
Abstract
This paper reports a new spectral collocation technique for solving fractional Stokes’ first problem for a heated generalized second grade fluid (FSFP-HGSGF). We develop a collocation scheme to approximate FSFP-HGSGF by means of the shifted Jacobi-Gauss-Lobatto collocation (SJ-GL-C) and shifted Jacobi-Gauss-Radau collocation (SJ-GR-C) methods. The discussed numerical tests illustrate the capability and high accuracy of the proposed methodologies.
Similar content being viewed by others

1 Introduction
In recent years, spectral methods (see [1–8]) have often turned out to be efficient and highly accurate schemes when compared with the local methods. The speed of convergence is one of the great advantages of spectral methods. Besides, spectral methods have exponential rates of convergence; they also have a high level of accuracy. The main idea of all versions of spectral methods is to express the approximate solution of the problem as a finite sum of certain basis functions (orthogonal polynomials or a combination of them) and then choose the coefficients in order to minimize the difference between the exact and approximate solutions as well as possible. The spectral collocation method is a specific type of spectral methods, which is more applicable and widely used to solve almost all types of the differential equations [9–12].
The Stokes’ problem based on the Navier-Stokes theory was studied in several articles; see for example [13–21]. Recently, the first problem of Stokes has become more significant due to its applications. The flow of an Oldroyd-B fluid over a suddenly moved flat plate has been described by Stokes’ first problem in [22]. The first problem of Stokes for Oldroyd-B fluid in a porous half-space and a heated boundary second grade fluid in a porous half-space has been discussed by Tan et al. [23, 24]. Shen et al. [25] introduced the fractional derivative model of the Rayleigh-Stokes problem for a heated generalized second grade. The numerical study based on Laguerre-Galerkin method [26] has been introduced for the first problem of Stokes, which describes a Newtonian fluid in a non-Darcian porous half-space.
Fractional calculus [27–36] is a branch of calculus theory, which makes partial differential equations more convenient to describe many phenomena in several fields such as fluid mechanics, chemistry [33, 34], biology [35], viscoelasticity [36], engineering, finance, and physics [37] fields. Bhrawy et al. [38] proposed an accurate Jacobi collocation algorithm for the systems of high-order linear differential-difference equations with mixed initial conditions. The Jacobi pseudospectral method has been discussed by Bhrawy et al. [39] to solve a class of functional-differential equations. Moreover, Bhrawy et al. [40] introduced a combination of Jacobi Gauss-Lobatto and Gauss-Radau collocation algorithms for solving the fractional Fokker-Planck equations. In this paper, the SJ-GL-C and SJ-GR-C methods are proposed to solve multi-dimensional FSFP-HGSGF. The solution of such equation is approximated by means of a finite expansion of shifted Jacobi polynomials for independent variables. The proposed collocation scheme is investigated for both temporal and spatial discretizations. Then we evaluate the residuals of the FSFP-HGSGF at the shifted Jacobi-Gauss-Lobatto (SJ-GL) and shifted Jacobi-Gauss-Radau (SJ-GR) quadrature points. Thereby, the problem is reduced to a system of algebraic equations which is far easier to solve. Indeed, with the freedom to select the shifted Jacobi indices \(\alpha >-1\) and \(\beta >-1\), the method can be calibrated for a wide variety of problems. To the best of our knowledge, there are no results on SJ-GL-C and SJ-GR-C methods for FSFP-HGSGF.
This paper is organized as follows. A few facts of shifted Jacobi polynomials and fractional calculus are listed in Section 2. In Section 3, we introduce a new collocation method for the one-dimensional space FSFP-HGSGF. In Section 4, the proposed scheme is successfully extended to solve the two-dimensional space FSFP-HGSGF. Section 5 is used to solve several problems. A conclusion is given in the last section.
2 Mathematical preliminaries
2.1 Fractional calculus
The fractional integration definition of order \(\nu>0\), can be expressed by several formulas and in general they are not equal to each other. The most often used definitions are the Caputo and Riemann-Liouville definitions.
Definition 2.1
The operator \(J^{\nu}\) of Riemann-Liouville fractional integral is defined as
where
The properties listed below are satisfied for the operator \(J^{\nu}\)
Definition 2.2
The next equation defines the Riemann-Liouville fractional derivative \(D^{\nu}\) of order ν
where m is the ceiling function of ν.
