
Abstract
High penetration of renewable energy sources (RES) leads to new challenges for protection devices. Protection schemes are typically designed according to the dynamic behavior of rotating machines as generation sources, while the RES dynamic response, mainly governed by inverters, is not considered. Consequently, some relevant algorithms of transmission line protection are experiencing challenges because of the fact that magnitude and phase angle comparison, amount of negative-sequence, and short-circuit current level are affected by the RES. Therefore, an in-depth study of this issue is necessary, one which considers the main causes and new methodological criteria solutions. This work presents an extensive literature review of the evaluation of electrical protection performance and the effects of RES connected to a power grid through inverters. Bibliographic data on many representative publications related to this topic are obtained to show the current research lines and their proposed solutions. In addition, this work identifies the main protection functions affected and describes the new protection schemes that consider RES. Finally, an analysis and discussion of the selected bibliography are presented.
Similar content being viewed by others
1 Introduction
In recent years, electrical power systems (EPSs) have experienced continuous evolution, much of which relates to RES. This is largely driven by international commitments to reducing CO2 emissions, social demands to tackle climate change, government incentives for clean energy, and fast cost reduction of new technologies. Wind farms (WFs) and photovoltaic plants (PVPs) are the main RES. These can significantly influence EPS. A previous report [1] indicates that their presence in EPS will continue to increase.
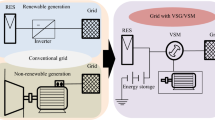
RESs can be classified into two groups from a dynamic point of view. The first group includes generation sources based on rotary machines connected directly to a grid, whereas the second group includes generation sources connected to a grid through power electronics (PE) equipment operating under the principles of fast converter switching and associated control systems. Many authors refer to the second group as an RES connected to the grid through an inverter as an interface, or simply inverter-based resources (IBRs) as shown in Fig. 1. This configuration is designed to take advantage of efficient use of energy [2], and new ways of energy generation have been developed and implemented on a large scale, such as the renewable power plants presented in [3].

Structure of IBRs: a photovoltaic plant, b wind farm type IV
An important aspect of IBRs is the ability to control the current rising rate and limit the short-circuit (SC) current without intervention from external circuits. For the WFs, each type of technology has a different SC-current behavior [4]. Therefore, the SC-current feature is an important issue, as the use of inverter-based generation continues to expand in EPS [5]. Consequently, traditional schemes in transmission line protection (distance, differential and directional overcurrent) which are composed of protection elements as the logic inputs of the main scheme, may experience challenges. Each element is based on algorithms, whose inputs are phasor signals of voltage and current in all sequences. Moreover, RESs may significantly affect some input quantities of protection algorithms and thus affect certain schemes such as negative-sequence directional, fault-type identification and phase directional elements, or impedance measurement. Therefore, traditional relays may be inadequate, since protection schemes and logics consider a system composed of synchronous generators.
Voltage and current signals present limited transient magnitudes accompanied by high harmonic distortion, as studied in [6, 7]. Low-inertia systems, complex IBR models, interactions between synchronous machine controllers and inverter controllers are studied in [8]. High penetration of IBRs entails changes in the paradigms for coordination of control and protection systems, as indicated in [9].
Therefore, this new generation source affects scheme protection. This has made it an interesting research topic. Accordingly, this paper analyzes the most representative of transmission line (TL) protection schemes in systems influenced by IBRs through an exhaustive bibliographic review. Finally, a summary of the main proposed solution methods to reduce or mitigate effects is provided.
2 Characteristics of IBR operation and fault response
The capacitor in a DC link (Fig. 1) decouples fault dynamics in an EPS with events associated with wind speed and solar intensity variation. While the fault response time is very fast, the intermittent response is slow. Therefore, an inverter is the main device which influences the dynamic behavior of IBRs during an electrical fault because their actuation time is mainly focused on the response time of the power system control [10]. The main fault control system uses voltage and current signals measured at the point of common coupling (PCC), and then their control process uses phasor signals obtained by Fourier transform (FFT) of measured signals, and it typically requires a 1 cycle time window [11]. However, a mutual agreement on the response time requirements between IBR owners and operator entity must have a clear technical base [12].
In the presence of electrical faults, energy conversion by traditional generation sources or synchronous generators is based on electromagnetic procedures and energy storage involves magnetic fields. Therefore, during a fault or transient, variations in the stored magnetic energy cannot occur instantaneously because a certain transitory period must elapse until stabilization under new conditions, as represented by (1). On the other hand, signals directly affected by IBRs are divided into three periods. In the first period there is an SC-current peak which depends on the values of the LCL filter and capacitor in the DC link, and it may reach magnitudes higher than 2 per unit (p.u.) on the inverter's base rating. The second period involves regulation, during which the inverter control system operates to regulate the DC link voltage in order to supply current governed by grid codes (GC) according to fault ride-through (FRT) characteristics and limit the SC-current peak. Finally, during the third period, the inverter output current reaches and maintains an approximately constant value (Fig. 2). Consequently, the IBR's behavior is not typical and may be represented as a function of fault conditions, their structures, and their control system setting parameters, as shown in (2).
where FC means fault conditions (fault resistance, angle of insertion, fault location), ST refers to structure and CSS to control system setting.

SC-current behavior during a two-phase fault
-
xd″: Subtransient reactance
-
xd′: Transient reactance
-
Td″: Subtransient time constant
-
Td′: transient time constant
-
Eq: Quadrature axis voltage
-
xd: Synchronous reactance
-
Ta: Armature time constants
Inverters usually have a saturation block that limits the fault currents to protect PE devices. This block is generally set to values between 1.1–1.3 p.u. [13] but can be up to 1.5 p.u. in special cases. Differences in the SC-current magnitude for each type of generation source is evident in Fig. 3. A static generator / IBR shows a different current magnitude feature after faults from other sources. Another clear example of the SC-current behavior is presented by different types of WFs and is described in [14, 15]. In addition, the characteristics of WF-IV generator (Full-scale converter generator, FSC) are different from those of a WF-III generator (Doubly fed induction generator, DFIG), while features of these generators are also different from WF-I and II generators.

