
Abstract
Background
Climate change is reshaping Bering Sea crab distributions and recent population declines have elevated the urgency in understanding spatial dynamics in relation to management boundaries. While pop-up satellite archival tags (PSATs) can provide fishery-independent movement information, a high level of spatial resolution is needed to evaluate small-scale (i.e., 10 s of km) movements of crabs. Because PSATs drift at the surface prior to acquisition of a satellite-estimated location (via Argos), the accuracy of pop-up location (i.e., animal terminal position) estimates depends on the ability to accurately estimate drift error. We deployed PSATs (n = 36) on fixed-position moorings in Bristol Bay and Marmot Bay, Alaska to validate a new method to estimate tag pop-up location and an associated error ellipse that uses in situ drift data from surfaced tags to estimate drift error. Estimated pop-up location was compared to the location of tag surfacing (i.e., the tag’s fixed position) and to an alternative estimate (i.e., an early satellite-estimated location). Additional tags were deployed on mature male red king crab (Paralithodes camtschaticus) in Bristol Bay during 2020 (n = 84) and 2021 (n = 90) to compare estimates of tag drift error and crab displacement derived using the method.
Results
For red king crab tags with pop-up location estimates in 2020 (n = 79) and 2021 (n = 46), mean drift error was 9% and 44% of mean crab displacement, respectively. For fixed-position PSATs with pop-up location estimates (n = 27), mean distance between the estimated pop-up location and the tag’s fixed position was 2.0 km, representing a mean improvement in accuracy of 51% over alternative estimates. Corresponding error ellipse estimates either encompassed the tag’s fixed position (n = 11) or their boundaries were a mean distance of 1.3 km (n = 16) from the fixed position.
Conclusions
Our method improves pop-up location estimates for PSAT-tagged animals and is particularly well suited for crabs and other slow-moving benthic marine species. The improved estimates enhance PSAT utility for addressing management and ecological questions that require a fine spatial resolution, such as movement near management boundaries or defining essential habitat for important life history events.
Similar content being viewed by others
Background
Interannual distributional changes are well documented for many marine species, yet an understanding of fine-scale movement patterns is often needed for adaptive management implementation, such as shifting stock boundary positions, habitat protection areas, and bycatch reduction. While population surveys typically provide temporal snapshots of spatial distribution, tags can provide information on movement and distribution outside of surveyed periods. Pop-up satellite archival tags (PSATs) are advantageous over other tags because they do not require recapture, are not limited by the spatial extent of monitoring equipment, and thus provide a less constrained estimate of animal movement. PSATs have been traditionally limited to use on large pelagic fishes [1,2,3], but advances in technology (e.g., tag miniaturization) allow deployment on smaller animals such as benthic crustaceans, including American lobster Homarus americanus (R. Rochette, University of New Brunswick, personal communication), red king crab (RKC) Paralithodes camtschaticus (W. C. Long, National Marine Fisheries Service, personal communication), and porcupine crab Neolithodes grimaldii [4]. Yet, because crustaceans tend to move less than pelagic fishes (i.e., 10 s of km vs. 100 s–1000 s of km), error in tag pop-up location (i.e., animal terminal position) estimation is of greater concern.
Delayed satellite reception can affect the accuracy of pop-up location estimates. PSATs release from animals on a pre-set date or after an elapsed interval and transmit messages encoding tag number, transmission frequency, repetition rate (typically 60–90 s), and sensor data to the Argos satellite system. The Argos system measures the Doppler shift in transmission frequency between the tag and satellite and uses either a least squares analysis or a multiple-model Kalman filter algorithm to estimate tag location and associated positional error (error circle and ellipse) [5]. If at least 4 messages are received during an approximately 10-min satellite pass, initial location and error estimates are calculated. Accordingly, PSATs drift on the surface for some amount of time prior to the initial location estimate and typically longer before a user-defined, high-quality Argos location estimate (determined via Argos calculated error) is provided. This delay may span from several hours to several days, resulting in estimated tag drift error (distance between the tag’s pop-up location and first high-quality Argos location estimate) of 10 s of km [6]. Drift error is a concern because it can exceed animal displacement [4, 6], and if uncorrected, limits PSAT utility for species which move on the scale of 10 s of km, such as crabs, because the needed spatial resolution of many ecological questions (e.g., seasonal migration relative to management boundaries) is on the scale of kilometers.
Recent declines of eastern Bering Sea (EBS) crab populations have elevated the urgency in understanding spatial dynamics including population-level redistribution in response to a changing environment. The North Pacific Fishery Management Council (NPFMC) gives a comprehensive review of research priorities on a triennial cycle and identified “Spatial distribution and movement of crabs relative to life history events and fishing” as highest priority in 2018 and 2021. In response, the application of PSATs as a research tool for EBS crabs has expanded. PSATs were used to investigate seasonal movement of Tanner crab Chionoecetes bairdi near management boundaries [6], to estimate spawning locations and reevaluate the effectiveness of existing trawl closure areas for Bristol Bay RKC (L. S. Zacher, National Marine Fisheries Service, personal communication), and to investigate snow crab C. opilio movement near the EBS slope and across the U.S./Russia border (C. A. Melovidov, University of Alaska Fairbanks, personal communication), which demonstrated that PSATs can be deployed on medium and large-bodied crabs with a high number of tag reports (i.e., > 80% of tags uplinked with satellites). However, data transmission rate, location quality, and premature tag release rate varied, and the relative impact of drift error was substantial (mean drift error > 50% of mean crab displacement [6]).
