
Abstract
In this paper, the hyperchaos analysis, optimal control, and synchronization of a nonautonomous cardiac conduction system are investigated. We mainly analyze, control, and synchronize the associated hyperchaotic behaviors using several approaches. More specifically, the related nonlinear mathematical model is firstly introduced in the forms of both integer- and fractional-order differential equations. Then the related hyperchaotic attractors and phase portraits are analyzed. Next, effectual optimal control approaches are applied to the integer- and fractional-order cases in order to overcome the obnoxious hyperchaotic performance. In addition, two identical hyperchaotic oscillators are synchronized via an adaptive control scheme and an active controller for the integer- and fractional-order mathematical models, respectively. Simulation results confirm that the new nonlinear fractional model shows a more flexible behavior than its classical counterpart due to its memory effects. Numerical results are also justified theoretically, and computational experiments illustrate the efficacy of the proposed control and synchronization strategies.
Similar content being viewed by others

1 Introduction
Chaos is one of the most prominent features of nonlinear dynamical systems whose state variables are highly dependent on its initial conditions. This dependency leads to the divergent behavior of such systems, the fact which reveals the great importance of detailed study regarding chaotic phenomena. Because of the wide appearance of chaos in different fields such as acoustic and secure communications, physics, biology, economy, etc., many scientists and mathematicians have been dealing with controlling and synchronizing chaotic dynamical systems extensively [1–5]. In [6], using scalar transmitted signal, a new systematic approach was designed to synchronize a class of hyperchaotic systems. In [7], an optimal control scheme was presented for chaotic/hyperchaotic systems by formulating a linear feedback control problem. In [8], two identical hyperchaotic systems were synchronized using a nonlinear control technique, and the stability of the proposed algorithm was proved by using both Lyapunov and Cardono methods. In [9], a parameter observer was investigated in order to identify unknown parameters in hyperchaotic systems, which is needed to design the state-feedback controller. The authors in [10] controlled and synchronized chaotic systems using state-dependent Riccati equations. In [11], the chaotic Lorenz and hyperchaotic Chen systems were considered in the presence of parameter uncertainty and controlled using an adaptive dual synchronization controller. In [12], a terminal sliding model control was applied to the chaotic Chen and hyperchaotic Lorenz systems; then using an adaptive terminal sliding mode control, the authors achieved the aim of synchronization. In [13], considering the stability theory of Lyapunov, the authors synchronized three nonidentical systems of different dimensions.
Recently, the investigation of complex behaviors in biology such as chaos has attracted the attention of biomedical engineers due to the unpredictable characteristics of biological systems [14–16]. In [17], after investigating chaos in the mathematical model of tumor, the authors controlled the chaotic behavior of tumor cells using a non-feedback loop. In [18], the authors designed an optimal drug delivery schedule for the chaotic behavior of tumor cells by minimizing Hamiltonian function; then in [18], they controlled the same system considering uncertainty in the chaotic model of cancer. In [19], the authors discussed the chaotic behavior of Lotka–Volterra biological systems; then they applied an effective control scheme for the purpose of synchronization.
In recent years, a noticeable number of researches have used fractional-order systems due to their memory-oriented features, which makes them more realistic compared to their integer-order counterparts [20–30]. Also, it is very practical to consider chaos and hyperchaos in such systems in order to simulate the complex behavior of real-world phenomena. In [31], the authors synchronized the chaotic behavior of fractional-order systems according to the stability conditions and using a feedback control method. In [32], a control approach and a synchronization strategy were extended for three fractional chaotic maps. In [33], a newly introduced fractional hyperchaotic system was controlled and synchronized by choosing an appropriate Lyapunov function and using state-feedback control computation. In [34], the authors designed a linear feedback controller for the purpose of chaos control; then a control scheme was used to synchronize the chaotic behavior of two identical biological snap oscillators.