SC-current features for different sources
On the other hand, it is known that the impedance angles of synchronous generators are stable and approximately close to 90°, while the internal impedance angles of IBRs may oscillate, and can even be capacitive, resistive, or inductive depending on the operation mode. The inverter control system causes these characteristics as it tries to keep the phase shift balanced even in the presence of faults. In addition, IBR behavior heavily relies on control system strategies during FRT. These are defined by modern GCs [16]. FRT requires the inverters to stay connected and provide reactive power support to grid during a fault without tripping. Furthermore, utilities set the FRT requirements of each interconnection, and IBRs are expected to behave in a certain way during disturbances, as specified by Standard IEEE-1547 [17]. Therefore, characteristics of FRT are highly dependent on electrical system behavior [18,19,20,21] summarize the requirements and GC configurations adopted in many countries from Europe, Asia, and America.
RESs should be designed with capabilities to operate in three possible modes, namely voltage, power factor and reactive power control. These are related to the following characteristics:
-
Low voltage ride through profiles (Voltage–time profile).
-
Reactive power requirement as a function of active power at nominal voltage (PQ profiles).
-
Reactive power requirement as a function of voltage (UQ profiles).
The required reactive current (Iq) behavior may change according to system needs. For example, in Fig. 4, the slope “k” may vary over the range of 2 ≤ k ≤ 6. The current limits (∆Iqmax, ∆Iqmin) may be ± 1.0 or ± 1.1 p.u. and the voltage dead-band (Udead band) can be in the range of 2.5–10% [22]. These FRT characteristics cause different behavior in the reactive fault current.

Reactive power vs voltage support characteristic
From the structure of IBRs, the inverters do not supply zero-sequence current (I0) because of no ground return connection. Additionally, the negative-sequence current (I2) is controlled and usually has a minimum magnitude [5]. The operating features and fault response of IBRs are summarized in Table 1.
3 Main protection schemes in transmission lines (TLs)
This work focuses on the main protection schemes in TLs:
-
Distance protection.
-
Differential protection.
-
Directional overcurrent protection.
In addition, protection elements and logics that can be used as inputs to the above-mentioned schemes include:
-
Directional element protection.
-
Negative-sequence protection.
-
Fault-phase identification logic, fault identification selection (FIDS).
3.1 Distance protection (function 21)
Function 21 is a reliable and selective protection for TLs where their terminals are relatively far apart, i.e., for long lines [23]. It is a protective relay with responses to input quantities based mainly on a function of the electrical circuit distance between a relay location and the point of the fault [24]. This protection scheme determines the fault impedance by relating the phasor values of measured voltage and current. The calculated impedance is then compared with zone settings by the TL's impedance in order to verify a condition where this impedance is within the protection zone, and under that condition sends a trip action to the breaker [25]. Equation (3) shows the fault impedance calculation for a TL, where \(m\) is the percentage of fault location measured from bus R, ZTL is the TL phasor impedance, \(\overline{I}_{L}\) and \(\overline{I}_{R}\) are the phasor fault current contributions of the TL terminals, and \(\overline{Z}_{K}\) is the phasor fault impedance. This fault is protected from both TL ends as shown in Fig. 5. In general ZK can be represented as a resistance (Rf).

Fault in TL with two power supplies
Equations (4) and (5) represent reactance and resistance impedance variations (∆X and ∆R) obtained from Eq. (3), respectively. Therefore, the fault impedance calculated by relays depends on magnitude and phase angle relationships of the current signals from both ends and the fault impedance. In a three-phase system (ABC), distance relay algorithms determine three phase–phase loops (21AB, 21BC, and 21AC) and three phase–ground loops (21AG, 21BG, and 21CG). The operation logic consists of activating the following conditions using AND logic:
-
Impedance calculation zone 1 setting is 80% of the TL impedance, zone 2 setting is 120% of the TL impedance with a time delay, and zone 3 covers almost all the TL adjacent with high time delay. When a fault impedance is inside the zone, this logic is activated.
-
Fault detector threshold (starting) The overcurrent applied setting should be approximately 1.2–1.3 of the maximum load current for phases (In) and 0.3–0.5 of the current transformer rating for ground fault currents. For under-impedance, the voltage threshold is controlled by current, so that the pick-up sensitivity of voltage is increased as the current increases. Typical settings are: I > 0.25In, I > > 2.5In, as well as V(I >) = 70%Vn and V(I > >) = 90%Vn. Other methods are angle-dependent under-impedance starting (VI/φ) and impedance starting [26].
-
Directional elements.
-
Fault-phase identification logic.
The above two conditions will be discussed in detail below. It should be highlighted that directional elements and fault-phase identification logic use polarization of voltages. These include phases not involved in the fault. Table 2 shows a summary of all operating and polarizing variables.
It is important to mention that some relay manufacturers use zero- and negative-sequences for polarization, as detailed further below.
3.2 Differential protection (function 81)
The operating principle of differential protection is represented as:
where \(I_{op}\) and \(I_{res}\) are the differential current and restriction current, respectively. An element generates a tripping signal when \(I_{op}\) is greater than a percentage of \(I_{res}\) and a minimum pickup current is exceeded. \(I_{op0}\) is the threshold value that prevents relay malfunction when the restriction current is close to zero with “k” as the restriction coefficient.
The differential operation of the currents is conducted using phasor measurements for each phase. The operation logic of this protection function consists of the activation of the following conditions using an AND logic:
-
Threshold current for start.
-
Fault-phase selection logic.
-
Angular difference of currents.
For internal faults (Fig. 6), the current angles for both sides of a TL are in phase under ideal conditions. In general, the angle difference depends on the source voltage angles (pre-fault power flow condition) and the angles of the system impedances at both sides of the fault point [25].

Alpha plane characteristic
Many manufacturers also choose to use zero- and negative-sequence elements to provide sensitive protection in the presence of unbalanced faults.
3.3 Directional element protection (function 32)
-
(a)
Directional elements for phase fault protection (32P)
Directional elements mainly determine the direction of faults (forward or backward). Therefore they are part of the principal protection schemes and these elements respond to a phase change between a polarized quantity and an operational quantity (Table 2). In the example in Fig.7the voltage (V) represents the polarized quantity and current (I) the operational quantity. The operating condition is given as:
where \(\varphi_{sen}\) represents the maximum sensitivity angle, which can be equal to the TL impedance angle from bus to fault point. This expression can be represented in an impedance plane (R-X) as shown in Fig. 8.

Directional element operation. a General electrical system, b Blue zone means forward condition, and c Orange zone means reverse condition

X-R plane of forward and reverse fault characterization
TL impedance features are predominantly inductive. Thus, when the current lags with respect to the voltage, a forward fault occurs. In contrast, when the current signal changes its sign, it is considered a backward fault.
