
Abstract
Background
Many regions of the ocean are under-sampled in terms of their biology and physical structure. Increasingly sophisticated animal-borne electronic tags are capable of measuring and transmitting in situ environmental data such as ocean temperature–depth profiles. This has the potential to significantly augment the volume of data acquired from under-sampled regions of the ocean. These data would enhance interpretation of animal behavior and distribution and could be used to inform oceanographic and meteorological models. Building on results obtained from marine mammals and turtles, we present a case study of depth–temperature profiles obtained from a tagged tiger shark.
Results
During a 102-day deployment, 1350 geolocations were obtained from a shark from waters around Oahu, Hawaii. Of these, 520 were associated with depth–temperature profiles—some of which were from depths exceeding 500 m. Delay between profile creation and transmission to satellite or land-based receiver averaged 8.9 h (range: 35 s–43 h, median 6.32 h). The profiles were in close agreement with profiles extracted from nearby locations in an operational ROMS model. Land-based receivers played a significant role in augmenting data throughput obtained via satellites.
Conclusions
Shark-borne transmitters offer a viable option for collecting ocean profiles with reporting latencies that make them suitable for operational oceanography. They can significantly increase sampling frequency (especially subsurface) and sample geographic areas that are otherwise difficult to monitor with Lagrangian methods such as Argo floats. They sample locations and depths that are important to the animal and which in some cases may be biological hotspots. The resolution of the data is comparable with that derived from traditional platforms. By targeting appropriate species of shark, different areas of the ocean could be monitored at significantly higher rates than is currently the case.
Similar content being viewed by others


Background
The emergence of increasingly sophisticated electronic tracking devices (“tags”) has allowed the field of marine animal telemetry to go beyond simply providing habitat selection and movement data and move into the realm of measuring, recording, and transmitting in situ environmental information. These environmental data enhance interpretation of animal behavior and distribution and can also be directly useful to physical oceanographers and meteorologists. Animal-borne sensors can significantly augment observations obtained from traditional platforms (e.g., drifters, gliders, buoys, satellites) and this is especially true for locations that are difficult to monitor. These include areas that are seasonally ice-covered or remote and difficult to access (e.g., the Southern Ocean) and coastal shelf regions and boundary currents that are too shallow or too dynamic for devices such as profiling floats and drifters. These regions are under-sampled [1] and yet are also among the areas that are changing fastest. Even in locations such as the Hawaiian Islands which, conceptually, have access to modern monitoring technologies, in situ ocean observations are extremely scarce (Fig. 1). While surface measurements are available through remote sensing (satellites, aerial imaging, surface radars, etc.), the subsurface remains vastly under-sampled.

Cumulative total ocean observations in the Hawaiian Islands over a 62-year period (1955–2017) from the World Ocean Atlas (WOA-18). There are very few observations from locations other than cabled mooring Station ALOHA north of Kauai and the southern shore of Oahu (yellow boxes) and even in the latter case, empirical subsurface measurements are currently very scarce
Animal-borne sensors could significantly augment ocean observing [9] and the importance of animal-borne sensors to expanding the volume and areal coverage of measurements of Essential Ocean Variables (EOV) has been recognized by the Global Ocean Observing System (GOOS) by officially designating the Animal-Borne Ocean Sensor Network (AniBOS) as an Emerging Network within the GOOS structure [11]. Animal-borne ocean sensor packages were pioneered through deployments on marine mammals such as seals [10, 16, 18]. Marine mammals offer the twin advantages of having to come to the surface regularly to breath (and can therefore transmit to satellite) and some species often return to the same haul out sites where packages can be retrieved to download archived data and to conduct post-deployment sensor recalibration [15]. Similarly, turtles dive but also spend considerable time at the surface and can provide salient oceanographic data [2, 13].
Deploying satellite-linked archiving tags on fishes to provide operational ocean profile data is complicated by two factors. First, fishes do not need to come to the surface and, when they do, the duration of those events may be very brief. Second, long-term deployments are difficult to achieve due to limited options for attaching the tags to the animals. Among the fishes, sharks offer the advantage of having rigid dorsal fins to which tags can be temporarily attached—a characteristic shared only by swordfish (Xiphias gladius). Depending on the species chosen, sharks tend to select regions that are difficult to access using traditional platforms and, although there are exceptions, they tend to sample deeper parts of the ocean than seals and turtles. Here, as a case study, we present results from a single 102-day duration deployment on a tiger shark to demonstrate the type and quantity of behavioral and oceanographic data that can be obtained from sharks.
