
Abstract
In this article, we present an iterative transformation method for solving fractional partial differential equations that combines the Elzaki transform and iterative methods. By this iterative transformation method, numerical solutions in the form of series are obtained. When we apply this method to the fractional linear Klein–Gordon equation, we find that it yields the same results, just like the Homotopy perturbation method. The procedures and results of this method for solving the new generalized fractional Hirota–Satsuma coupled KdV equation are given in the paper.
Similar content being viewed by others

1 Introduction
In recent decades, fractional-order partial differential equations have been widely used and developed in physics, engineering, and fluid mechanics. Compared with integer-order partial differential equations, they are more suitable to portray complex phenomena and processes. Therefore, the method to solve fractional partial differential equations is also a relatively important problem. Now, there are methods to solve fractional-order partial differential equations. For example, in [1], the finite-difference methods, the Galerkin finite-element methods, and the spectral methods to solve fractional-order partial differential equations are mentioned; Gepreel uses the Homotopy perturbation method to obtain the solution of the fractional Klein–Gordon equation in [2]; Khalid used the Elzaki transform method to solve the equations [3]; in [4], Ziane used the fractional Elzaki variational iteration method to solve the equations; Jafari introduced the Iterative Laplace transform method in [5–7]; Tarig used the Sumudutrans form of the variational iteration method to solve linear homogeneous partial differential equations; Thabet [8] introduced a new analytic method to solve partial differential equations with fractional order, and El-Rashidy [9] used the method to obtain new traveling-wave solutions of the equations. Hosseini [10] used the modified Kudryashov method to obtain exact solutions of the coupled sine-Gordon equations. Mohammad Tamsir [11] employed a semianalytical approach to obtain the approximate analytical solution of the Klein–Gordon equations; The Klein–Gordon equation [12, 13] is a crucial equation in the study of relativistic quantum mechanics.
Many authors have solved the generalized Hirota–Satsuma coupled KdV equation utilizing various equations in [14–17], including the homotopy analysis approach [18]. This is a significant class of equations in mathematics and physics. In this study, we employ the Elzaki transform [19, 20] in conjunction with an iterative approach [21] to generate approximations to partial differential equations with fractional order. The results demonstrate the method’s validity, further, it also may be applied to other fractional-order partial differential equations.
2 Basic definition
Definition 1
The fractional Riemann–Liouville of operator \(D^{p}\) is as follows
where \(m\in Z^{+}\), \(p\in R^{+}\) when \(0< p\le 1\),
Definition 2
The Riemann–Liouville integral operator with fractional order is defined as follows
Definition 3
The Caputo fractional derivative of \(w(x)\) is defined as follows, \(m\in N\)
Definition 4
The Elzaki [22, 23] transform of \(w(x)\) is defined as follows
Definition 5
The fractional Caputo operator of the Elzaki transform is [24]
3 Methodology of the Elzaki transform iterative method
To briefly describe this equation in detail, we consider the following fractional partial differential equations
where M and N are the nonlinear and linear operators from Banach space B → B, respectively, \(\alpha \in R^{+}\), \(m-1<\alpha \leq m\), \(m=0,1,\dots ,n\),
subject to the initial condition
Then, the Ezaki transformation acts simultaneously on both sides of the equation, and we obtain
hence,
Through the use of the inverse Elzaki transform, we obtain
The following iterative method is utilized
The nonlinear operator M can be decomposed into
Then, we can obtain
We make the following settings
Finally, we obtain the approximate solution of the fractional-order partial differential equation
Theorem
B is the Banach space, if there exists \(0< K<1\), \(\|w_{n}\| \le K\|w_{n-1}\|\), for \(\forall x\in N\), then the approximate solution \(w(x,t)\) converges to A.
Proof
Define the sequence \(A_{i}\), \(i=0,1,\dots ,n\)
and prove that \((A_{i})_{i\ge 0}\) is a Cauchy sequence, and we consider
for \(m>n>0 \in N\), we have
where \(w_{0}\) is bounded, and we have
Therefore, the sequence \((A_{i})_{i\ge 0}\) is a Cauchy sequence in B, so the solution of Eq. (6) is convergent.