-
(b)
Directional elements for ground fault protection
During a ground fault, the negative- and zero-sequence, voltage-polarized directional elements respond to impedance. Therefore, voltage-polarized directional elements are complemented by 32Q or 32G. The most common schemes that can be used to detect fault direction are shown in Table 3.
The 32I element can determine the direction when the fault-type identification (FID) logic trips and indicates a balanced fault. In comparison, the 32Q or 32G elements are used when the FID logic asserts an unbalanced fault. In addition, some manufacturers also use combinations of these elements.
3.4 Negative-sequence protection
This protection depends on negative-sequence current which has advantages over zero-sequence current. For instance, it is insensitive to zero-sequence mutual coupling and is not vulnerable to excessive tripping on external ground faults on TLs that share right of way. Moreover, it requires only a simple calculation. Its functions are as follows.
-
(a)
Negative-sequence overcurrent element (50Q/51Q)
This function operates from a starting threshold value known as a pickup setting and a time dial. With synchronous generators, it does not present any issue in starting because of high negative-sequence current. In practical application, the thresholds are set at least higher than 1.5 times the nominal rated current.
-
(b)
Directional negative-sequence overcurrent element (67Q)
Unlike the previous function, this is characterized by determining the directionality of a fault based on the negative-sequence voltage (V2) and current values, as shown in Fig. 9.

Apparent negative-sequence fault impedance seen by 67Q
The criterion is based on the fact that a forward/reverse fault causes a phase angle of approximately − 90°/90° for the voltage phasor with respect to the current phasor [27,28,29]. This assumption stems from the highly inductive nature of the negative-sequence network in a network dominated by synchronous generators.
3.5 Faulted-phase identification
Phase selection is important in preventing incorrect operation as it allows the identification of faulty phases and is part of protection schemes. There are schemes that have changed and are applied to phase fault selection loops, such as:
-
A computationally efficient numerical method of characterizing distance elements onto a single point on a number line.
-
Positive-sequence memory polarization for low- (or zero-) voltage faults for over 1 s.
-
FIDS logic that uses measured negative- and zero-sequence currents.
-
Decision trees (DTs) algorithm, including magnitude of currents, delta currents, magnitude of voltages, delta voltages, and impedances. Because of the structure of the DT, not all criteria are evaluated to obtain a result.
Therefore, fault identification logic can also be used to differentiate balanced and unbalanced faults. This function serves as an input element for main functions.
-
(a)
FIDS Logic
This scheme involves the identification of a fault type based on a phase angle relationship between negative- and zero-sequence currents. The fault loop classification method was shown in Fig. 7. A successful FIDS operation is based on the validity of the assumed mathematical relationships between the phase angles of zero- (Ia0) and negative-sequence (Ia2) quantities of phase A (Fig. 10, Table 4). In a network dominated by synchronous generators, this relationship is valid because of the inductive nature of the negative-sequence network and the impedance of the machines [30].

Fault identification criteria
3.6 Directional overcurrent protection (function 67)
Directional overcurrent protection uses directional elements to supervise the operation of overcurrent elements [25]. This element has been described in the previous section. On the other hand, when three-phase and phase-to-phase SC faults occur at any point in a power system, the amplitude of the SC-current is usually larger than the load current, and thus the overcurrent protection is distinguished from a normal operating state by the amplitude of currents [31]. This criterion is simple and reliable, and easy to implement. The operating logic is based on (9), where Iset is the starting threshold current:
It has been shown that all functions and protection elements are based on different schemes, while some of them present certain variations because of the operating logics of different manufacturers. In general, phasors and polarization are two important and useful tools in traditional power system protection, and these concepts are essential in understanding power system performance during both normal and abnormal operation. Phasors are composed of magnitude and angle, while polarization is a comparison between two phasor quantities. The phasors are derived from transforming sinusoidal signals by FFT.
In addition, a referential percentage of influence of the phasor quantities and comparisons among them for each protection function are shown in Table 5. It can be seen that distance protection and directional element require the most signals for their protection scheme. This indicates that distance protection will be greatly affected by the influence of IBRs while differential protection will be largely unaffected.
4 Review of the state of the art
This review is focused on challenges of TL protection studies considering the influence of IBRs. The cited works are based on experience and theory. M, while many new protection methods have been developed to suppress or minimize the effect of IBRs.
4.1 Protection scheme challenges with IBR integration
-
(a)
Challenges in distance protection
The main problems of TLs emanating from IBRs in distance relays are described in this section. A previous study in [32] describes the impedance behavior of IBRs with FRT under two different GCs: the European (EU) and the North American (NA). It is shown that reactive current required by the EU-GC translates into impedances seen near the reactive axis. In contrast, the power factor requirement of the NA-GC translates into impedances along the resistive axis. As a result, in both cases, the impedances seen from faults are far from the actual fault impedances. Therefore, it concludes that the variations of the impedances seen depend on the control strategies implemented in the IBRs. This is further stated in [33], where it is reported that the impedance measured on the IBR side has a different characteristic, causing conventional distance protection to malfunction, as the inverter control system limits the SC-current and controls the angle shift. However, in [34], it emphasizes problems in the response time of the control system (rise time) when the IBRs supply reactive power. It shows that a slow response time causes a malfunction in the distance relay, since zone 2 might be mistaken for zone 1 during a fault. In [35], distance protection behavior is detailed in a distribution system with high penetration of IBRs, and a dynamic analysis is conducted in a three-dimensional system (R, X, t). Different behavior from synchronous generators is observed because of the fault current limit. In [36], it shows that the phase distance element of zones 1 and 2 may overreach and drop out, respectively, because of an oscillating apparent impedance caused by currents injected by the IBRs. This is reinforced in [37], in that the impedances seen by distance relays outside an IBR present a problem of overreaching zones, caused by the inverter control system.
Reference [38] presents a polarization problem in an impedance relay type mho affected by the variable impedance of a WF-III or DFIG. This is caused by transient and steady-state components in the SC-current injection before reaching a stable value. Reference [39] describes some effects of WF-III on distance protection. As protection relays are not acquainted with the behavior of the generator, this leads to large variations between the phases of the fault current and voltage. Consequently, this causes a chaotic trajectory for the impedance values.