Definition 2.3
The Caputo fractional derivative of order ν is defined as
where m is the ceiling function of ν.
2.2 Properties of shifted Jacobi polynomials
Some few properties of shifted Jacobi polynomials are presented in this subsection. In the following, a few relations related to Jacobi polynomials are listed:
where \(\alpha, \beta>-1\), \(x\in[-1,1]\), and
Moreover, the rth derivative (r is an integer) of \(P_{j}^{(\alpha ,\beta)}(x)\) may be obtained from
For the shifted Jacobi polynomial \(P_{L,k}^{(\alpha,\beta )}(x)=P_{k}^{(\alpha,\beta)}(\frac{2x}{L}-1)\), \(L>0\), the explicit analytic form is written as
Thus, we can derive the following properties
Assuming that \(w_{L}^{(\alpha,\beta)}(x)=(L-x)^{\alpha}x^{\beta}\), we can define the norm and inner product for the weighted space \(L_{w_{L}^{(\alpha,\beta)}}^{2}[0,L]\) as
The set of shifted Jacobi polynomials forms a complete \(L_{w_{L}^{(\alpha,\beta)}}^{2}[0,L]\)-orthogonal system. Moreover, and due to (2.12), we have
We used \(x^{(\alpha,\beta)}_{N,j}\), and \(\varpi^{(\alpha ,\beta)}_{N,j}\), \(0\leqslant j\leqslant N\), as the nodes and Christoffel numbers of the standard Jacobi-Gauss interpolation on the interval \([-1, 1]\).
The corresponding nodes and corresponding Christoffel numbers of the shifted Jacobi-Gauss interpolation on the interval \([0,L]\) can be given by
For any \(\phi\in S_{2N+1}[0,L]\) and using the Jacobi-Gauss quadrature property, we have
3 One-dimensional space of fractional Stokes problem
In this section, we introduce a numerical algorithm based on the SJ-GR-C and SJ-GL-C methods for solving numerically one-dimensional FSFP-HGSGF. The collocation points are selected at the SJ-GR and SJ-GL interpolation nodes for temporal and spatial variables, respectively. The core of the proposed method consists of discretizing the one-dimensional FSFP-HGSGF to create a system of algebraic equations of the unknown coefficients. This system can then easily be solved with a standard numerical scheme.
In particular, we consider the following FSFP-HGSGF:
with the initial-boundary conditions
where \(H(x,t)\), \(g_{1}(x)\), \(g_{2}(t)\), and \(g_{3}(t)\) are given functions, \(0<\gamma<1\) and \(D^{1-\gamma}_{t}u(x,t)\) is the temporal fractional derivative of order \(1-\gamma\) in the Riemann-Liouville sense.
We are interested in using the SJ-GL-C and SJ-GR-C methods to transform the previous FSFP-HGSGF into a system of algebraic equations. In order to do this, we approximate the independent space variable x using the SJ-GL-C method at the \(x^{(\alpha_{1},\beta_{1})}_{L,N,i}\) nodes, while the independent temporal variable t was approximated by the SJ-GR-C methods. The nodes are the set of points in a specified domain where the dependent variable values are to be approximated. In general, the choice of the location of the nodes is optional. However, taking the roots of the shifted Jacobi orthogonal polynomials, referred to as shifted Jacobi collocation points, gives particularly accurate solutions for the spectral methods.
Now, we outline the main steps of the mixed SJ-GL-C and SJ-GR-C methods for solving the one-dimensional space FSFP-HGSGF. We choose the approximate solution to be of the form
where \(f^{i,j}_{0}(x,t)=P_{L,i}^{(\alpha_{1},\beta_{1})}(x)P_{T,j}^{(\alpha _{2},\beta_{2})}(t)\).
Then the spatial partial derivatives \(\frac{\partial u(x,t)}{\partial x}\) and \(\frac{\partial^{2} u(x,t)}{\partial x^{2}}\) were computed as
where \(f^{i,j}_{1}(x,t)=\frac{\partial P_{L,i}^{(\alpha_{1},\beta _{1})}(x)}{\partial x}P_{T,j}^{(\alpha_{2},\beta_{2})}(t)\) and \(f^{i,j}_{2}(x,t)=\frac{\partial^{2} P_{L,i}^{(\alpha_{1},\beta _{1})}(x)}{\partial x^{2}}P_{T,j}^{(\alpha_{2},\beta_{2})}(t)\).
