
Abstract
The fractional Hopfield neural network (HNN) model is studied here analyzing its symmetry, uniqueness of the solution, dissipativity, fixed points etc. A Lyapunov and bifurcation analysis of the system is done for specific as well as variable fractional order. Since a very long time ago, HNN has been carefully studied and applied in various fields. Because of the exceptional non-linearity of the neuron activation function, the HNN system is stoutly non-linear. Chaos control using adaptive SMC considering disturbances and uncertainties is done about randomly chosen points by designing suitable controllers. Numerical simulations performed in MATLAB verify the efficacy of the designed controllers.
Similar content being viewed by others

1 Introduction
Various mathematical models have been proposed to understand the various phenomena better. Proposing biological models [1] has become most important as it helps scientists in better understanding and bringing new insight into it, such as epidemic modeling that may help in control of the epidemic. Most of the biological models [2, 3] that have been proposed fall in the category of non-linear biological systems. Chaos, antimonotonicity, different types of bifurcations, multi-stability are the many properties [4] which have been visualized in many biological models. In order to analyze the proposed non-linear dynamical models [5–8], one should use non-linear methods such as Lyapunov exponents, stagnation points analysis, basins of attraction, and bifurcation diagrams. In order to model the changing dynamics, the considered parameter values can be changed over a wide range.
Since a very long time ago, the Hopfield neural network (HNN) has been carefully studied and applied in various fields such as in image encryption, data storage, information processing, and associative memory. Because of the exceptional non-linearity of the neuron activation function, the HNN model is stoutly non-linear [9]. Like the chaotic time delay systems, Chua circuit, and coupled HR neuron circuits [10], the HNN model generates very complex behaviors like hyper-chaos, periodic chaos and quasi-period [11], which implies that the HNN model simulates the prominent chaotic behavior like that of the brain [12, 13]. Therefore, one must investigate these systems as they have a theoretical significance as well as practical significance. Up to now various HNN models have been studied and proposed in the literature; such as the two dimensional neuronal model [14], three dimensional neuronal model [15] and four dimensional neuronal model [16]. For these systems a variety of studies has been done, such as multi-stability, coexisting attractors, circuit implementation, and synchronization [17–23].
Many chaos control methods [24–27] have been developed in the recent past to tame chaos and increase its application across various disciplines. Some of the popular methods used are active control, tracking control, sliding mode, and the parameter estimation method. Chaos synchronization is also a way to contain chaos between master and slave systems. Some popular synchronization methods use the anti-synchronization, projective synchronization, difference synchronization, and matrix synchronization [28] methods [29–32].
We study fractional [33, 34] HNN model varying parameter values and fractional orders. Some basic dynamic methods [35–37] have been used such as Lyapunov exponents [38, 39], bifurcation diagrams [40], phase portraits, and time series. We have also discussed the existence of the solution of the considered system. As the considered system did not have any stagnation point, we have used chaos control using adaptive sliding mode about two arbitrarily chosen desired points considering external disturbances and uncertainties. The disturbances have been estimated and the error converging to zero has been achieved, which have been plotted using MATLAB software.
2 The fractional Hopfield neural network
The fractional HNN model is [41]:
For \(P=0.8\) and I.C. \((0,0.01,0)\), system (1) shows chaotic behavior. Here we introduce the fractional version of HNN, perform its thorough dynamical analysis and chaos control. Caputo’s derivative is used in the paper:
The fractional HNN model is given as
where \(Z=(Z_{1},Z_{2},Z_{3})^{T}\in{R}^{3}\) are the state variables and \(P\in R\) is a parameter value.
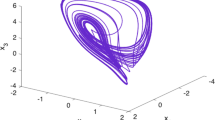
For \(P=0.8\) and initial condition (I.C.) \((0,0.01,0)\) the fractional system is chaotic for \(q=0.987\) as is seen in Fig. 1 and Fig. 2.