Methods
SCOUT-Bathygraph tags (Wildlife Computers Inc., Redmond, WA) are data archiving tags that transmit data through the Argos satellite system. Unlike previous generations of tags (e.g., SPOT tags [Wildlife Computers Inc. Redmond]) that simply indicate an animal’s position through Argos Doppler estimation, the bathygraph tags acquire, archive and transmit depth and temperature data and have Fastloc® GPS capability. The latter is a geolocation estimation method that requires only a very brief exposure to take a “snapshot” of the visible GPS satellites. This snapshot is then used in post-processing to determine geographical position. In the case reported here, the tag was attached to a 2.9-m FL female tiger shark (Galeocerdo cuvier) caught and tagged on the windward coast of Oahu, Hawaii, on April 28, 2021, as part of an ongoing program of deploying bathygraph tags on tiger sharks in Hawaiian waters. The tag was attached using corrosible bolts passed through the dorsal fin [12].
The brevity of surfacing events and the limitations imposed by the comparatively low data throughput currently available via the Argos satellite system (~ 31 bytes/message, one message every 10–60 s and approximately only 20% satellite coverage time per day in Hawaii) require considerable onboard processing of the raw data and compromises must be made regarding the precision of the data that are uploaded and which types of ‘summary data’ are transmitted [5, 6]. Accordingly, even though the temperature and depth sensors have resolutions of 0.05 °C and 0.5 m, respectively, the transmitted resolutions are 0.1C and the depths are assigned to 8 m ‘bins’. Similarly, even though tag sensor data are sampled and stored once per second, for the purposes of satellite transmission, onboard processing performs an 11-point ‘broken stick’ analysis of the stored temperature/depth data (sensu [5, 6] 8]. Serendipitous recovery of a SCOUT Bathygraph tag (from a different shark) after a deployment of 6 months allowed post-deployment testing of the depth and temperature sensors. The results indicated that both sensors were still within manufacturer specification (Additional file 2: Table S1). Also, application of broken stick profiles to archived data from tags from the same manufacturer and using the same algorithm show that the technique accurately captures the raw temperature profiles (Additional file 1: Figure S1).
The tags have several user-definable functions. These include the maximum age of the temperature and depth profiles that will be transmitted (4 d in our case, after which they are removed from the queue), the minimum depth of dive required to trigger creation of a profile (in our case, 90 m) and the time elapsed between adjacent inflection points of the broken stick profile (see below) before a ‘discontinuity’ is declared (in our case, 1 h).
The tag generates broken stick profiles when the animal goes deeper than the user-defined threshold depth. Depth and temperature readings are sampled and stored at 1-s intervals. Once the animal reaches the surface, the tag creates an 11-point depth–temperature profile using a broken stick algorithm that captures temperature inflection points and includes the deepest and surface points. The profile is time-stamped with the time of the surface point. The tag also attempts to take a Fastloc® GPS snapshot after the profile is created. The Fastloc® snapshot is also time-stamped. The profiles and Fastloc® snapshots are stored as messages in a buffer for transmission, dropping out of the buffer once they reach the maximum age. During animal surfacing events, the tag cycles through the messages in the buffer and transmits them using an algorithm that prioritizes transmitting archived profiles with the fewest attempted transmissions—which typically means the profile that has just been created goes first. Depending upon the animal behavior, number of profiles collected and the Argos satellite coverage, some collected profiles and snapshots may not be received before they expire. Land-based receivers (Wildlife Computers Motes) tuned to the Argos frequency can significantly increase the number of received messages [7].
