
Abstract
Background
Though different forms of control measures have been deployed to curtail disease transmission, which are mostly through vaccination, treatment, isolation, etc., using mathematical models. Therefore, there is a need to consider the strict compliance or attendance of human individuals to medical awareness program through media outlets like radio, television, etc. In this work, a generalized mathematical model of two groups of infectious individuals who are compliant and non-compliant to medical awareness program is studied.
Results
A generalized Susceptible-Exposed-Infected-Recovered (SEIR) model with two groups of infectious individuals who attend or are compliant and those who do not attend or are non-compliant to medical awareness program is established. The analytical results of the model shows that the model is positive, well-posed, and epidemiologically reasonable. The two equilibria and the basic reproduction number Rr of the model is computed and analyzed and it is shown that the disease-free equilibrium is locally and globally asymptotically stable when Rr < 1 and the endemic equilibrium is globally stable when Rr > 1. Simulations are carried out by varying some parameters when Rr is less and above unity. The simulations suggest that control interventions are to be implemented and medical awareness program scaled up to mitigate the spread of diseases. Furthermore, two numerical methods of Runge-Kutta and Differential Transform Method (DTM) are employed to obtain the approximate solutions of the model system equations, and it is observed that the results of the two methods agreeably compare with each other in terms of efficiency and convergence.
Conclusion
This work should be taken into consideration by health policy makers and bio-mathematicians, because existing literature only take into consideration, how diseases spread and its management without considering the impact of strict compliance to consistent awareness program to mitigate the spread of diseases, which has been considered in this work. The limitation of this work is the unavailability of data on individuals in disease endemic regions who always and who do not comply with medical awareness programs.
Similar content being viewed by others