State trajectories of (2)

Chaotic attractors of (2)
3 Dynamics of fractional HNN model
The dynamics of the fractional HNN with tanhyperbolic terms is explored here, studying the symmetry, dissipative, uniqueness of the solution, bifurcation and Lyapunov dynamics, fixed point analysis, etc.
3.1 Symmetry, stagnation point analysis and dissipativity
System (2) in matrix form can be written as
where
The fractional HNN model (2) does not remain invariant under the \(Z_{i} \rightarrow-Z_{i}\), \(Z_{j} \rightarrow-Z_{j}\), \(Z_{k} \rightarrow Z_{k}\) transformation i.e. the system possesses asymmetric behavior about all the axes. However, the system is symmetric about the origin as under the transformation \(Z_{1} \rightarrow-Z_{1}\), \(Z_{2} \rightarrow-Z_{2}\), \(Z_{3} \rightarrow-Z_{3}\), the system remains invariant.
The divergence of G is
i.e.
Therefore (2) is dissipative.
Equating \(G_{i}(Z_{1},Z_{2},Z_{3})\) for \(i=1,2,3\) to 0, the system can be explored for stagnation points i.e.
For \(P=0.8\) we obtain no stagnation points. The absence of stagnation points hints at the complex nature of the chaotic system.
3.2 Solution of HNN model
Theorem
The I.V.P. of system (2)
where
\(q=(q_{1},q_{2},q_{3})^{T}\), \(0< q_{i}<1\) for \(i=1, 2, 3\) for some constant \(\tau>0\), then a unique solution exists.
Proof
Let \(G(Z)=B_{1}Z(t)+B_{2}\tanh(Z(t))\), then \(G(Z)\) is continuous and bounded on \([Z_{0}-\epsilon,Z_{0}+\epsilon]\) for any \(\epsilon>0\), therefore Lipschitz continuity over \([Z_{0}-\epsilon,Z_{0}+\epsilon]\) proves the existence and uniqueness of the solution.
We have
We have
Thus
where \(D=(\|B_{1}\|+2\|B_{2}\|)[2|Z_{o}|+2 \epsilon]))\) and \(W(t) \in R^{3}\).
Hence system (2) possesses a unique solution. □
3.3 Lyapunov dynamics and bifurcation
For \(P=0.8\) and I.C. \((0,0.01,0)\) the Lyapunov spectrum of the system for \(q=0.987\) is
The positive component confirms the presence of chaos. The L.E. shows the separation rate of trajectories starting closely. The Lyapunov values help to find the chaotic dimension of the chaotic attractor, called the Kaplan–Yorke dimension.
From the formula
where p is such that \(\sum_{s=1}^{p}L.E._{s} \geq0\) and \(\sum_{s=1}^{p+1}L.E._{s} <0 \), we get the chaotic attractor’s dimension. Hence the K.Y. dimension is 2.27576.
Chaotic systems are highly sensitive to parameter values and I.C. By varying the parameter values and I.C. the nature of the dynamical system may vary from regular, periodic to chaotic nature. Bifurcations give the nature of chaotic system by changing parameters in a range. The bifurcations determine the route to chaos. For the HNN model by varying the parameter in the range \((0.5, 1)\) the bifurcations can be seen in Fig. 3. Figure 4 shows Lyapunov and bifurcations for varying q between 0.8 to 1. The phase portrait of the system for varying q is also shown in Fig. 5.

Bifurcation diagram for \(P\in(0.5,1)\)

System dynamics for \(0.8 \leq q \leq1\)

Chaotic attractors for (2) at q= (a) 0.95, (b) 0.98, (c) 0.99, (d) 1
4 Controlling chaos
Chaos in fractional HNN model exposed to uncertainties and disturbances is controlled using an adaptive SMC technique. Suitably designed controllers are constructed to stabilize chaos in the trajectories of the system about an arbitrarily chosen point \((p_{1},p_{2},p_{3})\). The fractional HNN model exposed to uncertainties and external disturbances is
where \(\bigtriangleup H_{i} \) are uncertainties and \(D_{i}\) are disturbances, \({v_{i}}\) are controllers designed about desired point. Figures 6 and 7 give the trajectories and plots of the exposed system. Consider \(|\bigtriangleup H_{i}| \) and \(D_{i} \) to be bounded by positive values \(C_{i} \) and \(F_{i}\) with \(\hat{C_{i}}\), \(\hat{F_{i}}\) being their estimates.

