
Abstract
In this paper, continuous cobweb models with a generalized Caputo derivative called Caputo–Katugampola are investigated for both supply and demand functions and their perturbations. The convergence of each solution in the perturbed and unperturbed cases to a single equilibrium is proved. Moreover, some numerical experiments are provided to validate the theoretical results.
Similar content being viewed by others

1 Introduction
It is vital to utilize mathematical models to investigate various economic processes in order to make appropriate decisions. The time gap between supply and demand explains economic volatility. The mismatch between supply and demand responses, as Leontief in [26] pointed out, might be an essential component in defining market equilibrium. The market dynamics of supply and demand have been increasingly modeled in this regard. Commodity-price volatility can, in fact, offer a planning challenge for many businesses. The cobweb theorem is the name given to this phenomena, Waugh in [29]. The cobweb models, in particular [1, 17], which represent the pricing dynamics on a market for a nonstorable meal that takes a unit of time to create. In economic dynamics, the cobweb model has been proposed as a benchmark model [13, 19, 22].
The global demand for fractional calculus (FC) appears to be increasing exponentially. In the modeling of applied mathematics, physics, image processing, and engineering, FC has drawn a lot of interest due to its influential qualities in communicating the complex dynamics of nonsentimental systems [4, 5]. The traditional cobweb model with static expectations is thus a very useful tool for studying price dynamics. If supply and demand are linear, though, one of three types of occurrences can be observed: convergence to steady-state balance, series of period two, and unbounded variations. The equilibrium between supply and demand may not always be available due to the influence of many factors such as political stability, economic conditions, and tax-rate variation.
In a fluctuating market, we perceive a variation in price, quantity, or other noise, which prevents us from making investment decisions or deciding how much to supply or how many items to produce from one period to the next. Muth [22] explored efficient markets and the theory of price fluctuations using the cobweb framework. Nonlinear cobweb dynamics were studied by Gaffney et al. [4, 5]. Furthermore, some work on cobweb models including time delays has been completed. Matsumoto et al. [27] and Gori et al. [20, 21] investigated the terminal behavior and Hopf bifurcation of the cobweb model with time delays.
The integer-order calculus is troublesome for various physical systems with fractional (noninteger) derivatives in their real dynamics. Fractional-order differential equations are employed to accurately represent these systems. In heat-transfer systems, for example [16], financial systems [30], and electromagnetic systems [18], the fractional-order calculus was used to model the data. In recent years, there has been a significant increase in the use of fractional-order equations in stability theory [7, 14, 25, 28, 30], and various papers have been published in this area.
Bohner and Hatipoğlu [8] studied cobweb models involving conformable fractional derivatives. They provided the solutions as well as the sufficient conditions for the stability of the equilibrium value. Moreover, two distinct forms of discrete fractional cobweb models are shown in [10]. In [9], they expanded their findings to time scales. Chen and coworkers in [12] explored two types of Caputo fractional derivative dynamic cobweb models. In order to provide adequate conditions for the equilibrium’s stability, the researchers provided analytical responses.
In this paper, we propose a dynamic cobweb model with a Caputo–Katugampola fractional derivative of order \(\alpha \in (0,1)\), \(\rho > 0\) for the classic model and with noise perturbation. Section 2 begins with a review of the essential features of the Mittag–Leffler function and the Caputo–Katugampola operator. Sections 3 and 4 define and obtain our key results for the situations of a Caputo–Katugampola fractional derivative in the supply and demand functions, as well as their perturbations. Section 5 contains several examples to illustrate the theoretical results. Finally, in Sect. 6, some conclusions are presented.
2 Preliminaries
In this section, we review some fundamentals of the fractional calculus. Moreover, we adopt the notations of the Caputo–Katugampola fractional derivative and integral from [3, 6, 23, 24].
Definition 1
(Katugampola fractional integral)
The Katugampola fractional integral of order \(0<\alpha <1\), \(\rho >0\) of a function \(u \in L^{1}([a,b]), 0< a< b\), is defined by
where Γ is the Gamma function.