In the same line of research, reference [40] describes the presence of back-to-back converters as a predominant problem source and their effects on distance protection. It indicates that PE converters not contributing to fault current are the main problem. Meanwhile, in [41], the impact of converter in voltage source converters of high-voltage direct current (VSC-HVDC) of the distance relay coordination is described. This presents an overestimation effect on impedance measurements because of the control system, and is similar to the behavior of IBRs. In [42], it shows that effects on distance protection due to the control scheme of the VSC-HVDC connected offshore WF during an AC fault are caused by the amplitude and phase of currents controlled by the WF. In [43], the impact of a modular multi-level converter (MMC-HVDC) on distance protection is described. This is due to changes in the operation mode of the converter control reducing the range of zone 2 of the distance relay, resulting in malfunction. Finally, reference [44] shows the effects of a VSC on distance protection due to the control strategies of the converter. Thus a synchronous compensator is considered in the installation. A summary is shown in Table 6.
-
(b)
Challenges in differential protection
In [53], problems in the differential protection of TLs are described, and it indicates that the differential relay on the side of IBRs presents some challenges in line protection sensitivity, such as a starting logic and phase detection. This is due to a low influence of current penetration and the inverter control strategy, which presents different behavior in each phase of the three-phase current system as it depends on the voltage drop level of each phase. Reference [54] shows an important factor that affects differential protection, where the angular difference of the fault phasor current at the line terminals may be greater than 90° under a phase-to-phase fault but not sufficient. It concludes that the problem lies in the angular difference between the currents, as a phase–phase fault generates an angular difference of almost 180° on the network side, while remaining at almost 120° on the IBR side. This is due to control strategies during the FRT period, as seen in Table 7.
-
(iii)
Challenges in directional element protection
In [55], a real event is analyzed and problems in the directionality of an overcurrent relay are observed. In this case, a distortion in the fault signals and the change in angular differences between voltages and currents affected the ability of existing protection relays to identify the correct direction of the fault. Manufacturers use negative-sequence quantities for this method.
-
(iv)
Challenges in negative-sequence overcurrent protection
Other studies [50, 56] describe the main factors of IBRs in negative-sequence protection. Concerning the 50Q/51Q elements, the main problem affects the pickup as the negative-sequence current may be smaller than the activation threshold. Concerning the 67Q element, as in the previous case, it presents starting problems. It also shows directionality problems as the angular relationship of the negative-sequence voltage and current phasors under IBRs is modified.
In [51], problems in TL protection are described and, in particular, the use of negative-sequence quantities for detecting unbalanced faults is covered. GC considers the behavior of negative-sequence quantities in unbalanced faults [57]. The negative-sequence control capability of the DFIG is limited, whereas the fully rated converter WT is able to suppress the negative-sequence current completely. Finally, effects of IBRs on their own protection are considered, though it further involves systemic protections. Experiences in Germany are discussed [58] (Table 8).
4.2 Protection schemes with IBR integration
-
(a)
Adaptive protection schemes and modification of traditional protection
Addressing the distance protection algorithms influenced by IBRs, the most commonly used schemes are adaptive methods. In [62], a combination of conventional distance protection, voltage drop, a new directional element, and a communication-assisted method is used. In [39], a modification of a permissive overreaching transfer trip (POTT) of a tele-protection scheme is proposed, where the remote relay (grid side) uses an overreach zone based on impedance, while the WF-side relay detects the fault direction according to the properties of the current waveform. However, in [33], an improved scheme based on time delay and the zero-sequence of impedance and overcurrent signal for starting is proposed, whereas [40] proposes the mandatory use of differential protection on TL in the presence of IBRs. In [41], a new method is proposed to reset the distance protection parameters that present overreach or underreach by calculating an apparent impedance based on Zbus. An adaptive coefficient of variation is proposed in [63] to calculate the zone 2 configuration according to the fault type and the equivalent sequence impedances of WFs. Because of the large fluctuations of the FWs connected to the grid, reference [64] proposes an adaptive method for distance protection using information on the bus voltage, current, and the number of generating units connected at that time. In [51], the use of zero-sequence current generated by the power transformer that connects the IBR to the grid is proposed. In this case, it is necessary to have a grounded star connection on the grid side. Additionally, in [43], an adaptive distance relay based on the measurement information on HVDC-side common connection points is developed.
For differential protection, reference [53] develops new adaptive protection schemes taking signals from auxiliary undervoltage components for starting the differential protection logic and components with zero-sequence for phase selection. An aspect to consider in this criterion is the verification of faults in remote lines as they also produce undervoltage. Another study in [55] proposes an adaptation of a directional detection algorithm through line angle modification and positive-sequence modification in order to increase the magnitude of negative-sequence quantities, whereas [65] presents a voltage-based phase selector scheme as the adjustment using current-based phase selectors present problems under the influence of IBRs. In [66], a scheme based on reactive power flow is developed, while [67] proposes an adaptive scheme for phase selection. This method is based on the weighting of different parameters, such as current magnitude, delta current, voltage magnitude and delta voltage, impedances, and symmetric components. The above described methods are summarized in Table 9.
-
(b)
Protection schemes based on transient signals and/or artificial intelligence
In [69], a differential protection method is developed using transient current signals, which uses the Pearson correlation method of transient signals from line ends. Therefore, this correlation focuses on the similarity of the waveforms and the polarity, and is not influenced by amplitude. The method found weaknesses for long lines (> 200 km) due to the capacitive effect. Reference [70] develops a protection scheme using frequency components. A frequency spectrum of internal and external fault currents is extracted, and the calculation of an attenuation factor distinguishes the protection zones, thereby determining a threshold for those zones. This study concludes that signals generated by converters present higher noise. However, the proposed work requires many spectral analyses with very high-frequency signals so high-speed signal processing is needed.
In [71], the importance of signal processing methods for information extraction is highlighted. Many methods are presented considering use of transitory signals, based on wavelet transform (WT) of traveling waves, principal component analyses (PCAs), park transform of traveling waves, Teager energy operator (TEO), empirical decomposition in the joint mode (JM) of the traveling wave, and a mathematical morphology (MM) function. All these methods are used for transient signal extraction and require short time windows. Therefore they are less affected by the inverter control system, as these methods require the acquisition of signals at high-frequencies.
A method using artificial neural networks (ANN) is proposed in [48], where an adaptive unit, based on weight calculation for online seen impedance, for adjusting the trip characteristic of the distance relay using local information is designed. This is to avoid incorrect operation due to intermittent operation of WFs. Therefore, the set points of different zones of a distance relay must be changed simultaneously.
In [72], a scheme to detect and classify faults within a WF-III using an adaptive neuro-fuzzy inference system method is developed, while methods using machine learning for systems with high penetration of distributed generation governed by investors have also been developed. Reference [73] proposes a method of distance protection with support vector machines (SVMs). Reference [74] proposes a methodology to determine the directionality of currents in distribution feeders caused by distributed generation, based on decision trees (DTs) and SVM. The above described methods are summarized in Table 10.