1 Background
Mathematical models are important techniques that have been greatly explored to describe the transmission dynamics of evolving and re-evolving diseases in epidemiology. The essence of epidemic models is to understand, prepare for future occurrence of epidemic breakout, and to implement necessary intervention strategies to curtail the spread of diseases in human and environment host population. One of the earliest publications on mathematical models of infectious disease are the works of [1,2,3]. The authors discussed on the division of the human host population into compartments and epidemic interactions between them. Also, several mathematical techniques have been employed by authors to quantitatively and qualitatively describe the dynamics of models of many diseases like onchocerciasis [4, 5], conjunctivitis [6], co-infection of malaria with filariasis and toxoplasmosis [7, 8], as well as using stability theorems and optimal control analysis to qualitatively and quantitatively analyse epidemic models [9,10,11]. Medical awareness programs through media outlets like radio, electronic prints, television, and social media are means of communicating to the human host community to be aware of how to mitigate disease spread and forestall healthy living [12, 13]. The basic reproduction number Rr is an epidemic threshold used to determine the number of secondary cases of infections arising as a result of an introduction of an infected individual into a susceptible host population during his or her period of infection. Rr have been used immensely to describe the reproductive rate of many diseases [14]. Also, [15] worked on the analysis of an SEIR epidemic model with saturated incidence and saturated treatment functions, while [16] investigated the impact of vaccination strategies for a SISV epidemic model guaranteeing the nonexistence of endemic solutions. In addition, [17] worked on the SEIR model formulation and compartmental epidemic interactions in the human population, while [18] worked on assessing the inference of the basic reproduction number Rr in SIR model incorporating growth scaling parameter, see also [19, 20]. Other works on SEIR modeling includes [21,22,23,24], while the publications of [25, 26] proved useful to this study by employing the use of Lyapunov functions to analyze model stability domain. Numerical methods of Runge-Kutta and DTM have proved useful in obtaining the convergent approximate solutions of epidemic models, see [27, 28]. In view of the cited publications, we consider the SEIR epidemic model with two groups of infected individuals who attend or are compliant to medical awareness program and those who did not attend or are non-compliant to medical awareness program, with saturated incidence function. Section 2 discusses the positivity and invariant region analysis of the model, while the equilibria of the model and basic reproduction number Rr is obtained. Section 3 involves the local and global stability of model system at the disease-free and endemic equilibrium solutions. Furthermore, we employ the DTM and Runge-Kutta fourth-order method to obtain the approximate solutions of the model. The results obtained agreeably compare with each other. Also, we performed simulations involving some parameters of the model when Rr < 1 and Rr > 1.
2 Model establishment and analytical results
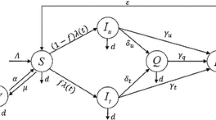
The total human host population denoted N(t), at time t > 0 is classified into five compartments of susceptible denoted S(t), which are the individuals who are at risk of acquiring the disease. Also, people who have been latently infected but are not yet infectious are denoted by E(t), symptomatic individuals who did not attend medical awareness program are denoted by Iu(t), symptomatic individuals who did attend medical awareness program are denoted by Iv(t), and the recovered individuals are denoted by R(t), so that
The susceptible population is increased by the recruitment of individuals at the rate A, following an effective contact with infected individuals in the Iu and Iv compartment, the force of infection is denoted λ(t), and described by the quantity
In (2), λ(t) is the force of infection that takes into account the high saturation of infected individuals in the human host community, where β is the transmission rate of infection and θ is the modification parameter that takes into account the relative infectiousness of medical awareness non-compliant individuals to transmit infection at a higher rate than medical awareness compliant individuals. We adopt a nonlinear saturated incidence rate in the two groups of individuals to describe the behavioral change and crowding effect of infected humans where ϕ1 and ϕ2 measures the inhibitory effect. But if ϕ1 and ϕ2 are zeros, then the incidence function follows a bilinear incidence which is commonly adopted in many models. The population of the susceptible individuals is further decreased by natural death rate μ. Thus, the rate of change of the susceptible population is given by
The population of exposed individuals is increased by the force of infection λ(t). The compartment is further on decreased by the development of clinical symptoms, natural death and the disease-induced mortality at the rate ϵ, μ and d respectively, so that
The population of the symptomatic individuals who did not attend medical awareness program is increased at the rate ϵ. It is decreased by natural recovery rate γo, the rate of emergence of new symptoms σ, natural death μ1, and disease-induced mortality rate α1. This is given by