Definition 2
(Katugampola fractional derivative)
The Katugampola fractional derivative of order \(0<\alpha <1\), \(\rho >0\) of a function u on \([a,b], 0< a< b\), is defined by
Definition 3
(Caputo–Katugampola fractional derivative)
The Caputo–Katugampola fractional derivative of order \(0<\alpha <1\), \(\rho >0\) of a function u on \([a,b], 0< a< b\), is defined by
Lemma 1
If u is a constant, then the fractional derivative of u is \({}^{C}D_{a^{+}}^{\alpha ,\rho }u ( t ) =0\).
Definition 4
The Mittag–Leffler function with two parameters is defined as
where \(\alpha >0\), \(\beta >0\), \(z\in \mathbb{C}\).
When \(\beta =1\), one has \(E_{\alpha}(z)=E_{\alpha ,1}(z)\).
Lemma 2
([11])
Let h be a continuous function on J. Then, the solution of problem
is given by
Lemma 3
([15])
Let \(A\in \mathbb{R} ^{d\times d}\). Assume that the spectrum of A satisfies
Then, the following statements hold:
-
(i)
\(\lim_{t\rightarrow +\infty } \Vert E_{\alpha } ( At^{\alpha } ) \Vert _{2} =0\).
-
(ii)
\(\int _{0}^{+\infty }t^{ \alpha -1} \Vert E_{\alpha ,\alpha } ( At^{\alpha } ) \Vert _{2} \,dt<\infty \),
where \(\Vert \cdot \Vert _{2}\) is the 2-norm for a matrix.
3 Cobweb model with a Caputo–Katugampola fractional derivative in the demand function
The basic cobweb models with a Caputo–Katugampola fractional derivative in the demand function are studied in this section.
3.1 Basic Cobweb model
The basic cobweb model with a Caputo–Katugampola fractional derivative in the demand function is given in the following form
where \(0<\alpha <1\), \(\rho >0\), γ, β, \(\gamma _{1}\), \(\beta _{1}\in \mathbb{R}\), \(\beta \neq 0\), \(\beta \neq \beta _{1}\).
Theorem 1
The unique solution of (2) is given by
where \(\lambda =\frac{\beta _{1}-\beta}{\beta}\), \(r=\frac{\gamma _{1}-\gamma}{\beta}\) and \(p_{0}\in \mathbb{R}\).
Proof
It is clear from (2) that
that is,
Let \(x(t)=p(t)+\frac{r}{\lambda}\). We have
Using Lemma 2, we obtain
Hence,
where \(p_{0}=p(t_{0})\). □
Remark 1
\(p_{e}=\frac{\gamma _{1}-\gamma}{\beta -\beta _{1}}\) is the equilibrium value of the system (2).
Theorem 2
Suppose that \(\beta _{1}<\beta \). Then, the solution of (2) converges to the equilibrium value \(p_{e}\).
Proof
We have \(\beta _{1}< b\), then \(\lambda <0\). It follows from Lemma 3 that
Therefore,
□
3.2 Perturbed cobweb model
We consider the system
where h is a continuous function, \(0<\alpha <1\), \(\rho >0\), γ, β, \(\gamma _{1}\), \(\beta _{1}\in \mathbb{R}\), \(\beta \neq 0\), \(\beta \neq \beta _{1}\).
Theorem 3
The unique solution of (4) is given by
where \(\lambda = \frac{\beta _{1}-\beta}{\beta}\), \(r=\frac{\gamma _{1}-\gamma}{\beta}\) and \(p_{0}\in \mathbb{R}\).
Proof
It follows from (4) that
that is,
Let \(x(t)= p(t)+\frac{r}{\lambda}\). We have
Using Lemma 2, we obtain
Hence,
where \(p_{0}=p(t_{0})\). □
For the convergence of solutions of systems (4) to \(p_{e}\), we consider the following assumption \((H_{1})\): The function \(h(t)\) satisfies:
Remark 2
If \(\lim_{t\to +\infty}h(t)=0\), then \((H_{1})\) holds.
Indeed, suppose that \(\lim_{t\to +\infty}h(t)=0\). Let \(T>t_{0}\).