Furthermore, the temporal derivative \(\frac{\partial u(x,t)}{\partial t}\) is evaluated as
where \(f^{i,j}_{3}(x,t)=P_{L,i}^{(\alpha_{1},\beta_{1})}(x)\frac{\partial P_{T,j}^{(\alpha_{2},\beta_{2})}(t)}{\partial t}\).
Moreover, the Riemann-Liouville fractional partial derivative \(D^{1-\gamma}_{t} \frac{\partial^{2} u(x,t)}{\partial x^{2}}\) is given by
where \(f^{i,j}_{4}(x,t)=\frac{\partial^{2} P_{L,i}^{(\alpha_{1},\beta _{1})}(x)}{\partial x^{2}}D^{1-\gamma}_{t}(P_{T,j}^{(\alpha_{2},\beta_{2})}(t))\).
Now, adopting (3.3)-(3.7) enables one to write (3.1) in the form
The initial condition immediately gives
while the numerical treatments of the boundary conditions are
In the proposed mixed SJ-GL-C and SJ-GR-C methods, the residual of (3.8) is set to zero at \(M (N-1)\) of SJ-GL and SJ-GR points. Consequently, we find
where
For the dependence on equations (3.9) and (3.10), we obtain
and
Combining equations (3.11), (3.12), (3.13), and (3.14), we obtain
the previous system of algebraic equations can easily be solved. After the coefficients \(a_{i,j}\) are determined, it is straightforward to compute the approximate solution \(u_{N,M}(x,t)\) at any value of \((x,t)\) in the given domain from the following equation:
4 Two-dimensional space of fractional Stokes problem
In the present section, we extend the previous algorithm to numerically solve the two-dimensional space FSFP-HGSGF in the following form:
subject to the initial-boundary conditions
where \(H(x,y,t)\), \(g_{0}(x,y)\), \(g_{1}(y,t)\), \(g_{2}(y,t)\), \(g_{3}(x,t)\), and \(g_{4}(x,t)\) are given real valued functions and \(u(x,y,t)\) is an unknown function. Therefore, the SJ-GL-C and SJ-GR-C methods will be applied to transform the previous two-dimensional FSFP-HGSGF into a system of algebraic equations. The SJ-GL-C and SJ-GR-C have been used for the space \((x,y)\) and time t approximations, respectively.
Now, we outline the main steps of the collocation method for solving the two-dimensional FSFP-HGSGF. Let
where \(f^{i,j,k}_{0}(x,y,t)=P_{L_{1},i}^{(\alpha_{1},\beta _{1})}(x)P_{L_{2},j}^{(\alpha_{2},\beta_{2})}(y)P_{T,k}^{(\alpha_{3},\beta_{3})}(t)\).
Then the first spatial and temporal partial derivatives \(\frac {\partial u(x,y,t)}{\partial x}\), \(\frac{\partial u(x,y,t)}{\partial y}\), and \(\frac{\partial u(x,y,t)}{\partial t}\) can be computed as
where
The second spatial partial derivatives \(\frac{\partial^{2} u(x,y,t)}{\partial x^{2}}\) and \(\frac{\partial^{2} u(x,y,t)}{\partial y^{2}}\) are given by
where
Moreover, the Riemann-Liouville fractional derivatives \(D^{1-\gamma }_{t} \frac{\partial^{2} u(x,y,t)}{\partial x^{2}}\) and \(D^{1-\gamma}_{t} \frac{\partial^{2} u(x,y,t)}{\partial y^{2}}\) are given by
where
Therefore, adopting (4.3)-(4.6) enables one to write (4.1) in the form
Moreover, the collocation treatments of the initial-boundary conditions immediately give
In the proposed method, the residual of (4.1) is set to be zero at \((N-1)\times(M-1)\times K\) of the collocation points
where
and from the initial conditions, we have, namely, \((1 + N + 2 K N + M (1 + 2 K + N))\) algebraic equations
and this, in turn, yields \((M+1)\times(N+1)\times(K+1)\) algebraic equations
The previous system of algebraic equations can easily be solved. After the coefficients \(a_{i,j,k}\) are determined, we compute the approximate solution \(u_{N,M,K}(x,y,t)\) at any value of \((x,y,t)\) in the given domain.
