
Abstract
This paper considers the problem of robust \(H_{\infty}\) control for uncertain continuous singular systems with state delay. The parametric uncertainty is assumed to be norm bounded. By using the linear matrix inequality (LMI) approach, a sufficient condition is presented for a prescribed uncertain singular system with time-delay to have generalized quadratic stability and \(H_{\infty}\) performance. Furthermore, the design methods of state feedback controllers are considered such that the resulting closed-loop system has generalized quadratic stability with \(H_{\infty}\) performance. By means of matrix inequalities, sufficient conditions are derived for the existence of memory-less and memorial static state feedback controllers. The controllers are obtained by the solutions of matrix inequalities.
Similar content being viewed by others


1 Introduction
It is well known that a real system inevitably contains some uncertain parameters because of work environment change, measure error, model approximation and so on. The uncertain parameters perhaps change the system structure and even destroy the system. For a practical system, the uncertain parameters should be considered, otherwise, one cannot obtain their desired goals. Recently, robust \(H_{\infty}\) (sub) optimal control has become one of the most important notions in the field of automatic control theory, it has drawn considerable attention from many researchers. Although robust \(H_{\infty}\) control theory has been perfectly developed over the last decade, most of the results were developed based on uncertain linear systems [1–4]. Besides, some physical phenomena, like impulse and hysterics, which are important in circuit theory, cannot be treated in the linear system models. It is well known that time delay is frequently encountered in a variety of industrial and engineering systems, and it has become one of the main sources for causing instability and poor performance of the network system [5, 6].
Singular systems are also referred to as generalized systems, descriptor systems, differential-algebraic systems, or implicit systems, which are also a natural representation of dynamic systems and describe a larger family of systems than the normal linear systems [7]. A singular system provides a suitable way to handle such problems, the robust control theory based on singular system models has been widely developed for many years. Dai first gave some notions of controllability, observability and duality in singular systems [8], some excellent results on disk pole constraints [9] and robust control [10, 11]. Problem of control and stabilization for uncertain dynamical systems with deviating argument is modern now. For example, robust stability and \(H_{\infty}\) were studied for uncertain systems with impulsive perturbations [12]. Moreover, robust \(H_{\infty}\) synchronization was studied for chaotic systems with input saturation and time varying delay [13]. In [14, 15], stabilization and perturbation estimation were studied in neutral type direct control systems. In [16], stabilization was studied for Lur’e-type nonlinear control systems by using Lyapunov-Krasovskii functionals. In addition, dissipativity was studied for singular systems with Markovian jump parameters and mode-dependent mixed time-delays [7]. However, for the singular system, robust \(H_{\infty}\) control problem has been little considered with uncertainties and time-delay recently.
In this paper, by means of linear matrix inequalities (LMIs), we present sufficient conditions for the existence of memory-less and memorial linear state feedback controllers such that the closed-loop system not only has \(H_{\infty}\) performance, but it also is generalized quadratically stable; moreover, the design methods for such controllers are also provided.
2 System description and preliminaries
Consider a linear singular system with state delay and parameter uncertainties described by
where \(x(t)\in R^{n}\) is the state, \(\omega(t)\in R^{m}\) is the exogenous input with \(\omega(t)\in L_{2}[0,\infty)\), \(z(t)\in R^{p}\) is the controlled output, \(u(t)\in R^{q}\) is the control input. E, A, \(A_{d}\), \(B_{1}\), \(B_{2}\), \(C_{1}\), \(C_{1d}\), \(D_{11}\) and \(D_{12}\) are known real constant matrices with appropriate dimensions, \(\operatorname{rank}E=r< n\). \(d>0\) is a constant time delay, \(\phi(t)\) is a compatible vector-valued continuous function. ΔA, \(\Delta A_{d}\), \(\Delta B_{1}\), \(\Delta B_{2}\), \(\Delta C_{1}\), \(\Delta C_{1d}\), \(\Delta D_{11}\) and \(\Delta D_{12}\) are time-invariant matrices representing norm-bounded parameter uncertainties and are assumed to be of the following form:
where \(H_{1}\), \(H_{2}\), \(E_{1}\), \(E_{2}\), \(E_{3}\) and \(E_{4}\) are known real constant matrices with appropriate dimensions. The uncertain matrix \(F(\sigma)\)satisfies
and \(\sigma\in\Theta\), where Θ is a compact set in R. Furthermore, it is assumed that given any matrix F: \(F^{T}F\leq I\), there exists \(\sigma\in\Theta\) such that \(F=F(\sigma)\).
