
Abstract
Dexterity training helps improve our motor skills while engaging in precision tasks such as surgery in the medical field and playing musical instruments. In addition, post-stroke recovery also requires extensive dexterity training to recover the original motor skills associated with the affected portion of the body. Recent years have seen a rise in the usage of soft-type actuators to perform such training, giving higher levels of comfort, compliance, portability, and adaptability. Their capabilities of performing high dexterity and safety enhancement make them specific biomedical applications and serve as a sensitive tools for physical interaction. The scope of this article discusses the soft actuator types, characterization, sensing, and control based on the interaction modes and the 5 most relevant articles that touch upon the skill improvement models and interfacing nature of the task and the precision it demands. This review attempts to report the latest developments that prioritize soft materials over hard interfaces for dexterity training and prospects of end-user satisfaction.
Similar content being viewed by others


Introduction
This review provides a systematic summary of the most recent applications of soft-actuated wearables used for dexterity training. The rest of this section consists of two parts that will serve as background information for the following areas of this review. The first part of this section focuses on briefly introducing manual dexterity. It is to be noted that most of the papers included in this review are related to recovery or improvement of hand dexterity, used components, and some disorders capable of causing an impairment that deteriorates dexterity. The second part of this section presents soft actuators, types of soft actuators currently used, and some applications.
Manual dexterity
Most activities of daily living (ADLs) demand a certain degree of manual dexterity to be successfully executed. Manual dexterity refers to the “ability to grossly handle objects using the hand” [1], which, in turn, includes the synchronization between arm, wrist, hand, and fingers to manipulate the object. This motor skill implies a combination of many factors such as reaction time, sensibility, nerve conduction, grip strength, and mobility [2]. In addition, manual dexterity relies on both the proprioceptive system to track hand movements and touch sensory systems to send information about the objects in contact with [3]. Due to the importance and impact that manual dexterity has on the quality of life, many ways of quantifying it had been developed. Two of the most common tests are the Box and Blocks Test (BBT) and the Jebsen-Taylor Test of Hand Function (JTTHF). In BBT, the patient must change one at a time, the most possible wooden cubes from one side to another in a one-minute lapse [4]. In JTTHF, the results of the hand functions evaluated are obtained by simulating seven different scenarios from activities of daily living [5].Yancosek et al. in 2009 present a detailed review of dexterity assessments in [6]. Due to the involvement of neural, muscular, and skeletal mechanisms in manual dexterity, many disorders, and diseases can lead to impairments in this ability, thereby, resulting in a reduction of the overall quality of life. Patients with multiple sclerosis are frequently affected with impaired manual dexterity [7]; individuals with diabetic peripheral neuropathy also suffer from reduced hand dexterity [8]; hand motor impairment is also a very common consequence of stroke [9]; spinal cord injury [10] also makes patients prone to suffering from manual dexterity disabilities. Treatment for recovery of manual dexterity depends on the type of impairment. However, common therapy includes assisted repetitive task practice (RTP), which is oriented to train actions that resemble those of activities of daily living and, if possible, strength training.
Emergence of soft actuators
Soft actuators are responsible for motion production in a soft robot. Soft actuators can be defined as “highly deformable materials or composites that can be activated by external stimuli to generate desired motions and forces/torques” [11]. Most of the time, bidirectional actuation is achieved by using a biologically inspired agonist–antagonist arrangement of soft actuators [12]. Soft actuators have distinctive advantages against the traditional rigid actuators in the sense that involve lower manufacturing costs, are lighter, more compliant, and more efficient in terms of power to weight ratio (PWR) [13, 14]. Regarding dexterity training, rehabilitation, and assistance purposes, soft actuators stand out by providing a broader range to support complex motions, are highly adaptable to the environment where they interact, and have a safer interaction with the user [15]. Some types of soft actuators currently used are [15]: fluid powered (either pneumatic or hydraulic), electrical motor-driven plus cable power transmission, enabled by chemical reaction, and soft actuators made from active materials. Active materials can be actuated by receiving external stimuli such as photons, thermal, magnetic, or electric field, depending on the material [14]. Some active materials used in soft actuators are shape memory alloys (SMAs), dielectric elastomers, magneto-active elastomers (MAEs), liquid crystalline elastomers (LCEs), hydrogels, and actuators made from piezoelectric materials. In recent years, soft-actuated wearables have been used to impart dexterity training, either for rehabilitation or for specialized skill development purposes. Figure 1 shows the number of publications per year considering the selected keywords and time period in this review [16]. It can be noted that the keywords ’Actuators AND Wearables’ show the sharpest upward trend over the past 5 years.

Number of publications for the searched keywords during the selected period [16]
The main contributions of this paper can be summarized as follows:
-
1
To provide a broad overview of the state-of-the-art soft-actuated wearables used for dexterity training by making an extensive search across different databases. Search methodology and selection criteria are also presented.
-
2
To report the five most relevant applications reviewed in the selected research area.
-
3
To present our findings about studies with great potential that did not fulfill all the search requirements but are related to the review topics, e.g., non-wearable devices for assistance or non-dexterity training soft wearables.
The remainder of this work is organized as follows: Methodology section determines the criteria for searching, excluding, and selecting the papers summarized in this review. The "State-of-the-art" section review for the selected period and reports the five most relevant studies at the end of the section. The "Inferences" section summarizes our findings of this review study. Finally, "Conclusion" section provides the conclusions of this review.
Materials and methods
This section reports the search methodology and selection criteria used for this review.
Search strategy
As mentioned in Fig. 1, the search keywords for this review were actuators ‘and’ haptics, actuators ‘and’ wearables, dexterity ‘and’ assist, dexterity ‘and’ simulation, dexterity ‘and’ soft wearables, and dexterity ‘and’ wearables. We covered the following databases for an extensive search: PubMed, MDPI, Google Scholar, ACM, Frontiers, Advanced Robotics, Jstage, JSME and Scientific Reports. The databases were also searched for specific names of dexterity soft wearables along with the mechanical features containing novel and basic construction level of actuators. Finally, the obtained studies were examined in order to assess additional articles to include in this review. Data such as size, gender, population, study details, analysis, and statistical outcome were extracted and entered as a matrix to provide a comprehensive overview of dexterity simulations. We have considered many metrics to define the data base classification which will be detailed in the next subsection.