Attempts to account for tag drift error are limited and use varied methodology [4, 6,7,8,9,10,11,12,13,14,15,16,17,18]. In some cases, drift error and pop-up location were estimated for only prematurely released tags using tag drift speed and direction from Argos location estimates [11, 12, 14, 15], while others estimated drift-based positional error for the first high-quality Argos location estimate without estimating pop-up location [4, 16, 17]. While Argos location class (LC; a categorical measure of the estimated positional error radius) is often considered [4, 7, 9,10,11, 16,17,18] the alternative and potentially more informative Argos error ellipse [5, 19, 20] is largely ignored. Few studies have systematically estimated pop-up location, likely because the drift error (10 s of km) is relatively minor compared to the scale of movement exhibited by highly mobile fish species (100 s–1000 s of km). Recently, time-reversed state-space modelling of tag drift trajectories was used to estimate tag emergence location (i.e., estimated location of a predation event) and associated positional error [18], yet the method had difficulty accurately estimating emergence location with simulated transmission delays (e.g., removing the first 16–48 h of Argos location estimates). Using PSATs deployed on fixed-position moorings in Bristol Bay and near Kodiak, Alaska, and on RKC in Bristol Bay, we developed a method for estimating tag pop-up location and associated positional error that makes use of spatiotemporally adjacent Argos location data either from the tag (i.e., the “target tag”) or from one or more nearby, previously surfaced tags (i.e., “proxy tags”) to estimate the target tag’s drift speed and direction prior to the first high-quality Argos location estimate.
Methods
Bristol Bay is a large embayment in the southern portion of the EBS with depths mostly less than 100 m, variable annual sea ice extent, relatively large tidal amplitudes, and cyclonic mean flows. Despite weak long-term flow patterns, stronger short-term circulation occurs due to tidal currents and wind effects [21]; thus, surface currents, winds, and short-period waves are likely the primary drivers of PSAT surface drift. Seasonal variability in surface conditions (e.g., storms are more prevalent in winter than summer) is likely to cause variability in PSAT drift trajectories across pop-up periods.
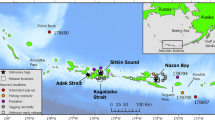
PSATs were deployed on large male RKC (≥ 135 mm carapace length) during summer 2020 (n = 84) and fall 2021 (n = 90) in Bristol Bay (Fig. 1). Deployed tags were a combination of mrPAT (n = 66 in 2020, n = 78 in 2021) and MiniPAT (n = 18 in 2020, n = 12 in 2021) (Wildlife Computers, Inc., Redmond, WA). Tags were attached using a polyolefin tubing harness wrapped around the carapace between the first and second walking legs and between the second and third walking legs; the harness was secured with two double overhand knots and two tin-plated copper swaging sleeves. A monofilament fishing line tether secured with stainless-steel swaging sleeves connected each PSAT to a harness (Additional file 1). Tags deployed in 2020 (50–60 m depth) were scheduled to release from host crab in mid-October after approximately 3 months at liberty and those deployed in 2021 (45–80 m depth) were scheduled for release in early January 2022 after approximately 2 months at liberty. In both deployments, tags were scheduled to release across 3 consecutive days, with MiniPATs releasing at 20:00 h on the first day and half of the mrPATs on each of the second and third days at 00:00 h. MiniPAT tags were set to release first because they have a faster burn period (time from initiation of release to surfacing), higher rate of high-quality location estimates, and longer transmission time than mrPATs (authors’ unpublished data) which facilitates their use as a source of in situ drift data to estimate pop-up location of other tags. Transmission repetition rate was set to default values for tags deployed in 2020 (60 s for MiniPAT, 90 s for mrPAT) and all tags deployed in 2021 were set to 60 s. Argos location and error estimates were obtained by a combination of the least squares analysis and Argos Auxiliary Location Processing (provides a refined location estimate and error ellipse for locations based on 2 or 3 messages).

Locations of PSAT-tagged red king crab deployed during 2020 (orange circles) and 2021 (teal circles). Area-specific sample size is indicated by the number enclosed in parentheses
Estimation of tag pop-up location was based on Argos-estimated tag drift locations: either (1) two drift locations \({P}_{1}\) (the first high-quality Argos location estimate) and \({P}_{2}\) (the next Argos drift location estimate that satisfies requisite time and quality criteria described below) of the target tag; or (2) \({P}_{1}\) of the target tag and two drift locations \({P}_{1}^{*}\) and \({P}_{2}^{*}\) of a proxy tag (Fig. 2). With \({P}_{0}\) denoting the pop-up location of the target tag, let \({t}_{1}\) denote the drift time between \({P}_{0}\) and \({P}_{1}\) (under either scenario), \({t}_{2}\) the drift time between \({P}_{1}\) and \({P}_{2}\), and \({t}_{2}^{*}\) the drift time between \({P}_{1}^{*}\) and \({P}_{2}^{*}\). Pop-up location was estimated either by

in case (1) or by

in case (2), where all vectors were calculated as great-circle paths. These computations use an appropriately scaled version of one of the drift vectors  or
or  in place of the unknown drift vector
in place of the unknown drift vector  to extrapolate from \({P}_{1}\) to an estimate of tag pop-up location \({P}_{0}\). Positional error associated with pop-up location was estimated based on Argos-reported \(\sqrt{2}\sigma (63\%)\) error ellipses [5] associated with \({P}_{1}\) and \({P}_{2}\) in case (1) or \({P}_{1}\), \({P}_{1}^{*}\), and \({P}_{2}^{*}\) in case (2) using multivariate normal theory to calculate the resulting error distribution of a 95% error ellipse (Additional file 2). Although the calculations used to estimate pop-up location employ nonlinear transformations, such as the haversine function, given the relatively small distances involved (i.e., typically < 50 km) they are well approximated by simple linear transformations. The median positional difference in pop-up location estimates using linear versus nonlinear transformations was negligible (5 m, interquartile range = 2–14 m) for tags deployed in this study; thus, we expect that multivariate normal variance computations based on these approximations and reported Argos location errors provide a reasonable estimate of pop-up location error.