The population of infected individuals who attended medical awareness program is increased progressively at the rate σ. The compartment is decreased by recovery rate γ1, natural death rate μ2, and disease-induced mortality α2. It is assumed that the disease-induced mortality rate of individuals who attended medical awareness program is low in comparison with infected individuals who did not attend medical awareness program, such that α2 < α1. Hence, the rate of change of this population is given by
Finally, the population of recovered individuals is generated by the recovery of individuals who attend and who did not attend medical awareness program at the rate γo and γ1, while it is decreased by natural death rate μ, so that
Thus, the model for the transmission dynamics of a generalized infectious disease with non-linear incidence of two groups of infected individuals who attend and did not attend medical awareness follows a first order system of ordinary differential equations given by
Subject to the initial conditions S(0) = So, E(0) = Eo, Iu(0) = Iuo, Iv(0) = Ivo, R(0) = Ro.
2.1 Positivity of the model
It is assumed that the initial conditions of the model are non-negative and it is necessary to show that the solution of the model is positive.
Theorem 1: Let Ω = {(S, E, Iu, Iv, R) ∈ R+5 : So > 0, Eo > 0, Iuo > 0, Ivo > 0, Ro > 0}. Then the solutions of S, E, Iu, Iv, R are positive for t ≥ 0.
Proof: From the model system of differential Eq. (8), considering the first state equation given by
Solving (9) using separation of variable and applying the initial condition S(0) = So, yields
Also, from the second state equation of (8),
Simplifying (11) further yields
On solving (12) using separation of variable and applying initial condition E(0) = Eo, yields
From the third state equation in (8),
Simplifying (14) further become,
Solving (15) using separation of variable and applying initial condition Iu(0) = Iuo, yields
In addition, taking the fourth state equation of (8),
where
Solving (18) using separation of variable and applying initial condition Iv(0) = Ivo, yields
Finally, taking the fifth state equation of (8),
The simplification of (20) yields
Solving (21) using separation of variable and applying initial condition R(0) = Ro, yields
From (10), (13), (16), (19), and (22), it is clear that at time t > 0, the model solutions are positive.
This completes the proof of the theorem.
2.2 Invariant region
In this section, the model system is analyzed in an invariant region and shown to be bounded. The addition of the whole model system Eq. (8) yields
such that
and
In the absence of natural and mortality due to disease, i.e., (d = 0, α1 = 0, α2 = 0), (25) becomes
Integrating both side of (26) yields
and
Simplification of (28) become
Applying the initial condition, N(0) = No, (29) yields A = A − μNo. Substituting A = A − μNo into (29) yields
Further simplification and re-arrangement of (30) yields
As t → ∞ in (31), the population size \( N\to \frac{A}{\mu } \) implies that \( 0\le N\le \frac{A}{\mu } \). Thus, the feasible solution set of the system equations of the model start and end in the region
Therefore, the basic model (8) is well posed mathematically and epidemiologically reasonable. Hence, it is sufficient to study the dynamics of the model system (8) in Ω.
2.3 Equilibria
To find the disease-free equilibrium solutions, the right-hand side of the model system (8) is equated to zero, evaluating it at when there is no disease in the system, i.e., E = Iu = Iv = 0. Therefore, the disease-free equilibrium solutions are given by
The endemic equilibrium is denoted E∗∗ = (S∗∗, E∗∗, Iu∗∗, Iv∗∗, R∗∗) and it occurs when a disease persist in the human host population. Therefore
Where m1 = (λ + μ), m2 = (ϵ + μ + d), m3 = (γo + μ1 + α1 + σ), m4 = (μ2 + γ1 + α2).
2.4 Basic reproduction number (R r)
We want to show how the threshold that governs the spread of a disease, called the basic reproduction number is obtained.
Theorem 2.
Define Xs = {X = 0| Xi, i = 1, 2, 3, …}, in order to obtain Rr, new infections are distinguished from other changes in the populations. Such that, Fi(x) is the rate of new manifestations of clinical symptoms in compartment i. Also, let \( {V}_i^{+} \) be the rate at which individuals move out of compartment i. Then xi = Fi(x) − Vi(x), i = 1, 2, 3, …. , and \( {V}_i(x)={V}_i^{-}-{V}_i^{+} \). F is a non negative matrix and V is a non-singular matrix.
Proof: We applied the next generation matrix method to the model equations starting with newly infective classes given by
The rate of new clinical symptoms is given by
And the rate of transfer terms of individuals is given by
The Jacobian matrices of F and V evaluated at disease-free equilibrium solution (33) are given by
and
The inverse of V is given by
and
The eigenvalues of FV−1 in (41) are given by
The dominant eigenvalue in (42) is λ3. Therefore, the basic reproduction number Rr is given by
The threshold in (43) measures the rate at which new cases of infection arises, when a typical infected individual is introduced into a susceptible population of humans during their course of infection.
3 Stability analysis of the model system equilibria
3.1 Local stability of the disease-free equilibrium
Theorem 2: The disease-free equilibrium solution Eo (33) is locally asymptotically stable if Rr < 1.
Proof: The Jacobian matrix of system (8) at the disease-free equilibrium solution Eo of (33) is given by
The eigenvalues obtained in (44) yield
The remaining characteristics polynomial is given by
It is observed that (46) has strictly negative real root if and only if m3 > 0 and m4 > 0, and m3 > m4. Also, m3 is positive and for m4 to be positive, 1−Rr must be positive which leads to Rr < 1. Therefore, the disease-free equilibrium Eo (33) of model (8) is locally asymptotically stable if Rr < 1.