5 Numerical results and comparisons
This section listed several numerical examples to demonstrate the accuracy of the proposed method. Also, we compare our numerical results with the existing numerical results [41–44]. The obtained results of these examples show that the proposed method, by selecting a few number nodes, has a high level of accuracy.
The difference between the measured value of the approximate solution and the exact solution is defined as the absolute error (AE), given by
where \(u(x,t)\) and \(u_{N,M}(x,t)\) are the exact and the approximate solutions at the point \((x,t)\), respectively.
Moreover, the maximum absolute error (MAE) is given by
Example 1
Consider the FSFP-HGSGF of the following form [41]:
where the exact solution is given by \(u(x,t) = e^{x} t^{\gamma+2}\).
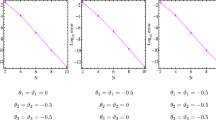
In Table 1, we display a comparison based on the MAEs between our results at \(\alpha _{1}=\beta _{1}=\frac{1}{2}\), \(\alpha _{2}=\beta _{2}=0\) with various choices of N, M, and γ and those in [41]. Figure 1 compares graphically the curves of numerical and exact solutions of problem (5.3) for the different values of t at \(N=8\), \(M=32\), \(\alpha _{1}=\beta _{1}=\alpha _{2}=\beta _{2}=0\), and \(\gamma=0.4\). Moreover, we represent in Figure 2 the logarithmic graphs of MAEs (i.e., \(\log_{10} M_{E}\)) obtained by the present method with different values of N (\(N=M=4, 6, \ldots, 26\)) where \(\alpha _{1}=\beta _{1}=\alpha _{2}=\beta _{2}=0\). This demonstrates that the proposed method leads to an accurate approximation and yields exponential convergence rates.

t -direction curves of exact and numerical solutions of problem ( 5.3 ).

\(\pmb{M_{E}}\) convergence of problem ( 5.3 ).
Example 2
Here, we test the following FSFP-HGSGF [42]:
The exact solution of this problem has the form
Table 2, displays the MAEs using the present method together with the results obtained in [42] for different choices of N, M. From the results of this example, we observe that the approximate solution by our method is better than those obtained in [42].
Example 3
Finally, we introduce the two-dimensional FSFP-HGSGF [43, 44]:
The exact solution of this problem has the form
In the last example, a comparison is listed in Table 3 between the MAEs for Example 3 obtained in [43] and the results obtained in this paper at different choices of N, M. The results confirm the high accuracy of the present scheme. A comparison between the results obtained by the novel method with the corresponding results obtained by the compact finite difference scheme [44] is displayed in Table 4, with \(\alpha_{1}=\beta_{1}=\alpha_{2}=\beta_{2}=\frac{1}{2}\), and \(\alpha _{3}=\beta_{3}=0\).
In Figure 3, we plot the space graph of the AE for Example 3 for \(N=M=6\), \(K=24\), and \(\alpha_{1}=\beta_{1}=\alpha_{2}=\beta_{2}=\frac {1}{2}\), \(\alpha_{3}=\beta_{3}=0\) at \(t=0.5\). The AE curve of Example 3 for \(N=M=6\), \(K=24\), and \(\alpha_{1}=\beta_{1}=\alpha_{2}=\beta_{2}=\frac {1}{2}\), \(\alpha_{3}=\beta_{3}=0\) is sketched in Figure 4 at \(x=0.5\) and \(y=0.25\).

Space graph of the AE for Example 3 .

The AE versus t in Example 3 .
6 Conclusion
We have presented a new space-time spectral algorithm based on the shifted Jacobi-Gauss-Lobatto and the shifted Jacobi-Gauss-Radau collocation schemes. Based on the numerical results given in Section 5, it has been concluded that the obtained results are excellent in terms of accuracy for all tested problems. We have outlined the implementation of spectral collocation method for solving similar problems with a one- or two-dimensional space. In addition, this method may be extended to related problems. Furthermore, the proposed spectral method might be further developed by considering the generalized Laguerre or modified generalized Laguerre polynomials to solve similar problems in semi-infinite spatial intervals.