Because the SCOUT-Bathygraph tag is designed for non-airbreathers, an essential component of the onboard processing is the creation of the ‘virtual upcast’, whereby the temperature value for any given depth bin is refreshed (overwritten) every time the animal passes through that depth—either in ascent or descent. Thus, the values used to construct the ‘broken stick’ profile when the tag breaks the surface are the most recent temperatures associated with any given depth (Additional file 1: Figure S2). Because of data transmission constraints, time stamps are only available for the surface point (± 5 min) and the deepest point of each profile (± 15 min). Nevertheless, this allows for reasonable estimation of the time over which each profile is generated. Further, a ‘discontinuity flag’ is attached to a depth–temperature point if more than one hour elapsed between that point and the next shallower inflection point (Additional file 1: Figure S3). If there are no discontinuities in a transmitted broken stick curve, all depth–temperature points were collected less than an hour prior to the point immediately above it (i.e., shallower). It is possible that in the future these parameters could be adjusted to meet the specific needs of the end user. The profiles generated by the shark-borne tag were compared with profiles generated by the local Regional Ocean Model System which has been shown to effectively represent regional ocean structure [14] [see Additional Information]).
Results
The results presented here are from a prototype SCOUT Bathygraph tag (Wildlife Computers Inc, Redmond, WA) attached to the dorsal fin of a 2.9-m FL female tiger shark (Galeocerdo cuvier). Over a reporting period spanning 102 days, the tag provided 1133 Argos satellite system Doppler-derived geographical locations and 217 Fastloc® GPS locations. An array of three land-based receivers (Wildlife Computers’ “Motes” [7] on the island of Oahu detected and relayed 1829 transmissions. In total, 520 ocean temperature profiles were received with some originating at depths of over 500 m. The shark’s locations over the duration of the deployment and the subset of locations with associated ocean temperature profiles are shown in Fig. 2. The latency between generation of the temperature profile and reception by an Argos satellite averaged 8.9 h but with a very wide range (35 s to 43 h, median 6.9 h.). Average latency was shorter for profiles transmitted via land-based Motes (mean 7.6 h, range: 28 s–39 h median 5.6 h). Virtual upcast temperature profiles were typically generated over period of a few hours but many were constructed within the minimum resolution constraints of the transmitted data (i.e., 15 min ± 15 min; Additional file 1: Figure S4).

All locations obtained during 102-day deployment. Locations from which profiles were obtained are marked in blue
Discussion
We demonstrate that shark-borne tags equipped with environmental sensors can provide large volumes of oceanographic data from important, yet under-sampled regions of the ocean. These profiles were reported with accuracies and latencies appropriate for operational oceanography. In the case described here, an average of five profiles per day were received from coastal areas around the island of Oahu. These in situ empirical data align well with ocean profiles generated by high-resolution models that are typically only well constrained at the surface because most observations currently assimilated into these models derive from satellites and surface platforms. Shark-borne tag data could provide models with much needed subsurface observations, the impact of which is the focus of ongoing research. Miyazawa et al. [13] have demonstrated the utility of this approach with data obtained from packages attached to turtles. Sharks offer an intermediate approach between Lagrangian observation methods (e.g., Argo floats) and fixed moorings.
It is envisioned that data from shark-borne packages will be passed to the Animal Tracking Network (ATN) Data Assembly Center (DAC) and from there to the Global Telemetry System (GTS) of the World Meteorological Office (WMO). Many operational oceanographic and meteorological models rely on data from the GTS and efforts are underway to standardize animal-derived data to expedite their assimilation into the system [17]. Depending on satellite and Wildlife Computers Mote coverage, it is possible for data transmitted from a shark to be processed by the Wildlife Computers Data Portal and exported to the DAC or other data assembly sites (such as PacIOOS) with a latency of as little as 15 min. Various shark species display extensive vertical behaviors in a wide variety of locations and many of these species periodically come to the surface where they could uplink ocean profiles. Targeting specific species of sharks could expand ocean profile frequency from targeted regions of the ocean. For instance, tagging blue sharks (Prionace glauca) would result in profiles from offshore (‘blue water’) locations [4, 19].