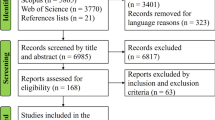
Selection criteria and PRISMA chart

Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) flow diagram. The PRISMA chart details the search and selection strategy employed during the work
As mentioned in the PRISMA chart shown in the Fig. 2, research articles are scrutinized carefully to include 88 pieces to ensure the insertion of different categories of research, as structured in this review chapter. The PRISMA chart also depicts the various inclusion and exclusion criteria followed during the screening process and they were also explained in the Table 1. The figure depicts the relevant library journal databases identifying similar research on the soft actuator development and their applications. The classification was based on the targeted disorder, types of sensors and interaction modes, wearability characteristics and VR utilization. Research related to the soft wearable simulations, and a latest trend done so far is also detailed in this review. There are several uncovered amount of data in this review, the following narrative is an overview of dexterity simulations and its statistical findings were also detailed in this review
State of the art review
This section reports the various selected papers categorized into relevant sections.
Soft actuators—types and characteristics
As the title suggests, we have intended to define a comprehensive evaluation of the several articles which utilize soft wearable fabricated with actuators for developing various dexterity training applications and soft robotics. Soft actuators are originally manufactured to reproduce biological structures that can be physically adaptive and multi-operative. Many parameters influence the development of soft actuators to enhance the performance criteria, which are more compliant in both industrial and medical/surgical applications. In this article, we have tabulated the detailed description of the vital actuators and their properties in the Table 2.
Soft actuators possess the characteristics and material properties which have been successfully used in several fields of rehabilitation and assistive devices for both lower and upper limbs. The overview of the types of actuators used in the relevant studies have been categorized from the summary.
Upper limb-based soft actuators utilized during the dexterous training
The term dexterity mainly implies the motor skill-sets obtained in the individual’s hands. Quite a few applications have been advanced to strengthen and efficiently assess the functioning of the upper limbs. This part of the soft actuator section includes a brief discussion of the soft actuators widely employed for accessing various parts of the upper extremity. Grasping is identified as a significant activity and evaluation of this motion is highly recommended as it involves independent motor control relevant to the arm motions. The extra-finger algorithm proposes an integration of bimanual tasks based on control applied with EMG signals obtained from the cap-based design. It introduces the manipulation of five tasks to stimulate the patient’s paretic limb, making it possible to sustain the available motor ability [17]. Vibrotactile feedback-based glove enhances the dexterity of four fingers in the upper arm wherein it incorporates the VR games to improve motivation during rehabilitation [18]. The soft actuator composition also covers the artificial pneumatic gel muscles (PGMs) utilized to examine the muscle loading and unloading effects for all motions of the upper limb [19]. Some research utilizes soft robots during fluoroscopy and x-ray examinations, including pneumatic flexible microactuator (FMA)-based towel or pillow controlled with different air pressures to examine the conditions of the patient’s stomach [20, 21]. A study explores discrimination levels of the fingers and wrist movements while utilizing pneumatic actuators in the form of assistive gloves. In this study, the EMG signals drive the actuators for different DOFs of hand motions where a high discrimination rate is confirmed and mutual movements of both fingers and wrist is crucial for the users with dexterity problems [22]. A similar study proposes the development of 2-DOF based multi-articulated soft robotic finger that uses PWM-PID control for actuation [23]. A controller design enhances the system dynamics for the grasping mechanism from a rigid to soft manipulations avoiding slipping of the objects [24]. The sit to stand motion enables better performance of an orthosis patient and such movement requires a system to reduces muscle activity and generates high joint torque. A group of elastic actuators were used in the form of adjustable tendons performing the recommended sit stand motion [25].
Lower limb-based soft actuators utilized during the dexterous training
Few researches address the primary cause for neurological deficits occurs mainly concerning motor and psychological factors. Neurological rehabilitative therapy focuses on the recovery of motor functions, cognitive performance, and proper working of the sensory and cardio-respiratory functions after stroke survivors. The lower limb-based dexterous applications were very few compared to the upper limb dexterous training. One study proposes the orthosis survivors rehabilitation system, especially in the ankle with the development of a soft wearable robot by Kwon et al. in 2019 [26]. The design is concerned with the bending motions of the ankle using the pneumatic artificial muscles (PAMs) to assist the dorsiflexion (DF) and plantarflexion (PF) motions. The subject showed improved gait with the use of soft actuators along with the bio-mechanics of the leg movements. The study [27] reports that the perturbations can support the evaluation of the postural control, which presents a balance exercise suit composed of PGMs. The IMUs and solenoid valves ensure the control command for the artificial muscles and prove that the exercise suit significantly affects producing disturbances.
A similar article was proposed by Bae et al. in 2018 [28] that introduces a soft exosuit that assists DF and PF for the paretic ankle. The actuator block consists of 2-DOF based driving motor unit with gear combinations. A novel control strategy was established to analyze the gait motion, including ankle movement’s peak force and motor power consumption ratio. The kinematics of ankle was well studied with better compliance and more significant potential in detecting the swing phase of the ankle motions. The electrical muscle stimulation (EMS) based feedback actuation units are more reliable and easy to see the repetitive and abstruse gait motions. Hassan et al. in 2018 [29] proposed an EMS-based actuation model integrated with the force sensing resistors (FSR) fabricated as a shoe insole. Heel stepping is one of the motions considered and shown better results in coordinating the calf muscle group.The research developed a powered orthosis using a soft actuator for body weight support on the treadmill. This study confirms the improvement in the stiffness of the hip and knee joints [30]. It is required to study the loading and unloading effects of the actuators and research proposes an experimental evaluation of the characteristics of the pneumatic actuator while developing a lower limb power suit [31].
Interaction modes and feedback types
This article focuses on soft wearables with actuators for dexterity training as one of the most common skill enhancement tools in soft robotics. Skill recovery is often integrated with an interactive environment that may involve different information exchange and assistance modes. Therefore, it is necessary to mention the most commonly observed types and feedback methods to clarify the significant soft robot actuator approaches. Considering the said period and search keywords, we have found the most frequently used feedback modes: auditory, visual, haptic, and multimodal. Figure 3 shows the main components of the skill recovery systems presented.

