
Abstract
A \((2+1)\)-dimensional nonlinear Schrödinger equation is mainly discussed. Based on the Hirota direct method and the Wronskian technique, multiple-soliton solutions and a generalized double Wronskian determinant are obtained, respectively.
Similar content being viewed by others


1 Introduction
As one of the most important integrable nonlinear equations, the nonlinear Schrödinger (NLS) equation
is a well-known mathematical model for describing the evolution of pulses in nonlinear optical fibers and of surface gravity waves in fluid dynamics [1]. To investigate different complex nonlinear phenomena of our realistic world, some generalizations of the widely used \((1+1)\)-dimensional Eq. (1) into a \((2+1)\)-dimensional one are obtained [2–4]. Theoretical and experimental research of these higher-dimensional integrable generalizations has been carried out due to their attraction and application in many fields such as plasma physics, nonlinear optics, fluid dynamics, and Bose-Einstein condensates [5–8]. The NLS equation admits the following \((2+1)\)-dimensional extension:
where \(u=u(x,y,t)\) is a complex function, \(Q=Q(x,y,t)\) is a real function, and \(x, y, t\) are real. For system (2), Ruan and Chen [9] have discussed its Painlevé properties and presented infinitely many truncated symmetries in terms of arbitrary functions of time t and variable y. Zhang [10] has revealed the rich dromion structures of system (2) based on the Hirota bilinear form.
One of vital aspects of soliton theory is searching exact solutions to soliton equations. Generally speaking, the Hirota bilinear method and the Wronskian technique are efficient and direct methods to construct exact solutions [11–14]. Recently, Chen et al. [15] extended the traditional condition equation to the arbitrary matrix equation and established the rational solutions and complexitons in terms of double Wronskian forms for the AKNS system. At present, general rational soliton solutions to various soliton equations are also discussed within the Casoratian structure and the Grammian or Pfaffian formulation [16–18].
In this paper, using the Hirota bilinear method and Chen’s method, we discuss multiple-soliton solutions and a generalized double Wronskian determinant solution to system (2), respectively. The paper is organized as follows. In Section 2, by a dependent variable transformation, system (2) is transformed into a bilinear equation. Utilizing the perturbation method, we derive soliton solutions of system (2) based on the Hirota bilinear form. In Section 3, we present a double Wronskian form of system (2) whose entries satisfy a general matrix equation. A conclusion and remarks are given in Section 4.
2 Multi-soliton solutions
Via the dependent variable transformations [10]
where \(g=g(x,y,t)\) is a differentiable complex function, and \(f=f(x,y,t)\) is a differentiable real function, the bilinear form for system (2) is as follows:
where \(D_{x},D_{y}\), and \(D_{t}\) are the Hirota bilinear differential operators [19].
We expand f and g in the form of a power series as
Substituting (5a)-(5b) into Eqs. (4a)-(4c) and collecting terms of each order of ε, we get
2.1 One-soliton solution
It is obvious that Eqs. (6a)-(6f) possess a particular solution
where
If we take \(\varepsilon=1\), then it is easy to see that \(g_{1}=e^{\xi_{1}}, f_{1}=1+e^{\xi_{1}+\xi_{1}^{*}+\theta_{13}} \) is a solution of Eqs. (4a)-(4c). Thus, through transformations (3), we can obtain the one-soliton solution of system (2) as
A specific one-soliton solution with choices of the involved parameters is plotted in Figure 1.

The plots of expression ( 8 ) with special parameters: \(\pmb{k_{1}=1,p_{1}=2,t=1}\) .
2.2 Two-soliton solution
If we choose the solution to Eq. (6a) in the form
then substituting (9) into Eq. (6e), we get
Substituting (9) and (10) into Eq. (6b), we have
With the help of (9)-(11), solving Eq. (6f), we can obtain
By similar steps as before a direct calculation yields
Taking \(\varepsilon=1\), then we have
Hence, the two-soliton solution of system (2) is
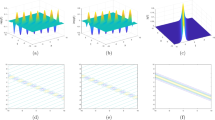
Figure 2 shows the plots of the two-soliton solution by choosing specific parameters.

The plots of expression ( 15 ) with special parameters: \(\pmb{k_{1}=-1,k_{2}=3,p_{1}=2, p_{2}=4,y=1}\) .
We now consider the asymptotic analysis on the two-soliton solution of (2). Let us define the soliton wave variables as
and
where \(k_{1R}, k_{1I},k_{2R}, k_{2I}, p_{1R}, p_{1I}, p_{2R}\), and \(p_{2I}\) all are real parameters.