Biochemical oscillators play a vital role in biological sciences; for instance, a cardiac conduction system can be considered as a network of self-stimulated elements like sinus or SA node (the first pacemaker), atrioventricular node (AV node), and His–Purkinje system. Because these elements show oscillatory behavior, they can be modeled as nonlinear oscillators. In addition, an external stimulation is entered into the system with regard to the oscillator frequency, which is interpreted as a nonautonomous term in the nonlinear dynamical system [35]. Besides, stabilization techniques have been used to overcome the chaotic oscillations of biological systems. Moreover, synchronization schemes aim to suppress the situation when a short or long spatial scale difference occurs between oscillators. Therefore, the employment of appropriate control actions is essential to synchronize two identical chaotic systems which are highly sensitive to initial conditions. Hence, the problems of stabilization and synchronization have been of great importance from both biological and mathematical points of view. Based on the above-mentioned arguments, this paper introduces an integer-order model as well as a new fractional-order formalism for a nonautonomous cardiac conduction system. The main contributions of the new achievements in this paper are summarized as follows:
-
In this paper, we analyze the hyperchaotic behaviors of the new models and discuss the stability of their equilibrium point.
-
We stabilize the hyperchaotic behaviors of the integer-order model as well the fractional-order formalism by using optimal controllers based on Pontryagin’s maximum principle (PMP).
-
We also synchronize two identical hyperchaotic oscillators in the frameworks of both classical and fractional equations by applying an adaptive controller and an active compensator, respectively.
-
Finally, we present some simulations in order to verify the theoretical analysis.
To the best of our knowledge, the mathematical modeling, hyperchaos control, and synchronization strategies presented in this paper for a cardiac conduction system are new and comprise some valuable information, the fact which makes the obtained results in this paper noteworthy from both biological and mathematical points of view.
The remainder of this paper is organized as follows. In Sect. 2, an integer- and a fractional-order models are introduced for a nonautonomous cardiac conduction system. In Sect. 3, both new models are stabilized by using optimal control strategies. Afterwards, we employ an adaptive control scheme and an active controller for the aim of synchronization in the sense of classical and fractional frameworks, respectively. Finally, some concluding remarks and discussions are stated in the last section.
2 Mathematical model
In this section, the mathematical model of a cardiac conduction system, introduced in [35], is investigated in the sense of both classical and fractional frameworks. As there exists a noticeable similarity between the behaviors of classical Van der Pol oscillators and the qualitative features of some nonlinear biological systems, the Van der Pol equations play a key role in the modeling and simulation of biological oscillatory systems such as heart and lungs in a human body. The Van der Pol equations, which were firstly introduced in [36], are defined as
in which the chaotic or non-chaotic behaviors depend on the values of the parameters α, β, and γ. In the following subsections, we introduce two mathematical extensions of Eq. (1) in the frameworks of integer- and fractional-order calculus to investigate the hyperchaotic cardiac oscillatory behaviors.
2.1 Integer-order case
If we consider the heart in a body as a nonlinear oscillatory system, then the cardiac conduction must be taken into account as a combination of two subsystem oscillators, which refer to arterial sinus node (SA) and atrioventricular node (AV). Also, the third oscillation is worth to be incorporated to simulate complex QRS, which indicates His–Purkinje complex in a biological way. Thus, three oscillators work in combination in order to replicate the heart functionality. As a result, the following extended integer-order model can describe a cardiac conduction system including six types of variables [35]:
in which the pairs \((f_{1},f_{2})\), \((f_{3},f_{4})\), and \((f_{5},f_{6})\) show SA, AV, and His–Purkinje oscillators, respectively. In addition, the parameters \(\beta _{1}\), \(\beta _{2}\), and \(\beta _{3}\) are the frequencies of SA node, AV node, and His–Purkinje complex, respectively, and \(r_{ij}\) shows the coupling coefficient between relevant nodes. The stabilities of limit cycles in the phase portrait of \((f_{1},f_{2})\), \((f_{3},f_{4})\), and \((f_{5},f_{6})\) are denoted by \(\alpha _{1}\), \(\alpha _{2}\), and \(\alpha _{3}\), respectively. The description of all parameters and their values are given in Table 1. Considering the parameter values as mentioned in Table 1 as well as the initial conditions \(F(0)=(f_{1}(0),f_{2}(0),f_{3}(0),f_{4}(0),f_{5}(0),f_{6}(0))=(0.01,0.01,0.01,0.01,0.01,0.01)\), we sketch the simulation results of the aforementioned equations in Figs. 1–2 including two- and three-dimensional phase portraits. Note that the parameters and the initial values are selected such that the considered system depicts hyperchaotic behaviors. In order to show that the nonlinear oscillator (2) is dissipative, i.e., all trajectories narrow down to zero, we consider the vector N and its divergence as follows:
Thus, it can be concluded that all trajectories of the nonlinear biological oscillator (2) are likely to approach a chaotic attractor [37].