Trajectories of exposed system (3)

Chaotic attractors of exposed system (3)
Define the control error about the desired point \((p_{1},p_{2},p_{3})\) as
Differentiating (4) we get
The sliding surface is defined as
To have (5) in sliding mode, the necessary condition is
Differentiating (6):
Then from (7), we have
Equation (9) is stable using Matignon’s theorem [42]. The designed controllers are
with \(\operatorname{sign}(\cdot) \), the signum function.
Parameter update conditions are
with \(c_{i}, f_{i} > 0\) are constants.
Theorem 4.1
Trajectories of fractional HNN model exposed to uncertainties and disturbances achieve stability about any desired point \((p_{1},p_{2},p_{3})\) using (10)–(11).
Proof
The proof is based on Lyapunov’s direct method, defining [43] the Lyapunov function by
where
Differentiating (13):
From (8), we have
Substituting \(D^{q}e_{i}\), \(\dot{\hat{C}}_{i} \) and \(\dot{\hat{F}}_{i} \) in (15):
Finally,
Thus ∃ a real T ≥0 so that
then
From Lyapunov stability theory \(\Vert s_{i}\Vert \rightarrow0 \) as \(t\rightarrow\infty\). Hence the errors converge to \(s_{i}=0 \) implying stability about the desired point. □
4.1 Simulations
For performing simulations, the following assumptions have been made: \(P=0.8\) for \(q=0.987\) and I.C. as \((0,0.01,0)\), \(\bigtriangleup H_{1}=\sin(Z_{1})\), \(D_{1}=0\), \(\bigtriangleup H_{2}=0\), \(D_{2}=\sin(7t)\), \(\bigtriangleup H_{3}=0\), \(D_{3}=\cos (7t)\). Here \(v_{1}\), \(v_{2}\), \(v_{3}\) are controllers about any point \((p_{1},p_{2},p_{3})\), \(\lambda_{1}=1\), \(\lambda_{2}=2\), \(\lambda_{3}=3\), \(r_{1}=1\), \(r_{2}=2\), \(r_{3}=3\). Figure 8 gives the controlled trajectories, errors, surface with estimated disturbances about \((1,2,3)\) and Fig. 9 gives results about \((-1,-2,-3)\).

Controlling chaos about \((1,2,3)\) (b) with error, surface and estimated disturbances