There will be variability in the duration of the deployments, the amount of data received from shark-borne packages, the time over which a profile is generated and the latency between when profiles are created and their successful transmission. The example described here demonstrates that tiger sharks come to the surface frequently, but previous research has shown inter-individual differences in surfacing frequency [12]. The volume of data throughput will also be influenced by whether the surfacing events occur within the detection footprint of a Mote. These devices have been shown to facilitate a minimum fivefold increase in data throughput and have detection footprints up to 3564 km2 depending on the height and configuration of the installation [7]. In this case reported here, the animal spent large amounts of time within the detection footprint of Motes on Oahu and this resulted in high throughput via this pathway. However, subsurface profile data (both coastal and offshore) are so scarce that data transmitted only via satellite would still represent a significant sampling enhancement. Higher latitudes have better satellite coverage with commensurate improvement in satellite data throughput. A fivefold increase in the number of Argos satellites is planned for 2023. This will significantly increase the coverage and data throughput worldwide and reduce the latency between when a profile is generated and when it is received by a satellite.
Because of the limited data transfer rate to Argos satellites and potentially brief surfacing events, certain data ‘compression’ or coding protocols must be performed by the tag. One consequence of the compression is that only the timestamp of the surface point (end of upcast) and the deepest point of the profile are transmitted—there are no time stamps associated with the intermediate inflection points in the profile. However, the current protocol does give good estimation of the period over which a profile was collected. Additionally, a ‘discontinuity flag’ identifies any inflection point that was recorded more than one hour before the inflection point above it (shallower).
Tag-based temperature profiles compare favorably to model-derived temperatures (Figs. 3, 4), but differences remain—particularly at depth (Fig. 3, Profile 11). More investigation is needed to determine the sources of differences between the shark-derived data and the ROMS data as shown in Fig. 4. They could be due to deficiencies in the model—perhaps due to its emphasis on surface measurements—or the complexity of the environment being sampled. Also, profiles generated over long periods of time could allow the shark to move from one body of water to another before it surfaced and generated a profile. However, users of data from animal-borne platforms can selectively use profiles generated over short time spans and the > 1 h discontinuity threshold could be shortened in future deployments. This would result in finer temporal resolution in the broken stick curves. Obviously, more analyses are needed to refine the ways in which shark-derived data can be integrated into oceanographic models, but the closeness of fit between the tag data and ROMS models suggests that this is a profitable avenue to pursue.

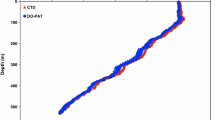
Illustrates comparisons of uplinked profiles with profiles extracted from the nearest model grid point from an operational model, in this case the Regional Ocean Modeling System (ROMS) run daily by the Pacific Islands Ocean Observing System (PacIOOS). Preliminary comparisons of all transmitter-derived data to a regional model show these data to agree at first order (Fig. 4) indicating that they have the potential to further constrain (via assimilation) or validate the model in these regions. Comparison of two representative shark tag profiles with ROMs profiles for the same location. Profile 11 (top) created over a period of 4.5 h originated at 464 m and was linked with a Fastloc GPS location (21.1152 N; –157.7643 W) obtained within 3 min of its creation and derived from 6 GPS satellites which yields a median location accuracy of 30 m [3]. This profile contained no ‘discontinuities’. Profile 275 (bottom) was generated over a period of 5 h and linked to an Argos ‘quality 0’ location estimate obtained 15 min after profile generation. Uplink latency was 2.5 h

Comparison of all temperatures obtained from the shark-borne tag with ROMS temperatures taken from model grid points spanning the location of each shark derived profile
Conclusions
Shark-borne sensor packages can provide large volumes of in situ environmental data that are of sufficient resolution, accuracy and reporting latency to be used in operational oceanographic modeling. Sharks inhabit regions of the ocean that are not easily or frequently sampled by other methods (except satellite surface imagery) which enhances the importance of the data that they produce. They offer an intermediate sampling regime that is not Lagrangian (e.g., Argo floats) but wider ranging than fixed moorings. Also, the data are collected from locations and depths that are part of the animal’s preferred habitat. Protocols are being established that will allow these environmental data to be automatically distributed to the user community. The advent of the significantly improved Argos satellite coverage will allow data collected by sharks to be transmitted and received in near-real-time. Specific regions of the ocean could be targeted by selecting the appropriate shark species.
Availability of data and materials
The datasets used and/or analyzed during the current study are available from the corresponding author on reasonable request.