For \(t\geq T\), we have
This show that,
Theorem 4
Suppose that \(\beta _{1}<\beta \) and \((H_{1})\) holds. Then, the solution of (2) converges to the value \(p_{e}\).
4 Cobweb model with a Caputo–Katugampola fractional derivative in the supply function
In this section, the basic cobweb model with a Caputo–Katugampola fractional derivative in the supply function is investigated.
4.1 Basic cobweb model
The basic cobweb model with a Caputo–Katugampola fractional derivative in the supply function is defined as:
where \(0<\alpha <1\), \(\rho >0\), γ, β, \(\gamma _{1}\), \(\beta _{1}\), \(c \in \mathbb{R}\), \(\beta _{1}\neq 0, c\neq 0\), \(\beta \neq \beta _{1}\).
Theorem 5
The unique solution of (7) is given by
where \(\widetilde{\lambda}=\frac{\beta -\beta _{1}}{\beta _{1} c}\), \(\widetilde{r}=\frac{\gamma -\gamma _{1}}{\beta _{1} c}\) and \(p_{0}\in \mathbb{R}\).
Proof
It follows from (7) that
that is,
In the same way as Theorem 1, we obtain
where \(p_{0}=p(t_{0})\). □
Remark 3
\(p_{e}=\frac{\gamma _{1}-\gamma}{\beta -\beta _{1}}\) is the equilibrium value of the system (7).
Theorem 6
Suppose that \(\beta -\beta _{1}<\beta _{1}c\). Then, the solution of (7) converges to the equilibrium value \(p_{e}\).
4.2 Perturbed cobweb model
We consider the system
where g is a continuous function, \(0<\alpha <1\), \(\rho >0\), γ, β, \(\gamma _{1}\), \(\beta _{1}\), \(c \in \mathbb{R}\), \(\beta _{1}\neq 0, c\neq 0\), \(\beta \neq \beta _{1}\).
Theorem 7
The unique solution of (9) is given by
where \(p_{0}\in \mathbb{R}\).
Proof
It follows from (9) that
that is,
In the same way as Theorem 3, we obtain
where \(p_{0}=p(t_{0})\). □
For the convergence of solutions of systems (4) to \(p_{e}\), we consider the following assumption \((H_{2})\): The function \(g(t)\) satisfies:
Theorem 8
Suppose that \(\beta -\beta _{1}<\beta _{1} c\) and \((H_{2})\) holds. Then, the solution of (2) converges to the value \(p_{e}\).
5 Numerical results
In this section, we provide two numerical examples to demonstrate our theoretical findings.
Example 1
Consider the basic cobweb model with a Caputo–Katugampola fractional derivative in the demand function as follows:
with \(\gamma = -10, \beta = 6, \gamma _{1} = 5, \beta _{1} = 3\), and \(p_{0} = 10\). By choosing these parameters, one can deduce that
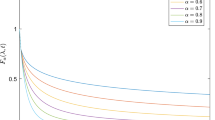
Moreover, we consider the perturbed model (4) with \(h(t) = 1/t\). Thus, all the assumptions in Theorems 2 and 4 are satisfied, hence, the solution \(p(t)\) of both models, basic and perturbed, should converge to the value \(p_{e} = 5\). By computing the equation (3) with different values of \(\alpha , \rho \), and the values of the given parameters, we can obtain the values, \(p_{m}\), for the basic model. Furthermore, we obtain the numerical solutions for the corresponding discrete models and compute the values of \(p_{a}\) and \(p_{a}^{*}\) for the basic and the perturbed model, respectively. Table 1 shows the values \(p_{m}, p_{a}\), and \(p_{a}^{*}\) with various values of \(\alpha , \rho \), and t. Figures 1 and 2 show the values of \(p(t)\) for the unperturbed and perturbed models at different values of ρ and \(\alpha =0.9\). It is obvious that by choosing a sufficiently large t, both models always convergent to the value \(p_{e} = 5\).

