
Abstract
This paper is devoted to study of increasing the wear resistance of a radial plain bearing. The operation of a bearing is considered in the hydrodynamic mode by means of application of an antifriction polymer composite coating with an axial groove and the micropolar properties on a nonstandard bearing surface adapted to the friction conditions of a bearing bush. The effect of pressure and temperature in the turbulent friction mode on the rheological properties of the lubricant is taken into account. Based on the equation for the micropolar fluid flow in a “thin layer” as well as on the dependence of the micropolar lubricant on the pressure and temperature and on the continuity equation, a self-similar solution has been found taking into account the axial groove on the surface of a bearing bush and without taking into account the axial groove. As a result, the velocity and pressure fields in the axial groove and on the surface of a polymer antifriction composite coating have been determined as has the load capacity and friction force, which make it possible to increase the load capacity, reduce the friction coefficient (increase wear resistance), and also increase the duration of the hydrodynamic mode. The results of numerical analysis of theoretical models and experimental evaluation of the suggested design are presented to verify and confirm the efficiency of the models obtained.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
The use of modern high-tech lubricants is one of the key factors for reducing friction in the mating parts of triboassemblies and increasing the efficiency of tribosystems.
Continuous progress in the production of lubricants leads to complications in the development of mathematical models taking into account the thermal processes, the geometry of the reference node, and the totality of all acting loads.
The analysis of works [1–10] devoted to the effect of antifriction coatings on the thermal processes taking into account factors not previously taken into account shows the need to improve the existing calculation models, i.e., to take into account additional factors and changing the design of the base surface of a bearing bush to increase the duration of the hydrodynamic mode [11].
The purpose of this paper is to find the regularities for increasing the duration of the hydrodynamic mode of a radial plain bearing with an adapted supporting profile of the base surface covered by a polymer coating with an axial groove, taking into account the dependence of micropolar lubricant viscosity on the pressure and temperature.
FORMULATION OF THE PROBLEM
A model of the steady motion of a micropolar incompressible lubricant in the working gap of an infinite radial plain bearing is considered.
The shaft rotates with an angular velocity Ω, and the bearing bush is stationary. It is assumed that the space between the eccentrically located shaft and the bearing is completely filled with lubricant, and the bearing bush is coated with a polymer.
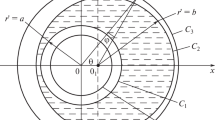
In the assumed arrangement of the polar coordinate system (Fig. 1), the equation of the shaft contour [12], the bearing bush under the coating with a noncircular profile of base surface, and the polymer coating that copies a noncircular bearing bush profile can be expressed by

Calculation diagram of the tribocontact.
Let us assume that the viscosity characteristics depend on the pressure according to the law
The initial basic equations taking into account Eq. (2) are dimensionless equations of motion of an incompressible fluid for a “thin layer” and a continuity equation with the corresponding boundary conditions
The pass to dimensionless quantities is carried out by the following relations
Taking into account the boundary conditions, let us find the self-similar solution of problem Eq. (3) in the form
By substituting Eq. (6) into Eq. (3) and taking into account the boundary conditions Eq. (4), we obtain the following system of equations:
System of equations (7) is solved under the following boundary conditions:
Taking into account boundary conditions (8) and integrating Eq. (7), we obtain as a result the expression
As follows from the equation \({{\tilde {u}}_{i}}\left( {{{\xi }_{i}}} \right) + {{\xi }_{i}}{\tilde {v}}_{i}^{'}\left( {{{\xi }_{i}}} \right) = 0\),
Based on the equality \(p\left( 0 \right) = p\left( {{{\theta }_{1}}} \right) = p\left( {{{\theta }_{2}}} \right) = p\left( {2\pi } \right) = \frac{{{{p}_{g}}}}{{p{\kern 1pt} \text{*}}}\), we obtain
where \({{\tilde {\eta }}_{1}} = \frac{{{{\eta }_{1}}}}{{1 - {{\eta }_{2}}}}\) and \(\tilde {\eta } = \frac{\eta }{{1 - {{\eta }_{2}}}}\).