to extrapolate from \({P}_{1}\) to an estimate of tag pop-up location \({P}_{0}\). Positional error associated with pop-up location was estimated based on Argos-reported \(\sqrt{2}\sigma (63\%)\) error ellipses [5] associated with \({P}_{1}\) and \({P}_{2}\) in case (1) or \({P}_{1}\), \({P}_{1}^{*}\), and \({P}_{2}^{*}\) in case (2) using multivariate normal theory to calculate the resulting error distribution of a 95% error ellipse (Additional file 2). Although the calculations used to estimate pop-up location employ nonlinear transformations, such as the haversine function, given the relatively small distances involved (i.e., typically < 50 km) they are well approximated by simple linear transformations. The median positional difference in pop-up location estimates using linear versus nonlinear transformations was negligible (5 m, interquartile range = 2–14 m) for tags deployed in this study; thus, we expect that multivariate normal variance computations based on these approximations and reported Argos location errors provide a reasonable estimate of pop-up location error.

Estimation of PSAT pop-up location using a tag’s drift path (target-tag method, a, b) or the drift path of a proxy tag (proxy-tag method, c, d). Yellow circles are the estimated pop-up location (P0), teal circles are the first high-quality Argos location estimate (P1), and red circles are the next Argos drift location estimate that satisfies requisite time and quality criteria (P2). Orange and pink circles are a spatiotemporally adjacent set of Argos drift location estimates from a proxy tag that satisfy requisite time and quality criteria (P1* and P2*). Dark-blue dots are Argos drift locations and corresponding light-blue ellipses are Argos-estimated 63% error ellipses. Purple ellipses are composite 95% error ellipses based on all Argos-estimated error ellipses associated with drift locations used to estimate pop-up location
Estimated tag pop-up location and associated error were computed using automated methods (customized R functions; Additional files 3 and 4) for cases in which the available Argos location data for target and proxy tags satisfied specific criteria. Location quality and time criteria were developed to best represent criteria used in an initial manual analysis of the 2020 RKC tags. First, for \({P}_{1}\) we considered only locations for which the reported Argos error ellipse semi-major axis was less than 2.25 km. Second, we further restricted selection of \({P}_{2}\) to locations for which the error ellipse semi-major axis was less than 1.25 km and 0.375 \({{t}_{1}<t}_{2 }<{t}_{1}\) in case (1) above (target-tag method), whereas in case (2) above (proxy-tag method), we selected \({P}_{1}^{*}\) and \({P}_{2}^{*}\) subject to the requirements that the error ellipse semi-major axis was less than 2 km, \({P}_{1}^{*}\) occurred within 1 h of \({P}_{0}\), and \({P}_{2}^{*}\) occurred within both 1 h and 60 km of \({P}_{1}\). Except for a few cases (n = 9) in which estimates of pop-up location from multiple proxy tags were variable, we used the proxy tag closest to the target tag which met requisite Argos location time and quality criteria. For these cases, consideration was given to the distance between proxy and target tags, temporal overlap of proxy and target tag drifts, proximity of pop-up location estimates and error ellipses (estimate overlap), and proxy and target tag proximity to land. In cases where the requisite criteria for the automation were not satisfied, pop-up location was estimated manually on a case-by-case basis using more relaxed criteria, with priority given to minimum deviations from standard criteria, closest time match, and minimum Argos error, respectively.
We used several metrics to assess PSAT performance within and between the 2020 and 2021 RKC deployments. These include the success rate (i.e., percentage of deployed tags for which an estimate of pop-up location was obtained) and the fate of tags for which no estimate was computed (premature release, missing Argos location or error information, or large Argos error and/or long drift time for the best available location). For tags with an estimated pop-up location, we examined drift time and corresponding estimated drift error prior to the first high-quality Argos location estimate and compared the latter to estimated crab displacement (distance from deployment location to estimated pop-up location) to assess the relative impact of drift error in each deployment.
To evaluate the accuracy of estimated pop-up locations and error ellipses, additional PSATs (n = 4 in 2020, n = 20 in 2021) were deployed in Bristol Bay at fixed positions (30–75 m depth). Each tag was attached to the saddle of an 18 kg cement block using 1 m of monofilament fishing line. Locations and release timing of fixed mrPAT tags (n = 4 in 2020, n = 10 in 2021) were chosen to coincide with expected pop-up locations and release timing of PSATs deployed on RKC, while locations and release timing of fixed MiniPAT tags (n = 10 in 2021) were selected to coincide with expected pop-up locations and release timing of PSATs deployed on female RKC for a separate study. Tags were scheduled to release in mid-October 2020 (n = 4 mrPAT, deployed approximately 3 months), early January 2022 (n = 10 mrPAT, deployed approximately 2 months), and early May 2022 (n = 10 MiniPAT, deployed approximately 6 months). Transmission repetition rate was set to 90 s for mrPATs deployed in 2020 and 60 s for all tags deployed in 2021. To assess the efficacy of estimation methods in a different area, a third group of fixed-position PSATs (n = 10 mrPAT, n = 2 MiniPAT) was deployed during summer 2022 in Marmot Bay near Kodiak, Alaska (130–200 m depth) with tags scheduled to release in late-July 2022 after approximately 2 months; transmission repetition rate was set to 60 s.