Main components of the skill recovery systems presented in this work
Haptic feedback
The haptic field explores the areas of touch and sensing modalities, which can be further combined with force feedback through various actuators, mainly aiding in flexion and extension motions of fingers with robotic glove-type modules [41]. A functional magnetic resonance-based wearable suit uses force cues in hand rehabilitation with task-specific exercises [37]. Hand dexterity during finger rehabilitation with the stretch strain motions of flexion and extension is proposed in the article [51] which is a form of force feedback [52]. A similar study enhances skin stretch feedback enabling error augmentation for reducing the entropy during postural control [53]. Multimodal haptic feedback in [54] was highly recommended and studied for enhancing grip force reduction in robotic surgery. The study proposes haptic feedback in the form of sensing, kinaesthetic force, vibration-based cues and the study [53] introduces force feedback with grip control. Conductive Zebra fabric (HITEK) sensor exerts haptic control and sensing in [32] while piezoresistive EeonTex LG-SPLA fabric, IMU unit (MTi-3, XSens, Netherlands) were utilized for gait detection [28] and Phantom haptic Device and four 3D cameras (3 Kinect v1 and 1 Kinect v2) in [50]. The feedback exerted from a glove fabricated with a stack of 5 flex bend sensors plays a vital role [55] and pancreas model-based force sensing calibration was introduced in [56]. Finger flexion and thumb abduction motions were studied with the actuation from soft pneumatic actuators enhancing the vibrotactile feedback [57]. The other kind of haptics mode, the electro tactile feedback obtained from the EMG electrodes to actuate the soft robotic sixth finger, was proposed in [17].
Multimodal feedback
Multimodal feedback is mainly involved in ADLs such as interaction with a virtual environment that combines auditory, visual and haptic feedback which is utilized in the articles [58] where the study is based on the bimanual coordination. The subject interacts with virtual space powered by CHAI3D with multipoint contact tools and haptic interaction was done through the same CHAI3D with a single-point contact tool called Omega 7.
-
(i)
Haptic and visual feedback: In [46], deep-sea exploration of biological organisms was done by obtaining haptic feedback from the flexible sensors in the form of discrete actuations and a camera installed inside the pressure vessel serves as visual cues for identifying the motions of deep-sea organisms. The perturbation-based dexterity was established with both visual feedback in the form of human eyes observation and force feedback applied through the force from brushed DC motors [59]. Some studies examined the coordination and independency of finger movements. Training includes modulation of grip strength by pressure sensors and glove control mechanism by flex sensors providing assistive haptic sensation. On the other hand, the therapeutic circumstances have training in augmented reality with visual illusion [60, 61]. Insoles-based studies contribute primarily to tracking motions and analyzing impact forces using pressure sensors and vibration motors and minimal use of motion tracking systems providing visual feedback [62]. Visuo-haptic feedback was introduced in [47], which is in the form of deceptions from vibrotactile actuators, and the Vive head mount display (HMD) has provided a virtual reality (VR) experience with haptic illusions.
-
(ii)
Auditory and visual feedback: Object grasping configuration using decision-making algorithm was proposed in [63] through the stereo vision systems to produce virtual 3D image and depth sensors give depth map which helps enhance the algorithm. Serious games have a significant role in improving dexterity training utilizing a virtual reality environment. Commercially available exergaming models use the leap motion controller for training patients during rehabilitation. Patients must provide perceptional feedback through questionnaires [64]. The article [65], which proposes pre-programmed gameplay for hand dexterity with different levels of assessment and gameplay dynamics, is similar to the berg balance test (BBT).
Sensors—types and use cases
Sensors allow the system to capture the values from the required parameters to control the sequence, speed, and force necessary to impart the dexterity training. For dexterity training purposes, variables such as angles between joints, force, velocity, acceleration, angular velocity, and orientation are measured.
Research to make sensors wearable devices dates back at least to the 1960 s [66]. Recent advances in the design and manufacturing of sensors made integrating many types of sensors into wearable devices possible. These advances also allowed lower prices. Sensors made for wearables must fulfill some features, including small size, lightweight, high sensibility, low power consumption, and low cost. The use of sensors in wearable devices has the advantage of capturing data from the user’s natural environment, and thus, more meaningful data for the solution of the problem [67].
Electroencephalogram (EEG), electromyogram (EMG) and capacitive sensors perform touch-related interfaces and sensing. Electrical sensors with electrode-based interfaces and optical and chemical wearable sensors for measuring vital signs [66]. Table 3 describes the most used sensors in dexterity training applications.
Sensors typically used in dexterity training systems
-
1
Inertial measurement unit (IMU) sensor: This type of sensor is usually used for motion detection and joint-angle measurement. It is comprised of an accelerometer, a gyroscope, and sometimes, a magnetometer. Once the acceleration and angular velocity data are fused, the orientation of the rigid body can be determined. Regarding wearability, it is common to use IMUs based on Microelectromechanical Systems (MEMS), which are ideal for wearable applications and precisely cost effective. The main advantage of this kind of sensor is that measurements are not affected by an external magnetic field [72]. Hence it is possible to attach it to muscles with some medical equipment that includes some ferromagnetic material. On the other hand, IMUs have the disadvantage of being prone to drift and drag: Drift is the continuous change in measurements and if the sensed target is static, it can be fixed by calibrating the sensor. Lag refers to the presence of delay in measures, whose impact will be determined by the application of the sensor. The investigation on the swing phase detection during gait enables the use of pneumatic artifical muscles (PAMs) with different stride length conditions. The study confirms the variation in the walking speed of the user with and without the use of PAMs [73].
-
2
Force sensing resistors (FSRs): Piezoresistive sensors can indirectly measure force through changes in the conductivity of the sensor’s material, which changes its resistance if stressed. Given the zone to measure in healthcare applications (big muscles or groups of muscles), more than one sensor is required to generate a measurement map. The advantages of FSRs relay in the capability of being adapted to form a sensor network, lower costs, and conditioning circuits are regularly easy to implement and robust against noise [74]. The most significant drawbacks when using this kind of sensor are: that precision could be lower, hysteresis, repeatability, non-linearity, issues, and drift are also present. The development of lower limb assistive suits is increasing to reduce muscle exertions while augmenting human motions to carry out various functions [75, 76]. Such a development process uses FSRs to detect the different phases of the gait motion. Upon detection, it enables the control to activate and deactivate the artificial muscles assisting the movements. The development of VR-based applications with AR tools has increased where a study uses negative pressure to control the fingertip force display device in virtual reality. The researchers tried to create a haptic illusion with fingers on the virtual wall while the force, motion and pressure sensor provided command signals for the valve to produce the negative pressure required. These studies could establish a better applications for finger rehabilitation [77].