5 Analysis of the literature review
Most works consider that the principal challenges emerge when the main variables used by protection relays are controlled by IBRs.
A low SC-current magnitude causes overcurrent-dependent algorithms not to be activated, e.g., overcurrent starting. In addition, the limited current may affect the measurement of fault impedance, so can influence the impedance calculation.
Inverters may force the fault current contribution to be fully balanced regardless of the type of fault. When the angle of phasor signals is controlled by IBRs, the shift angle of voltage and current in all sequence quantities for each phase (ABC) may exhibit non-traditional behavior. In addition, the electrical system behaves inductively, while the inverter control may behave as inductive, capacitive or resistive. Therefore, this may lead to errors in impedance measurements, comparison of positive- and negative-sequence shift angles, comparison of shift angles for each phase, comparison of the phasor current signals of the TL ends, and in the relationship between polarized and operational quantities.
Traditionally, negative-sequence quantities can be used as the main protection in order not to rely on zero-sequence quantities. This is a case where directional supervision for distance elements can be used to increase security. Thus, the lack of negative-sequence current by IBRs may cause the directional supervision to fail to trip and, in turn, disable the distance elements.
Figure 11a shows a summary of all the main protection functions of TLs. Each IBR characteristic affects a different algorithm, so a colored square is included to reference the correlation.

a Effects of IBR characteristics on the main protection functions. b Response time scale for the IBR operation and relays operation
Most of the cited cases present a greater emphasis and analysis on distance protection because this function and its elements are most affected by the inclusion of IBRs. The strategies most widely implemented in traditional protection schemes emphasize adaptive algorithms and the modification of traditional protection. These schemes perform impedance calculations considering the variable impedance of the IBRs and are also supported by the use of other quantities or other schemes that are not affected by IBRs, e.g.:
-
Voltage drop/undervoltage
-
Zero-sequence quantities
-
New communication assisted
-
Modification tele-protection
-
Differential protection
-
Adaptation impedance
-
Reactive power flow
-
Fast voltage and current drop
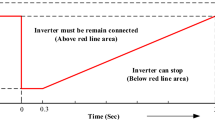
However, many require communication systems or back-up elements, resulting in high investment costs. Consequently, it may be considered that the protection functions based on phasor domain may present more and more challenges and the solution in modifying the traditional schemes could reach a point where the schemes become very complex to implement, expensive to acquire or even reduce the sensitivity of equipment. Figure 11b shows the operating time scale of the relays compared with fault response time scale of IBRs. The overlap between the two behaviors can be observed, so any change in IBRs may cause new challenges in the relays.
On the other hand, transient signal protection schemes are based on time domain and use electromagnetic transient signals. In this case, the new methods use signals at high-frequency with short time windows (ultra-fast protection) and suitable models of IBRs. The signal processing for the digital filter can be developed using the different methods described above. These emphasize immunity to the effect of IBR control. However, this method presents weaknesses such as high sensitivity to harmonics and noise, high computational requirement, hard to select the mother function, and depends on periodic signals. Moreover, artificial intelligence algorithms can use time domain and phasor domain information. These algorithms focus on the training of these parameters or machine learning, which means that they require high levels of information processing.
Consequently, the analysis of the impact of IBRs on EPS is considered a great challenge that requires research into the criteria of their operation for a systematic transformation of the current electrical network to allow high penetration of sustainable energy.
6 Conclusions
This paper described the operating characteristics of the main transmission lines protection, the challenges introduced by IBRs in these protection schemes and some possible solutions proposed by several authors. It was observed that the operational behavior, governed by the settings of its inverter power control system, and the structure of these IBRs cause such challenges affecting mainly the functions used by a distance and directional relay. In addition, the influencing factors are related to the same operating time scale, since the response times of inverter power control system coincide with the actuation times of relays. Therefore, high penetration of IBRs into transmission systems requires in-depth study of the development of new and existing protection schemes, as modification or adaptation is inevitable in the future.
On the other hand, ultra-fast protection schemes whose time scales are less than the response time of the power control system are theoretically unaffected or affected to a lesser extent. Such is the case of protection based on traveling waves. However, these methods need complementary functions which in many cases may depend on the behavior of the generation source. Therefore, for systems with high penetration of IBRs, pertinent studies are required to confirm the reliability of these schemes.
Availability of data and materials
All data used or analyzed during this study are included in the published article.
Change history
12 October 2022
The author affiliation 2 was updated
Abbreviations
- RES:
-
Renewable energy sources
- EPS:
-
Electrical power systems
- WF:
-
Wind farm
- PVP:
-
Photovoltaic plant
- PE:
-
Power electronics
- IBR:
-
Inverter-based resources
- SC:
-
Short-circuit
- TL:
-
Transmission line
- DC:
-
Direct current
- PCC:
-
Point of common coupling
- FFT:
-
Fast Fourier transform
- LCL:
-
Inverter filter LCL
- GC:
-
Grid codes
- FRT:
-
Fault ride-through
- FC:
-
Fault conditions
- ST:
-
Structure of IBRs
- CSS:
-
Control system setting of IBRs
- FSC:
-