The dimensionless hydrodynamic pressure in the lubricating layer is determined based on the equation
Let us differentiate the expression \(\mu = {{e}^{{\alpha p - \beta T}}}\) with respect to θ. Taking into account the increase in the temperature
we can obtain
By integrating these equations, we obtain
where \({{K}_{i}} = \frac{{24{{\mu }_{0}}\Omega {{r}_{0}}}}{{T{\kern 1pt} \text{*}{\kern 1pt} {{C}_{p}}{{\delta }^{2}}{{a}_{i}}}}\); \({{\Delta }_{1}} = \int_0^1 {{{{\left( {\tilde {\psi }{\kern 1pt} '{\kern 1pt} '\left( {{{\xi }_{i}}} \right)} \right)}}^{2}}d{{\xi }_{i}}} = \frac{{a_{i}^{2}}}{{12}}\); \({{\Delta }_{2}} = 2\int_0^1 {\left( {\tilde {\psi }{\kern 1pt} '{\kern 1pt} '\left( {{{\xi }_{i}}} \right) \cdot {\tilde {v}}{\kern 1pt} '\left( {{{\xi }_{i}}} \right)} \right)} d{{\xi }_{i}}\) = \(\frac{1}{6}{{b}_{i}}{{a}_{i}} = {{a}_{i}}\); Δ3 = \(\int_0^1 {{{{\left( {{\tilde {v}}{\kern 1pt} '\left( {{{\xi }_{i}}} \right)} \right)}}^{2}}} d{{\xi }_{i}}\) = 4; \({{I}_{{{{K}_{i}}}}} = \int_0^\theta {\frac{{d\theta }}{{h_{i}^{K}\left( \theta \right)}}} \).
By solving Eq. (13) with respect to μ(θ), with an accuracy of \(O({{\eta }^{2}})\), \(O(\eta _{1}^{2})\), \(O(\eta _{2}^{2})\), \(O({{\tilde {\eta }}^{2}})\), \(O\left( {\eta {{\eta }_{1}}} \right)\), \(O\left( {\eta \tilde {\eta }} \right)\), \(O\left( {{{\eta }_{2}}\eta } \right)\), and \(O\left( {{{\eta }_{2}}\tilde {\eta }} \right)\) inclusive, we obtain the analytical expressions for the hydrodynamic pressure
If the values of the hydrodynamic pressure and velocity are known, we can find the analytical expressions for the bearing capacity and friction force
The numerical analysis of the obtained computational models at a speed of 1 m/s; θ2 – θ1 = 5.74°–22.92°; σ = 5–25 MPa; μ0 = 0.0707–0.0076 N s/m2; Ω = 100–2400 s–1; α = 0–1; Т = 25–100°С; δ = 0.05–0.07 × 10–3 m; r0 = 0.01995–0.04993 m; Pg = 0.2 MPa, made it possible to plot the curves of the friction coefficient (Fig. 2) when using a micropolar lubricant.

Dependence of the friction coefficient in the bearing with a groove on the parameters characterizing (a) the lubricant viscosity and temperature or (b) the groove width.
The numerical analysis of the expression that determines the magnitude of the vertical pressure component made it possible to plot the dependence of the accepted variable factors on this parameter (Fig. 3).

Dependence of the pressure component in the bearing with an adapted profile and a groove on the groove width and working load: 1, σ = 14.1 MPa; 2, σ = 4.7 MPa.
Thus, the bearings with a polymeric fluoroplastic-containing antifriction coating in the presence of an oil-supporting groove are able to operate both under the boundary and under the liquid friction.
EXPERIMENTAL
The experimental study consists of verification of the developed calculation model with an oil-containing groove and complex experimental studies with a new design of the base surface of a bearing bush, which is covered by an antifriction polymer coating with a groove.
The tribological experimental studies of radial bearings were carried out using a II 5018 modernized friction machine (Figs. 4, 5).

Measurement of bulk temperature in the roller–shoe friction pair: 1, 2, thermocouples.