-
3
Pressure sensor: Because pressure can be used to measure other variables (piezoresistance, capacitance, etc.,) indirectly, this type of sensor is widely used in many domains, ranging from refrigeration to robotics and medical devices. The principal perception mechanisms currently used for building pressure sensors are piezoresistivity, capacitance, and piezoelectricity, as well as optical and MEMS based sensors. The type of sensing principle will depend on the requirements of the product to build. Nevertheless, the flexible pressure sensor is the most common type of pressure sensor. Its high sensitivity, rapid response time, and flexibility make them ideal for many applications, including wearable applications [78]. The evaluation of the mechanical features of the soft actuators is crucial, which established an experimental verification of developing pneumatic cylinders reducing the demands for portable compressed air tanks. The researcher developed control strategies by applying four control feedback while using a pressure sensor to enhance the future ICT application [79].
VR vs non-VR scenarios
Virtual reality (VR) is a widely recommended visual feedback technology consisting of a high-end user-computer interaction that enables real-time assessments and evaluation through visual and auditory feedback. This environment creates enhanced communication with a different sense of presence, such as immersive, non-immersive, mixed, and augmented VR. In our study, we considered some exciting articles that improve dexterity skills. The model of V-Realm builder, software that produces three-dimensional (3-D) objects to increase the patient motivation for self-rehabilitative process [18]. Here the VR space creates prompts in the forms of vibration and visual cues increasing the vibrotactile and acoustic stimulation during gaming conditions. The study [80] investigates that force feedback presented with artificial muscles can improve the illusion intensity through visual needs from VR. The research incorporates VIVE PRO HMD, HTC Co., Ltd., New Taipei City, Taiwan, for detecting foot motions through trackers. The illusion created a force sensation of climbing stairs and showed significant synchronization. The assessment of lower limb parameters emphasizes a crucial soft actuator development utilizing VR for ensuring home-based rehabilitation. For instance, [81, 82] investigates the lower limb assessment through exercise-based games involving squat motions. The outcomes of the preliminary evaluation and the exergames were fed to the artificial neural network (ANN) to predict the performance accuracy to assure adaptive capabilities.
The same gaming condition was proposed with Unity-integrated Oculus and leap motion for creating an immersive virtual environment. This study ensures the detection of a collision between the virtual hand and the virtual spring rendering haptic force feedback in [83]. In the study, [68], the development of inertial measurement unit (IMUs)- based augmentation of wearable exosuit is showing good efficacy and better impact in the medical fields. Adding VR-based interaction can produce a potential resource for users to improve their dexterity skills. Some studies introduce a new technique of grasping configuration by integrating the VR to track the finger motions and create a 3D image for enhancing the robotic dexterity [44] and [63]. The degree of wearability depends on the factors of acceptance and realism in terms of augmentation. In that way, the integration of VR to move the virtual objects with gloves made of artificial muscles will enhance the muscle activity [38]. Due to the evolution of advancing haptic products, it is necessary to obtain touch sense evaluation during production. For this, the study [47] proposed haptic illusions for grasping and releasing an object by using Vive controllers as the trigger option [65]. Figure 4 shows some of the general advantages and disadvantages existing in VR systems.

General advantages and disadvantages existing in the VR systems
Inferences
This section provides overall inferences drawn from the conducted review.
Reporting 5 top relevant studies
The goal of this review paper is to create and develop a dexterity soft wearable system that helps mankind with modern technological means. Therefore, the top 5 best and most relevant studies were summarized in the Table 4. Based on this, the mode of application and design considerations so far developed will give the upcoming researchers an overview of this field to incorporate new technologies. It can also be useful in improvising the mechanisms utilized.
Wearable vs non-wearable
The most used wearable actuators comprise electrical muscle stimulation (EMS), shape memory alloy (SMA), pneumatic, piezoelectric, vibrotactile, and silicone rubber whereas non-wearable actuators that have been put to use for dexterity training include haptic interaction modules such as Phantom, SPIDAR, and other hand-held devices for both kinaesthetic and cutaneous feedback [47]. Such non-wearable modules are quite commonly used in VR environments. Only recently, sensing is also being implemented using wearable materials such as E-SKIN, conductive fabric, and so on. Full body assistive suit proposes a master and slave system together in one prototype employs pneumatic rotary actuators for assisting both upper and lower limb movements [84]. It is also necessary to learn the mechanical features of the soft robots where the research have studied the static control on the robot’s stability and confirmed the relationship between the mechanical structure and stability equivalent [85]. Similar research investigates the inspiring the animal models developing octopus shaped soft robots reducing rigidity and strong control on the degree of stiffness. This study will encourage the researchers to develop some gait control robots for challenged individuals [86]
Top 5 articles and its design approaches
The general design approach involves several stages for the development from the user needs to production. The verification and validation pathways are common methods to improve the efficiency of the system. These top 5 articles have followed design approaches that are helpful in understanding and creating further development possibilities.
Article 1 [41]: The novel PnueuNets-based actuators are designed for hand-impaired patients to perform rehabilitation exercises. In this study, kinematic and grip strength were investigated. The Graphical User Interface developed as part of this research helps to choose desired rehabilitation exercises. The unique design of this system is that it can provide a smaller bend radius and higher force output at low pressure. Also, the flexion and extension antagonism relationship for controlling the stiffness and damping parameters was suitable for bidirectional motion and actuation.
Article 2 [37]: The MR Glove prototype developed in this study is made of soft pneumatic actuators and generates motion during bending tasks and eventually actuate the finger joints upon pressure. Flexiforce A201 sensor was used to evaluate the function of the hand and fingers. Force results indicate that the device can provide 41.0 N grip force and actuate the finger joints with at least 95.4% of active range of motion. This is the first study that proposed MR-compatible soft robotic assistive for hand rehabilitation. Also, it has some additional device functionalities such as portability, lower weight, and safer human-robot interactions.