Full-scale converter generator
- DFIG:
-
Doubly fed induction generator
- PQ:
-
Active and reactive power
- UQ:
-
Voltage and reactive power
- FIDS:
-
Fault identification selection
- FID:
-
Fault-type identification
- DT:
-
Decision trees
- EU:
-
Europe
- NA:
-
North America
- VSC:
-
Voltage source converters
- HVDC:
-
High-voltage direct current
- MMC:
-
Multi-level converter
- POTT:
-
Permissive overreaching transfer trip
- WT:
-
Wavelet transform
- PCA:
-
Principal components analyses
- TEO:
-
Teager energy operator
- JM:
-
Joint mode
- MM:
-
Mathematical morphology
- ANN:
-
Artificial neural networks
- SVM:
-
Support vector machines
References
International Energy Agency (IEA) and International Renewable Energy Agency (IRENA). (2020). The Energy Progress Report 2020. https://www.iea.org/reports/tracking-sdg7-the-energy-progress-report-2020
Blaabjerg, F., Zhe, C., & Kjaer, S. B. (2004). Power electronics as efficient interface in dispersed power generation systems. IEEE Transactions on Power Electronics, 19(5), 1184–1194. https://doi.org/10.1109/TPEL.2004.833453
Carrasco, J. M., et al. (2006). Power-electronic systems for the grid integration of renewable energy sources: A survey. IEEE Transactions on Industrial Electronics, 53(4), 1002–1016. https://doi.org/10.1109/TIE.2006.878356
Muljadi, E., Samaan, N., Gevorgian, V., Li, J., & Pasupulati, S. (2013). Different factors affecting short circuit behavior of a wind power plant. IEEE Transactions on Industry Applications, 49(1), 284–292. https://doi.org/10.1109/TIA.2012.2228831
Custer, G. (2021). Inverter protection and ride-through: Today’s photovoltaic and energy storage inverters. IEEE Electrif. Mag., 9(2), 43–49. https://doi.org/10.1109/MELE.2021.3070945
Saleh, S. A., Aljankawey, A. S., Abu-Khaizaran, M. S., & Alsayid, B. (2015). Influences of power electronic converters on voltage-current behaviors during faults in DGUs-part I: Wind energy conversion systems. IEEE Transactions on Industry Applications, 51(4), 2819–2831. https://doi.org/10.1109/TIA.2014.2387477
Saleh, S. A., Aljankawey, A. S., Alsayid, B., & Abu-Khaizaran, M. S. (2015). Influences of power electronic converters on voltage-current behaviors during faults in DGUs-part II: Photovoltaic systems. IEEE Transactions on Industry Applications, 51(4), 2832–2845. https://doi.org/10.1109/TIA.2014.2387482
Henriquez-Auba, R., Lara, J. D., Callaway, D. S., & Barrows, C. (2021). Transient simulations with a large penetration of converter-interfaced generation: Scientific computing challenges and opportunities. IEEE Electrification Magazine, 9(2), 72–82. https://doi.org/10.1109/MELE.2021.3070939
Bose, A. (2012). Renewable energy integration and the control and protection paradigms of the future. IEEE Power & Energy Society General Meeting. https://doi.org/10.1109/PESGM.2012.6345489
Chirapongsananurak, P., & Santoso, S. (2017). Multi-time-scale simulation tool for renewable energy integration analysis in distribution circuits. Inventions. https://doi.org/10.3390/INVENTIONS2020007
“P2800/D6.0. (2021). IEEE draft standard for interconnection and interoperability of inverter-based resources (IBR) interconnecting with associated transmission electric power systems.
Curzi, M., Sharma, R., & Martin, F. (2016). In fault ride through reactive current rise time requirements of various European grid codes—Analysis based on a full-converter wind turbine. Wind Energy, 19(6), 1121–1133. https://doi.org/10.1002/WE.1889
Neumann, T., Wijnhoven, T., Deconinck, G., & Erlich, I. (2015). Enhanced dynamic voltage control of type 4 wind turbines during unbalanced grid faults. IEEE Transactions on Energy Conversion, 30(4), 1650–1659. https://doi.org/10.1109/TEC.2015.2470126
Molina Zubiri, G., Lopez Barba, S., De La Fuente Del Castillo, I., & Orduñez Del Pino, M. A. (2010). Impact on the power system protection of high penetration of wind farms technology. In 43rd International conference on large high voltage electric systems 2010, CIGRE.
Walling, R. A., Gursoy, E., & English, B. (2012). Current contributions from Type 3 and Type 4 wind turbine generators during faults. In Proceedings of the IEEE Power Engineering Society Transmission and Distribution Conference. https://doi.org/10.1109/TDC.2012.6281623.
Tsili, M., & Papathanassiou, S. (2009). A review of grid code technical requirements for wind farms. IET Renewable Power Generation, 3(3), 308–332. https://doi.org/10.1049/IET-RPG.2008.0070
IEEE. (2009). IEEE application guide for IEEE Std 1547TM, IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems. In IEEE Std 1547.2–2008, no. April (pp. 1–207). https://doi.org/10.1109/IEEESTD.2008.4816078
Yong, Z., & Peiyuan, G. (2010). Review of FRT requirements for integration of wind energy in China and Europe. In Proceedings of the International conference on Electrical and Control Engineering ICECE 2010 (pp. 4177–4180) https://doi.org/10.1109/ICECE.2010.1014
Nhlapo, B., & Awodele, K. (2020). Review and comparison of the South African grid code requirements for wind generation with the European countries’ grid codes. In 2020 International SAUPEC/RobMech/PRASA Conference SAUPEC/RobMech/PRASA 2020. https://doi.org/10.1109/SAUPEC/ROBMECH/PRASA48453.2020.9041080
Popovic, D. & Wallace, I. (2010). International review of fault ride through for conventional generators (p. 112).
Villarroel-Gutierrez, H. A., & Molina, M. (2020). Analysis of dynamic voltage support schemes for PV generators implemented in Latin America. IEEE Latin America Transactions, 18(4), 641–651. https://doi.org/10.1109/TLA.2020.9082206
Lammert, G., Heß, T., Schmidt, M., Schegner, P., & Braun, M. (2014). Dynamic grid support in low voltage grids—Fault ride-through and reactive power/voltage support during grid disturbances. In Proceedings—2014 Power Systems Computation Conference PSCC 2014. https://doi.org/10.1109/PSCC.2014.7038468.
Anderson, P. M. (2010). Analysis of distance protection. Power Syst. Prot. https://doi.org/10.1109/9780470545591.CH11
IEEE. (2015). C37.113-2015—IEEE Guide for Protective Relay Applications to Transmission Lines | IEEE Standard | IEEE Xplore. In IEEE C37, vol. 2015.
Altuve Ferrer, H. J., Schweitzer, E. O., & Schweitzer Engineering Laboratories. Modern solutions for protection, control, and monitoring of electric power systems (p. 361).
Ziegler, G. (2011). Numerical distance protection: principles and applications (p. 419).