3.2 Global stability of disease-free equilibrium
Theorem: The disease free equilibrium solution Eo (33) of model system (8) is globally asymptotically stable whenever Rr < 1.
Proof: A Lyapunov function is derived for the model system such that
Where
and
Since \( \frac{A}{\mu } \) in (33), further simplification becomes
and
Therefore
Since all the parameters and variables of the model system (8) are nonnegative, it follows that \( \dot{F} \) ≤ 0 for Rr < 1 with \( \dot{F} \) = 0 if and only if E = Iu = Iv = 0. Hence, \( \dot{F} \) is a Lyapunov function in Ω. Therefore, the largest compact invariant subset of the set where \( \dot{F} \) = 0 is the singleton {(E, Iu, Iv) = (0, 0, 0)}. Thus, it follows, from the La-Salle’s invariant principle [19], that as t → ∞ ,
Therefore the disease-free equilibrium (33), of model (8) is globally asymptotically stable if Rtr < 1.
3.3 Global stability of endemic equilibrium
Theorem: If Rr > 1, the endemic equilibrium solution (34) of the model system (8) is globally asymptotically stable.
Proof: A Lyapunov function candidate of the form
is derived, such that the time derivative of (54) becomes
so that
and
Further simplification of (57) yields
and
Hence, by collecting positive terms together and negative terms together in (59) becomes
Where
And
Thus if B1 < B2, then \( \frac{dL}{dt} \) ≤ 0. Note that, \( \frac{dL}{dt} \)= 0 if and only if \( \left(S={S}^{\ast }\ E={E}^{\ast },\kern0.5em {I}_u={I}_u^{\ast },\kern0.5em {I}_v={I}_v^{\ast },\kern0.5em R={R}^{\ast}\right) \). Therefore, the largest compact, invariant set in \( \left[\right({S}^{\ast },{E}^{\ast },{I}_u^{\ast },{I}_V^{\ast },{R}^{\ast } \)) ∈Ω: \( \frac{dL}{dt} \) = 0] is the singleton set E∗∗, where E∗∗ is the endemic equilibrium solution (34) of the model system (8). By La-Salle’s invariant principle [20], E∗∗ is globally asymptotically stable in Ω if B1 < B2.
3.4 Approximate solution of the SEIR epidemic model
In this section, the approximate solution of the model system (8) is obtained, using the Runge-Kutta fourth order and DTM. The concept of DTM was first proposed by Zhou [28] for solving linear and nonlinear initial value problems in electrical circuit analysis. The method in many instances have been adopted to solve series of models based on differential equations. The concept of DTM is derived from the Taylor series expansion. This method requires that a system of differential equations together with its initial and boundary conditions are transformed into recurrent power series solutions.
Taylor series expansion of a function f(x) about the point x = 0 is given by
For all x ∈ (c − r, c + r) such that x = c converges to f(x).
Definition 1: The differential transformation F(k) of a function f(x) is defined as
Definition 2: It follows from Eqs. (63) and (64) that the differential inverse transformation f (x) of F (k) is given by
Using (63)–(64), the following basic operations of DTM [26, 28] is tabulated below;
If S(k), E(k), Iu(k), Iv(k), and R(k) denote the differential transformation of S(t), E(t), Iu(t), Iv(t), and R(t) respectively, then the following recurrence relation of model system (8) are given by
Applying the values of variables and parameters in Table 1 together with the initial conditions of the model, yields the following results given by
Substituting the values in (67) into (66) yields, the recurrence relation given by the following;
The closed form solutions when k = 3, in (68) is given by
Also, the idea of Runge-Kutta method was conceived by Carl Runge and Wilhem Kutta. This work employs the Runge-Kutta fourth-order method because of its accuracy and faster convergence, which have been employed to solve several problems in differential equations applied to science, engineering, economics etc. The numerical scheme for this method is given by
Where
Applying the Runge-Kutta scheme to the model system (8) yields
Where
Also,
and
And
Substituting (73) to (76), together with the parameter values and initial conditions of the model system (8) into (72) yield the numerical results in Table 2.
3.5 Results
Simulations are carried out by varying some parameters of the models when the basic reproduction number Rtr < 1 as shown in Figs. 1, 2, 3, 4, 5, and 6, that is, the parameter solutions converges to the disease-free equilibrium. Tables 1 and 3 display the parameter and variable values used in the simulations of the model and the basic operations of DTM. Also, the numerical results of the model system is presented using Runge-Kutta fourth order and differential transform method (DTM) in Tables 2 and 4 which compare agreeably with each other, and the DTM performs better. Figure 1 is the description of the impact of disease transmission rate β. As time increases, transmission of disease increases, but the steady decline, indicate that more humans are being aware of their disease status leading to quick movement to recovery state or probably death in the case of fatality. It is observed in Fig. 2 that there is a decrease of infection from the 1st–6th month as time increases, but a gradual rise of infection from the 7th–12th month depict that emergence of infection will be on the rise in the absence of health intervention policies. Figures 3 and 4 is the depiction of the high saturation of diseases in human host population as time increases. Strict compliance, increase of medical awareness programs, and treatment are needed to mitigate the high saturation of the disease in human host community, while Figs. 5 and 6 is the depiction of the impact of the variation of treatment rates γo and γ1 in infected humans. As time increases, a steady rise in the curve indicate that treatment is essential in minimizing infection in human host community.