Pop-up location and an associated error ellipse were estimated for each fixed-position PSAT using either Eq. (1) or (2), the error estimation process described in Additional file 2, and the location selection criteria outlined above. For tags that required manual estimation of pop-up location, the following criteria adjustments were necessary: \({P}_{1}\) and \({P}_{1}^{*}\) error ellipse semi-major axis ≤ 3.3 km; 0.3 \({{t}_{1}<t}_{2 }<\) 1.6 \({t}_{1}\); \({P}_{1}^{*}\) occurred within 2.5 h of \({P}_{0}\) and \({P}_{2}^{*}\) occurred within 67 km of \({P}_{1}\). To assess tag pop-up location accuracy, we compared pop-up location estimate error (distance between tag’s fixed position and estimated pop-up location) to the corresponding drift error associated with the first high-quality Argos location estimate (distance between tag’s fixed position and first high-quality Argos location estimate) as the relative percentage change in error [1 − (estimate error / drift error)] × 100%. Both errors were calculated based on the assumption that true pop-up location was well approximated by the tag’s fixed position as horizontal displacement during tag ascent was likely < 0.1 km based on deployment depth (≤ 200 m), hourly current velocity from M2 and CB1 moorings,Footnote 1 and MiniPAT tag ascent rate (0.36 m s−1) determined from the depth archive of a recovered tag. While the ascent rate for mrPAT tags was not known, it was assumed to be close to that of the MiniPAT based on similarities in tag size and buoyancy (M. Rutishauser, Wildlife Computers Inc., personal communication). The ability of the 95% error ellipse to capture true error associated with the estimated pop-up location was assessed by counting the number of tag fixed positions located within their respective error ellipse; for positions located outside the ellipse, we quantified the spatial extent of coverage failure by measuring the shortest distance from the fixed position to the ellipse.
Results
Of PSATs deployed on RKC in 2020, 79 of 84 (94%) provided sufficient data to estimate pop-up location, while pop-up location was estimated for 46 of 90 (51%) PSATs deployed on RKC in 2021 (Table 1). All MiniPAT tags had an estimated pop-up location, while several mrPAT tags (particularly those from 2021) had various reasons that an estimate was not obtained. In both deployments, tags drifted at the surface for a variable amount of time before a high-quality location was estimated by Argos (2020: median = 5.1 h, range = 0.2–75.1 h; 2021: median = 10.0 h, range = 0.3–38.6 h). On average, estimated drift error prior to a high-quality Argos location estimate was greater in 2021 (mean = 21.0 km, range = 1.4–50.7 km) than in 2020 (mean = 4.0 km, range = 0.0–24.4 km) (Fig. 3), while estimated crab displacement was similar between deployments (2020: mean = 44.2 km, range = 3.0–111.5 km; 2021: mean = 47.7, range = 4.9–124.2 km). Mean tag drift error represented a larger proportion of mean crab displacement in 2021 (44%) than in 2020 (9%).

Boxplot of estimated tag drift error prior to the first high-quality Argos location estimate (a) and estimated crab displacement (b) for PSAT-tagged red king crab of which pop-up location was estimated (n = 79 in 2020, n = 46 in 2021). The mean is indicated by X
Fixed-position mrPATs deployed in Bristol Bay during 2020 and 2021 resulted in 7 pop-up locations estimated using proxy tags (Fig. 4a). Three fixed tags deployed in 2020 surfaced in mid-October and drifted at the surface for 2.7–7.0 h (2.7–5.3 km drift error) before a high-quality location was estimated by Argos (Table 2). After correcting for drift error, estimate error ranged 0.9–2.2 km marking improvements in accuracy of 19–83% relative to drift error. The remaining 4 fixed tags (deployed in 2021) surfaced in early January 2022 and drifted at the surface for 3.1–38.4 h prior to a high-quality Argos location estimate; drift error ranged 7.9–30.8 km and estimate error ranged 0.7–6.5 km representing a 79–91% change in accuracy. Across both deployments, 3 of 7 fixed-tag positions were located within the error ellipse associated with estimated pop-up location, whereas the 4 fixed-tag positions located outside the ellipse were 0.6–4.8 km from the ellipse’s boundary (Fig. 4a).

Estimated pop-up location (yellow circles) for PSATs deployed at fixed positions in Bristol Bay, Alaska, including mrPATs (2020 and 2021, a) and MiniPATs (2021, b). Corresponding first high-quality Argos location estimate (teal circles) and tag’s fixed deployment position (red stars) are shown as reference points along with drift error (solid lines) and estimate error (dashed lines). Light-blue ellipses are Argos-estimated 63% error ellipses and purple ellipses are composite 95% error ellipses based on all Argos-estimated error ellipses associated with drift locations used to estimate pop-up location
MiniPATs deployed at fixed positions during the 2021 Bristol Bay study resulted in pop-up location estimates for 9 tags based on either the proxy-tag method (n = 6) or target-tag method (n = 3) (see Fig. 4b for a representative subset of these tags). Tags reached the surface in early May 2022 and drifted for 0.6–4.1 h before a high-quality Argos location estimate was obtained, corresponding to drift error of 0.4–6.8 km (Table 2). Estimate error ranged from 0.3 to 2.8 km, representing a change in accuracy of − 34–92%. Fixed positions of 6 tags were located within the error ellipse while positions of the remaining 3 tags were 0.3–1.0 km from the ellipse’s boundary.