References
Canuto, C, Hussaini, MY, Quarteroni, A, Zang, TA: Spectral Methods: Fundamentals in Single Domains. Springer, New York (2006)
Doha, EH, Bhrawy, AH, Abdelkawy, MA, Hafez, RM: A Jacobi collocation approximation for nonlinear coupled viscous Burgers’ equation. Cent. Eur. J. Phys. 12, 111-122 (2014)
Doha, EH, Bhrawy, AH, Abdelkawy, MA: An accurate Jacobi pseudo-spectral algorithm for parabolic partial differential equations with non-local boundary conditions. J. Comput. Nonlinear Dyn. 10, 021016 (2015)
Abd-Elhameed, WM, Ahmed, HM, Youssri, YH: A new generalized Jacobi Galerkin operational matrix of derivatives: two algorithms for solving fourth-order boundary value problems. Adv. Differ. Equ. (2016). doi:10.1186/s13662-016-0753-2
Abdelkawy, MA, Taha, TM: An operational matrix of fractional derivatives of Laguerre polynomials. Walailak J. Sci. Technol. 11, 1041-1055 (2014)
Bhrawy, AH, Abdelkawy, MA: A fully spectral collocation approximation for multi-dimensional fractional Schrodinger equations. J. Comput. Phys. 294, 462-483 (2015)
Bhrawy, AH, Zaky, MA, Tenreiro Machado, JA: Efficient Legendre spectral tau algorithm for solving the two-sided space-time Caputo fractional advection-dispersion equation. J. Vib. Control (2015). doi:10.1177/1077546314566835
Bhrawy, AH, Taha, TM, Tenreiro Machado, JA: A review of operational matrices and spectral techniques for fractional calculus. Nonlinear Dyn. 81, 1023-1052 (2015)
Bhrawy, AH: An efficient Jacobi pseudospectral approximation for nonlinear complex generalized Zakharov system. Appl. Math. Comput. 247, 30-46 (2014)
Bhrawy, AH, Mallawi, F, Abdelkawy, MA: New spectral collocation algorithms for one- and two-dimensional Schrödinger equations with a Kerr law nonlinearity. Adv. Differ. Equ. (2016). doi:10.1186/s13662-016-0752-3
Bhrawy, AH: A Jacobi spectral collocation method for solving multi-dimensional nonlinear fractional sub-diffusion equations. Numer. Algorithms (2015). doi:10.1007/s11075-015-0087-2
Bhrawy, AH, Zaky, MA: Numerical simulation for two-dimensional variable-order fractional nonlinear cable equation. Nonlinear Dyn. 80, 101-116 (2015)
Zierep, J: Similarity Laws and Modeling. Dekker, New York (1971)
Soundalgekar, VM: Stokes problem for elastico-viscous fluid. Rheol. Acta 13, 177-179 (1981)
Rajagopal, KR, Na, TY: On Stokes’ problem for a non-Newtonian fluid. Acta Mech. 48, 233-239 (1983)
Puri, P: Impulsive motion of a flat plate in a Rivlin-Ericksen fluid. Rheol. Acta 23, 451-453 (1984)
Bandelli, R, Rajagopal, KR, Galdi, GP: On some unsteady motions of fluids of second grade. Arch. Mech. 47, 661-676 (1995)
Böhme, G: Strömungsmechanik nicht-newtonscher fluide. Teubner, Stuttgart (2000)
Tigoiu, V: Stokes flow for a class of viscoelastic fluids. Rev. Roum. Math. Pures Appl. 45, 375-382 (2000)
Fetecau, C, Zierep, J: On a class of exact solutions of the equations of motion of a second grade fluid. Acta Mech. 150, 135-138 (2001)
Fetecau, C, Fetecau, C: A new exact solution for the flow of a Maxwell fluid past an infinite plate. Int. J. Non-Linear Mech. 38, 423-427 (2002)
Fetecau, C, Fetecau, C: The first problem of Stokes for an Oldroyd-B fluid. Int. J. Non-Linear Mech. 38, 1539-1544 (2003)
Tan, WC, Masuoka, T: Stokes’ first problem for an Oldroyd-B fluid in a porous half-space. Phys. Fluids 17, 023101 (2005)
Tan, WC, Masuoka, T: Stokes’ first problem for a second grade fluid in a porous half-space with heated boundary. Int. J. Non-Linear Mech. 40, 515-522 (2005)
Shen, F, Tan, WC, Zhao, Y, Masuoka, T: The Rayleigh-Stokes problem for a heated generalized second grade fluid with fractional derivative model. Nonlinear Anal. 7, 1072-1080 (2006)