ΔA, \(\Delta A_{d}\), \(\Delta B_{1}\), \(\Delta B_{2}\), \(\Delta C_{1}\), \(\Delta C_{1d}\), \(\Delta D_{11}\) and \(\Delta D_{12}\) are said to be admissible if both (2) and (3) hold.
The nominal unforced system of (1) can be written as
Lemma 1
[11]
Suppose that the pair \((E,A)\) is regular and impulse free, then the solution to (4) exists and is impulse free and unique on \([0, \infty)\).
Definition 1
-
(1)
The singular delay system (4) is said to be regular and impulse free if the pair \((E,A)\) is regular and impulse free.
-
(2)
The singular delay system (4) is said to be asymptotically stable if for any \(\epsilon>0\), there exists a scalar \(\delta(\epsilon)>0\) such that, for any compatible initial conditions \(\phi(t)\) satisfying \(\sup_{-d\leq t\leq0}\|\phi(t)\|\leq\delta(\epsilon)\), the solution \(x(t)\) of system (4) satisfies \(\|x(t)\|\leq\epsilon\) for \(t\geq 0\). Furthermore, \(x(t)\rightarrow0\), \(t\rightarrow\infty\).
Definition 2
[17]
The uncertain singular delay system (1) is said to be robust stable if system (1) with \(u(t)\equiv0\) and \(\omega(t)\equiv0\) is regular, impulse free and asymptotically stable for all admissible uncertainties ΔA, \(\Delta A_{d}\).
Definition 3
[11]
The uncertain singular delay system (1) is said to be generalized quadratically stable if there exists a matrix \(X>0\) such that
for all admissible uncertainties ΔA, \(\Delta A_{d}\).
Lemma 2
[11]
If the uncertain singular delay system (1) is generalized quadratically stable, then it is robustly stable.
Lemma 3
[18]
Given matrices Ω, Γ, Ξ of appropriate dimensions and with Ω symmetrical, then
for all \(F(\sigma)\) satisfying (3), if and only if there exists a scalar \(\epsilon> 0\) such that
The robust \(H_{\infty}\) problem we consider in this paper is, for an uncertain singular delay system and a given constant \(\gamma> 0\), under zero initial state if
for all admissible uncertainties, then we say the system has \(H_{\infty}\) performance γ.
3 Main results
Theorem 1
For the unforced uncertain singular delay system of (1) (i.e., \(u(t)\equiv0\)) and a given constant \(\gamma> 0\), if there exist a matrix \(P>0\) and a scalar \(\epsilon>0\) satisfying the following LMI:
then the system is generalized quadratically stable with \(H_{\infty}\) performance γ.
Proof
For simplicity, we introduce
Let \(X=P\), then (5) is the same as
Combing (2), (3) and Lemma 3, (7) is equivalent to
for a scalar \(\epsilon> 0\), which is equivalent to
by invoking again a Schur complement argument and (8) is already by (6). Hence, the unforced uncertain singular delay system of (1) is generalized quadratically stable.
Then we prove that the system has \(H_{\infty}\) performance γ.
Let the candidate on Lyapunov-Krasovskii functional [19] be as follows:
Obviously, \(V(x_{t})\geq0\) and
where
Now we consider the condition of \(L<0\). By using a Schur complement argument, it follows that \(L<0\) is equivalent to
By (2) and Lemma 3, (9) holds if and only if
for a scalar \(\epsilon>0\), where
and (10) is equivalent to (6) by a Schur complement argument, then we have
Therefore the system has \(H_{\infty}\) performance γ from dissipative theory. □
Based on Theorem 1, we will further discuss the robust \(H_{\infty}\) control problem via state feedback for system (1).