Two-dimensional phase planes of the integer cardiac conduction model (2)

Three-dimensional phase planes of the integer cardiac conduction model (2)
Remark 2.1
The dissipative property of a nonlinear biological system can be associated with its memory, the fact which is concluded from the dissipation feature of memory in real-world dynamical events [38].
2.1.1 Equilibrium point and stability
By assuming the parameter values introduced in Table 1, we obtain the unique equilibrium of the hyperchaotic conduction model (2) as follows:
The the Jacobian matrix of system (2) is computed as
where
Thus, the Jacobian matrix at E is acquired by
As can be seen, the equilibrium point E and the related Jacobian matrix depend on time, so some eigenvalues of J depend on time, too, and they are sometimes positive. Therefore, E is an unstable equilibrium point.
2.2 Fractional-order case
Memory effects play an important role in the modeling and simulation of biological phenomena [39]. Due to this noticeable feature, in the following we introduce the fractional-order model of the hyperchaotic conduction system under consideration. To do so, first we define the left Caputo fractional derivative of \(f_{i}(t)\) as follows:
where \(q_{i}\) represents the order of fractional derivative, \(m_{i}\) is the first integer greater than \(q_{i}\), and Γ is the gamma function. Then the fractional-order model of the considered biological system can be formulated by replacing the ordinary derivatives in Eq. (2) by the fractional-order one defined in (9). Thus, the new fractional model is described by
Here, the interpretations of all variables and coefficients are the same as in the classic model (8); thus, the description of all parameters and their values are found again in Table 1.
The above-mentioned equations indicate the memory-oriented features of fractional calculus, which contains time from 0 to t as well as t in their derivatives. Considering the system parameters as introduced in Table 1 and the initial conditions \(F(0)=(0.01,0.01,0.01,0.01,0.01,0.01)\), we apply the predictor-corrector method [40] to solve the fractional-order differential equations (10). The two- and three- dimensional phase planes of the nonautonomous fractional cardiac conduction system are shown in Figs. 3–4, which demonstrate the existence of hyperchaotic attractors in the fractional sense.

Two-dimensional phase planes of the fractional cardiac conduction model (10) for \(q_{i}=0.9\)

Three-dimensional phase planes of the fractional cardiac conduction model (10) for \(q_{i}=0.9\)
2.2.1 Equilibrium point and stability
The equilibrium point of the fractional model (10) and the associated Jacobian matrix, which have been given in Eqs. (5) and (8), respectively, are the same as model (2). The following lemma is also taken into account for investigating the stability of fractional-order mathematical systems.
Lemma 2.1
([41])
The equilibrium point of system (10) is locally asymptotically stable if all eigenvalues of the Jacobian matrix related to the equilibrium point E meet the following inequality:
3 Hyperchaos control and synchronization
This section considers the nonautonomous cardiac conduction system in both forms of integer- and fractional-order models (2) and (10), respectively. In this section, first we design optimal controllers in order to overcome the hyperchaotic oscillators with regard to the PMP [42–44]. Moreover, using the stability Lyapunov theory, we introduce an adaptive controller to synchronize two similar integer-order oscillators. Then the fractional-order model (10) is considered, and an active controller is proposed for the purpose of synchronization in the fractional sense.