Article 3 [43]: This proposed study provides alternative fabric reinforcement soft robotics actuation techniques. The study’s results aimed to provide higher bending capability, reduced operating pressure, and compliance to multiple ranges of motion. This study also utilizes two stroke survivors’ data and the feasibility evaluation was carried out with activities of daily living (ADL) tasks. Glove-assisted grip strength reported in the study was up to 8.4± 1.8 N for 75 mm diameter and 5.8± 1.7 N for 50 mm diameter. The range of motion was 90% sufficient to carry out ADL tasks. This study demonstrates that it can perform rehabilitative therapy without voluntary muscle control.
Article 4 [28]: This preliminary study is for people in assistance during post-stroke overground walking rehabilitation programs. The actuation system was designed using a pulley cartridge limited to 2 DOF and a range of motion. This study was recorded in synchronization with Gait analysis. The gait event detection algorithm used in this study detects only paretic and non-paretic toe-offs and non-paretic mid-swings. The exosuit controller design used in the study has both high and low-level controllers to propel the actuation optimally. The results show that the soft exosuit promotes forward propulsion and ground clearance during the swing phase. At the current phase, the actuation unit can support up to 300 N as the maximum cable force and 1.4 m/s as the maximum walking speed requirement.
Article 5 [47]: TORC device is a haptic virtual reality-based controller used for sensing finger movements and also helps in virtual interaction. The design strategy involved in this study is multi-sensory integration, grasping and manipulation. The main contribution of this study is to illustrate object compliance, force and proprioception. This study involves users giving forceful, light touch experiments between normal and tangential thumb and finger movements. Also, this study’s ergonomic and hand ownership-based tasks help users feel their own hands.
Studies with high potential (include non-wearable and non-dexterity articles)
Achieving highly efficient and complex dexterity training is possible using the integration of cutting-edge sensing and actuator technologies. Therefore, in this section, we report 5 selected papers that are not directly connected with human dexterity but have high potential if applied to this field.
-
1
Soft sixth-finger [17]: Useful for individuals with a weak grasp, this modular sixth-finger weighs 3.6 g only and is attached to the user’s wrist as a bracelet. It acts as an augmentation for bimanual tasks such as unscrewing of jars, opening cans, squeezing a tube over a toothbrush and so on. This work provides prospect of enhanced dexterity when there is low hope of recovering the original skill level.
-
2
Interactive hand-pose estimation using stretch-sensor [87]: A 1.2 mm thick lightweight glove weighing 50 g comprises capacitive stretch sensor arrays for real-time hand-pose estimation. Even though further research needs to be done for efficient reproduction of such gloves, comfortable, low cost, real-time and lightweight nature of the glove makes it promising for applicability in hand dexterity training.
-
3
Wearable grasping feedback in VR [44]: Performing complex tasks with high dexterity is still challenging inside VR environments. Offering force of up to 20 N and weighing under 8 g, DextrES is a flexible and wearable haptic glove to promote dexterous manipulation of VR objects utilizing electrostatic braking. Usage of piezoactuators help increase the grasping precision of the glove.
-
4
Sensory augmentation of prosthetic limbs [32]: Procover is a smart textile solution to perform prosthetic sensing. The sensing module comprises piezoresistive, stretchable, and conductive fabric arranged in three layers. Such sensing technology can also be used for body tracking and are extremely helpful to increase confidence during training.
-
5
Wearable A-mode ultrasound finger motion recognition [88]: A lightweight A-mode ultrasound transducer could be used for dexterous motion recognition for both online and offline scenarios. Achieved offline and online accuracies were 98.83% and 95.4% respectively. Such sensing is extremely useful if the hand itself should not be disturbed by sensors.
Conclusion
This review intended to report the recent advances in the field of dexterity training, with emphasis on soft materials or soft actuators. Authors took special care to include several hidden kinds of research with high potential yet lowly cited. This review will be helpful for researchers interested in the field of medicine as well as engineering research with a focus on dexterity skill training. We have given importance to the characteristics of each reported paper such as actuator type, sensors used, user study type, and so on.
Availability of data and materials
Not applicable
Abbreviations
- ADL:
-
Activities of daily living
- BBT:
-
Box and blocks test
- JTTHF:
-
Jebsen-taylor test of hand function
- PWR:
-
Power to weight ratio
- SMA:
-
Shape memory alloy
- MAE:
-
Magneto-active elastomer
- PAM:
-
Pneumatic artificial muscle
- FSR:
-
Force sensing resistor
- EMG:
-
Electromyogram
- EEG:
-
Electroencephalogram
- EMS:
-
Electrical muscle stimulation
- DF:
-
Dorsiflexion
- PF:
-
Plantarflexion
- IMU:
-
Inertial measurement unit
- BBT:
-
Berg balance test
- DOF:
-
Degree of freedom
- ANN:
-
Artificial neural network
References
Reedman SE, Beagley S, Sakzewski L, Boyd RN (2016) The Jebsen Taylor test of hand function: a pilot test-retest reliability study in typically developing children. Phys Occup Ther Pediatr 36(3):292–304
Tian Y, Zhang H, Wang L, Ding L, Li D (2018) Effects of Eva glove on hand dexterity at low temperature and low pressure. Appl Ergon 70:98–103