The error estimates are as follows:
□
Remark
Similar proofs can be found in [8].
4 Test example
Example 1
Consider the linear fractional Klein–Gordon equation [25]
subject to the initial condition:
The Elzaki transform of the linear fractional Klein–Gordon equation [26] is
Using the inverse Elzaki transform of the above equation, we obtain
then, we use the iterative method above, and we have
The result is
When \(\alpha =1\), the exact solution of the linear fractional Klein–Gordon equation is as follows:
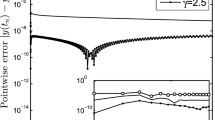
In Fig. 1, the approximate solution of u is depicted for the case where the value of α is 0.01, 0.002, and 0.1.

Graph of \(u(x,t)\) at \(\alpha =0.01\), 0.02, and 0.1 of Example 1
Example 2
Consider the new generalized fractional Hirota–Satsuma coupled KdV equation
subject to the initial condition
When \(\alpha =1\), the exact results of the new generalized Hirota–Satsuma coupled KdV equation is as follows:
The Elzaki transform of the new generalized fractional Hirota–Satsuma coupled KdV equation is
Using the inverse Elzaki transform, we obtain
Next, in terms of the iterative method above, we have
The series-form solution is given as
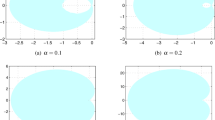
Figure 2 shows the analytic solution of \(u(x,t)\), \(v(x,t)\), and \(w(x,t)\) where \(\alpha =c_{1}=c_{0}=1\), \(k=0.01\), and \(\beta =1\). We can see the exact solution and the approximate solution of the Elzaki iterative method for the case of \(\alpha =1\) from Table 1.

The graph of \(u(x,t)\), \(v(x,t)\), \(and w(x,t)\) when \(\alpha =c_{1}=c_{0}=1\), \(k=0.01\) and \(\beta =1\)
Remark
The reasons for the complexity of the solution are as follows:
1. Selection of initial values; 2. More parameters.
5 Conclusion
In this article, we use the Elzaki transform with an iterative method to solve fractional partial differential equations. We find that the results using the homotopy perturbation method and the method in this article to the Klein–Gordon problem are the same. We see that the errors were not significant by picking specific values. Therefore, employing the Elzaki transform and the iterative method to solve fractional partial differential equations is effective.
Availability of data and materials
Not applicable
Abbreviations
- ES:
-
denotes the exact solution
- AS:
-
denotes the approximate solution
- EE:
-
denotes the error estimate
References
Li, C., Chen, A.: Numerical methods for fractional partial differential equations. Int. J. Comput. Math. 95(6–7), 1048–1099 (2018)
Gepreel, K.A.: The homotopy perturbation method applied to the nonlinear fractional Kolmogorov–Petrovskii–Piskunov equations. Appl. Math. Lett. 24(8), 1428–1434 (2011)
Khalid, M., Sultana, M., Zaidi, F., Arshad, U.: Application of Elzaki transform method on some fractional differential equations. Math. Theory Model. 5, 89–96 (2015)
Ziane, D., Elzaki, T.M., Hamdi Cherif, M.: Elzaki transform combined with variational iteration method for partial differential equations of fractional order. Fundam. J. Math. Appl. 1(1), 102–108 (2018). https://doi.org/10.33401/fujma.415892
Jafari, H., Nazari, M., Baleanu, D., Khalique, C.M.: A new approach for solving a system of fractional partial differential equations. Comput. Math. Appl. 66(5), 838–843 (2013)
Hilal, E., Elzaki, T.M.: Solution of nonlinear partial differential equations by new Laplace variational iteration method. J. Funct. Spaces 2014 (2014)
Mohamed, M.Z., Elzaki, T.M., Algolam, M.S., Elmohmoud, E.M.A., Hamza, A.E.: New modified variational iteration Laplace transform method compares Laplace Adomian decomposition method for solution time-partial fractional differential equations. J. Appl. Math. 2021, 1–10 (2021). https://doi.org/10.1155/2021/6662645