Ohura, Y., Matsuda, T., Suzuki, M., Andow, F., Kurosawa, Y., & Takeuchi, A. (1990). A digital distance relay using negative sequence current. IEEE Transactions on Power Delivery, 5(1), 79–84. https://doi.org/10.1109/61.107259
Zimmerman, K., & Costello, D. (2010). Fundamentals and improvements for directional relays. In 2010 63rd Annual Conference for Protective Relay Engineers. https://doi.org/10.1109/CPRE.2010.5469483
Horak, J. (2006). Directional overcurrent relaying (67) concepts. In 2006 59th Annual Conference for Protective Relay Engineers, vol. 2006 (pp. 164–176). https://doi.org/10.1109/CPRE.2006.1638701
Costello, D., & Zimmerman, K. (2010). Determining the faulted phase. In 2010 63rd Annual Conference for Protective Relay Engineers. https://doi.org/10.1109/CPRE.2010.5469523
Ma, J., & Wang, Z. (2018). Basic theories of power system relay protection. In Hierarchical Protection for Smart Grids. https://doi.org/10.1002/9781119304814.CH1
Hooshyar, A., Azzouz, M. A., & El-Saadany, E. F. (2015). Distance protection of lines emanating from full-scale converter-interfaced renewable energy power plants-part I: Problem statement. IEEE Transactions on Power Delivery, 30(4), 1770–1780. https://doi.org/10.1109/TPWRD.2014.2369479
Fang, Y., Jia, K., Yang, Z., Li, Y., & Bi, T. (2019). Impact of inverter-interfaced renewable energy generators on distance protection and an improved scheme. IEEE Transactions on Industrial Electronics, 66(9), 7078–7088. https://doi.org/10.1109/TIE.2018.2873521
Sarkar, M., Jia, J., & Yang, G. (2017). Distance relay performance in future converter dominated power systems. In 2017 IEEE Manchester PowerTech, Powertech 2017. https://doi.org/10.1109/PTC.2017.7981144
Nimpitiwan, N., Heydt, G. T., Ayyanar, R., & Suryanarayanan, S. (2007). Fault current contribution from synchronous machine and inverter based distributed generators. IEEE Transactions on Power Delivery, 22(1), 634–641. https://doi.org/10.1109/TPWRD.2006.881440
Chowdhury, R., & Fischer, N. (2021). Transmission line protection for systems with inverter-based resources—Part I: Problems. IEEE Transactions on Power Delivery, 36(4), 2416–2425. https://doi.org/10.1109/TPWRD.2020.3019990
Quispe, J. C., Villarroel-Gutierrez, H., & Orduna, E. (2021). Analyzing short-circuit current behavior caused by inverter-interfaced renewable energy sources. Effects on Distance Protection. https://doi.org/10.1109/tdla47668.2020.9326226
Li, Q. H., Zhang, Y. J., Yuan, W. P., & Feng, L. (2012). A study on influence of wind power on positive sequence voltage polarized impedance relay. In Proceedings—Power Engineering and Automation Conference PEAM 2012. https://doi.org/10.1109/PEAM.2012.6612485
Hooshyar, A., Azzouz, M. A., & El-Saadany, E. F. (2014). Distance protection of lines connected to induction generator-based wind farms during balanced faults. IEEE Transactions on Sustainable Energy, 5(4), 1193–1203. https://doi.org/10.1109/TSTE.2014.2336773
Alshehri, J., Khalid, M., & Alismail, F. Distance protection performance in AC power system with back-to-back converter interface. In 2019 IEEE Industry Applications Society Annual Meeting IAS IAS 2019. https://doi.org/10.1109/IAS.2019.8912433
He, L., Liu, C. C., Pitto, A., & Cirio, D. (2014). Distance protection of AC grid with HVDC-connected offshore wind generators. IEEE Transactions on Power Delivery, 29(2), 493–501. https://doi.org/10.1109/TPWRD.2013.2271761
Jia, K., Chen, R., Xuan, Z., Yang, Z., Fang, Y., & Bi, T. (2018). Fault characteristics and protection adaptability analysis in VSC-HVDC-connected offshore wind farm integration system. IET Renewable Power Generation, 12(13), 1547–1554. https://doi.org/10.1049/IET-RPG.2017.0793
Liu, Y., Li, G., Wang, H., Wang, Z., & Yu, M. (2016). Research on AC line distance relay in the presence of modular multilevel converter based HVDC. Asia Pacific Power & Energy Engineering Conference APPEEC, vol. 2016-December (pp. 1622–1626). https://doi.org/10.1109/APPEEC.2016.7779767
Jia, J., Yang, G., Nielsen, A. H., & Rønne-Hansen, P. (2019). Impact of VSC control strategies and incorporation of synchronous condensers on distance protection under unbalanced faults. IEEE Transactions on Industrial Electronics, 66(2), 1108–1118. https://doi.org/10.1109/TIE.2018.2835389
Chakeri, V., Seyedi, H., & Tarafdar Hagh, M. (2021). A new approach to transmission line pilot protection in the presence of inverter-interfaced distributed generators. IEEE Systems Journal, 15(4), 5383–5392. https://doi.org/10.1109/JSYST.2020.3041203
Khoddam, M., & Karegar, H. K. (2011) Effect of wind turbines equipped with doubly-fed induction generators on distance protection. In APAP 2011—Proceedings: 2011 International Conference on Advanced Power System Automation and Protection, vol. 2 (pp. 1349–1353). https://doi.org/10.1109/APAP.2011.6180588
De Rijcke, S., Pérez, P. S., & Driesen, J. (2010). Impact of wind turbines equipped with doubly-fed induction generators on distance relaying. In IEEE PES General Meeting PES 2010. https://doi.org/10.1109/PES.2010.5590164
Sadeghi, H. (2012). A novel method for adaptive distance protection of transmission line connected to wind farms. International Journal of Electrical Power & Energy Systems, 43(1), 1376–1382. https://doi.org/10.1016/J.IJEPES.2012.06.072
Nagpal, M., & Henville, C. (2018) BC Hydro protection interconnection practices for sources with inverter or converter interface BC hydro protection interconnection practices for sources with inverter or converter interface. In Western Protective Relay Conference.
