
Abstract
Coseismic electromagnetic (EM) signals that appear from the P arrival were observed in a volcanic area during the 2016 Kumamoto earthquake. In this study, we conduct numerical simulations to explain the coseismic EM signals observed for a M5.4 aftershock of the earthquake. Initially, we adopt a water-saturated half-space model, and its simulation result for a receiver with a depth of 0.1 m suggests that the magnetic signals do not show up at the arrivals of P, refracted SV–P and Rayleigh waves because the evanescent EM waves just counterbalance the localized magnetic signals that accompany P, refracted SV–P and Rayleigh waves. Then, we conduct numerical simulations on a seven-layer half-space model in which the second layer corresponds to an aquifer analogy and the six other layers refer to air-saturated porous media. When only the electrokinetic effect is considered, the simulated coseismic magnetic signals still appear from the S arrival. The combination of electrokinetic effect and surface-charge assumption is also tested. We find that signals before the S arrival are missing on the transverse seismic, transverse electric, radial magnetic and vertical magnetic components, although the situation on horizontal magnetic components is improved to an extent. Then, we introduce an artificial scattering effect into our numerical simulations given that the scattering effect should exist in the volcanic area. New numerical result shows good agreement with the observation result on the signal appearance time. Hence, the combination of electrokinetic and scattering effects is a plausible explanation of coseismic EM signals. Further investigations indicate that coseismic electric and/or magnetic signals are more sensitive to the scattering effect and the aquifer thickness than seismic signals.

Similar content being viewed by others

Introduction
The existence of the seismo-electromagnetic phenomena has been confirmed by field observations in previous decades (Johnston and Mueller 1987; Mueller and Johnston 1990; Fujinawa et al. 2011; Han et al. 2011, 2014, 2015, 2016, 2017; Huang 2011a, b; Hattori et al. 2013; Xu et al. 2013; Fujinawa and Noda 2015; Wang and Huang 2016; Liu et al. 2017; Sakai et al. 2017). Among these phenomena, the most frequently reported is coseismic electromagnetic (EM) signals. In contrast with the direct magnetic signals that show up almost at earthquake origin time (Okubo et al. 2011), coseismic EM signals show up simultaneously with seismic arrivals (Honkura et al. 2000; Nagao et al. 2000; Skordas et al. 2000; Karakelian et al. 2002a, b; Tang et al. 2010; Matsushima et al. 2013; Tsutsui 2014; Gao et al. 2016). This phenomenon may imply some principle of the relationship between natural earthquakes and anomalous EM signals. Therefore, this phenomenon has attracted the attention of many researchers, and related theoretical studies have been conducted (Gershenzon et al. 1993; Ogawa and Utada 2000; Huang 2002; Honkura et al. 2009; Yamazaki 2012, 2013). However, the complexity of the real earth model has presented a tough challenge and the progress of theoretical studies is somewhat slow. At present, our understanding with regard to coseismic EM signals is still insufficient, and this case has limited the application of the recorded data in seismic hazard research.
A possible and widely accepted generation mechanism is the electrokinetic effect (Mizutani et al. 1976; Gershenzon et al. 1993, 2014; Johnston 1997; Fujinawa et al. 2011; Mahardika et al. 2012; Fujinawa and Noda 2015), which takes place in porous media because of the existence of the electric double layer (Frenkel 1944; Davis et al. 1978). The electrokinetic effect can result in seismic-to-EM energy conversion, which is often called seismoelectric conversion. This effect may be responsible for both coseismic and pre-seismic EM phenomena. Numerical simulation studies on the electrokinetically induced coseismic EM signals have been conducted (Hu and Gao 2011; Ren et al. 2012, 2015, 2016a, b; Zhang et al. 2013; Gershenzon et al. 2014; Huang et al. 2015) based on the seminal work of Pride (1994), who considered the electrokinetic effect and derived the governing equations for the coupled seismic and EM wave-fields in fluid-saturated porous media.
Combining the point source stacking method (Olson and Apsel 1982) and the Luco–Apsel–Chen (LAC) generalized reflection and transmission method (GRTM) (Luco and Apsel 1983; Chen 1993; Ge and Chen 2008; Ren et al. 2010a, b; Sun et al. 2019). Ren et al. (2012) developed a numerical technique to simulate seismic and EM wave-fields caused by a finite faulting in multilayer porous media. The simulation results obtained from this numerical technique support the viewpoint that the electrokinetic effect is a possible generation mechanism of coseismic EM signals (Ren et al. 2012). The numerical technique of Ren et al. (2012) was further utilized to investigate the effect of medium structure and property on the characteristics of coseismic EM signals (Zhang et al. 2013; Huang et al. 2015). In these studies (Ren et al. 2012; Zhang et al. 2013; Huang et al. 2015), coseismic EM signals are considered just localized EM fields, which refer to the local response to relative fluid-to-solid motions induced by seismic arrivals in porous media. However, this viewpoint has been changed after the work of Ren et al. (2016a), who identified the existence of evanescent EM waves that results from seismoelectric conversion occurring at a porous medium’s interface. These seismoelectric evanescent EM waves are caused by seismic waves that arrive at a porous medium’s interface with an incident angle greater than the critical angle. Their amplitudes decay rapidly when moving away from the interface. These evanescent EM waves behave as quasi-coseismic EM signals at the nearby of porous media’s interfaces (Ren et al. 2016a).
The discovery of seismoelectric evanescent EM waves has attracted the interests of seismoelectric exploration researchers. Butler et al. (2018) analyzed seismoelectric experiments data obtained in Canada several years ago and consequently identified quasi-coseismic EM signals, which were interpreted by them as the evanescent EM waves predicted by Ren et al. (2016a). They pointed out that, in retrospect, evanescent EM waves had been observed in earlier seismoelectric field trials, but not recognized correctly. The recognition of seismoelectric evanescent EM waves helps explain the origin of similar effects reported in previous studies and will contribute to improved interpretation of seismoelectric records (Butler et al. 2018). In addition, evanescent EM waves can be a new form that the electrokinetic effect may take in practical application (Dietrich et al. 2018).
Numerical simulations performed by Ren et al. (2016b) show that, even for a receiver in a solid medium where the electrokinetic effect is inoperative, coseismic (or quasi-coseismic) EM signals can also be recorded because of the evanescent EM waves that originate from the seismoelectric conversion taking place at the underground water level. Therefore, coseismic EM signals can also be contributed by seismoelectric evanescent EM waves. This idea has been recently adopted by Dzieran et al. (2019). They used an equation, which was introduced by Ren et al. (2018) to describe the amplitude decay of evanescent EM waves, to quantitatively investigate the spectral ratio of seismoelectric signals that accompany seismic waves radiated from earthquake sources.
We performed a magnetotelluric (MT) survey in the Iwo-yama area of the Kirishima volcanic group (Kyushu island, Southwest Japan) to investigate its recent volcanic activities (e.g., inflation of volcanic bodies, activation in volcanic gas eruptions and development of thermal anomalies). We set up 27 MT stations around the Iwo-yama volcano, including 7 ADU07 instruments (which are produced by Metronix Company and can record two horizontal electric components, i.e., Ex and Ey, and three magnetic components, i.e., Hx, Hy and Hz) and 20 ELOG1k instruments (which are produced by NT System Design Company and can record the two horizontal electric components, i.e., Ex and Ey). Measurements at all these MT stations started from daytime (in JST) on April 14, 2016; meanwhile the mainshock of the Kumamoto earthquake occurred at 01:25 (in JST) on April 16, 2016. The EM data were acquired until daytime (in JST) of April 28, 2016 at nearly all the stations except for 2 stations. Thus, we obtained EM signals associated with seismic waves that propagate from the Kumamoto earthquake focal areas. There also exist continuous seismic observation stations operated by ERI (Earthquake Research Institute, The University of Tokyo), JMA (Japan Meteorological Agency) and NIED (National Research Institute for Earth Science and Disaster Resilience) in the Iwo-yama area. Therefore, we can directly compare the time series of EM data with seismic signals for most earthquakes that occurred in the 2016 Kumamoto earthquake sequences. Three-dimensional (3D) inversion of the MT data obtained in the Iwo-yama area has revealed the resistivity structure, which suggests that the supply of high-temperature fluids has increased over time beneath Iwo-yama, thereby resulting in tectonic earthquakes and ground inflation (Tsukamoto et al. 2018).
In this study, we utilize the numerical technique of Ren et al. (2012) to carry out numerical simulations to explain the coseismic EM signals observed during the 2016 Kumamoto earthquakes.
Theory and method
Governing equations
Following Pride (1994), we adopt the following governing equations while the first three equations were rewritten after considering the problem to be dealt with in current study:
where u is the average solid displacement, w the average relative fluid-to-solid displacement multiplied by porosity, ω the radial frequency, ρ the bulk density, ρf the fluid density, τ the traction acting on the horizontal plane, \({\mathbf{e}}_{{\mathbf{z}}}\) the unit vector in z direction, P the pore-fluid pressure, F and f the applied body-force densities acting on the bulk material and fluid phases, respectively, E the electric field, H the magnetic field, J the electric current, ε the electrical permittivity, μ the magnetic permeability, η the fluid viscosity, KG the Gassmann’s bulk modulus, G the shear modulus. The coefficients KG, C and M can be related to the bulk modulus of the solid and fluid phases Ks and Kf and to that of the drained framework of the solid phase Kfr (Haartsen and Pride 1997).
In our numerical section, dynamic permeability kdyn, electrokinetic coupling coefficient L and electrical conductivity σ are determined as follows (cf. Haartsen and Pride 1997; Pride et al. 2004):
where k0 is the static permeability, ε0 is the electrical permittivity of vacuum; κf is the fluid permittivity; e = 1.6 × 10−19 C is the fundamental charge; RNa = 1.83 × 10−10 m and RCl = 1.20 × 10−10 m are the radiuses of ions that migrate spheres for a NaCl electrolyte. The formation factor Ff is determined by tortuosity \(\alpha_{\infty }\) and porosity ϕ as \(F_{\text{f}} = {{\alpha_{\infty } } \mathord{\left/ {\vphantom {{\alpha_{\infty } } \phi }} \right. \kern-0pt} \phi }\). The transition frequency ωt that separates the low-frequency viscous flow behavior from the high-frequency inertial flow is defined as \(\omega_{\text{t}} = {\eta \mathord{\left/ {\vphantom {\eta {\left( {\rho_{\text{f}} k_{0} F_{\text{f}} } \right)}}} \right. \kern-0pt} {\left( {\rho_{\text{f}} k_{0} F_{\text{f}} } \right)}}\). The zeta potential ζ is related to salinity C0 as \(\zeta { = }0.008{ + }0.026\log_{10} \left( {C_{0} } \right)\) (Pride and Morgan 1991).