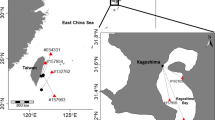
Pop-up locations for 11 PSATs deployed at fixed positions in Marmot Bay were estimated either by the target tag method (n = 2 MiniPAT) or proxy tag method (n = 9 mrPAT) (Fig. 5). Tags surfaced in late-July 2022 and drifted at the surface for 0.3–11.6 h, moving 1.0–21.3 km from their fixed positions (Table 2). Estimate error ranged from 0.7 to 5.1 km, a change in accuracy of − 31–87%. Fixed positions of nearly all tags (n = 9) were located outside of the error ellipse (0.1–4.1 km from the ellipse’s boundary) while positions of 2 tags were located within the ellipse.

Estimated pop-up location (yellow circles) for PSATs deployed at fixed positions in Marmot Bay, Alaska during 2022. Corresponding first high-quality Argos location estimate (teal circles) and tag’s fixed deployment position (red stars) are shown as reference points along with drift error (solid lines) and estimate error (dashed lines). Light-blue ellipses are Argos-estimated 63% error ellipses and purple ellipses are composite 95% error ellipses based on all Argos-estimated error ellipses associated with drift locations used to estimate pop-up location
Across all 27 fixed-position PSATs for which a pop-up location was estimated, mean drift error was 7.7 ± 1.7 km (standard error), mean estimate error was 2.0 ± 0.3 km (Fig. 6), and mean change in accuracy was 51 ± 8%. Change in accuracy was highly variable when drift error was below 5 km (n = 14, − 34–86%) but resulted in consistent, large improvements (62–92%) when drift error exceeded 5 km (n = 13) (Fig. 7). Fixed positions of 11 tags were located within the error ellipse while fixed positions of 16 tags were a mean distance of 1.3 ± 0.3 km from the ellipse’s boundary.

Boxplot of drift error and estimate error for PSATs deployed at fixed positions (n = 27). The mean is indicated by X

Relative percentage change in accuracy (estimate error relative to drift error) as a function of drift error for PSATs deployed at fixed positions (n = 27)
Discussion
Corrections for tag drift generally improved pop-up location estimates. These methods can be applied to a range of PSAT efforts, but are particularly well suited for slow-moving animals, such as crabs, where drift error can be proportionally large compared to animal displacement. We found that mean drift error was approximately 4 times greater than mean estimate error, where the estimated pop-up location was on average 5.7 km closer to the tag’s fixed position than the first high-quality Argos location estimate. We consider this a non-trivial improvement relative to a typical crab displacement, especially for studies evaluating management boundaries. For example, understanding impacts of fishery closure areas on Tanner crab availability and exploitation rates requires high-resolution terminal position estimates [6]. Consistently large proportional improvements in accuracy were achieved for PSATs with moderate to large drift error (i.e., > 5 km), suggesting that the estimation methods may be best suited for tags with extended drifts. Drift error estimates > 5 km prior to a high-quality Argos location estimate have occurred in other studies [4, 6, 15,16,17,18], indicating that the methods described here may have application across a variety of species and areas.
The pop-up location 95% error ellipse is an imperfect characterization of true error associated with the estimated pop-up location due to uncontrolled sources of error inherent to Argos estimates and our methods. However, the spatial extent of ellipse coverage failure was typically small: while the ellipse estimates failed to capture 59% of fixed-tag positions, the distance from the fixed position to the ellipse boundary was typically < 2 km, suggesting that the ellipse still provides a useful approximation of error. The Argos-reported 63% error ellipse only accounts for error determined via the positioning algorithm and likely underestimates true error [5, 19]. Further, because our combination of Argos error ellipses does not account for differences in drift speed and direction between the target tag or proxy tag drift segments and the target tag unknown drift segment, additional error likely exists, the magnitude of which is proportional to drift duration. Thus, longer drifts inherently have larger error, as supported by our results: error ellipses associated with shorter drifts were more likely to capture the tag’s fixed position. We attempted to account for some of the additional error sources by scaling up from the 63% Argos-reported error ellipses to a composite 95% error ellipse. Although the 95% ellipse likely accounts for some of the additional error, it is still generally an underestimate and should not be interpreted as a probability contour.
Optimal pop-up location estimation method depends on the magnitude of drift error. The target-tag method should be limited to tags with small drift error because there is greater opportunity for changes in wind, waves, and surface current vectors over extended drifts which could result in inaccurate pop-up location estimates. For example, truncating just the first 3 h of drift locations for the tag in Fig. 2b would alter the estimated direction of the unknown vector (\({P}_{0}{P}_{1}\)) by 67° and the distance by 6.4 km. Emergence location accuracy was shown to decrease up to four times when the first 16 h of drift data were removed [18] further highlighting potential risk in applying the target-tag method over long drifts. We attempted to improve estimates through the time and location criteria used for selecting the target tag’s second drift location but prefer the proxy tag method when possible. The proxy-tag method is more appropriate for tags with large drift error because the proxy tag’s drift segment and the target tag’s unknown drift segment overlap temporally so that there is a greater chance of consistency in drift speed and direction between them. Because spatial differences in drift patterns between proxy and target tags could exist, one would expect the closest proxy tag to provide the best results. However, we found little evidence of this, which may imply that generally uniform surface conditions occurred over an approximately 30–60 km resolution within the study areas.