Sobinov AR, Bensmaia SJ (2021) The neural mechanisms of manual dexterity. Nat Rev Neurosci 22(12):741–757. https://doi.org/10.1038/s41583-021-00528-7
Mathiowetz V, Weber K, Kashman N, Volland G (1985) Adult norms for the nine hole peg test of finger dexterity. Occup Ther J Res 5(1):24–38
Jebsen RH, Taylor N, Trieschmann RB, Trotter MJ, Howard LA (1969) An objective and standardized test of hand function. Arch Phys Med Rehabil 50(6):311–9
Yancosek KE, Howell D (2009) A narrative review of dexterity assessments. J Hand Ther 22(3):258–270
Feys, P., Lamers, I., Francis, G., Benedict, R., Phillips, G., LaRocca, N., Hudson, L.D., Rudick, R., Consortium, M.S.O.A. (2017) The nine-hole peg test as a manual dexterity performance measure for multiple sclerosis. Mult Scler J 23(5):711–720
Kelly AC, Uddin LQ, Biswal BB, Castellanos FX, Milham MP (2008) Competition between functional brain networks mediates behavioral variability. Neuroimage 39(1):527–537
Raghavan P (2007) The nature of hand motor impairment after stroke and its treatment. Curr Treat Options Cardiovasc Med 9(3):221–228
Snoek GJ, Ijzerman MJ, Hermens HJ, Maxwell D, Biering-Sorensen F (2004) Survey of the needs of patients with spinal cord injury: impact and priority for improvement in hand function in tetraplegics. Spinal Cord 42(9):526–532
Hines L, Petersen K, Lum GZ, Sitti M (2017) Soft actuators for small-scale robotics. Adv Mater 29(13):1603483
Rus D, Tolley MT (2015) Design, fabrication and control of soft robots. Nature 521(7553):467–475
Kim J, Kim JW, Kim HC, Zhai L, Ko H-U, Muthoka RM (2019) Review of soft actuator materials. Int J Precis Eng Manuf 20(12):2221–2241
El-Atab N, Mishra RB, Al-Modaf F, Joharji L, Alsharif AA, Alamoudi H, Diaz M, Qaiser N, Hussain MM (2020) Soft actuators for soft robotic applications: a review. Adv Intell Syst 2(10):2000128
Pan M, Yuan C, Liang X, Dong T, Liu T, Zhang J, Zou J, Yang H, Bowen C (2021) Soft actuators and robotic devices for rehabilitation and assistance. Adv Intell Syst. https://doi.org/10.1002/aisy.202100140
(2022) In Publications 2016-2021: "Actuators AND Haptics", "Actuators AND Wearables", "Dexterity AND Assist", "Dexterity AND Simulation", "Dexterity AND Soft Wearables", "Dexterity AND Wearables". [Online]. https://app.dimensions.ai/discover/publication
Hussain I, Salvietti G, Spagnoletti G, Prattichizzo D (2016) The soft-sixthfinger: a wearable EMG controlled robotic extra-finger for grasp compensation in chronic stroke patients. IEEE Robot Autom Lett 1(2):1000–1006
Lin C-Y, Tsai C-M, Shih P-C, Wu H-C (2016) Development of a novel haptic glove for improving finger dexterity in poststroke rehabilitation. Technol Health Care 24(s1):97–103
Das S, Kurita Y (2020) Forcearm: a wearable pneumatic gel muscle (PGM)-based assistive suit for the upper limb. IEEE Trans Med Robot Bionics 2(2):269–281
Ribuan MN, Wakimoto S, Suzumori K, Kanda T (2016) Omnidirectional soft robot platform with flexible actuators for medical assistive device. Int J Autom Technol 10(4):494–502
Iwamura M, Wakimoto S, Suzumori K, Oka H, Shibuya K, Sumi K (2014) Fundamental tests of pneumatic soft devices for pushing abdomen in stomach x-ray examination. In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), IEEE, pp 2649–2654
Sasaki D, Noritsugu T, Takaiwa M, Konishi H (2014) Control method based on EMG for power assist glove using self-organizing maps. Int J Autom Technol 8(2):177–185
Chuc NH, Vuong NHL, Kim D, Moon H, Koo JC, Lee Y, Nam J-D, Choi HR (2010) Design and control of a multi-jointed robot finger driven by an artificial muscle actuator. Adv Robot 24(14):1983–2003
Fakhari A, Keshmiri M, Kao I, Hadian Jazi S (2016) Slippage control in soft finger grasping and manipulation. Adv Robot 30(2):97–108
Scaletta T, Komada S, Oboe R (2016) Development of a human assistive robot to support hip joint movement during sit-to-stand using non-linear springs. IEEJ Trans Ind Appl 5(3):261–266
Kwon J, Park J-H, Ku S, Jeong Y, Paik N-J, Park Y-L (2019) A soft wearable robotic ankle-foot-orthosis for post-stroke patients. IEEE Robot Autom Lett 4(3):2547–2552
Ramasamy P, Hamada M, Das S, Kurita Y (2022) Human balance ability assessment through Pneumatic Gel Muscle (PGM)-based Augmentation. In: Augmented Humans 2022 (AHs 2022). Association for Computing Machinery, New York, NY, USA, pp 162–169. https://doi.org/10.1145/3519391.3519407
Bae J, Siviy C, Rouleau M, Menard N, O’Donnell K, Geliana I, Athanassiu M, Ryan D, Bibeau C, Sloot L, et al (2018) A lightweight and efficient portable soft exosuit for paretic ankle assistance in walking after stroke. In: 2018 IEEE International Conference on Robotics and Automation (ICRA), IEEE, pp 2820–2827
Hassan M, Daiber F, Wiehr F, Kosmalla F, Krüger A (2017) Footstriker: an EMS-based foot strike assistant for running. Proc ACM Interact Mob Wearable Ubiquitous Technol 1(1):1–18
Shibata Y, Miyoshi T, Yamamoto S (2010) Development of body weight support treadmill training system using pneumatic Mckibben actuator. Trans Jpn Soc Med Biol Eng 48(2):175–180
Ogawa K, Thakur C, Ikeda T, Tsuji T, Kurita Y (2017) Development of a pneumatic artificial muscle driven by low pressure and its application to the unplugged powered suit. Adv Robot 31(21):1135–1143
Leong J, Parzer P, Perteneder F, Babic T, Rendl C, Vogl A, Egger H, Olwal A, Haller M (2016) procover: sensory augmentation of prosthetic limbs using smart textile covers. In: Proceedings of the 29th Annual Symposium on User Interface Software and Technology, pp 335–346
Biggar S, Yao W (2016) Design and evaluation of a soft and wearable robotic glove for hand rehabilitation. IEEE Trans Neural Syst Rehabil Eng 24(10):1071–1080