The first three terms in the right of Eq. (1) are rewritten from the term \(\nabla \cdot {\varvec{\Gamma}}\), where \({\varvec{\Gamma}} = \left[ {K_{\text{G}} \nabla \cdot {\mathbf{u}}{ + }C\nabla \cdot {\mathbf{w}}} \right]{\mathbf{I}} + G\left[ {\nabla {\mathbf{u}} + \nabla {\mathbf{u}}^{\text{T}} - 2/3\left( {\nabla \cdot {\mathbf{u}}} \right){\mathbf{I}}} \right]\) is the bulk stress tensor that acts on both fluid and solid phases of the porous materials. Equation (2) is just rewritten on the basis of the aforementioned bulk stress tensor by considering the relation \({\varvec{\uptau}} = {\varvec{\Gamma}} \cdot {\mathbf{e}}_{{\mathbf{z}}}\). For the adopted layered model with horizontal flat interfaces, the traction that acts on a horizontal interface τ should be continuous when across the interface.
The original form of Eq. (3) is (Pride 1994):
For seismoelectric conversions where EM fields are induced by seismic waves, the term LE in the right-hand side of the above equation indicates the electro-osmotic feedback, by which the generated electric field acts on the electric double layers in the pores. As pointed out by Haines and Pride (2006), this electro-osmotic feedback can be neglected. The influence of this feedback can be estimated by considering the electric field caused by a compressional wave that propagates in a homogeneous porous medium. In this case, the conduction current just balances the streaming current so that J = 0. As such, Eqs. (5) and (11) yield
where the term \({{\eta L^{2} } \mathord{\left/ {\vphantom {{\eta L^{2} } {\left( {k_{\text{dyn}} \sigma } \right)}}} \right. \kern-0pt} {\left( {k_{\text{dyn}} \sigma } \right)}}\) represents the electro-osmotic feedback and, for the material of interest, will typically satisfy \({{\eta L^{2} } \mathord{\left/ {\vphantom {{\eta L^{2} } {\left( {k_{\text{dyn}} \sigma } \right)}}} \right. \kern-0pt} {\left( {k_{\text{dyn}} \sigma } \right)}} < 10^{ - 5}\), which can be safely neglected relative to one. This fact allows the poroelastic wave-fields to be completely decoupled from induced EM fields (Haines and Pride 2006).
For seismoelectric conversion in fluid-saturated porous media, there are four kinds of waves, i.e., fast P wave, slow P wave, S wave and EM wave. Pride and Haartsen (1996) derived the slownesses of these waves in consideration of the electro-osmotic feedback. Following them, we obtain the wave slownesses for the present case, where the electro-osmotic feedback is neglected. The fast P wave slowness spf and slow P wave slowness sps satisfy
where the minus “−” corresponds to the fast P wave, and the plus “+” corresponds to the slow P wave. Furthermore, \(H = K_{\text{G}} + {{4G} \mathord{\left/ {\vphantom {{4G} 3}} \right. \kern-0pt} 3}\), \(\tilde{\rho }{ = }{{i\eta } \mathord{\left/ {\vphantom {{i\eta } {\left( {\omega k_{\text{dyn}} } \right)}}} \right. \kern-0pt} {\left( {\omega k_{\text{dyn}} } \right)}}\) and
The S wave slowness ss is given by
and the EM wave slowness sem is given by
However, the quality factor of fast P wave or S wave, which is determined by \(Q_{{{\text{pf}},{\text{s}}}} = {{\text{Re} \left( {s_{{{\text{pf}},{\text{s}}}} } \right)} \mathord{\left/ {\vphantom {{\text{Re} \left( {s_{{{\text{pf}},{\text{s}}}} } \right)} {\left[ {2\text{Im} \left( {s_{{{\text{pf}},{\text{s}}}} } \right)} \right]}}} \right. \kern-0pt} {\left[ {2\text{Im} \left( {s_{{{\text{pf}},{\text{s}}}} } \right)} \right]}}\), will be too high. Taking pw1 material (Table 1) as an example, if a frequency range of \(f < 16\) Hz is considered, then Eqs. (13) and (15) will result in \(Q_{\text{pf}} > 8000\) and \(Q_{\text{s}} > 4900\), respectively. Such high-quality factors can hardly exist in the real earth (Press 1964). Therefore, in our numerical simulations, we consider Qpf and Qs as input parameters and calculate the slownesses of fast P wave and S wave by using approximation formulas as follows:
In our numerical section, referring to the observation over seismic wave attenuation in the earth crust (Press 1964), we set the quality factors Qpf and Qs ranging from about several tens to several hundreds. In addition, we calculate the slowness of slow P wave by using an approximation formula as follows:
Numerical simulation method
Layered porous models with horizontal interfaces are used in our numerical section. Each layer is made up of a fluid-saturated (e.g., water-saturated or air-saturated) porous medium. Reflectivity methods, such as the Kennett GRTM (Kennett and Kerry 1979; Kennett 1983; Garambois and Dietrich 2002) or the LAC GRTM (Luco and Apsel 1983; Chen 1993; Ren et al. 2010b, 2012, 2016a, b; Huang et al. 2015), are effective tools for solving wave-fields in a layered model. Martin and Thomson (1997) compared the Kennett GRTM with the LAC GRTM in detail. They observed that, the LAC GRTM is likely the key to computing the inverse of the downward transmission coefficient matrix in an unconditionally stable manner, probably because it provided more significant figures than the Kennett GRTM (Martin and Thomson 1997). The LAC GRTM has been extended to the numerical simulation of seismic waves in layered models with irregular interfaces (Chen 2007; Ge and Chen 2008). Ren et al. (2012) utilized the LAC GRTM to develop a numerical technique for simulating the propagation of electrokinetically coupled seismic and EM wave-fields in layered porous models. This numerical technique is adopted in the current work. For reader’s convenience, a brief description of this numerical technique is summarized in Appendix A.
Field observation
Among the seismic stations and 27 MT stations operating in Iwo-yama area during the 2016 Kumamoto earthquakes, the MT station IWO050 was located close to the seismic station KVO with a distance of less than 1 km. These two stations can be approximately considered as one receiver with a location of (31.9443°N, 130.8483°E). This location is marked as a red triangle in Fig. 1. At the MT station IWO050, we used Pb–PbCl2 electrodes for electric field measurement and MFS07 coils for three-component magnetic field measurement. Sampling rate was 32 Hz from 9:00 JST to 8:50 JST on the next day, and 1024 Hz in the midnight from 2:00 JST to 3:00 JST. At the seismic station KVO, three-component broadband velocity field was measured by using Trillium 120PA (Nanometrics). Sampling rate for seismic records was continuously 100 Hz.

Locations of the epicenter and observation stations KVO and IWO050. The red pentagram indicates the epicenter, whereas the red triangle indicates the seismic station KVO and the MT station IWO050
The mainshock of the Kumamoto earthquakes was a M7.3 earthquake with a focal depth of 12.45 km. Its epicenter was located at (32.7545°N, 130.7630°E). Its strike, dip and rake angles were 226.1°, 71.5° and − 157.9° (according to the Focal Mechanism Catalog provided by NIED). Coseismic EM signals were clearly observed for the mainshock. However, the seismic data were saturated. We selected a M5.4 aftershock that occurred at 01:44 (in JST) on April 16, 2016 (i.e., 19 min after the mainshock) as our research target because its hypocenter was most close to the mainshock among all the M5-class aftershocks. The observation results of this aftershock (Fig. 2) have remarkable data integrity and a high signal-to-noise ratio. The epicenter of this aftershock was located at (32.7532°N, 130.7615°E), and its focal depth is 15.16 km. The location of this aftershock’s epicenter is marked as a red pentagram in Fig. 1. The north, east and vertically downward directions are chosen to be the x-, y- and z-directions, respectively.

Seismic and EM recordings of an aftershock. This is a M5.4 aftershock occurring at 01:44 (in JST) on April 16, 2016, that is, 19 min after the mainshock of M7.3 Kumamoto earthquake. The recordings are displayed in a Cartesian and b cylindrical coordinates, respectively. The seismic and EM time series in this figure are displayed at 32 Hz sampling rate. Thus, the frequency band of the recordings is 0–16 Hz
To obtain the seismic data commensurate with the EM data, seismic records were resampled at 32 Hz after taking an anti-aliasing digital filter. Thus, the corresponding Nyquist frequency was 16 Hz. Figure 2a displays the obtained 32 Hz data of ground vibration velocity (vx, vy and vz), electric field (Ex and Ey) and magnetic induction intensity (Bx, By and Bz) in Cartesian coordinates while Fig. 2b displays the observed data in cylindrical coordinates (vr, vθ, vz, Er, Eθ, Br, Bθ, and Bz). In either the Cartesian coordinates or the cylindrical coordinates, the records indicate that coseismic EM signals existed for the whole duration time of seismic waves. The coseismic EM signals start to show up from the arrival time of P wave for all components of either electric or magnetic fields. Actually, coseismic EM signals associated with some previous natural earthquakes, like 1998 San Juan Bautista earthquake (Karakelian et al. 2002b), 1999 Hector Mine earthquake (Karakelian et al. 2002a), 2004 Parkfield earthquake (Gao et al. 2016), 2008 Wenchuan earthquake (Tang et al. 2010) and some earthquakes in Japan (Nagao et al. 2000), have already exhibited such a characteristic of showing up from the P arrival. This characteristic was also found on the coseismic EM data recorded during other aftershocks of 2016 Kumamoto earthquake. Therefore, on the basis of field observational results, we can conclude this is a commonly observed characteristic for coseismic EM signals in the real case.
A specialness for these observation data is that the MT station IWO050 and the seismic station KVO were located at nearly the due south of the epicenter. Therefore, the x- and y-components are nearly equivalent to the r- and θ-components, respectively, except that their amplitudes have a difference of minus sign. Figure 2b shows that, for the seismic signals recorded before the S arrival, the maximum amplitude of the vθ component is comparable with or probably greater than that of the vr component. We can also see the maximum amplitudes of Er and Br components are generally comparable with those of Eθ and Bθ components, respectively. Previous studies on coseismic EM signals from either field observation (Nagao et al. 2000; Karakelian et al. 2002a, b; Matsushima et al. 2002; Tang et al. 2010; Gao et al. 2016) or numerical simulation aspects (Hu and Gao 2011; Ren et al. 2012, 2015, 2016a, b; Zhang et al. 2013; Huang et al. 2015; Gao et al. 2016) have used Cartesian coordinates only. Simulation and observation results have never been compared in cylindrical coordinates. In this work, we perform such kind of comparison.