Consider a memory-less state feedback controller as follows:
Then the resulting closed-loop system is
where
From Theorem 1, we can easily obtain the following theorem.
Theorem 2
For system (1) and a given constant \(\gamma>0\), if there exist matrices \(P>0\), K and a scalar \(\epsilon>0\) satisfying the following matrix inequality:
where
then there exists a memory-less state feedback controller such that the closed-loop uncertain delay singular system is generalized quadratically stable with \(H_{\infty}\) performance γ; moreover, the controller can be of the form (11).
Remark 1
According to Theorem 2, a controller can be obtained by solving the matrix inequality (13). However, it is worth pointing out that (13) is not a linear matrix inequality, so it cannot be solved using the LMI Toolbox of Matlab. However, using the method dealing with inequalities which was developed in [20], note that a necessary condition of (13) is
Obviously, (14) is a strict LMI about matrix P and a scalar \(\epsilon>0\), which can be solved numerically very efficiently by using the LMI Toolbox of Matlab.
Substituting the matrix P and the scalar \(\varepsilon>0\) obtained by solving (14) into (13), we can get the strict LMI about K, so the gain matrix can be obtained.
Since a memory-less state feedback controller does not sufficiently use the information of delay state, we want to consider a memorial state feedback controller as follows:
where \(K_{2}\neq0\), then the closed-loop system is
where
Similar to Theorem 2, we have the following conclusion.
Theorem 3
For system (1) and a given constant \(\gamma>0\), if there exist matrices \(P>0\), \(K_{1}\), \(K_{2}\) and a scalar \(\epsilon >0\) satisfying the following matrix inequality:
where
then there exists a memorial state feedback controller such that the closed-loop uncertain delay singular system is generalized quadratically stable with \(H_{\infty}\) performance γ; moreover, the controller can be of the form (15).
Remark 2
According to Theorem 3, a memorial controller can be obtained by solving the matrix inequality (17). However, it is worth pointing out that (17) is not a linear matrix inequality. Similarly, note that a necessary condition of (17) is
Obviously, (18) is a strict LMI about matrix P, \(K_{2}\) and a scalar \(\varepsilon>0\).
Substituting the matrix P, \(K_{2}\) and the scalar \(\varepsilon>0\) obtained by solving (18) into (17), we can get the strict LMI about \(K_{1}\), so the two gain matrices can be obtained.
The robust \(H_{\infty}\) control problem for singular time delay system with norm-bounded parametric uncertainties is considered in this paper. All the coefficient matrices except the matrix E include uncertainties. The authors derive sufficient conditions about the generalized quadratic stability and \(H_{\infty}\) performance of the closed-loop systems. The control laws proposed by using strict LMI approaches can guarantee that the resultant closed-loop systems are generalized quadratic stable for all admissible uncertainties.
4 Numerical examples
In this section, we present an example to illustrate the application of the proposed theoretical method given in this paper.
Example
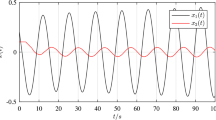
Consider the parameter uncertain singular systems with state delay
Applying Theorem 3, choose \(\gamma=1\). We use the software package LMI Lab to solve the LMI problem (17) of the parameter uncertain singular systems with state delay. The solution is as follows:
A memorial state feedback controller is as follows:
5 Conclusions
A positive solution matrix was proposed for the problem of robust \(H_{\infty}\) control via state feedback for a class of uncertain continuous-time singular systems with state delay. The solution provides sufficient conditions in the form of linear matrix inequalities. It was shown by the numerical example that the proposed method can solve generalized quadratic stability with \(H_{\infty}\) performance for the parameter uncertain continuous-time singular systems with state delay.