Shafti A, Haar S, Mio R, Guilleminot P, Faisal AA (2021) Playing the piano with a robotic third thumb: assessing constraints of human augmentation. Sci Rep 11(1):1–14
Takahashi A, Brooks J, Kajimoto H, Lopes P (2021) Increasing electrical muscle stimulation’s dexterity by means of back of the hand actuation. In: Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, pp 1–12
Sentandreu-Mañó T, Tomás JM, Ricardo Salom Terrádez J (2021) A randomised clinical trial comparing 35 hz versus 50 hz frequency stimulation effects on hand motor recovery in older adults after stroke. Sci Rep 11(1):1–13
Yap HK, Kamaldin N, Lim JH, Nasrallah FA, Goh JCH, Yeow C-H (2016) A magnetic resonance compatible soft wearable robotic glove for hand rehabilitation and brain imaging. IEEE Trans Neural Syst Rehabil Eng 25(6):782–793
Das S, Kishishita Y, Tsuji T, Lowell C, Ogawa K, Kurita Y (2018) Forcehand glove: a wearable force-feedback glove with pneumatic artificial muscles (PAMS). IEEE Robot Autom Lett 3(3):2416–2423
Zhang N, Ge L, Xu H, Zhu X, Gu G (2020) 3D printed, modularized rigid-flexible integrated soft finger actuators for anthropomorphic hands. Sens Actuator A Phys 312:112090
Cheng L, Chen M, Li Z (2018) Design and control of a wearable hand rehabilitation robot. IEEE Access 6:74039–74050
Yap HK, Khin PM, Koh TH, Sun Y, Liang X, Lim JH, Yeow C-H (2017) A fully fabric-based bidirectional soft robotic glove for assistance and rehabilitation of hand impaired patients. IEEE Robot Autom Lett 2(3):1383–1390
Pece F, Zarate JJ, Vechev V, Besse N, Gudozhnik O, Shea H, Hilliges O (2017) Magtics: Flexible and thin form factor magnetic actuators for dynamic and wearable haptic feedback. In: Proceedings of the 30th Annual ACM Symposium on User Interface Software and Technology, pp 143–154
Yap HK, Lim JH, Nasrallah F, Yeow C-H (2017) Design and preliminary feasibility study of a soft robotic glove for hand function assistance in stroke survivors. Front Neurosci 11:547
Hinchet R, Vechev V, Shea H, Hilliges O (2018) Dextres: Wearable haptic feedback for grasping in VR via a thin form-factor electrostatic brake. In: Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology, pp 901–912
Mao Y, Shen M, Liu B, Xing L, Chen S, Xue X (2019) Self-powered piezoelectric-biosensing textiles for the physiological monitoring and time-motion analysis of individual sports. Sensors 19(15):3310
Phillips BT, Becker KP, Kurumaya S, Galloway KC, Whittredge G, Vogt DM, Teeple CB, Rosen MH, Pieribone VA, Gruber DF et al (2018) A dexterous, glove-based teleoperable low-power soft robotic arm for delicate deep-sea biological exploration. Sci Rep 8(1):1–9
Lee J, Sinclair M, Gonzalez-Franco M, Ofek E, Holz C (2019) Torc: a virtual reality controller for in-hand high-dexterity finger interaction. In: Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, pp 1–13
Zahedi A, Wang Y, Martinez-Hernandez U, Zhang D (2021) A wearable elbow exoskeleton for tremor suppression equipped with rotational semi-active actuator. Mech Syst Signal Process 157:107674
Zhu M, Memar AH, Gupta A, Samad M, Agarwal P, Visell Y, Keller SJ, Colonnese N (2020) Pneusleeve: In-fabric multimodal actuation and sensing in a soft, compact, and expressive haptic sleeve. In: Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, pp 1–12
González C, Solanes JE, Munoz A, Gracia L, Girbés-Juan V, Tornero J (2021) Advanced teleoperation and control system for industrial robots based on augmented virtuality and haptic feedback. J Manuf Syst 59:283–298
Yeo JC, Yap HK, Xi W, Wang Z, Yeow C-H, Lim CT (2016) Flexible and stretchable strain sensing actuator for wearable soft robotic applications. Adv Mater Technol 1(3):1600018
Goto T, Das S, Wolf K, Lopes P, Kurita Y, Kunze K (2020) Accelerating skill acquisition of two-handed drumming using pneumatic artificial muscles. In: Proceedings of the Augmented Humans International Conference, pp 1–9
de Almeida Lima KC, da Silva Borges L, Hatanaka E, Rolim LC, de Freitas PB (2017) Grip force control and hand dexterity are impaired in individuals with diabetic peripheral neuropathy. Neurosci Lett 659:54–59
Abiri A, Pensa J, Tao A, Ma J, Juo Y-Y, Askari SJ, Bisley J, Rosen J, Dutson EP, Grundfest WS (2019) Multi-modal haptic feedback for grip force reduction in robotic surgery. Sci Rep 9(1):1–10
Neng CY, Ishak MK (2021) Internet of things (iot) based flex force smart glove for physical rehabilitation. In: 2020 IEEE-EMBS Conference on Biomedical Engineering and Sciences (IECBES), IEEE, pp 276–280
Rajamani AS, Rammohan A, Mohan S, Srinivasan P, Arthanari S, Muthusamy U, Sivasubramanian V, Ravichandran P (2016) Prospective evaluation of innovative force assessing firmware in simulation to improve the technical competence of surgical trainees. World J Surg 40(4):773–778
Ge L, Chen F, Wang D, Zhang Y, Han D, Wang T, Gu G (2020) Design, modeling, and evaluation of fabric-based pneumatic actuators for soft wearable assistive gloves. Soft Robot 7(5):583–596
Yu N, Xu C, Li H, Wang K, Wang L, Liu J (2016) Fusion of haptic and gesture sensors for rehabilitation of bimanual coordination and dexterous manipulation. Sensors 16(3):395
Yoshitake Y, Ikeda A, Shinohara M (2018) Robotic finger perturbation training improves finger postural steadiness and hand dexterity. J Electromyogr Kinesiol 38:208–214
Radder B, Prange-Lasonder GB, Kottink AI, Holmberg J, Sletta K, van Dijk M, Meyer T, Melendez-Calderon A, Buurke JH, Rietman JS (2019) Home rehabilitation supported by a wearable soft-robotic device for improving hand function in older adults: a pilot randomized controlled trial. PloS One 14(8):0220544
Kim MK, Parasuraman RN, Wang L, Park Y, Kim B, Lee SJ, Lu N, Min B-C, Lee CH (2019) Soft-packaged sensory glove system for human-like natural interaction and control of prosthetic hands. NPG Asia Mater 11(1):1–12