Models based on previous electrokinetic studies
To explain the observation results displayed in Fig. 2, we adopt several models based on previous electrokinetic studies and perform numerical simulations. Unfortunately, none of these models can explain the observed coseismic EM signals well, especially the recorded magnetic signals before the S arrival.
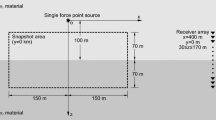
In our numerical simulations, the following configurations are adopted for all used models. The epicenter of the M5.4 aftershock is chosen to be the coordinate origin. We approximately take the distance of 1° as 100 km, and the bird view of the epicenter and receiver is set as shown in Fig. 3a. This aftershock is not a great earthquake and the epicentral distance is greater than 80 km, which is long enough. Therefore, we consider the fault as a double-couple point source. The moment released by the double-couple point source is assumed to be equal to that released by a fault with an area of 3 × 2 km2 and an averaged final slip displacement of 0.96 m. The focal depth is set as 15.16 km. The focal mechanism of this aftershock is unknown. However, since this aftershock occurred only 19 min after the mainshock and the aftershock epicenter was very close to the mainshock epicenter (the distance was about 200 m), it is generally reasonable to assume the focal mechanism of this aftershock is close to that of the mainshock. Therefore, referring to the focal mechanism of the mainshock, we set the strike, dip and rake angles of this aftershock as 234°, 72° and − 117°. The applied source time function is a Bouchon’s ramp function with shift, which can be written as
where tshift and tarise are the time shift and the arise time, respectively. They are set as tshift = 1.3 s and tarise = 0.45 s in our numerical simulations. The seismic and EM wave-fields are calculated for the frequency range of \(0 \le f \le 16\) Hz.

Source–receiver configuration and models utilized in the numerical section. a Bird view of the epicenter and receiver. b The water-saturated half-space porous model. c The seven-layer half-space model
Water-saturated half-space porous model
In the last several years, some numerical simulation studies on coseismic EM signals (Hu and Gao 2011; Ren et al. 2012, 2015; Zhang et al. 2013; Huang et al. 2015; Gao et al. 2016) have utilized the multilayer water-saturated half-space models. A trend that such model is typical and correct for the modeling of coseismic EM signals seems to exist. Therefore, we first consider a basic representative of such model, that is, a water-saturated half-space porous model (Fig. 3b) that consists of material pw1; the properties of this model can be found in Table 1. The released moment is 1.27 × 1017 N m given that the shear modulus of the pw1 material is 22.0 GPa.
We first consider a receiver with a depth of 0.1 m, which is an ordinary case in field observation. Figure 4a shows the multiple components of the simulated seismic and EM wave-fields. Three components of ground vibration velocity (vx, vy and vz), two horizontal components of electric field (Ex and Ey) and three components of magnetic induction intensity (Bx, By and Bz) are displayed. The SV wave that arrives at the ground surface with a critical angle of \(\theta_{\text{ref}} = \arcsin \left( {{{V_{\text{s}} } \mathord{\left/ {\vphantom {{V_{\text{s}} } {V_{\text{pf}} }}} \right. \kern-0pt} {V_{\text{pf}} }}} \right)\), where Vs and Vpf indicate the velocities of S and fast P waves, will generate converted P wave that propagates along the ground surface. This wave is the so-called refracted SV–P wave. It will show up after the P arrival but before the S arrival when the epicentral distance is sufficiently long. In addition, the Rayleigh wave whose velocity is slightly slower than the S wave velocity will develop well at a sufficiently long epicentral distance. Therefore, in Fig. 4a, the arrivals of P, refracted SV–P, S and Rayleigh waves are evident on the seismogram (vx, vy and vz). These arrivals can also be found on the electrogram (Ex and Ey). However, only the S arrival can be seen on the magnetogram (Bx, By and Bz). Thus, the showing up time of the coseismic magnetic signals is an evident difference between the simulation result (Fig. 4a) and the observation result (Fig. 2a). Furthermore, some weak signals show up around 3–7 s in the By component. These signals are interfacial radiation EM waves induced by nearly normal incidence of seismic waves on the porous media’s interface, that is, the free surface of this water-saturated half-space model. Such kind of interfacial radiation EM waves have been confirmed in both numerical simulation (e.g., Haartsen and Pride 1997; Garambois and Dietrich 2002) and field experiment studies (e.g., Butler et al. 2018).

Seismic and EM signals simulated for the water-saturated half-space porous model. Multiple components of a seismic and EM wave-fields and b localized and evanescent EM waves are calculated for a receiver nearby the ground surface, which is located at (− 80,890, 8680, 0.1) m
For the present case where the receiver is nearly located at the due south of the epicenter (Fig. 3a), the x- and y-components are very close to the r- and θ-components, respectively, except that the amplitudes have a difference of minus sign. Theoretically, vr component records P and SV waves, whereas vθ component records SH wave for a layered model with horizontal interface(s). Apparently, SH wave does not show up before the S arrival because P wave can generate converted P–P and P–SV waves but not converted P–SH wave. Therefore, before the S arrival, vy component, which is close to vθ component, has evidently weaker signal strength than vx component, which is close to vr component. In addition, the maximum amplitudes of Ex and Bx components are evidently greater than those of Ey and By components (Fig. 4a). Comparing Fig. 4a with Fig. 2a, we find another difference, that is, the maximum amplitude ratios of vx to vy (for those before the S arrival), Ex to Ey and Bx to By obtained from the simulation result (Fig. 4a) are several times greater than those obtained from the observation result (Fig. 2a).
As pointed out by Ren et al. (2016a), evanescent EM waves can be generated by seismoelectric conversion at a vacuum-porous interface as which the ground surface of the water-saturated half-space porous model can be considered. According to some theoretical and numerical simulation studies (Pride and Haartsen 1996; Haartsen and Pride 1997; Ren et al. 2016a, b, 2018), the simulated coseismic EM signals shown in Fig. 4a are contributed by two parts, namely, the localized EM fields that are characterized by seismic wave velocities and the evanescent EM waves with phase velocity of EM velocity. These two parts are separately calculated and shown in Fig. 4b. The vertical magnetic component theoretically can only be induced by SH wave when a horizontally layered model is used (Ren et al. 2015). Therefore, the localized and evanescent EM signals only show up for S arrival on Bz component (Fig. 4b). However, on Ex, Ey, Bx and By components, the signals that seemingly accompany P, refracted SV–P, S and Rayleigh waves exist for either the localized or evanescent EM signals. For some parts, the horizontal magnetic signals (Bx and By) seemingly accompany P, refracted SV–P and Rayleigh waves, and the localized EM signals are just counterbalanced by the evanescent EM signals. In sum, the magnetic signals only show up at the S arrival in the total fields of Bx, By and Bz components (Fig. 4a).
Still adopting the water-saturated half-space porous model, we calculate the seismic and EM wave-fields for receivers with the same lateral offsets but different depths. The lateral offsets are still set as xr = − 80,890 m and yr = 8680 m, and 4 receivers with depths zr = 0, 500, 1000 and 1500 m are considered. The simulation result is shown in Fig. 5. Bx signals shown in the gray box are amplified by a factor of 7 to improve the visibility. The seismic and EM wave-fields calculated for the receiver with the depth of zr = 0 m (red lines in Fig. 5) are almost the same as those calculated for the receiver with the depth of zr = 0.1 m (Fig. 4a). The red lines indicate that no magnetic signal shows up before the S arrival. As the receiver depth increases, the waveforms and amplitudes of seismic and EM wave-fields are more or less changed. One significant change is that Bx and By signals begin to show up at the arrivals of P, refracted SV–P and Rayleigh waves. The strengths of these magnetic signals generally become stronger for deeper receiver.

Seismic and EM signals calculated for four different receivers in the water-saturated half-space porous model. These four receivers have different depths zr = 0, 500, 1000 and 1500 m but the same lateral offset xr= − 80,890 m and yr = 8680 m. Bx signals in the gray box are amplified by a factor of 7 to improve the visibility
Figure 6 shows the localized EM fields and evanescent EM waves simulated for the four above-mentioned receivers with different depths. The signals in the gray boxes are amplified to have a better visibility. Theoretically, the localized electric field accompanies both P and S waves, whereas the localized magnetic field only accompanies S waves (Pride and Haartsen 1996). In Fig. 6a, the localized Bx and By signals before the S arrival actually are generated by the converted P–SV and refracted SV–P–SV waves. The strengths of these magnetic signals do not have significant variation. For a deeper receiver, the converted P–SV and refracted SV–P–SV waves arrive later. Therefore, the corresponding localized magnetic signals (i.e., the localized Bx and By signals before the S arrival) show evident delay of arrival time (Fig. 6a).

Comparison between a localized EM fields and b evanescent EM waves. These wave-fields are calculated for the four receivers with the same lateral offset xr = − 80,890 m and yr = 8680 m, but different depths zr = 0, 500, 1000 and 1500 m in the water-saturated half-space porous model. The signals in the gray boxes are amplified to have a better visibility
The evanescent EM waves are induced by seismic waves that arrive at the ground surface with an incident angle greater than a critical angle
where Vsei and Vem represent the seismic and EM velocities, respectively. The arrival time of the evanescent EM waves is the same as that of seismic waves at the normal projection point of the receiver onto the ground surface. The normal projection points onto the ground surface of the four receivers are identical at (80,890, 8680, 0) m, because they have the same lateral offsets. Therefore, the arrival time of the evanescent EM waves shows no variation for the four different receivers (Fig. 6b). One significant characteristic of the evanescent EM waves is the amplitude decay when moving away from the interface. Figure 6b shows this characteristic clearly. The amplitudes of the evanescent EM waves dramatically decrease for deeper receiver. For receivers at the depths of zr = 500, 1000, and 1500 m, the localized magnetic signals that accompany the converted P–SV, refracted SV–P–SV and Rayleigh waves are no longer counterbalanced by the corresponding evanescent EM waves. Therefore, the total Bx and By components show signals that seemingly accompany all seismic wave types for receivers at depths (see blue, cyan and black lines in Fig. 5).
We also test several multilayer water-saturated half-space models. The waveforms of seismic and EM wave-fields are more complicated because of the multiple reflections that occur on the interfaces. However, the magnetic signals before the S arrival are still invisible for the receiver located at or nearby the ground surface.