Pattern of the thermal imager to determine the bulk temperature in the roller-shoe friction pair with a fluoroplastic-containing composite polymer coating: 1, shoe holder; 2, prototype; 3, roller; 4, locknut; 5, thermocouple.
The samples were made in the form of partial inserts from an annular blank at a central angle of 60°. The polymer coatings and grooves were applied to their surface at a coating depth of 0.55 mm. In addition, there were holes for thermocouples in the shoes (Fig. 4).
RESULTS
As a result of the theoretical study, it was found that the bearing capacity increases by about 12–14% and the friction coefficient decreases by 8–10% within the studied modes (Table 1).
During the experimental studies, the fields of rational application of the obtained models were determined. The stable hydrodynamic friction mode was obtained after a 2-minute run-in, while the load was increased stepwise five times up to 25 MPa (Table 2).
DISCUSSION
The theoretical study established the needed section of a groove on the surface of the bearing bush for the bearing to reach the hydrodynamic lubrication mode at a given load.
Then, the calculation model that describes the flow of micropolar lubricant in the working gap was developed. When developing the model, the dependence of the lubricant viscosity on the pressure and temperature was taken into account. The obtained results allow us to find the main performance characteristics.
During the rotation of the trunnion in the groove, the circulation movement occurs in the studied structure, while the resulting force lifts the trunnion leading to the formation of a hydrodynamic wedge.
A new method to build computational models has been theoretically developed and experimentally confirmed, which makes it possible to expand significantly the scope in mechanical engineering, aircraft building, instrument making, etc., where it is needed to provide a hydrodynamic mode of lubrication.
PRIMARY RESULTS
(1) This study has demonstrated a significant expansion of the possibilities to use in practice the computational models for a bearing coated by a polymer with a groove and operating in the hydrodynamic lubrication mode, which makes it possible to determine the performance characteristics. (2) The calculation models take into account the use of additional lubrication with a polymer coating and a groove on the surface of the bearing bush. (3) The use of the studied radial plain bearings with a groove 3 mm wide substantially increases the load bearing capacity by 12–14% and decreases the friction coefficient by 8–10%. (4) The design of the bearing with a polymer coating and a groove 3 mm wide ensures stable trunnion floating, which has experimentally confirmed the correctness of the results of theoretical studies.
SPECIFICATION
\({{r}_{0}}\) | shaft radius; |
\({{r}_{1}}\) | bearing brush radius; |
\(\tilde {h}\) | groove height; |
\(e\) | eccentricity; |
\(\varepsilon \) | relative eccentricity; |
\({{\mu }_{0}}\) | typical viscosity; |
\(\mu {\kern 1pt} '\) | dynamic viscosity coefficient of lubricant; |
\(p{\kern 1pt} '\) | hydrodynamic pressure in a lubricant layer; |
\(\alpha {\kern 1pt} ',\;\beta {\kern 1pt} '\) | constant experimental coefficient; |
\(T{\kern 1pt} '\) | temperature; |
I | mechanical heat equivalent; |
λ | lubricant heat conductivity; |
\(\eta = \frac{l}{\delta }\) | structural parameter; |
\({{\eta }_{2}} = \frac{{\tilde {h}}}{\delta }\) | structural parameter describing a groove; |
θ1, θ2 | corresponding angular coordinates of a groove; |
\(u{\kern 1pt} \text{*}\left( \theta \right)\), \({v}{\kern 1pt} \text{*}\left( \theta \right)\) | known functions caused by the presence of a polymer coating on surface of the bearing bush, where Q is the lubricant consumption per unit time; Cр is the heat capacity at constant pressure; h(θ) is the thickness of the oil film. |
REFERENCES
Buyanovskii, I.A., Tatur, I.R., Samusenko, V.D., and Solenov, V.S., Effect of antifriction solid additives on the temperature stability of bentonite greases, J. Frict. Wear, 2020, vol. 41, no. 6, pp. 492–496. https://doi.org/10.3103/S1068366620060057
Albagachiev, A.Yu., Buyanovskii, I.A., Samusenko, V.D., and Chursin, A.A., Temperature resistance of Russian vacuum lubricants, Russ. Eng. Res., 2019, vol. 39, no. 12, pp. 1011–1013. https://doi.org/10.3103/s1068798x19120037
Buyanovskii, I.A., Temperature stability of lube oils under friction and its prognosis on the base of current conceptions of chemical kinetics, Mekhanizatsiya Stroitel’stva, 2015, no. 6, pp. 16–19.