Thabet, H., Kendre, S., Chalishajar, D.: New analytical technique for solving a system of nonlinear fractional partial differential equations. Mathematics 5(4) (2017)
El-Rashidy, K.: New traveling wave solutions for the higher Sharma-Tasso-Olver equation by using extension exponential rational function method. Results Phys. 17, 103066 (2020). https://doi.org/10.1016/j.rinp.2020.103066
Hosseini, K., Mayeli, P., Kumar, D.: New exact solutions of the coupled Sine-Gordon equations in nonlinear optics using the modified Kudryashov method. J. Mod. Opt. 65(3), 361–364 (2018)
Tamsir, M., Srivastava, V.K.: Analytical study of time-fractional order Klein-Gordon equation. Alex. Eng. J. 55(1), 561–567 (2016). https://doi.org/10.1016/j.aej.2016.01.025
El-Sayed, S.M.: The decomposition method for studying the Klein–Gordon equation. Chaos Solitons Fractals 18(5), 1025–1030 (2003)
Kragh, H.: Equation with the many fathers. The Klein–Gordon equation in 1926. Am. J. Phys. 52(11), 1024–1033 (1984)
Tam, H.-W., Ma, W.-X., Hu, X.-B., Wang, D.-L.: The Hirota–Satsuma coupled kdv equation and a coupled Ito system revisited. J. Phys. Soc. Jpn. 69(1), 45–52 (2000)
Fan, E.: Soliton solutions for a generalized Hirota–Satsuma coupled kdv equation and a coupled mkdv equation. Phys. Lett. A 282(1–2), 18–22 (2001)
Wu, Y., Geng, X., Hu, X., Zhu, S.: A generalized Hirota–Satsuma coupled Korteweg–de Vries equation and Miura transformations. Phys. Lett. A 255(4–6), 259–264 (1999)
Abazari, R., Abazari, M.: Numerical simulation of generalized Hirota–Satsuma coupled kdv equation by rdtm and comparison with dtm. Commun. Nonlinear Sci. Numer. Simul. 17(2), 619–629 (2012)
Abbasbandy, S.: The application of homotopy analysis method to solve a generalized Hirota–Satsuma coupled kdv equation. Phys. Lett. A 361(6), 478–483 (2007)
Elzaki, T.M., Ezaki, S.M.: On the Elzaki transform and ordinary differential equation with variable coefficients. Adv. Theor. Appl. Math. 6(1), 41–46 (2011)
Mohamed, M.Z., Elzaki, T.M.: Applications of new integral transform for linear and nonlinear fractional partial differential equations. J. King Saud Univ., Sci. 32(1), 544–549 (2020). https://doi.org/10.1016/j.jksus.2018.08.003
Daftardar-Gejji, V., Jafari, H.: An iterative method for solving nonlinear functional equations. J. Math. Anal. Appl. 316(2), 753–763 (2006)
Elzaki, T.M.: The new integral transform Elzaki transform. Glob. J. Pure Appl. Math. 7(1), 57–64 (2011)
Elzaki, T.M.: On the connections between Laplace and Elzaki transforms. Adv. Theor. Appl. Math. 6(1), 1–11 (2011)
Hilal, E., Elzaki, T.M.: Solution of nonlinear partial differential equations by new Laplace variational iteration method. J. Funct. Spaces 2014 (2014)
Scott, A.C.: A nonlinear Klein-Gordon equation. Am. J. Phys. 37(1), 52–61 (1969)
Alderremy, A.A., Elzaki, T.M., Chamekh, M.: New transform iterative method for solving some Klein-Gordon equations. Results Phys. 10, 655–659 (2018)
Acknowledgements
This work was supported by Hainan Provincial NSF of China with No. 120MS001, the authors would like to express sincere thanks to the referees for their valuable suggestions and comments.
Funding
Supported by Hainan Provincial NSF of China with No. 120MS001.
Author information
Authors and Affiliations
Contributions
These authors contributed equally to this work.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
The manuscript is original, has not already been published, and is not currently under consideration by another journal.
Consent for publication
Not applicable
Competing interests
The authors declare no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
He, Y., Zhang, W. Application of the Elzaki iterative method to fractional partial differential equations. Bound Value Probl 2023, 6 (2023). https://doi.org/10.1186/s13661-022-01689-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-022-01689-9