Abbreviations
- AniBOS:
-
Animal-Borne Ocean Sensor Network
- ATN:
-
Animal Tracking Network
- AVHHR:
-
Advanced very high-resolution radiometer
- AVISO:
-
Archiving, Validation and Interpretation of Satellite Oceanographic Data
- DAC:
-
Data assembly center
- EOV:
-
Essential ocean variables
- GOOS:
-
Global Ocean Observing System
- GTS:
-
Global Telemetry System
- IACUC:
-
Institutional Animal Care and Use Committee
- MODIS:
-
Moderate-resolution Imaging Spectroradiometer
- OSTIA:
-
Operational sea surface temperature and sea ice analysis
- PacIOOS:
-
Pacific Islands Ocean Observing System
- WMO:
-
World Meteorological Office
- WOA:
-
World Ocean Atlas
References
Abraham JP, Baringer M, Bindoff NL, Boyer T, Cheng LJ, Church JA, Conroy JL, Domingues CM, Fasullo JT, Gilson J, Goni G, Good SA, Gorman JM, Gouretski V, Ishii M, Johnson GC, Kizu S, Lyman JM, Macdonald AM, Minkowycz WJ, Moffitt SE, Palmer MD, Piola AR, Reseghetti F, Schuckmann K, Trenberth KE, Velicogna I, Willis JK. A review of global ocean temperature observations: implications for ocean heat content estimates and climate change. Rev Geophys. 2013;51:450–83.
Bousquet O, Dalleau M, Bocquet M, Gaspar P, Bielli S, Ciccione S, Remy E, Vidard A. Sea turtles for ocean research and monitoring: overview and initial results of the STORM project in the Southwest Indian Ocean. Front Mar Sci. 2020;7:859.
Dujon AM, Lindstrom RT, Hays GC. The accuracy of Fastloc-GPS locations and implications for animal tracking. Methods Ecol Evol. 2014;5(11):1162–9.
Elliott RG, Montgomery JC, Della Penna A, Radford CA. Satellite tags describe movement and diving behaviour of blue sharks Prionace glauca in the southwest Pacific. Mar Ecol Prog Ser. 2022;12(689):77–94.
Fedak MA, Lovell P, Grant SM. Two approaches to compressing and interpreting time-depth information as collected by time-depth recorders and satellite-linked data recorders. Mar Mammal Sci. 2001;17:94–110.
Fedak M, Lovell P, McConnell B, Hunter C. Overcoming the constraints of long range radio telemetry from animals: getting more useful data from smaller packages. Integr Comp Biol. 2002;42(1):3–10.
Jeanniard-du-Dot T, Holland K, Schorr GS, Vo D. Motes enhance data recovery from satellite-relayed biologgers and can facilitate collaborative research into marine habitat utilization. Animal Biotelemetry. 2017;5(1):17.
Lydersen C, Nøst OA, Lovell P, McConnell BJ, Gammelsrød T, Hunter C, Fedak MA, Kovacs KM. Salinity and temperature structure of a freezing Arctic fjord—monitored by white whales (Delphinapterus leucas). Geophys Res Lett. 2002;29(23):34–41.
March D, Boehme L, Tintoré J, Vélez-Belchi PJ, Godley BJ. Towards the integration of animal-borne instruments into global ocean observing systems. Glob Change Biol. 2020;26(2):586–96.
McMahon CR, Roquet F. Animal-Borne ocean sensors: a decadal vision through new eyes. Mar Technol Soc J. 2022;56(3):36–8.
McMahon RC, Roquet F, et al. Animal borne Ocean sensors—AniBOS—a complementary and essential component of the Global Ocean observing system (GOOS). Front Mar Sci. 2021. https://doi.org/10.3389/fmars.2021.751840.
Meyer CG, Anderson JM, Coffey DM, Hutchinson MR, Royer MA, Holland KN. Habitat geography around Hawaii’s oceanic islands influences tiger shark (Galeocerdo cuvier) spatial behaviour and shark bite risk at ocean recreation sites. Sci Rep. 2018. https://doi.org/10.1038/s41598-018-23006-0.
Miyazawa Y, Kuwano-Yoshida A, Doi T, Nishikawa H, Narazaki T, Fukuoka T, Sato K. Temperature profiling measurements by sea turtles improve ocean state estimation in the Kuroshio-Oyashio confluence region. Ocean Dyn. 2019;69(2):267–82.