Our estimation methods expand upon previously published methods. Several studies corrected only tags that released prematurely and had extended drifts, provided few details on the magnitude of estimated drift error, and did not consider the Argos error ellipse [11, 12, 14, 15]. In addition, no verification of pop-up location accuracy was performed and it is likely that large estimate error (potentially exceeding drift error) occurred given information on extended transmission delays [18]. Drift error may have been mostly ignored due to the magnitude of average animal displacement estimates: 441–1217 km (approximately 10–26 times greater than that observed here for RKC); however, in one case, drift error was estimated at 14–38% of estimated displacement [14], similar to that observed for RKC. Estimated drift error has also been used to inform positional error estimates without estimating pop-up location. Drift speed and direction between Argos LC 1–3 locations informed a triangular error estimate of plausible drift vectors prior to a high-quality Argos location estimate [17], though it was unclear exactly how the error estimate was determined and no validation was performed. An alternative approach was used for porcupine crab where terminal position was estimated as the first LC 3 location while estimated drift error (based on all LC 1–3 locations) determined the radius of an error circle [4]. A similar error estimate was used for Atlantic salmon Salmo salar [16], but drift error was estimated based on a shorter, targeted drift period rather than the average drift speed from the tag’s entire drift trajectory. It is possible that resulted in a more accurate error estimate, but no validation of the error circle was performed in either case.
The methods we describe or others which directly estimate pop-up or emergence location [18] and associated positional error may be more accurate over a wide range of drift error than those which use an uncorrected LC 1–3 location to estimate the host animal’s terminal position. Using an early LC 3 location and associated error circle is likely safe for small drift error; however, in the case of large drift error, the tag has likely drifted far enough that the error circle does not capture the true pop-up location. Although using estimated drift error to expand the error circle [4] may capture the true pop-up location, error may be more roughly approximated as Argos positional error is better characterized by the anisotropic error ellipse than the error circle due to the polar orbits of satellites [5, 20].
We achieved estimation accuracy similar to that of time-reversed state-space modeling of tag drift trajectory, though our methods were tested across more variable conditions. Emergence locations estimated using state-space modeling were reasonably accurate, but ocean conditions were calm and time at liberty was less than one day [18]. Our methods performed well across a wider range of conditions and deployment lengths and the proxy-tag method was able to achieve reasonable estimate accuracy (i.e., within 4.8–6.5 km) when tags drifted more than 16 h prior to a high-quality Argos location estimate. For emergence location estimates, mean site-based estimate error ranged 6.4–11.8 km when the first 16 h of location data were truncated [18]. While this suggests the proxy-tag method may better handle extended drifts, this should be confirmed with additional testing. Because the proxy-tag method relies on the assumption that groups of tags will surface sequentially and in proximity to each other, it may be impractical for studies with a small sample size and/or those involving highly mobile, non-aggregative species. Nevertheless, this approach is promising for crab research and accordingly, our strategy employs staggered pop-up dates and a 60 km threshold for selecting proxy tags.
The difference in PSAT performance between RKC deployments is not unexpected. Variable performance has been observed for other crab and fish species [4, 6, 7, 22,23,24], in some cases due to a high premature release rate [4, 7, 23]. We observed low rates of premature release for RKC here, but variability in previous crab studies was likely due to project timing relative to molting patterns. More premature releases were observed in a RKC study that encompassed a portion of the likely molting season (L. S. Zacher, National Marine Fisheries Service, personal communication) and a lower premature release rate was observed for terminally molted Tanner crab [6] compared to crab which do not terminally molt [4]. Tag performance can also vary within a deployment [6] which implies the influence of factors such as area, season, and time at liberty. Physical conditions on the ocean bottom (substrate type, ocean corrosivity, etc.), biological factors (biofouling, crab activity levels, conspecific agonistic interactions, predation), and surface conditions (wind speed, wave height, and surface current) can vary by area or season and could affect tag integrity and message reception rate. For these reasons, success rate can be unpredictable; we observed a high success rate and limited drift error estimates in 2020, but the opposite was true in 2021. Tags deployed in 2021 drifted at a faster rate, likely due to a strong weather system that was forecasted at the time of surfacing: turbulent surface conditions may have reduced message reception and thus increased drift error. Although a high success rate is possible for PSATs deployed on RKC, it may be difficult to predict and conservative estimates (e.g., approximately 50% success) may be warranted when considering tagging goals.
Conclusions
The rapid environmental change in the Bering Sea [25] and resulting impacts on crab populations (e.g., [26]) has initiated a “call to arms” for improved conservation. The sudden and dramatic collapse of Bering Sea snow crab requires refined spatial management to protect the remnants of the population. High-resolution seasonal movement information is needed to inform the size and placement of management units for the directed fishery and to create dynamic closure areas for bycatch fisheries. Similarly, information on intra-annual shifts in red king crab spatial distribution in relation to groundfish fishing activity is needed to inform the importance and placement of any additional conservation areas, particularly for times when red king crab are most vulnerable, such as during molting and mating [27]. Enhanced PSAT utility will allow for better understanding of Bering Sea crab behavior and spatial dynamics and aid in developing more adaptive management practices. We offer methods that correct tag drift error and ultimately improve accuracy of animal terminal position estimates, which is especially important for crabs and other slow-moving species.