In field observations, the EM observation equipment is usually placed nearby the ground surface; for example, at depth less than 1 m. The observed coseismic magnetic signals always show up in the whole seismic arrival time domain (Honkura et al. 2000; Karakelian et al. 2002a, b; Tang et al. 2010; Matsushima et al. 2013; Tsutsui 2014). Thus, the behavior of the numerically simulated magnetic signals is evidently different from the field observations. This problem was first discussed by Ren et al. (2015). However, at that time, Ren et al. (2015) did not realize the existence of evanescent EM waves resulting from the seismoelectric conversion occurring at an interface of a porous medium (Ren et al. 2016a). Hence, Ren et al. (2015) did not know that the evanescent EM waves play an important role nearby the ground surface of the water-saturated half-space model. They finally proposed a surface-charge assumption that could enable the simulated horizontal magnetic signals to show up at all seismic arrivals (Ren et al. 2015). However, Ren et al. (2015) only investigated this problem in Cartesian coordinates, and the surface-charge assumption could not improve the behavior of the simulated vertical magnetic component that shows up at only the S arrival. The surface-charge assumption (Ren et al. 2015) will be further investigated in the following context.
Layered model consisting of porous media saturated by air or water
Ren et al. (2016b) conducted numerical simulations by adopting an eight-layer half-space model consisting of porous and solid materials; they found that coseismic EM signals can also be recorded by a receiver located in the top solid layer, where the electrokinetic effect is inoperative. In this case, the coseismic EM signals are contributed by the evanescent EM waves. It is different from the case of water-saturated half-space porous model, where the coseismic EM signals recorded nearby the ground surface are contributed by both the localized EM fields and the evanescent EM waves.
The multilayer water-saturated half-space models used in some previous numerical simulations of coseismic EM signals (Hu and Gao 2011; Ren et al. 2012, 2015; Zhang et al. 2013; Huang et al. 2015; Gao et al. 2016) may not fit the real case. For example, the water table is usually located underground, and the aquifer often has a finite thickness. The aquifer can be considered a water-saturated porous medium. The media above and below the aquifer probably can be treated as air-saturated porous medium. The upper medium presumably has a relatively higher porosity to allow water to pass through, whereas the lower medium likely has a relatively lower porosity to avoid infiltration. Considering the above-mentioned reason and referring to the model utilized by Ren et al. (2016b) and the conductivity (resistivity) structure obtained by Tsukamoto et al. (2018), we consider a seven-layer half-space model that consists of porous media saturated by water or air. This seven-layer half-space model is a conceptual model, and its configuration is shown in Fig. 3c. To facilitate the analysis conducted in the following context, we consider only one aquifer, that is, the second layer between the depths of 20 and 200 m. It consists of water-saturated porous material pw2 whose properties are listed in Table 1. The six other layers are made up of air-saturated porous materials pa1, pa2, pa3, pa4, pa5 and pa6, whose properties are listed in Table 2. For these air-saturated porous materials, the electrokinetic coupling coefficient is assumed to be L = 0. Given that pa5 material, where the source is located, has a shear modulus of 27.0 GPa, the released moment is 1.56 × 1017 N m. We again consider a receiver located at (− 80,890, 8680, 0.1) m.
Figure 7 shows the simulated seismic and EM wave-fields. Nonetheless, no magnetic signal shows up during the time period between P and S arrivals. Since the conductivity of earth media has a large range of variation, we also conduct numerical simulations for the seven-layer half-space model by setting different conductivity values that range from 10−4 to 0.1 S/m, which are presumably possible for the shallow earth crust. It is always found there is no visible magnetic signal during the time period between P and S arrivals. Therefore, if only the electrokinetic effect is considered, the simulation result of the seven-layer half-space model consisting of water-saturated and air-saturated porous materials shows evident difference from the observation result on the magnetic signals before the S arrival. In addition, the signal strengths of vx, Ex and Bx components are several times (about 5–10 times) stronger than those of vy, Ey and By components, respectively (Fig. 7). This result is evidently different from the observation result shown in Fig. 2a.

Seismic and EM signals simulated for the seven-layer half-space model. The receiver is located at (− 80,890, 8680, 0.1) m. Neither the surface-charge assumption nor the scattering effect is considered
Electrokinetic effect combined with surface-charge assumption
Pride and Haartsen (1996) mentioned the possibility of the interface carrying surface-charge density Qsc. They pointed out such a surface-charge density will arise because of the electrokinetic effect if a background fluid flow passes through the interface. However, such a surface-charge density is usually ignored in the numerical simulation study on the electrokinetic effect (Haartsen and Pride 1997; Ren et al. 2010a, 2010b, 2012; Zhang et al. 2013; Huang et al. 2015). Ren et al. (2015) pointed out that fluid flow across the ground surface can be induced by the condensation of water vapor near the ground surface at low temperature, the evaporation of the soil water near the ground surface at high temperature, rainfall, melting snow on ground surface, or some other causes. Thus, there is a possibility that surface-charge on ground surface can be electrokinetically induced by one kind or the combination of several kinds of fluid flows (Ren et al. 2015). When seismic waves arrive at such a precharged ground surface, an effective surface current iωn × n×uQsc (where n is the normal of the ground surface) will exist, thereby leading to the discontinuity of the horizontal magnetic components. As a result, additional EM waves will be generated by seismic waves arriving at a ground surface carrying surface-charge density. The detailed mathematical formulas for determining the generalized reflection coefficients at the ground surface for the case of considering surface-charge density, which is different from the case of surface-charge density ignored, were derived by Ren et al. (2015).
Still adopting the seven-layer half-space model (Fig. 3c), we now consider the surface-charge assumption. Referring to the estimated surface-charge density Qsc expected at the earth’s surface (Ren et al. 2015), we set a value of Qsc = − 0.02 C/m2. The simulated seismic and EM wave-fields are displayed in the Cartesian coordinates (Fig. 8a) and cylindrical coordinates (Fig. 8b), respectively. Comparing Fig. 8a with Fig. 7, we find the surface-charge density does not affect the seismic signals (vx, vy and vz components) but influence the coseismic EM signals. To some extent, it does help improve the simulation result because the signals before the S arrival begin to show up on Bx and By components (Fig. 8a). However, these signals are still missing on Bz component. Furthermore, in the simulation result displayed in cylindrical coordinates (Fig. 8b), the signals before the S arrival are missing on several components, including vθ, Eθ, Br and Bz components. However, in the observation result displayed in cylindrical coordinates (Fig. 2b), the signals on each component of seismic, electric or magnetic fields always begin to show up from the P arrival.

Seismic and EM signals recomputed for the seven-layer half-space model. The receiver is still located at (− 80,890, 8680, 0.1) m, but a surface-charge density of Qsc = − 0.02 C/m2 is considered. The simulated seismic and EM wave-fields are displayed in a Cartesian and b cylindrical coordinates, respectively
Another difference from the observation result (Fig. 2) is that the signal strength ratio of x-component to y-component or r-component to θ-component is excessively large or small. The signal strengths of vx, Ex, vr and Er components are much stronger than those of vy, Ey, vθ and Eθ components, respectively. The signal strength difference between Er and Eθ even reaches two orders of magnitude. Compared with Fig. 7, the magnetic signals shown in Fig. 8 are dramatically enhanced. The signal strengths of Bx and Br components are much weaker than those of By and Bθ components, respectively. Therefore, simulation results based on the combination of electrokinetic effect and surface-charge assumption still cannot explain the field observation well.
Electrokinetic effect combined with scattering effect
Introducing an artificial scattering effect
The simulation results in Figs. 4, 7 and 8 show that, for the signals before the S arrival, the vx component has much stronger signal strength than the vy component, which is theoretically reasonable for the adopted configuration of the epicenter and the receiver (Fig. 3a) when considering a layered model with horizontal interfaces. However, the situation in the observation result (Fig. 2) is different from the above situation. Given that the observation stations were located in a volcanic area, fairly strong heterogeneities of seismic velocity and strong topographic variations presumably exist. Scattering of primary seismic waves can be induced by both the localized volume heterogeneity and the irregular topography (Levander 1990). As predicted by theory and observed in the field, the influence of scattering effect on seismic waves includes attenuation, fluctuations, seismic wave-type conversions, and coda (Aki 1969, 1973, 1980; Aki and Chouet 1975; Wu 1982; Wu and Aki 1985). The seismic wave-type conversions include PSV-to-SH and SH-to-PSV conversions that produce energy on components where there would be none in a horizontally layered media. Therefore, the scattering effect probably has played an important role in generating the coseismic EM signals in the volcanic area.
To include the scattering effect naturally in the modeling of coseismic EM signals, we need to consider a 3D porous model with seismic velocity heterogeneities and a topographic free surface. For such a model, a power numerical technique that can solve both seismic and EM wave-fields is still to be developed. In the following numerical simulations, we attempt to bring in the PSV-to-SH and SH-to-PSV conversions in a rough and simple manner, although these seismic wave-type conversions cannot take place for the used layered model with horizontal interfaces (Fig. 3c). In this manner, a fictitious scattering effect is mandatorily introduced into our simulations. Therefore, we call it artificial scattering effect. This goal is achieved by the following three steps.
First, we assume additional PSV-to-SH and SH-to-PSV conversions occur at the ground surface. The converted seismic waves act as additional sources generating additional seismic and EM wave-fields due to the multiple reflections and transmissions on the interfaces. An artificial scattering conversion coefficient Cst is used to connect the converted seismic waves to the original seismic waves recorded at the ground surface. Expressions using the expansion coefficients are written as
where \(u_{T,m}^{{{\text{Converted}}(0)}}\) and \(u_{S,m}^{{{\text{Converted}}(0)}}\) are the expansion coefficients of the seismic waves generated at the ground surface \(z = z^{(0)} = 0\) due to the additional PSV-to-SH and SH-to-PSV conversions. The additional source term vectors \({\mathbf{b}}^{\text{AddedSHTE}} (z^{(0)} )\) and \({\mathbf{b}}^{\text{AddedPSVTM}} (z^{(0)} )\) corresponding to the additional PSV-to-SH and SH-to-PSV conversions satisfy
Once the additional source term vectors \({\mathbf{b}}^{\text{AddedSHTE}} (z^{(0)} )\) and \({\mathbf{b}}^{\text{AddedPSVTM}} (z^{(0)} )\) are determined, the LAC GRTM (Luco and Apsel 1983; Chen 1993; Ren et al. 2012) can be utilized to obtain the adjusted wave-field amplitude vectors \({\mathbf{a}}^{\text{AddedSHTE}}\) and \({\mathbf{a}}^{\text{AddedPSVTM}}\), which will be substituted into Eq. (30) to determine the expansion coefficients of the additional seismic and EM wave-fields \(u_{T,m}^{\text{Added}}\), \(u_{S,m}^{\text{Added}}\), \(u_{R,m}^{\text{Added}}\), \(E_{T,m}^{\text{Added}}\), \(E_{S,m}^{\text{Added}}\), \(H_{T,m}^{\text{Added}}\) and \(H_{S,m}^{\text{Added}}\).