Varying β(0.001 − 0.027) when Rr < 1

Varying ϵ(0.001 − 0.0041) when Rr < 1

Varying ϕ1(0.212 − 0.612) when Rr < 1

Varying ϕ2(0.40 − 0.220) when Rr < 1

Varying γo(0.123 − 0.203) when Rr < 1

Varying γ1(0.100 − 0.164) when Rr < 1
In addition, simulations of variations of some increased parameter values displayed in Figs. 7, 8, 9, 10, 11, and 12 reveal that the parameter solutions converges to the endemic state, that is, Rr > 1. This implies that, for the system not to remain in the endemic state, transmission and new clinical manifestations of disease must be minimized by scaling up treatment and medical awareness program rate.

Varying β(0.710 − 0.960) when Rr > 1

Varying ϵ(0.260 − 0.661) when Rr > 1

Varying ϕ1(0.412 − 0.812) when Rr > 1

Varying ϕ2(0.500 − 0.680) when Rr > 1

Varying γ1(0.300 − 0.436) when Rr > 1

Varying γo(0.420 − 0.490) when Rr > 1
Figure 13 is the description of the sub-population of susceptible individuals who are at the risk of acquiring the disease. As time increases in the absence of control, more susceptible individuals become exposed to the disease. Figure 14 is the description of the sub-population of exposed individuals who are latently infected. As time increases, there is a quick inflow of exposed individuals moving into the infectious class. Figure 15 is the depiction of the behavior of sub-population of infected individuals who attend or are compliant to medical awareness program. As time increases, their compliance to medical awareness program leads to decrease of infected individuals as they are available to treatment, care, etc. Figure 16 is description of the behavior of the sub-population of infected individuals who did not attend or are non-compliant to medical awareness program. As time increases, non compliance to medical awareness program results to fatal cases and probably death. Figure 17 is the description of the behavior of the recovered sub-population. Recovered humans increases as healthy measures are adopted by infected individuals leading to the reduction and elimination of the disease prevalence in human host community as time increases.