3.1 Optimal control
In this section, we stabilize the hyperchaotic behaviors of the integer-order nonautonomous system (2) as well as its fractional-order form by using optimal controllers based on the PMP.
3.1.1 Integer-order case
As previously mentioned, this section aims at optimally controlling the nonlinear cardiac conduction system (2) using the PMP. To this aim, model (2) is rewritten in the following form:
in which \(u_{i}\) is the control input. In addition, the performance index is defined by
where \(v_{i}\geq 0\) and \(w_{i}>0\) are weighting coefficients, \(e_{i}(t)\) is the ith coordinate of the equilibrium E, and \(t_{f}\) is the final time. Note that \(v_{i}\) is chosen in a way that the state variables are likely to converge on E for all \(t\in (0,t_{f})\). Furthermore, \(w_{i}\) is chosen so that the control input does not violate its bounds. The boundary conditions for the states are also considered by
where \(f(0)\) is an arbitrary initial vector, \(f(t) = (f_{1}(t),f_{2}(t),f_{3}(t),f_{4}(t),f_{5}(t),f_{6}(t))\), and E is the unique equilibrium point. The necessary conditions of optimality for the optimal control problem (12)–(14) are obtained by
where \(g_{i}\) denotes the co-state variable. As can be seen, a nonlinear two-point boundary value problem (BVP) is formed by the necessary conditions of optimality (15)–(16) and the boundary conditions (14). Also, the optimal control is computed by
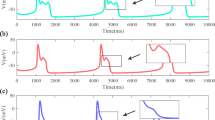
Considering \(t_{f}=5\), \(w_{i}=v_{i}=1\), the parameter values as in Table 1, and the initial conditions \(f_{0}=(0.01,0.01,0.01,0.01,0.01,0.01)\), we solve the aforesaid BVP numerically [45, 46]. In Fig. 5, the state trajectories of the considered system in the absence and the presence of control are compared. It is obvious that the state variables converge and stay near the origin.

The state variables of the integer-order cardiac conduction system (2) in the absence and the presence of the proposed optimal controller
3.1.2 Fractional-order case
In this section, we propose an optimal chaos controller in order to diminish the hyperchaotic behaviors of the nonautonomous cardiac conduction system modeled by the fractional-order dynamical equations (10). To do so, consider the controlled fractional-order model as follows:
The purpose is to obtain the optimal control \(u^{*}(t)\) along with minimizing the objective functional (13). In order to solve the above-mentioned fractional optimal control problem, we should derive the associated necessary optimality conditions. For this purpose, considering the fractional optimal control theory, we have the following scaler Hamiltonian function:
where \({M}_{0}\) is the integrand function in (13), \({M}_{i}\) is the right-hand side of the ith equation in (18), and \(g_{i}\) is the Lagrange multiplier also known as the costate variable. Following [47–49], the necessary optimality conditions of the aforesaid problem are obtained as follows:
together with the initial values \(f(0)=f_{0}\) and the transversality conditions \(g_{i}(t_{f})=0\), \(i=1,\ldots 6\), where \({}_{t}^{C}\mathscr{D}_{t_{f}}^{q_{i}}\) denotes the right Caputo fractional derivative. In order to solve Eqs. (20) and (21), we utilize the proposed numerical approach in [47], which is a combination of a developed predictor-corrector method and a forward-backward sweep iterative algorithm. Simulation results in Fig. 6 illustrate that the hyperchaotic behaviors of the fractional-order cardiac conduction system (10) are controlled via the presented fractional-order optimal controller, so the controlled fractional system reveals stable periodic solutions.

The state variables of the fractional-order cardiac conduction system (10) with \(q_{i}=0.9\) in the absence and the presence of the proposed optimal controller
3.2 Synchronization
In this section, we synchronize two identical hyperchaotic conduction systems in the frameworks of classical and fractional calculus by applying an adaptive and an active controller, respectively.