Second, the original wave-fields are weakened by being multiplied with a factor of \(\sqrt {1 - C_{\text{st}}^{2} }\). Then, they are added onto the additional wave-fields. Thereafter, the expansion coefficients of the total wave-fields are given as
where A = u, E or H, and ξ = T, S or R. Substitution of these expansion coefficients into Eq. (38) provides the total seismic and EM wave-fields expressed in cylindrical coordinates \(A_{r}^{\text{Total}}\), \(A_{\theta }^{\text{Total}}\) and \(A_{z}^{\text{Total}}\). Equations (21)–(25) are in the frequency–wavenumber domain.
Third, in addition to the seismic waves directly from the source, there should be some contributions from other directions due to the scattering effect. This may be the reason why the observation result shows that the signal strength of vy (or vθ) component is comparable with or even stronger than that of vx (or vr) component at the part before the S arrival (Fig. 2). We roughly consider this effect by rotating the horizontal components of the total wave-fields with an angle of θrot. Thus the finally obtained wave-fields are calculated as follows:
where A = u, E or H. These wave-fields expressed in cylindrical coordinates can be easily converted into Cartesian coordinates \(A_{x}^{\text{Final}}\), \(A_{y}^{\text{Final}}\) and \(A_{z}^{\text{Final}}\).
Although the scattering effect introduced in the above is artificial and special, we can utilize it to investigate the possible influence of the scattering effect on the coseismic EM signals.
New numerical simulation results
Then, numerical simulations are carried out on the seven-layer half-space model (Fig. 3c) by considering the artificial scattering effect described in the above. We test different artificial scattering conversion coefficients as well as different horizontal wave-field rotation angles.
Figure 9 shows the simulated seismic and EM wave-fields when an artificial scattering conversion coefficient Cst = 0.6 and a horizontal wave-field rotation angle of 30° in the counterclockwise direction are considered. The simulation result displayed in Cartesian coordinates (Fig. 9a) shows that the coseismic magnetic signals before the S arrival show up on all the three magnetic components Bx, By and Bz. This is a significant change making the behavior of the simulated coseismic magnetic signals in better accordance with the observation result. All the simulation results in Figs. 4a, 7 and 8 cannot explain well the observation result, especially the behavior of the coseismic Bz component which starts to show up from the P arrival (Fig. 2). Ren et al. (2015) suggested that the scattering effect probably can make the simulated coseismic Bz component behave close to the observation result. This viewpoint is now verified by our simulation result (Fig. 9a). Further checking the simulation result in cylindrical coordinates (Fig. 9b), we find that, for the time period between P and S arrivals, evident signals exhibit on all the components of seismic, electric and magnetic wave-fields (except the vertical electric component which is usually not considered). The signal strength level of every component of seismic, electric, and magnetic wave-fields shown by Fig. 9 is generally close to that shown by Fig. 2. Hence, the signal strength ratio of x- to y-component or r- to θ-component also agrees with the observation result in a better way.

Seismic and EM signals obtained by considering an artificial scattering effect. Once again, we consider the seven-layer half-space model and a receiver located at (− 80,890, 8680, 0.1) m. An artificial scattering effect is introduced by employing an artificial scattering conversion coefficient of Cst = 0.6 and a horizontal wave-field rotation angle of 30° in the counterclockwise direction. The simulated seismic and EM wave-fields are displayed in a Cartesian and b cylindrical coordinates, respectively
Generally speaking, regarding the general characteristics of the observation result, such as the signal showing up time and the signal strength ratio of x- to y-component or r- to θ-component, the simulation result of the scattering effect (Fig. 9) apparently shows a better agreement with the observation result (Fig. 2) than those displayed in Figs. 4a, 7 and 8. However, one difference still lies between the simulation and observation results. In the simulation result (Fig. 9), the signal strength level of Bz component is close to that of Bx or By component. However, in the observation result (Fig. 2), the Bz component has a signal strength level about 5 times higher than that of Bx or By component. One possible explanation is that the observation instrument may have tilted while being placed or after the occurrence of the foreshock or mainshock. The landform of the observation area presumably is complicated and has not been taken into account in our numerical simulation. At present, the influence of landform (topographic) variation on coseismic EM signals is unknown. Hence, numerical simulation studies on 3D models with the presence of landforms can be a future work. These studies may provide more comprehensive understanding to the general characteristics of coseismic EM signals.
The seismic and EM wave-fields displayed in Fig. 9 are contributed by two parts, namely, the weakened original wave-fields and the additional wave-fields resulting from the PSV-to-SH and SH-to-PSV conversions. These additional wave-fields before applying the horizontal wave-field rotation are also displayed in Cartesian (Fig. 10a) and cylindrical coordinates (Fig. 10b), respectively. The wave-fields caused by PSV-to-SH conversion can be easily differentiated from those caused by SH-to-PSV conversion in cylindrical coordinates. The vθ, Eθ, Br and Bz components belong to the SHTE model. Hence, they are caused by the PSV-to-SH conversion, and they start to show up from the P arrival. The vr, vz, Er and Bθ components belong to the PSVTM model. Thus, they are caused by SH-to-PSV conversion. Since some parts of the SH wave are artificially converted into P and SV waves and a horizontally layered model is adopted, refracted P wave propagating along the ground surface can be generated by SH wave arriving at the ground surface with an incident angle of \(\theta_{\text{ref}} = \arcsin \left( {{{V_{\text{s}} } \mathord{\left/ {\vphantom {{V_{\text{s}} } {V_{\text{pf}} }}} \right. \kern-0pt} {V_{\text{pf}} }}} \right)\). This refracted P wave show up earlier than the S arrival due to the sufficiently long epicentral distance. Therefore, the vr, vz, Er and Bθ components start to show up later than the P arrival but earlier than the S arrival. The weak signals that show up around 6–14 s in the Bθ component (Fig. 10b) are interfacial radiation EM waves (Haartsen and Pride 1997; Garambois and Dietrich 2002; Butler et al. 2018). Their signal strengths are generally below the level of 0.0001 nT. Thus, they can be too weak to be observed in the real case.

Additional seismic and EM wave-fields resulting from the artificial scattering effect. We consider the seven-layer half-space model, the receiver located at (− 80,890, 8680, 0.1) m and an artificial scattering effect with an artificial scattering conversion coefficient of Cst = 0.6. These are the wave-fields before applying the horizontal wave-field rotation. They are caused by PSV-to-SH and SH-to-PSV conversions
Influences of C st and aquifer thickness on coseismic EM signals
The simulated coseismic EM signals in Fig. 9 are contributed by evanescent EM waves, whose sensitivity to media properties was numerically investigated by Ren et al. (2016b). They found that the evanescent EM waves are sensitive to some media properties, such as porosity, salinity and fluid viscosity. Therefore, we can infer that these media properties should evidently affect the coseismic EM signals shown in Fig. 9. In the following context, we investigate two others factors that were not considered by Ren et al. (2016b): artificial scattering conversion coefficient, which is proposed in the current work, and aquifer thickness.
We conduct numerical simulations on the seven-layer half-space model by adopting artificial scattering conversion coefficient Cst with different values of 0, 0.2, 0.4, 0.6 and 0.8 to investigate the variations of seismic and EM wave-field amplitudes. Figure 11 shows the absolute amplitudes of seismic and EM wave-fields simulated for the receiver located at (-80,890, 8680, 0.1) m. The vh, Eh and Bh components are the horizontal total components of seismic, electric and magnetic signals, respectively, while the vz and Bz components are the vertical components of seismic and magnetic signals, respectively. For all the components shown in Fig. 11, the signals before and after the time of t = 27 s are separately displayed because their signal strength levels are different. The influence of the artificial scattering conversion coefficient on the coseismic magnetic signals is most significant. The strengths of the coseismic magnetic signals dramatically increase for higher values of Cst. This variation trend has a good agreement on all the coseismic magnetic signals showing up at different times. Hence, the coseismic magnetic signals observed during earthquakes may have some information on the scattering effect in the observation area. The strengths of the coseismic electric signals generally decrease for higher values of Cst. However, the variation extent of the coseismic electric signals is less dramatic than that of the coseismic magnetic signals. In additions, for some time periods, such as nearby t = 26.7 or 34.5 s, the strengths of the coseismic electric signals seem to show increase variation trend for higher values of Cst. For seismic signals, the strength variation extent is also less dramatic than that of the coseismic magnetic signals, and a consistent variation trend is not apparent.

Influence of scattering effect on the amplitudes of seismic and EM wave-fields. We calculate the absolute amplitudes of horizontal total components and vertical components of the seismic and EM wave-fields simulated for the receiver located at (− 80,890, 8680, 0.1) m in the seven-layer half-space model when different artificial scattering conversion coefficients Cst = 0, 0.2, 0.4, 0.6 and 0.8 are adopted
The influence of the aquifer thickness on the coseismic EM signals is investigated by performing numerical simulation on a modified seven-layer half-space model wherein the thickness of the aquifer (which is the second layer consisting of water-saturated porous material) is modified and the thicknesses of other layers are unchanged. An artificial scattering conversion coefficient of Cst = 0.6 is adopted. Figure 12 shows the absolute amplitudes of horizontal total components and vertical components of the seismic and EM wave-fields when the aquifer thickness h is set to be 30, 80, 130, 180 or 230 m. Again, the signals before and after the time of t = 27 s are separately displayed due to their different signal strength levels. All the seismic, electric and magnetic signals are affected by the aquifer thickness. However, the variations of seismic signals are less dramatic than those of electric or magnetic signals. Either the electric or magnetic signals show a general variation trend of stronger signal strength for thicker aquifer. This result can be understood as follows. For the used seven-layer half-space model, the coseismic EM signals recorded by the receiver nearby the ground surface are contributed by two parts of evanescent EM waves, which originate from the seismoelectric conversions taking place at the aquifer’s upper and lower interfaces. These two parts of evanescent EM waves trend to counterbalance one another. However, they have different amplitude decay extents because the aquifer’s upper and lower interfaces apparently are located at different depths. When the aquifer is thicker, which means the aquifer’s lower interface is located at a deeper depth, the evanescent EM waves originating from the aquifer’s lower interface exhibit more amplitude decay and thereby have a lower signal strength level. Consequently, they counterbalance a less portion of the evanescent EM waves originating from the aquifer’s upper interface. Thus, the coseismic EM signals contributed by these two parts of evanescent EM waves finally show a higher signal strength level. An opposite situation, that is, coseismic EM signals with a lower strength level, occurs when the aquifer is thinner. The simulation result displayed in Fig. 12 suggests that the coseismic EM signals are more sensitive to the aquifer thickness than the seismic waves.