Before collision (limit \(t \to-\infty\)):
(1) Soliton 1 \((\xi_{1}+\xi_{1}^{*}\sim0, \xi_{2}+\xi_{2}^{*}\to-\infty)\):
(2) Soliton 2 \((\xi_{2}+\xi_{2}^{*}\sim0, \xi_{1}+\xi_{1}^{*}\to+\infty)\):
After collision (limit \(t \to+\infty\)):
(1) Soliton 1 \((\xi_{1}+\xi_{1}^{*}\sim0, \xi_{2}+\xi_{2}^{*}\to+\infty)\):
(2) Soliton 2 \((\xi_{2}+\xi_{2}^{*}\sim0, \xi_{1}+\xi_{1}^{*}\to -\infty)\):
From these expressions it is easy to observe that the amplitude of the colliding solitons in the u change from \(\frac{1}{2}e^{-\frac{\theta_{13}}{2}}\) and \(\frac{1}{2}e^{-\frac{\theta_{12}+\theta_{23}-\theta_{14}-\theta _{24}-\theta_{34}}{2}}\) to \(\frac{1}{2}e^{-\frac{\theta_{12}+\theta_{14}-\theta_{13}-\theta _{23}-\theta_{34}}{2}}\) and \(\frac{1}{2}e^{-\frac{\theta_{24}}{2}}\) due to collision, respectively. In addition to this change in the amplitudes, the phase shift is given by
2.3 N-soliton solution
In general, the N-solition solution of system (2) can be expressed as
with
where
and \(A_{1}(u)\) and \(A_{2}(u)\) take all possible combinations of \(\mu_{j}=0,1\ (j=1,2,\dots,n)\) and satisfy the following conditions:
Thus, we can obtain the N-soliton solution of system (2) via the above results.
3 Generalized double Wronskian solution
In what follows, we derive the generalized double Wronskian determinant solution of system (2) by applying the Wronskian technique. To use this technique, we adopt the compact notation introduced by Freeman and Nimmo [20, 21], who set
where \(\phi=(\phi_{1},\phi_{2},\dots,\phi_{N+M})^{T}\), \(\psi=(\psi_{1},\psi_{2},\dots,\psi_{N+M})^{T}\), and \(\partial_{x}^{(j)}\) denotes the jth partial derivative with respect to x.
Theorem 3.1
The bilinear system (4a)-(4c) possesses the following generalized double Wronskian solution:
where the entries \(\phi_{j}\) and \(\psi_{j}\) \((j=1,2,\dots,N+1)\) satisfy the following conditions:
with \(A=(a_{ij})\) is an \((N+1)\times(N+1)\) arbitrary real matrix independent of \(x,y,t\).
For convenience of proof, we first give the following lemma.
Lemma 3.1
where M is an \(N\times(N-2)\) matrix, and a, b, c, d represent N column vectors.
Lemma 3.1 has been proved by Chen et al. [15].
Proof of Theorem 3.1
The derivatives of f can be easily computed:
Noting that
from condition (26a) we have
Under condition (26d), we also have
Substituting f, g,\(g^{*}\) and the derivatives of f into the left-hand side of (4c) and using (28a)-(28b), we get
By Lemma 3.1 the right-hand side of (29) is equal to zero. So the proof of (4c) is finished.
Using the identities, which are similar to (28a)-(28b),
namely,
we compute the left-hand side of (4a):
By Lemma 3.1 the right-hand side of (31) is equal to zero. Similarly, the bilinear form (4b) can be verified.
Based on conditions (26a)-(26d), we get the general solution
where \(C=(c_{1},c_{2},\dots,c_{N+1})^{T}\), \(D=(d_{1},d_{2},\dots,d_{N+1})^{T}\) are constant vectors. Thus, with transformations (3), the corresponding double Wronskian solutions of system (2) can be expressed as
If the coefficient matrix A has the form
then we can obtain solitons of system (2), where
□
4 Conclusion and remarks
In summary, by using the Hirota method and the Wronskian technique, the multiple-soliton solutions and the double Wronskian form satisfying a matrix equation to system (2) have been presented, respectively. As is well known, the Wronskian technique can also be applied to construct rational solutions, positons, negatons, complexitons, and interaction solutions of the nonlinear equations. We also point out that the N-soliton solutions of system (2) may be expressed by the Grammian determinants. Therefore, there is a lot of work to be done in these directions, and it should be interesting yet difficult to construct more solution formulas for system (2).