3.2.1 Integer-order case
Nonlinear nonautonomous biological systems are generally hard to synchronize due to the complexity of their hyperchaotic behaviors. Thus, we apply a systematic synchronization action plan to reach the synchronization purpose in this section. To this aim, we consider Eq. (2) as the master system, while the slave system is taken from
in which \(u_{i}\) and \(g_{i}\) are the control input and the state variable of the slave model, respectively. Assuming \(e_{i}(t)=g_{i}(t)-f_{i}(t)\) as the error of synchronization, we derive the error dynamical equations as
Theorem 3.1
The nonautonomous hyperchaotic conduction systems (2) and (24) can be globally and asymptotically synchronized by using the following adaptive control law:
together with the following parameter updating law:
in which the uncertain parameters \(\alpha _{1},\alpha _{2},\alpha _{3},\beta _{1},\beta _{2},\beta _{3}, \gamma _{1},\gamma _{2},\gamma _{3},r_{13},r_{15},r_{31},r_{35},r_{51},r_{53}\) are estimated by \(\hat{\alpha }_{1},\hat{\alpha }_{2},\hat{\alpha }_{3},\hat{\beta }_{1}, \hat{\beta }_{2},\hat{\beta }_{3},\hat{ \gamma }_{1},\hat{\gamma }_{2},\hat{\gamma }_{3},\hat{r}_{13},\hat{r}_{15}, \hat{r}_{31},\hat{r}_{35},\hat{r}_{51},\hat{r}_{53}\), respectively, and \(b_{i}\geq 0\) is a constant gain.
Proof
Substituting (25) into (24), we have
which can be rewritten as
in which
Also, the related derivatives are stated by
Then we suppose the following Lyapunov function and its derivative for the model stated in Eqs. (28) and (30):
respectively. Applying the parameter update law from Eq. (26), we get
If we consider \(b=\min \{b_{1},b_{2},b_{3},b_{4},b_{5},b_{6}\}\), then \(\dot{V}\leq -b \Vert e(t) \Vert _{2}^{2}\). Integrating both sides of this inequality, we have
Applying Barbalat’s lemma [37], considering the fact that \(\dot{e}(t)\in L_{\infty }\) and \(e(t)\in L_{2}\) (concluded from Eqs. (28) and (33)), and using the proposed control input (25), we can conclude that the considered hyperchaotic conduction systems (2) and (24) are synchronized asymptotically and globally, the fact which reveals that the error of synchronization converges to the origin in an asymptotic manner. □
To illustrate the effective performance of Theorem 3.1, we take into account the initial states and parameters as follows:
Additionally, the constant gains are set to be \(b_{1}=b_{2}=b_{3}=b_{4}=b_{5}=b_{6}=1\). The synchronized state trajectories as well as the synchronization errors are depicted in Figs. 7 and 8, respectively.


3.2.2 Fractional-order case
In this section, in order to synchronize two identical fractional-order cardiac conduction systems, we design an efficient active control strategy. To this aim, we consider the fractional-order model (10) as the master system and consider the slave one as follows:
where \(u_{i}\) and \(g_{i}\) are the control input and the state variable of the slave model, respectively. If we consider \(e_{i}(t)=g_{i}(t)-f_{i}(t)\) as the synchronization error, then the dynamic of \(e_{i}\) is formulated by
Assume the control input as
where \(r_{1},r_{2},r_{3},r_{4},r_{5},r_{6}\) are active control inputs. Substituting and rearranging (36) and (37), we derive the synchronization error dynamics in the form
Note that the active control inputs must be chosen such that the master and the slave systems are synchronized. Here, we suppose the following control inputs as an effective choice:
where
Notice that there are other possibilities to choose the constant matrix A. The main point which should be taken into account is that the matrix A should be selected such that the conditions of stability in Lemma 2.1 are achieved. By considering the parameter values \((\alpha _{1},\alpha _{2},\alpha _{3},\beta _{1},\beta _{2},\beta _{3}, \gamma _{1},\gamma _{2},\gamma _{3},r_{13},r_{15},r_{31},r_{35},r_{51},r_{53})\) as in Table 1, the initial values of the master and the slave systems as \(f(0)=(0.01,0.01,0.01,0.01,0.01,0.01)\) and \(g(0)=(-2,-4,-6,3,-4,1)\), respectively, we simulate the results including the synchronized state trajectories and synchronization errors for \(q_{i}=0.9\) in Figs. 9–10, respectively.