Influence of aquifer thickness on the amplitudes of seismic and EM wave-fields. We calculate the absolute amplitudes of horizontal total components and vertical components of the seismic and EM wave-fields simulated for the receiver located at (− 80,890, 8680, 0.1) m in the (modified) seven-layer half-space models, where the aquifer thickness is set to be h = 30, 80, 130, 180 or 230 m, respectively. The artificial scattering effect is considered, and the artificial scattering conversion coefficient is set as Cst = 0.6
Discussion
The scattering effect is added into our numerical simulations in a simple, rough and mandatory manner. On this basis, we use the term “artificial scattering effect”. Although it cannot lead to precise results, PSV-to-SH and SH-to-PSV conversions, which exist due to the scattering effect, can now be included in our numerical simulations, and the simulation results can fit the observation data better, especially for the coseismic magnetic signals. Therefore, we can arrive at a preliminary conclusion that the scattering effect probably plays an important role in generating coseismic EM signals. However, we still need further work for a grounded conclusion. Further efforts to simulate coseismic EM signals by strictly considering the scattering effect may be significant to the proper understanding of coseismic EM phenomena. One potential tool for such kind of simulation is the curvilinear grid finite-difference method, which has been recently applied to solve the governing equation of poroelastic waves in porous media for 2D case (Sun et al. 2019). One advantage of this method is that it can well fit non-planar interfaces, such as a topographic free surface which the ground surface of the Iwo-yama volcanic area can be considered. This method can handle the scattering effect strictly and naturally and generate precise numerical results. Applying this method to model the seismic and EM signals in 3D porous media by solving the governing equations of Pride’s theory (Pride 1994) can be a future work.
In addition to electrokinetic effect, some other mechanisms may also contribute to coseismic EM signals. The motional induction effect, which was once called the seismic dynamo effect (Honkura et al. 2000; Matsushima et al. 2002), assumes the electrically conducting crust vibrating under the earth’s magnetic field can cause motional EM induction. It has been taken as a possible generation mechanism of coseismic EM signals (Honkura et al. 2000; Matsushima et al. 2002; Yamazaki 2012). Recently, Gao et al. (2019) modeled such effect for a 2D layered model. Although coseismic magnetic signals appearing at the arrival time of both P and S waves were obtained for a receiver located nearby the ground surface, the signal strengths of the simulated magnetic induction intensity are generally at the level of 10−4–10−7 nT (Gao et al. 2019). Such weak magnetic signal can be hardly recorded in the presence of magnetic noise in real situations. Given that Gao et al. (2019) only considered 2D case, whether the motional induction effect can generate observable coseismic magnetic signals in the 3D case can be a future work deserving further efforts. Jiang et al. (2018) showed that the rotation-induced magnetic field in a coil magnetometer by seismic waves can contribute to the recorded coseismic magnetic signals. Such kind of magnetic signals probably should be removed from the data to eliminate instrumental response and to obtain the real coseismic magnetic signals.
Conclusions
Coseismic EM signals were recorded by the observation stations located in Iwo-yama area during the 2016 Kumamoto earthquake. A M5.4 aftershock which occurred about 19 min after the mainshock is chosen as our research target. The observation result suggests that the coseismic EM signals started to show up from the arrival time of P wave and existed for the whole duration time of seismic waves. This is a general characteristic which also has been shown by coseismic EM signals observed for other natural earthquakes (Nagao et al. 2000; Karakelian et al. 2002a, b; Matsushima et al. 2002; Tang et al. 2010; Gao et al. 2016). In this work, we try to explain the coseismic EM signals observed for the M5.4 aftershock by conducting numerical simulations on several different models.
At first, we adopt a water-saturated half-space porous model (Fig. 3b). The simulation result for a receiver located at (− 80,890, 8680, 0.1) m shows that the arrivals of P, refracted SV–P, S and Rayleigh waves can be found on either seismic or electric signals, whereas only the arrival of S wave can be found on magnetic signals (Fig. 4a). Further investigation shows that the coseismic EM signals actually are contributed by two parts, that is, the localized EM fields and evanescent EM waves. For the Bx and By components, the signals synchronous with P, refracted SV–P and Rayleigh waves also exist on the localized fields as well as the evanescent waves, but they just counterbalance one another (Fig. 4b). Thus, they are missing on the total Bx and By components (Fig. 4a). However, due to the amplitude decay of the evanescent EM waves (Fig. 6), the coseismic magnetic signals synchronous with P, refracted SV–P and Rayleigh waves can show up again for a receiver located at a deep depth such as 0.5 km (Fig. 5). The Bz component only shows coseismic signals synchronous with S arrival whether the receiver is located nearby the ground surface or at depths (Figs. 4, 5 and 6), because it is theoretically only induced by SH waves for a horizontally layered model (Ren et al. 2015). Then, numerical simulations are performed on a seven-layer half-space model (Fig. 3c) which is a conceptual model. The second layer consisting of water-saturated porous material is an analogy of aquifer. The other six layers, where the electrokinetic effect is inoperative, are made up of air-saturated porous material. The simulation result in Fig. 7 shows that the coseismic magnetic signals before the S arrival are still missing on Bx, By and Bz components when only the electrokinetic effect is considered. Thereafter, we test the surface-charge assumption (Ren et al. 2015) on the seven-layer half-space model. To some extent, the simulation result becomes close to the observation result because the signals between the P and S arrivals start to show up on Bx and By components. However, these signals are missing on vθ, Eθ, Br and Bz components (Fig. 8). The simulation results in Figs. 4, 7 and 8 all fail to explain well the observation result (Fig. 2), because the showing up time of coseismic magnetic signals significantly differs from the observation. Another difference is the signal strength ratio of x- to y- (or r- to θ-) component. Except for the magnetic signals simulated for the surface-charge assumption, the simulation results in Figs. 4, 7 and 8 generally have a higher ratio than the observation result.
The observation stations were located in a volcanic area. Therefore, the scattering effect probably played an important role in generating coseismic EM signals. On this basis, we introduce an artificial scattering effect into our numerical simulations to investigate its possible influence on coseismic EM signals. The new simulation result on the seven-layer half-space model with the artificial scattering effect agrees well with the observation result on both the signal’s showing up time and the signal strength ratio of x- to y- (or r- to θ-) component (Fig. 9). Thus, the combination of electrokinetic effect and scattering effect may be a reasonable explanation to the coseismic EM signals observed during natural earthquakes. The influences of the artificial scattering conversion coefficient and the aquifer thickness on coseismic EM signals are further investigated (Figs. 11 and 12). The strengths of coseismic magnetic signals are dramatically enhanced for higher values of artificial scattering conversion coefficients, and the coseismic EM signals show higher strength levels for a thicker aquifer. Coseismic electric and/or magnetic signals are more sensitive to the artificial scattering conversion coefficient and the aquifer thickness than seismic signals. Thus, the EM observation can provide some information on the earth media, which the seismic observation can hardly provide.
Availability of data and materials
The field observation data shown in this article are available from ERI. The numerical simulation data are available from Dr. Hengxin Ren (renhx@sustech.edu.cn).