The values of \(p(t)\) (left) and the approximate values of \(p(t)\) (right) for Example 1 at various values of ρ and \(\alpha = 0.9\)

The approximate values of \(p(t)\) for the perturbed basic cobweb model, Example 1, at various values of ρ and \(\alpha = 0.9\)
Example 2
Consider the basic cobweb model with a Caputo–Katugampola fractional derivative in the supply function as follows:
with \(\gamma = 4, \beta = 6, \gamma _{1} = -20, \beta _{1} = 2, c=2\), and \(p_{0} = 10\). Taking these values leads to:
and
Furthermore, in the perturbed model (9) we take \(g(t) = 1/t\). It is clear that all the assumptions in Theorems 5 and 7 are fulfilled. Consequently, the solution \(p(t)\) of the perturbed and unperturbed models should converge to the value \(p_{e} = 4\). To obtain the values, \(p_{m}\), of the unperturbed model, we have solved equation (8) at different values of \(\alpha , \rho \). In addition, the values \(p_{a}\) for the corresponding unperturbed discrete model are computed. For the perturbed model, we have computed the approximate solution of \(p(t)\) and then obtained the values \(p_{a}^{*}\). Table 2 displays the values of \(p_{m}, p_{a}\), and \(p_{a}^{*}\) with different values of \(\alpha , \rho \) and t. In Figs. 3 and 4, we display the values of \(p(t)\) for the unperturbed and perturbed models at different values of ρ and \(\alpha =0.7\). It is evident that when t becomes larger both models always convergent to the point \(p_{e} = 4\).

The values of \(p(t)\) (left) and the approximate values of \(p(t)\) (right) for Example 2 at various values of ρ and \(\alpha = 0.7\)

The approximate values of \(p(t)\) for the perturbed basic cobweb model, Example 2, at various values of ρ and \(\alpha = 0.7\)
Remark 4
The numerical results were obtained using a numerical scheme based on a decomposition formula for the Caputo–Katugampola derivative. This scheme was proposed by Almeida et al. and it is used to solve such kinds of problem numerically, for more details see [2]. Furthermore, the numerical values of the Mittag–Leffler functions can be computed by using the MATLAB code known as mlf, which is available on the MathWorks website.
6 Conclusion
In this paper, we studied continuous cobweb models with the Caputo–Katugampola derivative for supply and demand functions, as well as their perturbations. It is demonstrated that in both the perturbed and unperturbed cases, each solution converges to a single equilibrium. Additionally, some numerical results are included to confirm the theoretical results. The equilibrium forms are an essential component in economic sciences, for which mathematics strives to provide theoretical equations, and this is our future goal.
Availability of data and materials
Not applicable.
References
Agliari, A., Naimzada, A., Pecora, N.: Dynamic effects of memory in a cobweb model with competing technologies. Physica A 468, 340–350 (2017)
Almeida, R., Malinowska, A.B., Odzijewicz, T.: Fractional differential equations with dependence on the Caputo–Katugampola derivative. J. Comput. Nonlinear Dyn. 11(6), 061017 (2016)
Almeida, R., Malinowska, A.B., Odzijewicz, T.: Fractional differential equations with dependence on the Caputo–Katugampola derivative. J. Comput. Nonlinear Dyn. 11, 061017 (2016)
Atangana, E., Atangana, A.: Facemasks simple but powerful weapons to protect against Covid-19 spread: can they have sides effects? Results Phys. 19, 103425 (2020)
Baleanu, D., Diethelm, K., Scalas, E., Trujillo, J.J.: Fractional Calculus: Models and Numerical Methods. World Scientific, Singapore (2012)
Baleanu, D., Wu, G.C., Zeng, S.D.: Chaos analysis and asymptotic stability of generalized Caputo fractional differential equations. Chaos Solitons Fractals 102, 99–105 (2017)
Ben Makhlouf, A., Hammami, M.A., Sioud, K.: Stability of fractional-order nonlinear systems depending on a parameter. Bull. Korean Math. Soc. 54(4), 1309–1321 (2017)