References
Ablowitz, MJ, Clarkson, PA: Solitons, Nonlinear Evolution Equations and Inverse Scattering. Cambridge University Press, Cambridge (1991)
Zhang, HQ, Tian, B, Li, LL, Xue, YS: Darboux transformation and soliton solutions for the \((2+1)\)-dimensional nonlinear Schrödinger hierarchy with symbolic computation. Physica A 388(1), 9-20 (2009)
Maruno, KI, Ohta, Y: Localized solitons of a \((2 +1)\)-dimensional nonlocal nonlinear Schrödinger equation. Phys. Lett. A 372(24), 4446-4450 (2008)
Zhu, HJ, Chen, YM, Song, SH, Hu, HY: Symplectic and multi-symplectic wavelet collocation methods for two-dimensional Schrödinger equations. Appl. Numer. Math. 61(3), 308-321 (2011)
Malomed, B, Torner, L, Wise, F, Mihalache, D: On multidimensional solitons and their legacy in contemporary atomic, molecular and optical physics. J. Phys. B, At. Mol. Opt. Phys. 49, 170502 (2016)
Malomed, BA: Multidimensional solitons: well-established results and novel findings. Eur. Phys. J. Spec. Top. 225(13), 2507-2532 (2016)
Mihalache, D: Localized structures in nonlinear optical media: a selection of recent studies. Rom. Rep. Phys. 67(4), 1383-1400 (2015)
Bagnato, VS, Frantzeskakis, DJ, Kevrekidis, PG, Malomed, BA, Mihalache, D: Bose-Einstein condensation: twenty years after. Rom. Rep. Phys. 67(1), 5-50 (2015)
Ruan, HY, Chen, YX: Symmetries and dromion solution of a \((2+1)\)-dimensional nonlinear Schrödinger equation. Acta Phys. Sin. 8(4), 241-251 (1999)
Zhang, JF: Generalized dromions of the \((2+1)\)-dimensional nonlinear Schrödinger equations. Commun. Nonlinear Sci. Numer. Simul. 6(1), 50-53 (2001)
Ma, WX, You, Y: Solving the Korteweg-de Vries equation by its bilinear form: Wronskian solutions. Trans. Am. Math. Soc. 357(5), 1753-1778 (2005)
Ma, WX, Li, CX, He, JS: A second Wronskian formulation of the Boussinesq equation. Nonlinear Anal. TMA 70(12), 4245-4258 (2009)
Ma, WX: Complexiton solutions to integrable equations. Nonlinear Anal. 63, e2461 (2005)
Ma, WX: Complexiton solutions to the Korteweg-de Vries equation. Phys. Lett. A 301(1-2), 35-44 (2002)
Chen, DY, Zhang, DJ, Bi, JB: New double Wronskian solutions of the AKNS equation. Sci. China Math. 51(1), 55-69 (2008)
Chen, S, Grelu, P, Mihalache, D, Baronio, F: Families of rational soliton solutions of the Kadomtsev-Petviashvili I equation. Rom. Rep. Phys. 68(4), 1407-1424 (2016)
Ma, WX, You, Y: Rational solutions of the Toda lattice equation in Casoratian form. Chaos Solitons Fractals 22, 395-406 (2004)
Ohta, Y, Yang, JK: Dynamics of rogue waves in the Davey-Stewartson II equation. J. Phys. A, Math. Theor. 46, 105202 (2013)
Hirota, R: The Direct Method in Soliton Theory. Cambridge University Press, Cambridge (2004)
Freeman, NC, Nimmo, JJC: Soliton solutions of the Korteweg-de Vries and Kadomtsev-Petviashvili equations: the Wronskian technique. Phys. Lett. A 95(1), 1-3 (1983)
Nimmo, JJC, Freeman, NC: A method of obtaining the N-soliton solution of the Boussinesq equation in terms of a Wronskian. Phys. Lett. A 95(1), 4-6 (1983)
Acknowledgements
The authors express their sincere thanks to the Referees and Editor for their valuable comments.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
Both authors contributed equally to the manuscript and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Gao, L., Cheng, L. Multiple-soliton solutions and a generalized double Wronskian determinant to the \((2+1)\)-dimensional nonlinear Schrödinger equations. Adv Differ Equ 2017, 172 (2017). https://doi.org/10.1186/s13662-017-1235-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-017-1235-x