4 Discussions and concluding remarks
In this paper, the hyperchaotic behaviors of a nonautonomous cardiac conduction system were investigated in both frames of integer- and fractional-order differential equations. Considering both cases, we designed optimal control strategies to stabilize the hyperchaotic state variables and diminish the hyperchaotic behaviors efficiently. These controllers were designed by applying the PMP for the necessary optimality conditions. Afterwards, we synchronized two similar conduction systems using an adaptive control scheme and an active controller, respectively, for the integer- and fractional-order models. More specifically, assuming parameter uncertainty, we synchronized two identical integer-order systems; the asymptotic stability of the synchronization error was proved by using Barbalat’s lemma together with the stability theory of Lyapunov. Then considering the fractional-order mathematical model, we proposed an active controller to synchronize two identical fractional-order systems. As a result, the application of fractional calculus in this paper presented a more realistic and flexible performance to design well-organized control strategies for fractional-order models can describe memory effects which are the essential feature of many biological processes.
Availability of data and materials
Data sharing is not applicable to this article as no datasets were generated or analysed during the current study.
References
Ren, H.-P., Bai, C., Kong, Q., Baptista, M.S., Grebogi, C.: A chaotic spread spectrum system for underwater acoustic communication. Phys. A, Stat. Mech. Appl. 478, 77–92 (2017)
Corron, N.J., Hahs, D.W.: A new approach to communications using chaotic signals. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 44(5), 373–382 (1997)
Wang, H., Ye, J.-M., Miao, Z.-H., Jonckheere, E.A.: Robust finite-time chaos synchronization of time-delay chaotic systems and its application in secure communication. Trans. Inst. Meas. Control 40(4), 1177–1187 (2018)
Pal, M., Satish, B., Srinivas, K., Rao, P.M., Manimaran, P.: Multifractal detrended cross-correlation analysis of coding and non-coding dna sequences through chaos-game representation. Phys. A, Stat. Mech. Appl. 436, 596–603 (2015)
Hamel, S., Boulkroune, A.: A generalized function projective synchronization scheme for uncertain chaotic systems subject to input nonlinearities. Int. J. Gen. Syst. 45(6), 689–710 (2016)
Grassi, G., Mascolo, S.: Nonlinear observer design to synchronize hyperchaotic systems via a scalar signal. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 44(10), 1011–1014 (1997)
Rafikov, M., Balthazar, J.M.: On control and synchronization in chaotic and hyperchaotic systems via linear feedback control. Commun. Nonlinear Sci. Numer. Simul. 13(7), 1246–1255 (2008)
Al-Azzawi, S.F., Aziz, M.M.: Chaos synchronization of nonlinear dynamical systems via a novel analytical approach. Alex. Eng. J. 57(4), 3493–3500 (2018)
Chen, Z., Yuan, X., Yuan, Y., Iu, H.H.-C., Fernando, T.: Parameter identification of chaotic and hyper-chaotic systems using synchronization-based parameter observer. IEEE Trans. Circuits Syst. I, Regul. Pap. 63(9), 1464–1475 (2016)
Batmani, Y.: Chaos control and chaos synchronization using the state-dependent Riccati equation techniques. Trans. Inst. Meas. Control 41(2), 311–320 (2019)
Othman, A.A., Noorani, M., Al-Sawalha, M.M.: Adaptive dual synchronization of chaotic and hyperchaotic systems with fully uncertain parameters. Optik 127(19), 7852–7864 (2016)