Bohner, M., Hatipoğlu, V.F.: Cobweb model with conformable fractional derivatives. Math. Methods Appl. Sci. 41, 9010–9017 (2018)
Bohner, M., Hatipoğlu, V.F.: Dynamic cobweb models with conformable fractional derivatives. Nonlinear Anal. Hybrid Syst. 32, 157–167 (2019)
Bohner, M., Jonnalagadda, J.M.: Discrete fractional cobweb models. Chaos Solitons Fractals 162, 112451 (2022)
Boucenna, D., Ben Makhlouf, A., Naifar, O., Guezane-Lakoud, A., Hammami, M.A.: Linearized stability analysis of Caputo–Katugampola fractional-order nonlinear systems. J. Nonlinear Funct. Anal. 2018, 1–11 (2018)
Chen, C., Bohner, M., Jia, B.: Caputo fractional continuous cobweb models. J. Comput. Appl. Math. 374(15), 112734 (2020)
Chiarella, C.: The cobweb model: its instability and the onset of chaos. Econ. Model. 5, 377–384 (1988)
Cong, N.D., Doan, T.S., Siegmund, S., Tuan, H.T.: Linearized asymptotic stability for fractional differential equations. Electron. J. Qual. Theory Differ. Equ. 2016, 39 (2016)
Cong, N.D., Doan, T.S., Tuan, H.T.: Asymptotic stability of linear fractional systems with constant coefficients and small time dependent perturbations. Vietnam J. Math. 46, 665–680 (2018)
Dadras, S., Momeni, H.R.: A new fractional-order observer design for fractional-order nonlinear systems. In: Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering ASME 2011, pp. 403–408 (2011)
Dieci, R., Westerhoff, F.: Stability analysis of a cobweb model with market interactions. Appl. Math. Comput. 215, 2011–2023 (2009)
Engheta, N.: On fractional calculus and fractional multipoles in electromagnetism. IEEE Trans. Antennas Propag. 44(4), 554–566 (1996)
Gandolfo, G.: Economic Dynamics, Economic Dynamics, 4th edn. Springer, Heidelberg (2009)
Gori, L., Guerrini, L., Sodini, M.: Hopf bifurcation in a cobweb model with discrete time delays. Discrete Dyn. Nat. Soc. 2014, 137090 (2014)
Gori, L., Guerrini, L., Sodini, M.: Hopf bifurcation and stability crossing curves in a cobweb model with heterogeneous producers and time delays. Nonlinear Anal. Hybrid Syst. 18, 117–133 (2015)
Hommes, C.H.: Dynamics of the cobweb model with adaptive expectations and nonlinear supply and demand. J. Econ. Behav. Organ. 24, 315–335 (1994)
Katugampola, U.N.: New approach to a generalized fractional integral. Appl. Math. Comput. 218, 860–865 (2011)
Katugampola, U.N.: Existence and uniqueness results for a class of generalized fractional differential equations. Preprint, arXiv:1411.5229
Kumar, S., Kumar, A., Odibat, Z.M.: A nonlinear fractional model to describe the population dynamics of two interacting species. Math. Methods Appl. Sci. 40(11), 4134–4148 (2017)
Leontief, W.: Essays in Economics: Theories and Theorizing. OUP, Oxford (1966)
Matsumoto, A., Szidarovszky, F.: The asymptotic behavior in a nonlinear cobweb model with time delays. Discrete Dyn. Nat. Soc. 2015, Article ID 312574 (2015)
Naifar, O., Ben Makhlouf, A., Hammami, M.A.: Comments on “Mittag-Leffler stability of fractional-order nonlinear dynamic systems [Automatica 45(8) (2009) 1965–1969]. Automatica 75, 329 (2017)
Waugh, F.V.: Cobweb models. Am. J. Agric. Econ. 46(4), 732–750 (1964)
Zhao, Y.: Research and development of economic crisis data simulation teaching analysis system based on fractional calculus equation. Chaos Solitons Fractals 130, 109460 (2020)
Acknowledgements
Not applicable.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
This work was carried out as a collaboration between the three authors. A. M. Nagy, S. Assidi and A. Ben Makhlouf wrote and reviewed the main manuscript text. Moreover, A. M. Nagy designed the software and simulations.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Nagy, A.M., Assidi, S. & Makhlouf, A.B. Convergence of solutions for perturbed and unperturbed cobweb models with generalized Caputo derivative. Bound Value Probl 2022, 89 (2022). https://doi.org/10.1186/s13661-022-01671-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-022-01671-5