Behnke, M. R., et al. (2020) Impact of inverter based resource negative sequence current injection on transmission system protection. https://doi.org/10.2172/1595917
Nagpal, M., & Henville, C. (2018). Impact of power-electronic sources on transmission line ground fault protection. IEEE Transactions on Power Delivery, 33(1), 62–70. https://doi.org/10.1109/TPWRD.2017.2709279
Shen, S., & Zhang, P. (2014) Characteristics of sequence impedances of DFIG wind farm and the impacts on the phase selection elements. In IEEE Power & Energy Society General Meeting, vol. 2014-October, no. October. https://doi.org/10.1109/PESGM.2014.6938876
Yang, G., et al. (2012). The influences and countermeasures of wind farm access to transmission line differential protection. In PEMWA 2012—2012 IEEE Power Electronics and Machines in Wind Applications. https://doi.org/10.1109/PEMWA.2012.6316373
Li, Y., Jia, K., Bi, T., Yan, R., Li, W., & Liu, B. (2017) Analysis of line current differential protection considering inverter-interfaced renewable energy power plants. In 2017 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe, ISGT-Europe 2017—Proceedings, vol. 2018-January (pp. 1–6). https://doi.org/10.1109/ISGTEUROPE.2017.8260157
Chen, B., Shrestha, A., Ituzaro, F. A., & Fischer, N. (2015) Addressing protection challenges associated with Type 3 and Type 4 wind turbine generators. In 2015 68th Annual Conference for Protective Relay Engineers, PRE 2015 (pp. 335–344). https://doi.org/10.1109/CPRE.2015.7102177
Haddadi, A., Zhao, M., Kocar, I., Karaagac, U., Chan, K. W., & Farantatos, E. (2021). Impact of inverter-based resources on negative sequence quantities-based protection elements. IEEE Transactions on Power Delivery, 36(1), 289–298. https://doi.org/10.1109/TPWRD.2020.2978075
Erlich, I., Neumann, T., Shewarega, F., Schegner, P., & Meyer, J. (2013). Wind turbine negative sequence current control and its effect on power system protection. IEEE Power & Energy Society General Meeting. https://doi.org/10.1109/PESMG.2013.6672880
Herrmann, H.-J., Kühn, H., Föhring, H., Ludwig, A., Oechsle, F., & Schegner, P. (2010). Impact of renewable generation on protection and disconnecting solutions—German practice and experiences. In 43rd International conference on large high voltage electric systems 2010, CIGRE 2010.
Haddadi, A., Kocar, I., Mahseredjian, J., Karaagac, U., & Farantatos, E. (2020). Performance of phase comparison line protection under inverter-based resources and impact of the german grid code. IEEE Power & Energy Society General Meeting, vol. 2020-August. https://doi.org/10.1109/PESGM41954.2020.9282027
Impact of Inverter-Based Resources on Protection Schemes Based on Negative Sequence Components. Retrieved from Oct 30, 2021, https://www.epri.com/research/products/000000003002016197
Kou, G., Jordan, J., Cockerham, B., Patterson, R., & Vansant, P. (2020). Negative-sequence current injection of transmission solar farms. IEEE Transactions on Power Delivery, 35(6), 2740–2743. https://doi.org/10.1109/TPWRD.2020.3014783
Hooshyar, A., Azzouz, M. A., & El-Saadany, E. F. (2015). Distance protection of lines emanating from full-scale converter-interfaced renewable energy power plants-part II: Solution description and evaluation. IEEE Transactions on Power Delivery, 30(4), 1781–1791. https://doi.org/10.1109/TPWRD.2014.2369480
Chen, S., Tai, N., Fan, C., Liu, J., & Hong, S. (2017). Adaptive distance protection for grounded fault of lines connected with doubly-fed induction generators. IET Generation, Transmission and Distribution, 11(6), 1513–1520. https://doi.org/10.1049/IET-GTD.2016.1145
Pradhan, A. K., & Joós, G. (2007). Adaptive distance relay setting for lines connecting wind farms. IEEE Transactions on Energy Conversion, 22(1), 206–213. https://doi.org/10.1109/TEC.2006.889621
Li, B., & Lin, M. (2011). Analysis of directional pilot protection on transmission line with wind farm integration. In APAP 2011—Proceedings: 2011 international conference on advanced power system automation and protection, vol. 1 (pp. 303–308). https://doi.org/10.1109/APAP.2011.6180418.
Janke, O. (2012) The directional reactive power undervoltage protection—A protection concept for connecting decentralized renewable energy sources. In IET Conference Publications, vol. 2012, no. 593 CP. https://doi.org/10.1049/CP.2012.0001
Blumschein, J., Dzienis, C., & Yelgin, Y. (2016) New design of distance protection for smart grid applications. In IET Conference Publications, vol. 2016, no. CP671. https://doi.org/10.1049/CP.2016.0015
Manson, S., Calero, F., & Guzman, A. (2022). Advancements in line protection for the future grid. IEEE Power Energy Mag., 20(2), 125–131. https://doi.org/10.1109/MPE.2022.3153779
Jia, K., Li, Y., Fang, Y., Zheng, L., Bi, T., & Yang, Q. (2018). Transient current similarity based protection for wind farm transmission lines. Applied Energy, 225, 42–51. https://doi.org/10.1016/J.APENERGY.2018.05.012
Chen, Z., Bo, Z. Q., & Dong, X. Z. (2005). A transient signal based protective relay in power systems with power electronic converters. In Proceedings of the IEEE power engineering society transmission and distribution conference, vol. 2005 (pp. 1–5). https://doi.org/10.1109/TDC.2005.1547161
Aftab, M. A., Hussain, S. M. S., Ali, I., & Ustun, T. S. (2020). Dynamic protection of power systems with high penetration of renewables: A review of the traveling wave based fault location techniques. International Journal of Electrical Power & Energy Systems. https://doi.org/10.1016/J.IJEPES.2019.105410
Noureldeen, O., & Hamdan, I. (2018). Design of robust intelligent protection technique for large-scale grid-connected wind farm. Protection and Control of Modern Power Systems. https://doi.org/10.1186/S41601-018-0090-4
Tasdighi, M., & Kezunovic, M. (2017). Preventing transmission distance relays maloperation under unintended bulk DG tripping using SVM-based approach. Electric Power Systems Research, 142, 258–267. https://doi.org/10.1016/J.EPSR.2016.09.024
Morales, J., Orduña, E., Villarroel, H., & Quispe, J. C. (2020). High-speed directional protection without voltage sensors for distribution feeders with distributed generation integration based on the correlation of signals and machine learning. Electric Power Systems Research. https://doi.org/10.1016/J.EPSR.2020.106295
Acknowledgements
The authors are grateful to electrical protection working group of the Institute of electrical power systems and high voltage engineering, Technical University Dresden, Germany for advice.
Funding
This work was supported in part by the German academic exchange service (DAAD) and CONICET.
Author information
Authors and Affiliations
Contributions
IBR analysis, literature survey, analysis of traditional protections, challenges of IBRs to traditional protections, discussion of solutions presented by the references. All authors read and approved the final manuscript.
Authors' information
Juan Carlos Quispe (1990-), male, Ph.D. candidate at National University of San Juan, Argentina and researcher at Universidad Tecnológica del Perú, Major in power system control and protection, and electromagnetic transients.
Eduardo Orduña (1958-), male, Ph.D. and Professor at National University of San Juan, Argentina, Major in power system control and protection.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Quispe, J.C., Orduña, E. Transmission line protection challenges influenced by inverter-based resources: a review. Prot Control Mod Power Syst 7, 28 (2022). https://doi.org/10.1186/s41601-022-00249-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s41601-022-00249-8