Notes
Data were collected and processed by the NOAA/PMEL EcoFOCI research project as part of their long-term oceanographic research in the eastern Bering Sea and the Gulf of Alaska.
Abbreviations
- PSAT:
-
Pop-up satellite archival tag
- RKC:
-
Red king crab
- EBS:
-
Eastern Bering Sea
References
Lutcavage ME, Brill RW, Skomal GB, Chase BC, Howey PW. Results of pop-up satellite tagging of spawning size class fish in the Gulf of Maine: do North Atlantic bluefin tuna spawn in the mid-Atlantic? Can J Fish Aquat Sci. 1999. https://doi.org/10.1139/f99-016.
Domeier ML, Nasby-Lucas N. Migration patterns of white sharks Carcharodon carcharias tagged at Guadalupe Island, Mexico, and identification of an eastern Pacific shared offshore foraging area. Mar Ecol Prog Ser. 2008. https://doi.org/10.3354/meps07628.
Neilson JD, Loefer J, Prince ED, Royer F, Calmettes B, Gaspar P, Lopez R, Andrushchenko I. Seasonal distributions and migrations of northwest Atlantic swordfish: inferences from integration of pop-up satellite archival tagging studies. PLoS ONE. 2014. https://doi.org/10.1371/journal.pone.0112736.
Davidson ER, Hussey NE. Movements of a potential fishery resource, porcupine crab (Neolithodes grimaldii) in Northern Davis Strait, Eastern Canadian Arctic. Deep-Sea Res I. 2019. https://doi.org/10.1016/j.dsr.2019.103143.
Lopez R, Malardé J-P, Royer F, Gaspar P. Improving Argos Doppler location using multiple-model Kalman filtering. IEEE Trans Geosci Remote. 2014. https://doi.org/10.1109/TGRS.2013.2284293.
Nault A, Vanek V, Daly B. Results of the 2019 Bering Sea Tanner crab Chionoecetes bairdi tagging study. Alaska Department of Fish and Game. 2022; Fishery Data Series No. 22-02. https://www.adfg.alaska.gov/FedAidPDFs/FDS22-02.pdf. Accessed 4 December 2023.
Courtney MB, Scanlon BS, Rikardsen AH, Seitz AC. Utility of pop-up satellite archival tags to study the summer dispersal and habitat occupancy of Dolly Varden in Arctic Alaska. Arctic. 2016. https://doi.org/10.14430/arctic4561.
Brown J, Brickle P, Scott BE. Investigating the movements and behaviour of Patagonian toothfish (Dissostichus eleginoides Smitt, 1898) around the Falkland Islands using archival tags satellite linked. J Exp Mar Biol Ecol. 2013. https://doi.org/10.1016/j.jembe.2013.02.029.
Gatti P, Fisher JAD, Cyr F, Galbraith PS, Robert D, Le Bris A. A review and tests of validation and sensitivity of geolocation models for marine fish tracking. Fish Fish. 2021. https://doi.org/10.1111/faf.12568.
Loher T, Seitz AC. Seasonal migration and environmental conditions experienced by Pacific halibut in the Gulf of Alaska, elucidated from pop-up archival transmitting (PAT) tags. International Pacific Halibut Commission. 2006; Scientific Report No. 82. https://iphc.int/uploads/pdf/sr/IPHC-2006-SR082.pdf. Accessed 4 December 2023.
Afonso AS, Hazin FHV. Post-release survival and behavior and exposure to fisheries in juvenile tiger sharks, Galeocerdo cuvier, from the South Atlantic. J Exp Mar Biol Ecol. 2014. https://doi.org/10.1016/j.jembe.2014.02.008.
Amilhat E, Aarestrup K, Faliex E, Simon G, Westerberg H, Righton D. First evidence of European eels exiting the Mediterranean Sea during their spawning migration. Sci Rep. 2016. https://doi.org/10.1038/srep21817.
Carlson JK, Ribera MM, Conrath CL, Heupel MR, Burgess GH. Habitat use and movement patterns of bull sharks Carcharhinus leucas determined using pop-up satellite archival tags. J Fish Biol. 2010. https://doi.org/10.1111/j.1095-8649.2010.02707.x.
Chittenden CM, Ådlandsvik B, Pedersen O-P, Righton D, Rikardsen AH. Testing a model to track fish migrations in polar regions using pop-up satellite archival tags. Fish Oceanogr. 2013. https://doi.org/10.1111/fog.12000.
Westerberg H, Amilhat E, Wahlberg M, Aarestrup K, Faliex E, Simon G, Tardy C, Righton D. Predation on migrating eels (Anguilla anguilla L.) from the Western Mediterranean. J Exp Mar Biol Ecol. 2021. https://doi.org/10.1016/j.jembe.2021.151613.
Godfrey JD, Stewart DC, Middlemas SJ, Armstrong JD. Depth use and migratory behaviour of homing Atlantic salmon (Salmo salar) in Scottish coastal waters. ICES J Mar Sci. 2015. https://doi.org/10.1093/icesjms/fsu118.
Hussey NE, Orr J, Fisk AT, Hedges KJ, Ferguson SH, Barkley AN. Mark report satellite tags (mrPATs) to detail large-scale horizontal movements of deep water species: first results for the Greenland shark (Somniosus microcephalus). Deep-Sea Res I. 2018. https://doi.org/10.1016/j.dsr.2018.03.002.
