no. 1, pp. 80–87. doi https://doi.org/10.31992/2074-0530-2020-43-1-80-87
Service, magniX. https://www.magnix.aero/services.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
The author declares that he has no conflicts of interest.
Additional information
Translated by F. Baron
The original online version of this article was revised: Due to a retrospective Open Access order.
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Ivanov, N.S., Zhuravlev, S.V., Kharkina, O.A. et al. Electric Machines with High Specific Power. Russ. Electr. Engin. 93, 621–630 (2022). https://doi.org/10.3103/S1068371222100054
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1068371222100054