Controlling chaos about \((-1,-2,-3)\) (b) with error, surface and estimated disturbances
5 Conclusion
Dynamical properties of fractional order HNN model are studied in the paper by analyzing the system’s symmetry, uniqueness of the solution, dissipativity and fixed points. Lyapunov dynamics and bifurcations of the system are studied for specific order as well as variable order. The chaos in a fractional system exposed to uncertainties and disturbances is contained by designing suitable controllers based on an adaptive sliding mode control technique about two arbitrarily chosen desired points. The simulations performed in Matlab have been displayed and discussed.
Synchronization of the fractional HNN model with some other system involves future scope of work in this direction. Also studying the system as regards its hidden attractors as well as its electronic circuit would be interesting.
Availability of data and materials
Not applicable.
References
Baleanu, D., Jajarmi, A., Mohammadi, H., Rezapour, S.: A new study on the mathematical modelling of human liver with Caputo–Fabrizio fractional derivative. Chaos Solitons Fractals 134, 109705 (2020)
Inan, B., Osman, M.S., Ak, T., Baleanu, D.: Analytical and Numerical Solutions of Mathematical Biology Models: The Newell–Whitehead–Segel and Allen–Cahn Equations, Mathematical Methods in the Applied Sciences. Wiley, New York (2019)
Javidi, M., Nyamoradi, N.: Dynamic analysis of a fractional order prey–predator interaction with harvesting. Appl. Math. Model. 37(20–21), 8946–28956 (2013)
Khan, A., Lone, S.J., Trikha, P.: Analysis of a novel 3-D fractional order chaotic system. In: ICPECA, pp. 1–6. IEEE Comput. Soc., Los Alamitos (2019)
Sundarapandian, V., Pehlivan, I.: Analysis, control, synchronization, and circuit design of a novel chaotic system. Math. Comput. Model. 55(7–8), 1904–1915 (2012)
Vaidyanathan, S.: Analysis, control and synchronisation of a six-term novel chaotic system with three quadratic nonlinearities. Int. J. Model. Identif. Control 22(1), 41–53 (2014)
Vaidyanathan, S., Rajagopal, K., Volos, C.K., Kyprianidis, I.M., Stouboulos, I.N.: Analysis, adaptive control and synchronization of a seven-term novel 3-D chaotic system with three quadratic nonlinearities and its digital implementation in LabVIEW. J. Eng. Sci. Technol. Rev. 8(2), 130–141 (2015)
Vaidyanathan, S., Volos, C.K., Pham, V.T.: Analysis, adaptive control and adaptive synchronization of a nine-term novel 3-D chaotic system with four quadratic nonlinearities and its circuit simulation. J. Eng. Sci. Technol. Rev. 8(2), 181–191 (2015)
Hopfield, J.J.: Neurons with graded response have collective computational properties like those of 2-state neurons. Proc. Natl. Acad. Sci. USA 81(10), 3088–3092 (1984)
Ren, G.D., Xu, Y., Wang, C.N.: Synchronization behavior of coupled neuron circuits composed of memristors. Nonlinear Dyn. 88(2), 893–901 (2017)
Zheng, P.S., Tang, W.S., Zhang, J.X.: Some novel double-scroll chaotic attractors in Hopfield networks. Neurocomputing 73, 2280–2285 (2010)
Babloyantz, A., Lourenco, C.: Brain chaos and computation. Int. J. Neural Syst. 7(4), 461–471 (1996)
Korn, H., Faure, P.: Is there chaos in the brain? II. Experimental evidence and related models. C. R. Biol. 326(9), 787–840 (2003)
Xu, Q., Song, Z., Bao, H., Chen, M., Bao, B.: Two-neuron-based non autonomous memristive Hopfield neural network: numerical analyses and hardware experiments. AEÜ, Int. J. Electron. Commun. 96, 66–74 (2018)
Danca, M.F., Kuznets, L.: Hidden chaotic sets in a Hopfield neuralsystem. Chaos Solitons Fractals 103, 144–150 (2017)
Njitacke, Z.T., Kengne, J., Fotsin, H.B.: A plethora of behaviors in a memristor based HNNs. Int. J. Dyn. Control. https://doi.org/10.1007/s40435-018-0435-x/
Khan, A., Trikha, P.: Study of Earth’s changing polarity using compound difference synchronization. GEM Int. J. Geomath. 11(1), 7 (2020)
Khan, A., Trikha, P.: Compound difference anti-synchronization between chaotic systems of integer and fractional order. SN Appl. Sci. 1, 757 (2019). https://doi.org/10.1007/s42452-019-0776-x
Khan, A., Jahanzaib, L.S., Trikha, P.: Fractional inverse matrix projective combination synchronization with application in secure communication. In: Proceedings of International Conference on Artificial Intelligence and Applications, pp. 93–101. Springer, Berlin (2021)
Trikha, P., Jahanzaib, L.S.: Secure communication: using double compound-combination hybrid synchronization. In: Proceedings of International Conference on Artificial Intelligence and Applications, pp. 81–91. Springer, Berlin (2021)
Khan, A., Trikha, P., Jahanzaib, L.S.: Dislocated hybrid synchronization via. Tracking control & parameter estimation methods with application. In: International Journal of Modelling and Simulation, vol. 1. Taylor & Francis, London (2020)