Description of the sub-population of susceptible individuals who are at the risk of acquiring the disease

Description of the sub-population of exposed individuals who are latently infected

Depiction of the behavior of sub-population of infected individuals who attend or are compliant to medical awareness program

Description of the behavior of the sub-population of infected individuals who did not attend or are non-compliant to medical awareness program

Description of the behavior of the recovered sub-population
4 Conclusion
A generalized SEIR model describing the transmission of disease in human host community of infected individuals who attend or compliant and who did not attend (non-compliant) medical awareness program is established. Qualitative and quantitative mathematical techniques were used to analyze the invariant region and boundedness of the model. Also, the basic reproduction number (Rr) and the equilibria is obtained to show that if Rr < 1, the SEIR model disease-free equilibrium is locally and globally asymptotically stable and if Rr > 1, the endemic equilibrium solution is globally asymptotically stable. Numerical methods of DTM and Runge-Kutta fourth-order method are employed to obtain the approximate solutions of the model as shown in Tables 2 and 4, which reveal that the two methods agree favorably with each other. Simulations of the model parameters when Rr < 1 and Rr > 1 is performed in Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 and 12 and the graphical behavior of the model in Figs. 13, 14, 15, 16 and 17 reveal that educational awareness about an epidemic breakout is essential in curbing the menace and endemicity of a disease. However, the limitation of this study is that the model cannot incorporate all the complexities involving human behavioral change toward compliance to medical awareness program and lack of real life data involving registration of human individuals that are medical awareness compliant or not in any endemic disease setting. To this end, this work is still recommended further for proper data fit to the model.
Availability of data and materials
Not applicable.
Abbreviations
- SEIR:
-
Susceptible - Exposed - Infected - Recovered
- DTM:
-
Differential Transform Method (DTM)
References
Kermack WO, Mckendrick AG (1927) A contribution to the mathematical theory of epidemics. Proc R Soc Lond 115:700–721 https://doi.org/10.1098/rspa.1927.0118
Anderson RM, May RM (1991) Infectious disease of humans. Oxford University Press, London
Berreta E, Capasso V (1996) On the general structure of an epidemic system. Comp Math Appl 12:677–694
Idowu AS, Ogunmiloro OM (2020) Transmission dynamics of onhocerciasis with two classes of infections and saturated treatment function. Int J Model Simul Sci Comput 11(05):2050045 (24 pages) https://doi.org/10.1142/S1793962320500476
Ogunmiloro OM, Idowu AS (2020) On the existence of invariant domain and local asymptotic behaviour of a delayed onchocerciasis model. Int J Mod Phys C 2050047:24 https://doi.org/10.1142/S0129183120501429
Ogunmiloro OM (2020) Stability analysis and optimal control of strategies of direct and indirect transmission dynamics of conjunctivitis. Math Meth Appl Sci:1–18 https://doi.org/10.1002/mma.6756
Ogunmiloro OM (2019, 2019) Local and global asymptotic behavior of malaria –filariasis co-infections in complaint and non-complaint susceptible pregnant women to antenatal medical programs in the tropics. e-J Anal Appl Math (1):31–54 https://doi.org/10.2478/ejaam-2019-0003
Ogunmiloro OM (2019) Mathematical modeling of the co-infection dynamics of malaria-toxoplasmosis in the tropics. Biomed Lett 56(2):139–163 https://doi.org/10.2478/ejaam-2019-0003
Bahaa GM (2017) Fractional optimal control problem for variable-order differential system. Fract Calc Appl Anal 20(6):1447–1470 https://doi.org/10.1515/fca-2017-0076
Bahaa GM (2017) Fractional optimal control problem for differential system with delay argument. Adv Differ Equ 69(2017):1447–1470 https://doi.org/10.1186/s13662-017-1121-6