Akyildiz, FT: Stokes’ first problem for a Newtonian fluid in a non-Darcian porous half-space using a Laguerre-Galerkin method. Math. Methods Appl. Sci. 30, 2263-2277 (2007)
Garrappa, R, Popolizio, M: On the use of matrix functions for fractional partial differential equations. Math. Comput. Simul. 81, 1045-1056 (2011)
Atangana, A, Alabaraoye, E: Solving a system of fractional partial differential equations arising in the model of HIV infection of CD4+ cells and attractor one-dimensional Keller-Segel equations. Adv. Differ. Equ. (2013). doi:10.1186/1687-1847-2013-94
Tariboon, J, Ntouyas, SK, Agarwal, P: New concepts of fractional quantum calculus and applications to impulsive fractional q-difference equations. Adv. Differ. Equ. (2015). doi:10.1186/s13662-014-0348-8
Atangana, A: On the solution of an acoustic wave equation with variable-order derivative loss operator. Adv. Differ. Equ. (2013). doi:10.1186/1687-1847-2013-167
Li, C, Deng, W: Remarks on fractional derivatives. Appl. Math. Comput. 187, 777-784 (2007)
Cafagna, D: Fractional calculus: a mathematical tool from the past for the present engineer. IEEE Ind. Electron. Mag. 1, 35-40 (2007)
Kirchner, JW, Feng, X, Neal, C: Fractal stream chemistry and its implications for contaminant transport in catchments. Nature 403, 524-526 (2000)
Giona, M, Roman, HE: Fractional diffusion equation for transport phenomena in random media. Physica A 185, 87-97 (1992)
Magin, RL: Fractional Calculus in Bioengineering. Begell House, Redding (2006)
Podlubny, I: Fractional Differential Equations. Mathematics in Science and Engineering. Academic Press, San Diego (1999)
Hilfer, R: Applications of Fractional Calculus in Physics. Word Scientific, Singapore (2000)
Bhrawy, AH, Doha, EH, Baleanu, D, Hafez, RM: A highly accurate Jacobi collocation algorithm for systems of high-order linear differential-difference equations with mixed initial conditions. Math. Methods Appl. Sci. 38, 3022-3032 (2015)
Bhrawy, AH, Alghamdi, MA, Baleanu, D: Numerical solution of a class of functional-differential equations using Jacobi pseudospectral method. Abstr. Appl. Anal. 2013, 513808 (2013). doi:10.1155/2013/513808
Hafez, RM, Ezz-Eldien, SS, Bhrawy, AH, Ahmed, EA: A Jacobi Gauss-Lobatto and Gauss-Radau collocation algorithm for solving fractional Fokker-Planck equations. Nonlinear Dyn. 82, 1431-1440 (2015)
Chunhong, W: Numerical solution for Stokes’ first problem for a heated generalized second grade fluid with fractional derivative. Appl. Numer. Math. 59, 2571-2583 (2009)
Chen, CM, Liu, F, Anh, V: A Fourier method and an extrapolation technique for Stokes’ first problem for a heated generalized second grade fluid with fractional derivative. J. Comput. Appl. Math. 223, 777-789 (2009)
Chen, CM, Liu, F, Anh, V: Numerical analysis of the Rayleigh-Stokes problem for a heated generalized second grade fluid with fractional derivatives. Appl. Math. Comput. 204, 340-351 (2008)
Mohebbi, A, Abbaszadeh, M, Dehghan, M: Compact finite difference scheme and RBF meshless approach for solving 2D Rayleigh-Stokes problem for a heated generalized second grade fluid with fractional derivatives. Comput. Methods Appl. Mech. Eng. 264, 163-177 (2013)
Acknowledgements
We acknowledge the Editorial Board and the referees for their efforts and constructive criticism, which have improved the manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The authors have equal contributions to each part of this paper. All the authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Abdelkawy, M.A., Alqahtani, R.T. Shifted Jacobi collocation method for solving multi-dimensional fractional Stokes’ first problem for a heated generalized second grade fluid. Adv Differ Equ 2016, 114 (2016). https://doi.org/10.1186/s13662-016-0845-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-016-0845-z