Abbreviations
- EM:
-
electromagnetic
- LAC:
-
Luco–Apsel–Chen
- GRTM:
-
generalized reflection and transmission method
- MT:
-
magnetotelluric
- ERI:
-
Earthquake Research Institute
- JMA:
-
Japan Meteorological Agency
- NIED:
-
National Research Institute for Earth Science and Disaster Resilience
References
Aki K (1969) Analysis of seismic coda of local earthquakes as scattered waves. J Geophys Res 74:615–631
Aki K (1973) Scattering of P waves under the Montana LASA. J Geophys Res 78:1334–1346
Aki K (1980) Scattering and attenuation of shear waves in the lithosphere. J Geophys Res 85:6496–6504
Aki K, Chouet B (1975) Origin of coda waves: source, attenuation, and scattering effects. J Geophys Res 80:3322–3342
Bouchon M (1981) A simple method to calculate green-functions for elastic layered media. Bull Seismol Soc Am 71(4):959–971
Bouchon M, Aki K (1977) Discrete wave-number representation of seismic-source wave fields. Bull Seismol Soc Am 67(2):259–277
Butler KE, Kulessa B, Pugin A (2018) Multimode seismoelectric phenomena generated using explosive and vibroseis sources. Geophys J Int 213(2):836–850. https://doi.org/10.1093/gji/ggy017
Chen X (1993) A systematic and efficient method for computing seismic normal modes in layered half-space. Geophys J Int 115(2):391–409. https://doi.org/10.1111/j.1365-246X.1993.tb01194.x
Chen X (2007) Generation and propagation of seismic SH waves in multi-layered media with irregular interfaces. Adv Geophys 48:191–264. https://doi.org/10.1016/s0065-2687(06)48004-3
Davis JA, James RO, Leckie JO (1978) Surface ionization and complexation at the oxide/water interface: I. Computation of electrical double layer properties in simple electrolytes. J Colloid Interf Sci 63(3):480–499. https://doi.org/10.1016/s0021-9797(78)80009-5
Dietrich M, Devi MS, Garambois S, Brito D, Bordes C (2018) A novel approach for seismoelectric measurements using multielectrode arrangements—I: theory and numerical experiments. Geophys J Int 215(1):61–80. https://doi.org/10.1093/gji/ggy269
Dzieran L, Thorwart M, Rabbel W, Ritter O (2019) Quantifying interface responses with seismoelectric spectral ratios. Geophys J Int 217(1):108–121. https://doi.org/10.1093/gji/ggz010
Frenkel J (1944) On tire theory of seismic and seismoelectric phenomena in a moist soil. J Phys USSR 8:230–241
Fujinawa Y, Noda Y (2015) Characteristics of seismoelectric wave fields associated with natural microcracks. Pure Appl Geophys 172:197–614
Fujinawa Y, Takahashi K, Noda Y, Iitaka H, Yazaki S (2011) Remote detection of the electric field change induced at the seismic wave front from the start of fault rupturing. Int J Geophys 2011:1–11. https://doi.org/10.1155/2011/752193
Gao Y, Harris JM, Wen J, Huang Y, Twardzik C, Chen X, Hu H (2016) Modeling of the coseismic electromagnetic fields observed during the 2004 M w 6.0 Parkfield earthquake. Geophys Res Lett. https://doi.org/10.1002/2015gl067183
Gao Y, Wang D, Wen J, Hu H, Chen X, Yao C (2019) Electromagnetic responses to an earthquake source due to the motional induction effect in a 2-D layered model. Geophys J Int 219:563–593
Garambois S, Dietrich M (2002) Full waveform numerical simulations of seismoelectromagnetic wave conversions in fluid-saturated stratified porous media. J Geophys Res Solid Earth 107:B7. https://doi.org/10.1029/2001jb000316
Ge Z, Chen X (2008) An efficient approach for simulating wave propagation with the boundary element method in multilayered media with irregular interfaces. Bull Seismol Soc Am 98(6):3007–3016. https://doi.org/10.1785/0120080920
Gershenzon NI, Gokhberg MB, Yunga SL (1993) On the electromagnetic field of an earthquake focus. Phys Earth Planet Interiors 77:13–19
Gershenzon NI, Bambakidis G, Ternovskiy I (2014) Coseismic electromagnetic field due to the electrokinetic effect. Geophysics 79(5):E217–E229
Haartsen MW, Pride SR (1997) Electroseismic waves from point sources in layered media. J Geophys Res-Solid Earth. 102:B11. https://doi.org/10.1029/97JB02936
Haines SS, Pride SR (2006) Seismoelectric numerical modeling on a grid. Geophysics 71(6):N57–N65. https://doi.org/10.1190/1.2357789
Han P, Hattori K, Huang Q, Hirano T, Ishiguro Y, Yoshino C, Febriani F (2011) Evaluation of ULF electromagnetic phenomena associated with the 2000 Izu Islands earthquake swarm by wavelet transform analysis. Nat Hazards Earth Syst Sci 11(3):965–970. https://doi.org/10.5194/nhess-11-965-2011
Han P, Hattori K, Hirokawa M, Zhuang J, Chen C-H, Febriani F, Yamaguchi H, Yoshino C, Liu J-Y, Yoshida S (2014) Statistical analysis of ULF seismomagnetic phenomena at Kakioka, Japan, during 2001–2010. J Geophys Res Space Phys 119(6):4998–5011. https://doi.org/10.1002/2014ja019789
Han P, Hattori K, Xu G, Ashida R, Chen C-H, Febriani F, Yamaguchi H (2015) Further investigations of geomagnetic diurnal variations associated with the 2011 off the Pacific coast of Tohoku earthquake (Mw 9.0). J Asian Earth Sci 114:321–326. https://doi.org/10.1016/j.jseaes.2015.02.022
Han P, Hattori K, Huang Q, Hirooka S, Yoshino C (2016) Spatiotemporal characteristics of the geomagnetic diurnal variation anomalies prior to the 2011 Tohoku earthquake (Mw 9.0) and the possible coupling of multiple pre-earthquake phenomena. J Asian Earth Sci 129:13–21. https://doi.org/10.1016/j.jseaes.2016.07.011
Han P, Hattori K, Zhuang J, Chen C-H, Liu J-Y, Yoshida S (2017) Evaluation of ULF seismo-magnetic phenomena in Kakioka, Japan by using Molchan’s error diagram. Geophys J Int 208(1):482–490. https://doi.org/10.1093/gji/ggw404
Hattori K, Han P, Yoshino C, Febriani F, Yamaguchi H, Chen C-H (2013) Investigation of ULF seismo-magnetic phenomena in Kanto, Japan during 2000–2010: case studies and statistical studies. Surv Geophys 34(3):293–316. https://doi.org/10.1007/s10712-012-9215-x
Honkura Y, Işıkara AM, Oshiman N, Ito A, Üçer B, Barış Ş, Tunçer MK, Matsushima M, Pektaş R, Çelik C, Tank SB, Takahashi F, Nakanishi M, Yoshimura R, Ikeda Y, Komut T (2000) Preliminary results of multidisciplinary observations before, during and after the Kocaeli (Izmit) earthquake in the western part of the North Anatolian Fault Zone. Earth Planets Space 52(4):293–298. https://doi.org/10.1186/BF03351638
Honkura Y, Ogawa Y, Matsushima M, Nagaoka S, Ujihara N, Yamawaki T (2009) A model for observed circular polarized electric fields coincident with the passage of large seismic waves. J Geophys Res Solid Earth. https://doi.org/10.1029/2008jb006117
Hu H, Gao Y (2011) Electromagnetic field generated by a finite fault due to electrokinetic effect. J Geophys Res 116:B08302
Huang Q (2002) One possible generation mechanism of co-seismic electric signals. Proc Jpn Acad Ser B 78(7):173–178. https://doi.org/10.2183/pjab.78.173
Huang Q (2011a) Rethinking earthquake-related DC-ULF electromagnetic phenomena: towards a physics-based approach. Nat Hazards Earth Syst Sci 11(11):2941–2949. https://doi.org/10.5194/nhess-11-2941-2011
Huang Q (2011b) Retrospective investigation of geophysical data possibly associated with the M(s)8.0 Wenchuan earthquake in Sichuan, China. J Asian Earth Sci 41:421–427. https://doi.org/10.1016/j.jseaes.2010.05.014
Huang Q, Ren H, Zhang D, Chen YJ (2015) Medium effect on the characteristics of the coupled seismic and electromagnetic signals. Proc Jpn Acad Ser B 91(1):17–24. https://doi.org/10.2183/pjab.91.17
Jiang L, Xu Y, Zhu L, Liu Y, Li D, Huang R (2018) Rotation-induced magnetic field in a coil magnetometer generated by seismic waves. Geophys J Int 212(2):743–759
Johnston MJS (1997) Review of electric and magnetic fields accompanying seismic and volcanic activity. Surv Geophys 18:441–475
Johnston MJS, Mueller RJ (1987) Seismomagnetic observation during the 8 July 1986 magnitude 5.9 North Palm-Spring earthquaek. Science 237:1201–1203. https://doi.org/10.1126/science.237.4819.1201
Karakelian D, Beroza GC, Klemperer SL, Fraser-Smith AC (2002a) Analysis of ultralow-frequency electromagnetic field measurements associated with the 1999 M 7.1 Hector Mine, California, earthquake sequence. Bull Seismol Soc Am 92(4):1513–1524. https://doi.org/10.1785/0120000919
Karakelian D, Klemperer SL, Fraser-Smith AC, Thompson GA (2002b) Ultra-low frequency electromagnetic measurements associated with the 1998 Mw 5.1 San Juan Bautista, California earthquake and implications for mechanisms of electromagnetic earthquake precursors. Tectonophysics 359:65–79. https://doi.org/10.1016/s0040-1951(02)00439-0
Kennett BLN (1983) Seismic wave propagation in stratified media. Cambridge University Press, New York
Kennett BLN, Kerry NJ (1979) Seismic waves in a stratified half space. Geophys J R Astron Soc 57(3):557–583. https://doi.org/10.1111/j.1365-246X.1979.tb06779.x
Levander AR (1990) Seismic scattering near the earth’s surface. Pure Appl Geophys 132:21–47
Liu J-Y, Chen C-H, Wu T-Y, Chen H-C, Hattori K, Bleier T, Kappler K (2017) Co-seismic signatures in magnetometer, geophone, and infrasound data during the Meinong Earthquake. Terr Atmos Ocean Sci 28(5):683–692. https://doi.org/10.3319/tao.2017.03.05.01
Luco JE, Apsel RJ (1983) On the Green’s function for a layered half-space: part I. Bull Seismol Soc Am 73(4):909–929
Mahardika H, Revil A, Jardani A (2012) Waveform joint inversion of seismograms and electrograms for moment tensor characterization of fracking events. Geophysics 77(5):ID23–ID39
Martin BE, Thomson CJ (1997) Modelling surface waves in anisotropic structures II: examples. Phys Earth Planet Interiors 103:253–279. https://doi.org/10.1016/s0031-9201(97)00037-x
Matsushima M, Honkura Y, Oshiman N, Barış Ş, Tunçer MK, Tank SB, Çelik C, Takahashi F, Nakanishi M, Yoshimura R, Pektaş R, Komut T, Tolak E, Ito A, Iio Y, Işıkara AM (2002) Seismoelectromagnetic effect associated with the İzmit earthquake and its aftershocks. Bull Seismol Soc Am 92(1):350–360. https://doi.org/10.1785/0120000807
Matsushima M, Honkura Y, Kuriki M, Ogawa Y (2013) Circularly polarized electric fields associated with seismic waves generated by blasting. Geophys J Int 194(1):200–211. https://doi.org/10.1093/gji/ggt110
Mizutani H, Ishido T, Yokokura T, Ohnishi S (1976) Electrokinetic phenomena associated with earthquakes. Geophys Res Lett 3:365–368
Mueller RJ, Johnston MJS (1990) Seismomagnetic effect generated by the October 18, 1989 M L 7.1 Loma-Prieta, California Earthquake. Geophys Res Lett 17(8):1231–1234. https://doi.org/10.1029/gl017i008p01231
Nagao T, Orihara Y, Yamaguchi T, Takahashi I, Hattori K, Noda Y, Sayanagi K, Uyeda S (2000) Co-seismic geoelectric potential changes observed in Japan. Geophys Res Lett 27(10):1535–1538. https://doi.org/10.1029/1999gl005440
Ogawa T, Utada H (2000) Coseismic piezoelectric effects due to a dislocation 1. An analytic far and early-time field solution in a homogeneous whole space. Phys Earth Planet Interiors 121:273–288