Azar, A.T., Serranot, F.E., Vaidyanathan, S.: Sliding mode stabilization and synchronization of fractional order complex chaotic and hyperchaotic systems. In: Mathematical Techniques of Fractional Order Systems, pp. 283–317. Elsevier, Amsterdam (2018)
Dongmo, E.D., Ojo, K.S., Woafo, P., Njah, A.N.: Difference synchronization of identical and nonidentical chaotic and hyperchaotic systems of different orders using active backstepping design. J. Comput. Nonlinear Dyn. 13(5), 051005 (2018)
Skinner, J.E.: Low-dimensional chaos in biological systems. Nat. Biotechnol. 12(6), 596–600 (1994)
Vaidyanathan, S.: Global chaos synchronization of the Lotka–Volterra biological systems with four competitive species via active control. Int. J. PharmTech Res. 8(6), 206–217 (2015)
Agarwal, P., Denz, S., Jain, S., Alderremy, A.A., Aly, S.: A new analysis of a partial differential equation arising in biology and population genetics via semi analytical techniques. Phys. A, Stat. Mech. Appl. 542, 122769 (2020)
Sabarathinam, S., Thamilmaran, K.: Controlling of chaos in a tumour growth cancer model: an experimental study. Electron. Lett. 54(20), 1160–1162 (2018)
El-Gohary, A.: Chaos and optimal control of equilibrium states of tumor system with drug. Chaos Solitons Fractals 41(1), 425–435 (2009)
Vaidyanathan, S.: Active control design for the hybrid chaos synchronization of Lotka–Volterra biological systems with four competitive species. Int. J. PharmTech Res. 8(8), 30–42 (2015)
Jajarmi, A., Baleanu, D., Sajjadi, S.S., Asad, J.H.: A new feature of the fractional Euler–Lagrange equations for a coupled oscillator using a nonsingular operator approach. Front. Phys. 7, 196 (2019)
Rezapour, S., Mohammadi, H., Jajarmi, A.: A new mathematical model for Zika virus transmission. Adv. Differ. Equ. 2020, 589 (2020)
Baleanu, D., Jajarmi, A., Sajjadi, S.S., Asad, J.H.: The fractional features of a harmonic oscillator with position-dependent mass. Commun. Theor. Phys. 72(5), 055002 (2020)
Asad, J.H., Baleanu, D., Ghanbari, B., Jajarmi, A., Pirouz, H.M.: Planar system-masses in an equilateral triangle: numerical study within fractional calculus. Comput. Model. Eng. Sci. 124(3), 953–968 (2020)
Jajarmi, A., Baleanu, D.: A new iterative method for the numerical solution of high-order nonlinear fractional boundary value problems. Front. Phys. 8, 220 (2020)
Baleanu, D., Jajarmi, A., Mohammadi, H., Rezapour, S.: A new study on the mathematical modelling of human liver with Caputo–Fabrizio fractional derivative. Chaos Solitons Fractals 134, 109705 (2020)
Agarwal, P., Choi, J.: Fractional calculus operators and their image formulas. J. Korean Math. Soc. 53(5), 1183–1210 (2016)
Rekhviashvili, S.S., Pskhu, A., Agarwal, P., Jain, S.: Application of the fractional oscillator model to describe damped vibrations. Turk. J. Phys. 43(4), 236–242 (2019)
El-Sayed, A.A., Agarwal, P.: Numerical solution of multiterm variable-order fractional differential equations via shifted Legendre polynomials. Math. Methods Appl. Sci. 42(11), 3978–3991 (2019)
Alderremy, A.A., Saad, K.M., Agarwal, P., Aly, S., Jain, S.: Certain new models of the multi space-fractional Gardner equation. Phys. A, Stat. Mech. Appl. 545, 123806 (2020)
Baltaeva, U., Agarwal, P.: Boundary-value problems for the third-order loaded equation with noncharacteristic type-change boundaries. Math. Methods Appl. Sci. 41(9), 3307–3315 (2018)
Wu, G.-C., Baleanu, D., Xie, H.-P., Chen, F.-L.: Chaos synchronization of fractional chaotic maps based on the stability condition. Phys. A, Stat. Mech. Appl. 460, 374–383 (2016)