References
Khargonerar, PP, Petersen, IP, Zhou, K: Robust stabilization of uncertain linear systems: quadratic stabilization and \(H_{\infty}\) control theory. IEEE Trans. Autom. Control 35, 350-361 (1990)
Kokame, H, Kobyashi, H, Mori, T: Robust \(H_{\infty}\) performance for linear delay-differential systems with time-varying uncertainties. IEEE Trans. Autom. Control 43, 223-226 (1998)
Souza, CE, Li, X: Delay-dependent robust \(H_{\infty}\) control of uncertain linear state-delayed systems. Automatica 35, 1313-1321 (1999)
Wang, Z: Robust \(H_{\infty}\) control for uncertain linear continuous systems with circular pole assignment via output feedback. Syst. Sci. 23, 39-54 (1997)
Cui, W, Sun, S, Fang, J, Xu, Y: Finite-time synchronization of Markovian jump complex networks with partially unknown transition rates. J. Franklin Inst. 351, 2543-2561 (2014)
Cui, W, Fang, J, Zhang, W, Wang, X: Finite-time cluster synchronisation of Markovian switching complex networks with stochastic perturbations. IET Control Theory Appl. 8, 30-41 (2014)
Cui, W, Fang, J, Shen, Y, Zhang, W: Dissipativity analysis of singular systems with Markovian jump parameters and mode-dependent mixed time-delays. Neurocomputing 110, 121-127 (2013)
Dai, L: Singular Control Systems. Springer, Berlin (1989)
Hu, G, Yu, J, Chen, G: Robust control for uncertain singular systems with disk pole constraints. In: Proc. 42nd IEEE Conf. Decision Control, pp. 288-293 (2003)
Xu, S, Yang, C: Stabilization of discrete-time singular systems: a matrix inequalities approach. Automatica 35, 1613-1617 (1999)
Xu, S, Dooren, VP, Lam, J: Robust stability and stabilization for singular systems with state delay and parameter uncertainty. IEEE Trans. Autom. Control 47, 1122-1128 (2002)
Hu, Q, Wang, Z: Robust stability and \(H_{\infty}\) control of uncertain systems with impulsive perturbations. Adv. Differ. Equ. (2014). doi:10.1186/1687-1847-2014-79
Ma, Y, Jing, J: Robust \(H_{\infty}\) synchronization of chaotic systems with input saturation and time varying delay. Adv. Differ. Equ. (2014). doi:10.1186/1687-1847-2014-124
Shatyrko, A, Khusainov, D: On a stabilization method in neutral type direct control systems. J. Autom. Inf. Sci. 45, 1-10 (2013)
Shatyrko, A, Khusainov, D, Diblik, J, Bastinec, J, Rivolova, A: Estimates of perturbation of nonlinear indirect interval control system of neutral type. J. Autom. Inf. Sci. 43, 13-28 (2011)
Shatyrko, A, Diblik, J, Khusainov, D, Ruzickova, M: Stabilization of Lur’e-type nonlinear control systems by Lyapunov-Krasovskii functionals. Adv. Differ. Equ. (2014). doi:10.1186/1687-1847-2012-229
Feng, J, Zhu, S, Cheng, Z: Guaranteed cost control of linear uncertain singular time-delay systems. In: Proc. 41st IEEE Conf. Decision Control, pp. 1802-1807 (2002)
Yu, L: Robust Control-Linear Matrix Inequalities Processing Method. Tsinghua University Publishing Company, Beijing (2002)
Elsgolts, LE, Norkin, SB: Introduction to the Theory and Application of Differential Equations with Deviating Arguments. Academic Press, New York (1973)
Zhu, S, Cheng, Z, Feng, J: Robust output feedback stabilization for uncertain singular time delay systems. In: Proc. American Control Conf., pp. 5416-5420 (2004)
Acknowledgements
This work was supported by the National Natural Science Foundation of China under Grant 10571114 and the Henan Province Natural Science Foundation under Grant 0511012000.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
Both authors contributed equally to this work and read and approved the final manuscript.
Rights and permissions
Open Access This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly credited.
About this article

Cite this article
Sun, Y., Kang, Y. Robust \(H_{\infty}\) control for singular systems with state delay and parameter uncertainty. Adv Differ Equ 2015, 87 (2015). https://doi.org/10.1186/s13662-015-0433-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-015-0433-7