Seryakov, Yu.D. and Glazunov, V.A., Thermal simulations of contacting solids with contact energy release, Probl. Prochnosti Plastichnosti, 2021, vol. 83, no. 3, pp. 311–323. https://doi.org/10.32326/1814-9146-2021-83-3-311-323
Albagachiev, A.Yu., Mikheev, A.N., Tananov, M.A., and Tokhmetova, A.B., Determination of the heating temperature of a lubricating layer with friction, J. Mach. Manuf. Reliab., 2022, vol. 51, no. 5, pp. 478–482. https://doi.org/10.3103/S1052618822050028
Albagachiev, A.Yu., Stavrovskii, M.E., Sidorov, M.I., Ragutkin, A.V., and Aleksandrov, I.A., Temperature dependences of the reaction rate in tribochemical kinetics, J. Mach. Manuf. Reliab., 2022, vol. 51, no. 6, pp. 525–531. https://doi.org/10.3103/S1052618822060024
Albagachiev, A.Yu., Mikheev, A.V., Khasyanova, D.Yu., and Tananov, M.A., Tribological studies of lubricants, J. Mach. Manuf. Reliab., 2018, vol. 47, no. 5, pp. 464–468. https://doi.org/10.3103/S1052618818050023
Levanov, I.G., Zadorozhnaya, E.A., Mukhortov, I.V., and Nikitin, D.N., Modeling of hydrodynamic plain bearings taking into account the individual anti-wear properties of lubricants, Vestn. Yuzhno-Ural. Gos. Univ. Ser.: Mashinostr., 2021, vol. 21, no. 1, pp. 14–28. https://doi.org/10.14529/engin210102
Levanov, I.G., Zadorozhnaya, E.A., and Nikitin, D.N., Modification of friction machine II5018 for studying hydrodynamic plain bearings, Sovrem. Mashinostr. Nauka Obraz., 2020, no. 9, pp. 207–223. https://doi.org/10.1872/MMF-2020-16
Rozhdestvenskii, Yu.V., Zadorozhnaya, E.A., and Mukhortov, I.V., Development of methods of studies of tribocoupling of machines and mechanisms taking into account rheology of lubricant materials, Transportnye i transportno-tekhnologicheskie sistemy. Materialy Mezhdunarodnoi nauchno-tekhnicheskoi konferentsii (Transport and Transport-Technological Systems: Proc. Int. Sci.-Tech. Conf.), Tyumen: Tyumenskii Ind. Universitet, 2013, pp. 226–230.
Rozhdestvenskii, Yu.V., Mukhortov, I.V., and Gavrilov, K.V., Problems of choice of lubricant materials at development and operation of engines of transport machines, Modernizatsiya Nauchn. Issled. Transp. Komplekse, 2014, vol. 1, pp. 184–187.
Khasyanova, D.U. and Mukutadze, M.A., Improvement of wear resistance of a journal bearing lubricated with micropolar lubricants and a molten metallic coating, J. Mach. Manuf. Reliab., 2022, vol. 51, no. 4, pp. 322–328. https://doi.org/10.3103/S1052618822040094
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
The authors declare that they have no conflicts of interest.
Additional information
Translated by M. Astov
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Khasyanova, D.U., Mukutadze, M.A. Study of Wear Resistance of a Radial Bearing Covered by a Polymer Coating with an Axial Groove on a Nonstandard Base Surface. J. Mach. Manuf. Reliab. 52, 452–459 (2023). https://doi.org/10.3103/S1052618823050102
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1052618823050102