Okubo K, Takeuchi N, Utsugi M, Yumoto K, Sasai Y (2011) Direct magnetic signals from earthquake rupturing: Iwate-Miyagi earthquake of M 7.2, Japan. Earth Planet Sci Lett 305:65–72
Olson AH, Apsel RJ (1982) Finite faults and inverse theory with applications to the 1979 Imperial Valley earthquake. Bull Seismol Soc Am 72(6):1969–2001
Press F (1964) Seismic wave attenuation in the crust. J Geophys Res 69(20):4417–4418. https://doi.org/10.1029/JZ069i020p04417
Pride SR (1994) Governing equations for the coupled electromagnetics and acoustics of porous media. Phys Rev B 50:15678–15696. https://doi.org/10.1103/PhysRevB.50.15678
Pride SR, Haartsen MW (1996) Electroseismic wave properties. J Acoust Soc Am 100(3):1301–1315. https://doi.org/10.1121/1.416018
Pride SR, Morgan F (1991) Electrokinetic dissipation induced by seismic waves. Geophysics 56:914–925
Pride SR, Moreau F, Gavrilenko P (2004) Mechanical and electrical response due to fluid-pressure equilibration following an earthquake. J Geophys Res-Solid Earth. 109:B3. https://doi.org/10.1029/2003JB002690
Ren H, Huang Q, Chen X (2010a) Analytical regularization of the high-frequency instability problem in numerical simulation of seismoelectric wave-fields in multi-layered porous media. Chin J Geophys 53(3):506–511. https://doi.org/10.3969/j.issn.0001-5733.2010.03.004
Ren H, Huang Q, Chen X (2010b) A new numerical technique for simulating the coupled seismic and electromagnetic waves in layered porous media. Earthq Sci 23:167–176. https://doi.org/10.1007/s11589-009-0071-9
Ren H, Chen X, Huang Q (2012) Numerical simulation of coseismic electromagnetic fields associated with seismic waves due to finite faulting in porous media. Geophys J Int 188(3):925–944. https://doi.org/10.1111/j.1365-246X.2011.05309.x
Ren H, Wen J, Huang Q, Chen X (2015) Electrokinetic effect combined with surface-charge assumption: a possible generation mechanism of coseismic EM signals. Geophys J Int 200(2):835–848. https://doi.org/10.1093/gji/ggu435
Ren H, Huang Q, Chen X (2016a) Existence of evanescent electromagnetic waves resulting from seismoelectric conversion at a solid-porous interface. Geophys J Int 204(1):147–166. https://doi.org/10.1093/gji/ggv400
Ren H, Huang Q, Chen X (2016b) Numerical simulation of seismo-electromagnetic fields associated with a fault in a porous medium. Geophys J Int 206(1):205–220. https://doi.org/10.1093/gji/ggw144
Ren H, Huang Q, Chen X (2018) Quantitative understanding on the amplitude decay characteristic of the evanescent electromagnetic waves generated by seismoelectric conversion. Pure Appl Geophys 175(8):2853–2879. https://doi.org/10.1007/s00024-018-1823-z
Sakai H, Kobayashi T, Izumi Y, Nakayama T, Hattori K (2017) Induced change of electric self-potential and magnetic field at the artificial explosion. Electr Commun Jpn 100(3):68–75. https://doi.org/10.1002/ecj.11942
Skordas E, Kapiris P, Bogris N, Varotsos P (2000) Field experimentation on the detectability of co-seismic electric signals. Proc Jpn Acad Ser B 76(4):51–56. https://doi.org/10.2183/pjab.76.51
Sun Y-C, Ren H, Zheng X-Z, Li N, Zhang W, Huang Q, Chen X (2019) 2-D poroelastic wave modelling with a topographic free surface by the curvilinear grid finite-difference method. Geophys J Int 218(3):1961–1982. https://doi.org/10.1093/gji/ggz263
Tang J, Zhan Y, Wang L-F, Dong Z-Y, Zhao G-Z, Xu J-L (2010) Electromagnetic coseismic effect associated with aftershock of Wenchuan M(s)8.0 earthquake. Chin J Geophys 53(3):526–534. https://doi.org/10.3969/j.issn.0001-5733.2010.03.006
Tsukamoto K, Aizawa K, Chiba K, Kanda W, Uyeshima M, Koyama T, Utsugi M, Seki K, Kishita T (2018) Three-dimensional resistivity structure of Iwo-yama volcano, Kirishima Volcanic Complex, Japan: relationship to shallow seismicity, surface uplift, and a small phreatic eruption. Geophys Res Lett 45(2):12821–12828. https://doi.org/10.1029/2018GL080202
Tsutsui M (2014) Behaviors of electromagnetic waves directly excited by earthquakes. IEEE Geosci Remote Sens Lett 11(11):1961–1965
Wang Q, Huang Q (2016) The spatio-temporal characteristics of geomagnetic induction vectors in North China. Chin J Geophys 59(1):215–228. https://doi.org/10.6038/cjg20160118
Wu R-S (1982) Attenuation of short period seismic waves due to scattering. Geophys Res Lett 9:9–12
Wu R-S, Aki K (1985) Scattering characteristics of elastic waves by an elastic heterogeneity. Geophysics 50:582–595
Xu G, Han P, Huang Q, Hattori K, Febriani F, Yamaguchi H (2013) Anomalous behaviors of geomagnetic diurnal variations prior to the 2011 off the Pacific coast of Tohoku earthquake (Mw9.0). J Asian Earth Sci 77:59–65. https://doi.org/10.1016/j.jseaes.2013.08.011
Yamazaki K (2012) Estimation of temporal variations in the magnetic field arising from the motional induction that accompanies seismic waves at a large distance from the epicentre. Geophys J Int 190(3):1393–1403. https://doi.org/10.1111/j.1365-246X.2012.05586.x
Yamazaki K (2013) Improved models of the piezomagnetic field for the 2011 Mw 9.0 Tohoku-oki earthquake. Earth Planet Sci Lett 363:9–15. https://doi.org/10.1016/j.epsl.2012.12.019
Zhang D, Ren H, Huang Q (2013) Numerical simulation study of co-seismic electromagnetic signals in porous media. Chin J Geophys 56(8):2739–2747. https://doi.org/10.6038/cjg20130822
Acknowledgements
The authors acknowledge the use of Focal Mechanism Catalog from NIED. The main part of this work was carried out when Dr. Ren was visiting ERI, The University of Tokyo in 2017. Dr. Ren very much appreciates the warm-hearted help and important supports from International Research Promotion Office of ERI during that period. All the authors appreciate the excellent review work of the two anonymous reviewers.
Funding
This study was supported by the National Natural Science Foundation of China (Grant numbers 41674074, 41874082, 41790465 and 41904046). This study was also supported by the Ministry of Education, Culture, Sports, Science and Technology (MEXT) of Japan, under its “Earthquake and Volcano Hazards Observation and Research Program” and “Integrated Program for Next Generation Volcano Research and Human Resource Development”.
Author information
Authors and Affiliations
Contributions
MU, KA, KT, WK, KS, TK, TO and AW carried out the field observation and analyzed the data. Y-CS, HR, QH, JR and XC carried out the numerical simulations. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Seismoelectric modeling in layered porous media
For a layered porous model with a source in the sth layer, the scalar and vector wave-fields involved in the governing Eqs. (1)–(7) can be expanded through a set of scalar and vector function basis (see Appendix B) expressed in cylindrical coordinates. Then, one will obtain two independent sets of linear ordinary differential equations, which correspond to the case of SHTE (where SH waves are coupled to EM fields of transversely polarized electric mode) and the case of PSVTM (where P and SV waves are coupled to the EM fields of transversely polarized magnetic mode). For the wave-fields in the jth layer bounded by interfaces of z = z(j−1) and z = z(j), both cases can be written in the following form:
where \(z^{(j - 1)} < z < z^{(j)}\), y is a vector that comprises the wave-fields’ expansion coefficients, S is the vector of source information, A is a matrix that comprises the information of medium properties and horizontal partial derivatives, and δj,s is the Kronecker delta function. The y vectors of the two cases are written as:
where uT,m, uS,m, uR,m, wR,m, τT,m, τS,m, τR,m, HT,m, HS,m, ET,m, ES,m and Pm are the corresponding expansion coefficients of unknown vector functions u, w, τ, H, E, and the unknown pore-fluid pressure P, respectively.
The general solution of Eq. (27) can be written as (Ren et al. 2012):
where a is a to-be-solved vector that contains the adjusted wave-field amplitudes and b is the source term vector. The two matrices Θ and Λ(z) are related to the eigen decomposition of matrix A as follows (Ren et al. 2012):
where A(j)ei = − λiei (i = 1, 2, …, m), A(j)ei = λiei (i = m + 1, m + 2, …, 2m), namely, ± λi (i = 1, 2, …, m) and ei (i = 1, 2, …, 2m) are the eigen-values and eigen-vectors of matrix A(j), respectively. For the wave propagation problem, the eigen-values, which represent the vertical wavenumbers, always show up in pairs because the existence of down-going and up-going waves with same horizontal wavenumber is always reasonable. Thus, Λ(j)(z) can be expressed in the form of Eqs. (32) and (33). For SHTE case, we obtain m = 2 pairs of eigen-values, ± λi (i = 1,2). For PSVTM case, we obtain m = 4 pairs of eigen-values, ± λi (i = 1,2,3,4). We define Re(λi) > 0. Thus, the two diagonal matrices Λd(z) and Λu(z) correspond to down-going and up-going waves, respectively (Ren et al. 2012, 2016a). It should be emphasized that, in Eq. (33), the introduction of extra exponential factors exp(λiz(j−1)) and exp(− λiz(j)) is an important pretreatment of the LAC GRTM. It guarantees that all the diagonal elements in the matrix Λ(j)(z) satisfy \(\left| {\exp [ - \lambda_{i} (z - z^{{\left( {j - 1} \right)}} )]} \right| \le 1\) or \(\left| {\exp [ - \lambda_{i} (z^{\left( j \right)} - z)]} \right| \le 1\), which provides a good stability in the numerical simulation section.
The vector a will be determined by the LAC GRTM (Ren et al. 2012). After obtaining the wave-field solutions in the frequency–wavenumber domain, we can transform them back to the space–time domain by using the well-known discrete wavenumber method (Bouchon and Aki 1977; Bouchon 1981), which virtually introduces a spatial periodicity of sources to discretize the radiated wave-fields and imposes the discrete Fourier transform with complex frequencies to perform the integration over the frequency domain.
Appendix B: A set of scalar and vector function basis
The scalar function basis is
where Jm(kr) is a Bessel function of order m. An arbitrary scalar function F(r, θ, z, ω) can be expanded as follows:
where fm(z, k, ω) is the expansion coefficient of F(r, θ, z, ω), which can be evaluated as follows:
where the symbol * indicates the complex conjugate.
For a vector function, we take the following set of vector functions as basis,
where \({\mathbf{e}}_{{\mathbf{z}}}\) is the unit vector in z direction. Then, an arbitrary vector function, say \({\mathbf{A}}\left( {r,\theta ,z,\omega } \right)\), can be expanded as follows:
where AT,m, AS,m and AR,m are the expansion coefficients, which can be evaluated by the following formulas:
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sun, YC., Uyeshima, M., Ren, H. et al. Numerical simulations to explain the coseismic electromagnetic signals: a case study for a M5.4 aftershock of the 2016 Kumamoto earthquake. Earth Planets Space 71, 143 (2019). https://doi.org/10.1186/s40623-019-1122-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40623-019-1122-7