Boubellouta, A., Zouari, F., Boulkroune, A.: Intelligent fuzzy controller for chaos synchronization of uncertain fractional-order chaotic systems with input nonlinearities. Int. J. Gen. Syst. 48(3), 211–234 (2019)
Al-Khedhairi, A., Matouk, A., Askar, S.: Computations of synchronisation conditions in some fractional-order chaotic and hyperchaotic systems. Pramana 92(5), 72 (2019)
Sajjadi, S.S., Baleanu, D., Jajarmi, A., Pirouz, H.M.: A new adaptive synchronization and hyperchaos control of a biological snap oscillator. Chaos Solitons Fractals 138, 109919 (2020)
Nazari, S., Heydari, A., Khaligh, J.: Modified modeling of the heart by applying nonlinear oscillators and designing proper control signal. Appl. Math. 4(7), 972–978 (2013)
Van Der Pol, B., Van Der Mark, J.: Lxxii. The heartbeat considered as a relaxation oscillation, and an electrical model of the heart. London, Edinburgh, Dublin Philos. Mag. J. Sci. 6(38), 763–775 (1928)
Mainardi, F.: Fractional relaxation-oscillation and fractional diffusion-wave phenomena. Chaos Solitons Fractals 7(9), 1461–1477 (1996)
Caputo, M.: Linear models of dissipation whose q is almost frequency independent. Ann. Geophys. 19(4), 383–393 (1966)
Baleanu, D., Jajarmi, A., Sajjadi, S.S., Mozyrska, D.: A new fractional model and optimal control of a tumor-immune surveillance with non-singular derivative operator. Chaos, Interdiscip. J. Nonlinear Sci. 29(8), 083127 (2019)
Diethelm, K., Freed, A.D.: The fracpece subroutine for the numerical solution of differential equations of fractional order. Forsch. Wissenschaft. Rech. 1999, 57–71 (1998)
Matouk, A.E.: Stability conditions, hyperchaos and control in a novel fractional order hyperchaotic system. Phys. Lett. 373(25), 2166–2173 (2009)
Kirk, D.E.: Optimal Control Theory: An Introduction. Courier Corporation (2004)
Shojaei, K., Chatraei, A.: A saturating extension of an output feedback controller for internally damped Euler–Lagrange systems. Asian J. Control 17(6), 2175–2187 (2015)
Jajarmi, A., Hajipour, M.: An efficient recursive shooting method for the optimal control of time-varying systems with state time-delay. Appl. Math. Model. 40(4), 2756–2769 (2016)
Jajarmi, A., Pariz, N., Effati, S., Vahidian Kamyad, A.: Infinite horizon optimal control for nonlinear interconnected large-scale dynamical systems with an application to optimal attitude control. Asian J. Control 14(5), 1239–1250 (2012)
Effati, S., Saberi Nik, H., Jajarmi, A.: Hyperchaos control of the hyperchaotic Chen system by optimal control design. Nonlinear Dyn. 73(1–2), 499–508 (2013)
Jajarmi, A., Baleanu, D.: On the fractional optimal control problems with a general derivative operator. Asian J. Control 23(2), 1062–1071 (2021)
Jajarmi, A., Yusuf, A., Baleanu, D., Inc, M.: A new fractional HRSV model and its optimal control: a non-singular operator approach. Phys. A, Stat. Mech. Appl. 547, 123860 (2020)
Yıldız, T.A., Jajarmi, A., Yıldız, B., Baleanu, D.: New aspects of time fractional optimal control problems within operators with nonsingular kernel. Discrete Contin. Dyn. Syst., Ser. S 13(3), 407–428 (2020)
Acknowledgements
Not applicable.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
The authors declare that the study was realized in collaboration with equal responsibility. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Baleanu, D., Sajjadi, S.S., Asad, J.H. et al. Hyperchaotic behaviors, optimal control, and synchronization of a nonautonomous cardiac conduction system. Adv Differ Equ 2021, 157 (2021). https://doi.org/10.1186/s13662-021-03320-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-021-03320-0