Brown CL, Horning M, Bishop AM. Improving emergence location estimates for Argos pop-up transmitters. Anim Biotelemetry. 2019. https://doi.org/10.1186/s40317-019-0166-6.
Boyd JD, Brightsmith DJ. Error properties of Argos satellite telemetry locations using least squares and Kalman filtering. PLoS ONE. 2013. https://doi.org/10.1371/journal.pone.0063051.
McClintock BT, London JM, Cameron MF, Boveng PL. Modelling animal movement using the Argos satellite telemetry location error ellipse. Methods Ecol Evol. 2015. https://doi.org/10.1111/2041-210X.12311.
Coachman LK, Charnell RL. On lateral water mass interaction—a case study, Bristol Bay. Alaska J Phys Oceanogr. 1979. https://doi.org/10.1175/1520-0485(1979)009%3c0278:OLWMIC%3e2.0.CO;2.
Seitz AC, Loher T, Norcross BL, Nielsen JL. Dispersal and behavior of Pacific halibut Hippoglossus stenolepis in the Bering Sea and Aleutian Islands region. Aquat Biol. 2011. https://doi.org/10.3354/ab00333.
Bryan DR, McDermott SF, Nielsen JK, Fraser D, Rand KM. Seasonal migratory patterns of Pacific cod (Gadus macrocephalus) in the Aleutian Islands. Anim Biotelemetry. 2021. https://doi.org/10.1186/s40317-021-00250-2.
Musyl MK, Domeier ML, Nasby-Lucas N, Brill RW, McNaughton LM, Swimmer JY, Lutcavage MS, Wilson SG, Galuardi B, Liddle JB. Performance of pop-up satellite archival tags. Mar Ecol Prog Ser. 2011. https://doi.org/10.3354/meps09202.
Huntington HP, Danielson SL, Wiese FK, Baker M, Boveng P, Citta JJ, De Robertis A, Dickson DMS, Farley E, George JC, Iken K, Kimmel DG, Kuletz K, Ladd C, Levine R, Quakenbush L, Stabeno P, Stafford KM, Stockwell D, Wilson C. Evidence suggests potential transformation of the Pacific Arctic ecosystem is underway. Nat Clim Change. 2020. https://doi.org/10.1038/s41558-020-0695-2.
Szuwalski CS, Aydin K, Fedewa EJ, Garber-Yonts B, Litzow MA. The collapse of eastern Bering Sea snow crab. Science. 2023. https://doi.org/10.1126/science.adf6035.
Cunningham S, Cates K. Bristol Bay red king crab expanded information. North Pacific Fishery Management Council. 2022; D2 BBRKC expanded discussion paper. https://meetings.npfmc.org/CommentReview/DownloadFile?p=d26d1383-cd85-4545-b4e7-29d402f414bf.pdf&fileName=D2%20BBRKC%20Discussion%20Paper.pdf. Accessed 11 January 2024.
Acknowledgements
We would like to thank Scott Goodman (BSFRF) and Leah Zacher (NMFS) for facilitating vessel charters, Captain Jerry Meals and crew of the FV Provider and Captain Dany Stihl of the FV New Song for sharing their local knowledge and fishing expertise, and Chris Long (NMFS), Jared Weems (ADFG), Madison Heller-Shipley (NRC), and Charlie Heller (NRC) for assistance with tag deployment. Matthew Rutishauser at Wildlife Computers, Inc. provided valuable technical support. We also thank Chris Siddon (ADFG) and two anonymous reviewers for providing thoughtful feedback which greatly improved the manuscript.
Funding
Funding for this research came from the Bering Sea Test Fish Project, authorized by the State of Alaska under the Test Fish Program (AS 16.05.050 (14)), National Oceanic and Atmospheric Administration (NOAA) Awards NA20NMF4370088, NA21NMF4370034, and NA22NMF4370083, the Bering Sea Fisheries Research Foundation (BSFRF), and the NOAA National Marine Fisheries Service Alaska Fisheries Science Center (NMFS–AFSC) Cooperative Research Program.
Author information
Authors and Affiliations
Contributions
AN, BD, and VV, designed the research and AN and VV deployed tags. AN and WG developed and executed the data analysis methods. WG coded the analysis functions. AN, WG, and BD wrote and edited the manuscript and VV provided edits. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Capture, handling, and tagging of crab was conducted under authorization of Alaska Department of Fish and Game Aquatic Resource Permits CF-20-59 and CF-21-102 governed by 5AAC 41.005–41.600. In addition, efforts were made to follow best practices outlined in American Fisheries Society Guidelines for the Use of Fishes in Research (https://fisheries.org/docs/policy_useoffishes.pdf; Chapters V and VI, where applicable).
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Additional file 1.
PSAT attachment method. Images of the PSAT attachment method used for red king crab.
Additional file 2.
Estimation of satellite tag pop-up location error. Description of the calculations used to estimate pop-up location error ellipses.
Additional file 3.
Estimation of satellite tag pop-up location using a collection of customized R functions. Description and example application of R functions used to automate pop-up location and error ellipse estimation.
Additional file 4.
Satellite tag analysis functions. Collection of customized R functions used to estimate pop-up location and associated error.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Nault, A.J., Gaeuman, W.B., Daly, B.J. et al. Estimation of pop-up satellite archival tag initial surface position: applications for eastern Bering Sea crab research. Anim Biotelemetry 12, 7 (2024). https://doi.org/10.1186/s40317-024-00360-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40317-024-00360-7