Khan, A., Jahanzaib, L.S., Trikha, P.: Secure communication: using parallel synchronization technique on novel fractional order chaotic system. In: IFAC-PapersOnLine, vol. 53, pp. 307–312. Elsevier, Amsterdam (2020)
Khan, A., Trikha, P., Lone, S.J.: Secure communication: using synchronization on a novel fractional order chaotic system. In: ICPECA, pp. 1–5. IEEE Comput. Soc., Los Alamitos (2019)
Mahmoud, E.E., Trikha, P., Jahanzaib, L.S., Almaghrabi, O.A.: Dynamical analysis and chaos control of the fractional chaotic ecological model. Chaos Solitons Fractals 141, 110348 (2020)
Shabbir, M.S., Din, Q., Ahmad, K., Tassaddiq, A., Soori, A.H., Khan, M.A.: Stability, bifurcation, and chaos control of a novel discrete-time model involving Allee effect and cannibalism. Adv. Differ. Equ. 2020(1), 379 (2020)
Akinlar, M.A., Tchier, F., Inc, M.: Chaos control and solutions of fractional-order Malkus waterwheel model. Chaos Solitons Fractals 135, 109746 (2020)
Singh, A., Deolia, P.: Dynamical analysis and chaos control in discrete-time prey-predator model. Commun. Nonlinear Sci. Numer. Simul. 90, 105313 (2020)
Khan, A., Jahanzaib, L.S., Khan, T., Trikha, P.: Secure communication: using fractional matrix projective combination synchronization. AIP Conf. Proc. 2253(1), 020009 (2020)
Jian, L., Shutang, L.: Complex modified function projective synchronization of complex chaotic systems with known and unknown complex parameters. Appl. Math. Model. 48, 440–450 (2017)
Jian, L., Shutang, L., Sprott, J.C.: Adaptive complex modified hybrid function projective synchronization of different dimensional complex chaos with uncertain complex parameters. Nonlinear Dyn. 83(1), 1109–1121 (2016)
Khan, A., Jahanzaib, L.S., Trikha, P.: Changing dynamics of the first, second and third approximations of the exponential chaotic system and their application in secure communication using synchronization. Int. J. Appl. Comput. Math. 7(1), 1–26 (2020)
Jahanzaib, L.S., Trikha, P., Baleanu, D.: Analysis and application using quad compound combination anti-synchronization on novel fractional-order chaotic system. Arab. J. Sci. Eng. 46, 1729–1742 (2021)
Baleanu, D., Jajarmi, A., Sajjadi, S.S., Asad, J.H.: The fractional features of a harmonic oscillator with position-dependent mass. In: Communications in Theoretical Physics, vol. 72. IOP Publishing, Bristol (2020)
Baleanu, D., Etemad, S., Rezapour, S.: A hybrid Caputo fractional modeling for thermostat with hybrid boundary value conditions. Bound. Value Probl. 2020(1), 1 (2020)
Zhang, S., Zeng, Y.: A simple Jerk-like system without equilibrium: asymmetric coexisting hidden attractors, bursting oscillation and double full Feigenbaum remerging trees. Chaos Solitons Fractals 120, 25–40 (2019)
Mahmoud, E.E., Jahanzaib, L.S., Trikha, P., Alkinani, M.H.: Anti-synchronized quad-compound combination among parallel systems of fractional chaotic system with application. Alex. Eng. J. 59(6), 4183–4200 (2020)
Trikha, P., Jahanzaib, L.S.: Dynamical analysis of a novel 5-d hyper-chaotic system with no equilibrium point and its application in secure communication. Differ. Geom.-Dyn. Syst. 22, 269–288 (2020)
Geist, K., Parlitz, U., Lauterborn, W.: Comparison of different methods for computing Lyapunov exponents. Prog. Theor. Phys. 83(5), 875–893 (1990)
Wolf, A., Swift, J.B., Swinney, H.L., Vastano, J.A.: Determining Lyapunov exponents from a time series. Phys. D: Nonlinear Phenom. 16(3), 285–317 (1985)
Broucke, M.: One parameter bifurcation diagram for Chua’s circuit. IEEE Trans. Circuits Syst. 34(2), 208–209 (1987)
Bao, B., Qian, H., Wang, J., Xu, Q., Chen, M., Wu, H., Yu, Y.: Numerical analyses and experimental validations of coexisting multiple attractors in Hopfield neural network. In: Nonlinear Dynamics, vol. 90, pp. 2359–2369. Springer, Berlin (2017)
Matignon, D.: Stability results for fractional differential equations with applications to control processing. In: Computational Engineering in Systems Applications, vol. 2, pp. 963–968. IMACS, IEEE-SMC Lille, France (1996)
Vidyasagar, M.: Nonlinear Systems Analysis, vol. 42. SIAM, Philadelphia (2002)
Diethelm, K., Ford, N.J.: Analysis of fractional differential equations. J. Math. Anal. Appl. 265, 229–248 (2002)
Acknowledgements
Taif University Researchers Supporting Project number (TURSP-2020/20), Taif University, Taif, Saudi Arabia.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
The authors contributed equally and significantly in writing this paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mahmoud, E.E., Jahanzaib, L.S., Trikha, P. et al. Analysis and control of the fractional chaotic Hopfield neural network. Adv Differ Equ 2021, 126 (2021). https://doi.org/10.1186/s13662-021-03285-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-021-03285-0