Elvitigala DS, Matthies DJ, David L, Weerasinghe C, Nanayakkara S (2019) Gymsoles: Improving squats and dead-lifts by visualizing the user’s center of pressure. In: Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, pp 1–12
Gal I-A, Bucur D, Vladareanu L (2018) Dsmt decision-making algorithms for finding grasping configurations of robot dexterous hands. Symmetry 10(6):198
Van Beek JJ, Van Wegen EE, Bohlhalter S, Vanbellingen T (2019) Exergaming-based dexterity training in persons with Parkinson disease: a pilot feasibility study. J Neurol Phys Ther 43(3):168–174
Oña ED, García JA, Raffe W, Jardón A, Balaguer C (2019) Assessment of manual dexterity in VR: Towards a fully automated version of the box and blocks test. In: Digital health: changing the way healthcare is conceptualised and delivered, IOS Press, pp 57–62
Heikenfeld J, Jajack A, Rogers J, Gutruf P, Tian L, Pan T, Li R, Khine M, Kim J, Wang J, Kim J (2018) Wearable sensors: modalities, challenges, and prospects. Lab Chip 18(2):217–248. https://doi.org/10.1039/C7LC00914C
TarniŢă D (2016) Wearable sensors used for human gait analysis. Rom J Morphol Embryol 57(2):373–82
Lessard S, Pansodtee P, Robbins A, Trombadore JM, Kurniawan S, Teodorescu M (2018) A soft exosuit for flexible upper-extremity rehabilitation. IEEE Trans Neural Syst Rehabil Eng 26(8):1604–1617
Hur P, Pan Y-T, DeBuys C (2019) Free energy principle in human postural control system: skin stretch feedback reduces the entropy. Sci Rep 9(1):1–11
Leuenberger K, Gonzenbach R, Wachter S, Luft A, Gassert R (2017) A method to qualitatively assess arm use in stroke survivors in the home environment. Med Biol Eng Comput 55(1):141–150
Oigawa H, Musha Y, Ishimine Y, Kinjo S, Takesue Y, Negoro H, Umeda T (2021) Visualizing and evaluating finger movement using combined acceleration and contact-force sensors: a proof-of-concept study. Sensors 21(5):1918
Ahmad N, Ghazilla RAR, Khairi NM, Kasi V (2013) Reviews on various inertial measurement unit (IMU) sensor applications. Int J Signal Process Syst 1(2):256–262
Toda H, Tada M, Maruyama T, Kurita Y (2021) Optimal swing support during walking using wireless pneumatic artificial muscle driver. J Robot Mechatron 33(2):379–385
Giovanelli D, Farella E (2016) Force sensing resistor and evaluation of technology for wearable body pressure sensing. J Sens 2016:1–13
Thakur C, Ogawa K, Kurita Y (2018) Active passive nature of assistive wearable gait augment suit for enhanced mobility. J Robot Mechatron 30(5):717–728
Thakur C, Ogawa K, Tsuji T, Kurita Y (2018) Soft wearable augmented walking suit with pneumatic gel muscles and stance phase detection system to assist gait. IEEE Robot Autom Lett 3(4):4257–4264
Takaiwa M, Noritsugu T, Sasaki D, Nogami T (2014) Fingertip force displaying device using pneumatic negative pressure. Int J Autom Technol 8(2):208–215
Xu F, Li X, Shi Y, Li L, Wang W, He L, Liu R (2018) Recent developments for flexible pressure sensors: a review. Micromachines 9(11):580
Faudzi AAM, Suzumori K, Wakimoto S (2010) Development of pneumatic actuated seating system to aid chair design. In: 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, IEEE, pp 1035–1040
Okumura T, Kurita Y (2021) Cross-modal effect of presenting visual and force feedback that create the illusion of stair-climbing. Appl Sci 11(7):2987
Ramasamy P, Das S, Kurita Y (2021) Ski for squat: a squat exergame with pneumatic gel muscle-based dynamic difficulty adjustment. In: International Conference on Human-Computer Interaction, Springer, pp 449–467
Tadayon R, Sakoda W, Kurita Y (2020) Stealth-adaptive exergame design framework for elderly and rehabilitative users. In: International Conference on Human-Computer Interaction, Springer, pp 419–434
Maereg AT, Nagar A, Reid D, Secco EL (2017) Wearable vibrotactile haptic device for stiffness discrimination during virtual interactions. Front Robot AI 4:42
Yamamoto K, Hyodo K, Ishii M, Matsuo T (2002) Development of power assisting suit for assisting nurse labor. JSME Int J C Mech Syst Mach Elem Manuf 45(3):703–711
Sugimoto Y, Naniwa K, Osuka K, Sankai Y (2013) Static and dynamic properties of Mckibben pneumatic actuator for self-stability of legged-robot motion. Adv Robot 27(6):469–480
Laschi C, Cianchetti M, Mazzolai B, Margheri L, Follador M, Dario P (2012) Soft robot arm inspired by the octopus. Adv Robot 26(7):709–727
Glauser O, Wu S, Panozzo D, Hilliges O, Sorkine-Hornung O (2019) Interactive hand pose estimation using a stretch-sensing soft glove. ACM Trans Graph 38(4):1–15
Yang X, Sun X, Zhou D, Li Y, Liu H (2018) Towards wearable a-mode ultrasound sensing for real-time finger motion recognition. IEEE Trans Neural Syst Rehabil Eng 26(6):1199–1208
Acknowledgements
This work was supported by the Japan Society for the Promotion of Science (JSPS) KAKENHI (Grant Number: 22K18418).
Funding
This research receives no external funding.
Author information
Authors and Affiliations
Contributions
PR and SD prepared the conceptualization context and wrote the original draft for this research. All authors equally contributed to the literature collection, developed the key studies, review and editing. All authors read and approved the final manuscript.
Authors information
All authors with Department of System Cybernetics, Biological Engineering laboratory, Hiroshima University, Japan.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable
Consent for publication
Not applicable
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ramasamy, P., Calderon-Sastre, E., Renganathan, G. et al. Soft actuators-based skill training wearables: a review on the interaction modes, feedback types, VR scenarios, sensors utilization and applications. Robomech J 10, 1 (2023). https://doi.org/10.1186/s40648-023-00239-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40648-023-00239-x