Partridge D, Friedrich T, Powell BS. Reanalysis of the PacIOOS Hawaiian Island Ocean forecast system, an implementation of the regional ocean modeling system v3.6. Geosci Model Devel. 2019;12(1):195–213. https://doi.org/10.5194/gmd-12-195-2019.
Roquet F, Charrassin JB, Marchand S, Boehme L, Fedak M, Reverdin G, Guinet C. Delayed-mode calibration of hydrographic data obtained from animal-borne satellite relay data loggers. J Atmos Oceanic Tech. 2011;28(6):787–801.
Roquet F, Boehme L, Block B, Charrasin JB, Costa D, Guinet C, Harcourt RG, Hindell MA, Hückstädt LA, McMahon CR, Woodward B. Ocean observations using tagged animals. Oceanography 30(2):139. https://doi.org/10.5670/oceanog.2017.235
Sequeira AM, O’Toole M, Keates TR, McDonnell LH, Braun CD, Hoenner X, Jaine FR, Jonsen ID, Newman P, Pye J, Bograd SJ. A standardisation framework for bio-logging data to advance ecological research and conservation. Methods Ecol Evol. 2021;12(6):996–1007.
Treasure AM, Roquet F, Ansorge IJ, Bester MN, Boehme L, Bornemann H, Charrassin JB, Chevallier D, Costa DP, Fedak MA, Guinet C. Marine mammals exploring the oceans pole to pole: a review of the MEOP consortium. Oceanography. 2017;30(2):132–8.
Vandeperre F, Aires-da-Silva A, Fontes J, Santos M, Serrão Santos R, Afonso P. Movements of blue sharks (Prionace glauca) across their life history. PLoS ONE. 2014;9(8): e103538.
Funding
Funding provided by PacIOOS (www.pacioos.org), which is a part of the U.S. Integrated Ocean Observing System (IOOS®), funded in part by National Oceanic and Atmospheric Administration (NOAA) Awards #NA16NOS0120024 and #NA21NOS0120091 and with in-kind support from Wildlife Computers Inc. Redmond WA.
Author information
Authors and Affiliations
Contributions
KH and CM conceived the experimental design and conducted fieldwork. JP and MH conducted data analysis and interpretation. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
This work was conducted under the terms of University of Hawaii IACUC protocol 05-053-13.
Competing interests
CM and JP declare that they have no competing interests. KH is Co-Editor in Chief for Animal Biotelemetry and MH has ownership interest in Wildlife Computers Inc.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Additional file 1: Figure S1.
Broken Stick algorithm applied to archived depth/temperature and depth/oxygen curves. The broken stick algorithm (“transmitted”) used in the current SCOUT tag implementation is overlaid on the most recent archived profiles of oxygen saturation and temperature from a recovered pop-up tag. In this case, the broken stick curve was fitted with six points as opposed to eleven used in the case reported here. Figure S2. Conceptual rendering of translation of dive behavior into a broken stick temperature profile. In this stylized dive and surfacing event (blue line) temperatures at the same depth (yellow arrows) are overwritten until the last values stored (red numbers) are used to create the virtual upcast temperature profile (red line). Values imported here from the top panel (red dots) are among many hundreds comprising a typical upcast profile. Inflection points on the upcast (blue squares) are used to construct the eleven-point transmitted broken stick profile (black squares, inset). Figure S3. Upcast creation and time discontinuities. Temperatures are recorded every second throughout the dive but only the values in blue are used to create the virtual upcast. Dashed line shows temporal discontinuities. In the current study, any discontinuity greater than 1 h resulted in a ‘discontinuity flag’ appearing in the broken stick profile. Figure S4. Profile 38 was constructed between 0746 and 0801 (i.e., 15 min + 15 min) on 5/12/21 and transmitted from a Fastloc-derived location approximately 1.6 km south of Kewalo Basin, Oahu. The profile originated at 256 m. Assuming the slowest ascent rate (30 min), average ascent rate = 8.5 m/min (2.9 body lengths/min).
Additional file 2: Table S1
. Pre and Post-Deployment sensor calibrations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Holland, K., Meyer, C., Potemra, J. et al. Ocean depth–temperature profiles for operational oceanography from a shark-borne transmitter. Anim Biotelemetry 10, 34 (2022). https://doi.org/10.1186/s40317-022-00306-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40317-022-00306-x