Bahaa GM (2017) Fractional optimal control problem for variational inequalities with control constraints. IMA J Math Control Inf 35(1):107–122 https://doi.org/10.1093/imamci/dnw040
Fagbamigbe AF, Idemudia ES (2015) Barriers to antenatal care use in Nigeria: evidences rom non-users and implications for maternal health programming. BMC Pregnancy Child Birth 15(95) https://doi.org/10.1186/s12884-015-0527-y
Makinde AO, Odimegwu CO (2020) Compliance with disease surveillance and notification by private health providers in south west Nigeria. Pan Afr Med J 35:114 https://doi.org/10.11604/pamj.2020.35.114.21188
Diekmann O, Heesterbeek JAP, Roberts MG (2010) Construction of next generation matrices for compartmental epidemic models. J R Soc Biol Interface 7:873–885 https://doi.org/10.1098/rsif.2009.0386
Zhang J, Jia J (2014) Song X (2010) Analysis of an SEIR model with saturated incidence and saturated treatment. Sci World J 910421:11 https://doi.org/10.1155/2014/910421
Alonso-Quesada S, De la Sen M, Nistal R (2018) On vaccination strategies for a SISV epidemic model guaranteeing the nonexistence of endemic solutions. Discret Dyn Nat Soc 20:9484121 https://doi.org/10.1155/2018/9484121
Chitnis N (2017) Introduction to SEIR models, workshop on mathematical models of climate variability, environmental change and infectious diseases, Trieste Italy May 8
Ganyani T (2018) Accessing inference of the basic reproduction number in an SIR model incorporating growth scaling parameter. Stat Med 37(29):4490–45067 https://doi.org/10.1002/sim.7935
LaSalle J, Lifschetz S (1961) Sability of Lyapunov’s direct method with applications. Academic, New York
Korobeinikov A (2004) Lyapunov functions and global properties for SEIR and SEIS epidemic models. Math Med Biol 21:75–83 https://doi.org/10.1093/imammb21.2.75
He S, Peng Y, Sun K (2020) SEIR modeling of the COVID-19 and its dynamics. Nonlinear Dyn https://doi.org/10.1007/s11071-020-05743-y
Adebimpe O, Abiodun OE, Olubodun O, Gbadamosi B (2020) Dynamics and stability analysis of SEIRS model with saturated incidence rate and treatment. In: 2020 international conference in mathematics, computer engineering and computer science, ICMCECS 2020. Institute of Electrical and Electronics Engineers Inc https://doi.org/10.1109/ICMCECS47690.2020.246987
Khan MA, Khan Y, Islam S (2018) Complex dynamics of an SEIR epidemic model with saturated incidence rate and treatment. Physica A Stat Mech Appl 493:210–227 https://doi.org/10.1016/j.physa.2017.10.038
Chowell G (2017) Fitting dynamic models to epidemic outbreak with quantified uncertainty, identifiability and forecasts. Infect Dis Model 2(3):379–398 https://doi.org/10.1016/j.dm.2017.08.001
Side S, Utami AM, Surkana PMI (2018) Numerical solution of SIR model for transmission of tuberculosis by Runge – Kutta method. J Phys Conf Ser 1040:0122021 https://doi.org/10.1088/1742-6596/1040/1/012021
Ogunmiloro OM, Abedo FO, Kareem HA (2019) Numerical and stability analysis of the transmission dynamics of SVIR epidemic model with standard incidence rate. Malays J Comput 4(2):349–361 eISSN: 2600-8238 online
Tan D, Chen Z (2012) On a general formula for fourth order Runge–Kutta method. J Math Sci Math Educ 7(2):1–10
Zhou JK (1986) Differential transformation and its applications for Electrical Circuits (in Chinese). Huazhong University Press, Wuhan
Acknowledgement
We acknowledge the effort of academic colleagues at the department of Mathematics, Faculty of Science, Ekiti state university, Ado–Ekiti, Nigeria.
Funding
No funding have been received.
Author information
Authors and Affiliations
Contributions
OM reviewed and established the model as well as discussion of the numerical results, while KH performed the analysis and numerical computations of the work. All authors have read and approved the manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
There is no competing interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ogunmiloro, O.M., Kareem, H. Mathematical analysis of a generalized epidemic model with nonlinear incidence function. Beni-Suef Univ J Basic Appl Sci 10, 15 (2021). https://doi.org/10.1186/s43088-021-00097-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s43088-021-00097-9