
Abstract
The Riemann problem for a one-dimensional nonlinear wave system with different gamma laws is considered. By the properties of wave curves, we observe that this system does not contain the composite wave compared to the barotropic models of gas dynamics with different pressure laws. Under some initial value data, the Riemann solution is constructed. Using the interaction of the elementary waves, we consider the generalized Riemann problem and discover that the Riemann solution is stable for such perturbation of the initial data.
Similar content being viewed by others

1 Introduction
One-dimensional nonlinear wave system with the variable gamma laws which only depends on the spatial coordination is described as follows:
where
and \(\gamma(x)>1\) and \(A>0\). When \(\gamma(x)=\gamma\) is constant, system (1.1) is changed into a one-dimensional nonlinear wave system, which can be obtained either by starting with the isentropic gas dynamics equations and neglecting the quadratic terms in the velocity or by writing the nonlinear wave equation as a first-order system [1, 2]. System (1.1) can also be deduced from the barotropic models of gas dynamics with different pressure laws in [3], and we refer the reader to this paper for details. Introducing \(m=\rho u\), system (1.1) becomes
which is similar to the model of a mixture of gases governed by different gamma laws in [4, 5]. In the two papers, they used the front tracking algorithm and the Glimm scheme to prove that the Cauchy problem has a global, weak solution under some conditions, respectively. We also see the results for the model of an inviscid fluid capable of undergoing phase transitions, which is a simplified version of the model proposed by Fan [6]. For the related results, we can see [7–13].
In this paper, we focus on the Riemann problem for system (1.3) with piecewise constant initial data
and the interaction between the elementary waves and the stationary contact wave. We observe that the corresponding Riemann solution is similar to that of the model of one-dimensional adiabatic flow in Lagrangian coordinates, we also see the related results [14–21] for details.
The organization of this paper is as follows. In Section 2, we describe the properties of wave curves and construct the Riemann solution. In Section 3, we consider the initial value problem with three constant states. By the interaction between the stationary contact wave and the shock wave or rarefaction wave, the global solutions are constructed. Moreover, we obtain that the solution of the perturbed initial value problem converges to the corresponding Riemann solution as ε approaches zero, which shows the stability of the Riemann solution for the small perturbation.
2 The solution to the Riemann problem
Setting the dependent variable \(U=(\rho,m,\gamma)\), the Jacobian matrix of system (1.3) is in the form
which has three eigenvalues
together with the corresponding eigenvectors
The first and the third families are genuinely nonlinear, and the second family is linearly degenerate.
In order to analyze the solutions to system (1.3), we need to look at the wave curves.
2.1 Wave curves
Since Eqs. (1.3) and the Riemann data are invariant under uniform stretching of coordinates
By taking the self-similar transform \(\xi=x/t\), the Riemann problem is reduced to the boundary value problem of the ordinary differential equation
with \((\rho,m,\gamma)(\infty)=(\rho_{r},m_{r},\gamma_{r})\) and \((\rho,m,\gamma)(-\infty)=(\rho_{l},m_{l},\gamma_{l})\).
For smooth solutions, Eqs. (2.4) can be rewritten as
It follows from (2.5) that besides the constant solution (\(\rho>0\)), it provides a rarefaction wave which is a continuous solution of (2.5) in the form \(U(\xi)\). Given a left state \(U_{\ell}=(\rho_{\ell},m_{\ell},\gamma_{\ell})\), the rarefaction wave curves are the set of all right states \(U=(\rho,m,\gamma_{l})\) that can be connected to the left by a rarefaction wave in the first family, and they are as follows:
Similarly, for a given right state \(U_{r}=(\rho_{r},m_{r},\gamma_{r})\), the rarefaction wave curve which is the sets of states \(U=(\rho,m,\gamma_{r})\) that can be connected on the right in the third family is described as follows:
For a bounded discontinuous solutions, the Rankine-Hugoniot condition holds:
where, and in what follows, we use the notation \([h]=h_{+}-h_{-}\) with \(h_{-}=h(x(t)-0,t)\) and \(h_{+}=h(x(t)+0,t)\), and \(\sigma=\frac{dx}{dt}\) is the velocity of the discontinuity. It follows from the third equation of (2.8) that
Under the condition \([\gamma]=0\) and the Lax shock inequalities, the possible state \(U=(\rho,m,\gamma_{l})\) can be connected to the left state \(U_{l}\) on the right by a one-shock wave given by
with the shock velocity
Similarly, for a given right state \(U_{r}=(\rho_{r},m_{r},\gamma_{r})\), we can obtain that the possible state \(U=(\rho,m,\gamma_{r})\) can be connected to the right state \(U_{r}\) on the left by a three-shock wave given as follows:
with the shock velocity
The second family is linearly degenerate, that is, \(\sigma=0\), which implies that it is a stationary contact wave. From system (1.3), it satisfies
The curve which is the sets of states \(U_{+}=(\rho_{+},m_{+},\gamma_{r})\) that can be connected to \(U_{-}=(\rho_{-},m_{-},\gamma_{l})\) by the stationary contact wave is
Remark 1
As a consequence, the \(\gamma(x)\) remains constant across a rarefaction wave or a shock wave and only changes along the contact wave. In addition, the shock speed σ does not vanish, i.e., there is not a stationary shock. So system (1.3) does not contain the curves of composite waves [22–25].
2.2 The properties of the elementary waves
To solve (1.3) and (1.4), we project all the wave curves on the \((\rho,m)\)-plane. Now, let us investigate the properties of the wave curves.
Lemma 2.1
The curve \(R_{1}(U_{l},U)\) is monotonic decreasing and concave, while \(R_{3}(U_{r},U)\) is monotonic increasing and convex.
Proof
By (2.6), the curve \(R_{1}(U,U_{l})\) can be rewritten as
Differentiating the above equation with respect to ρ gives
for \(\gamma_{l}>1\). So, the curve \(R_{1}(U_{l},U)\) is monotonic decreasing and concave. Similarly, we can prove that \(R_{3}(U_{r},U)\) is monotonic increasing and convex. □
Lemma 2.2
The curve \(S_{1}(U_{l},U)\) is monotonic decreasing and concave, while \(S_{3}(U,U_{r})\) is monotonic increasing and convex.
Proof
Here, we only prove the result for the case \(S_{1}(U_{l},U)\), and the other case can be studied in a similar method.
We obtain from (2.10) that
Differentiating the above equation with respect to ρ reduces to
where we use the fact that \(\rho>\rho_{l}\) for \(S_{1}(U_{l},U)\). Furthermore, we have
Next, let us consider the term
which gives
Using (1.2), we have
for \(\gamma>1\) and \(\rho>\rho_{l}\). According to \(f(\rho_{l})=0\), we have \(f(\rho)>0\) for \(\rho>\rho_{l}\). So, it is clear from (2.18) that
Combining (2.17) and (2.20) gives that the curve \(S_{1}(U_{l},U)\) is monotonic decreasing and concave.
Similar arguments lead to the result that \(S_{3}(U_{r},U)\) is monotonic increasing and convex.
Therefore, we complete the proof. □
Let the one-rarefaction wave \(R_{1}(U,U_{0})\) and the one-shock wave \(S_{1}(U,U_{0})\) (or the three-rarefaction wave \(R_{3}(U,U_{0})\) and the three-shock wave \(S_{3}(U,U_{0})\)) pass through the point \(P_{0}=(\rho_{0},m_{0},\gamma_{l})\) respectively, we have the following lemma.
Lemma 2.3
The curves \(R_{1}(U,U_{0})\) (\(R_{3}(U,U_{0})\)) contact with \(S_{1}(U,U_{0})\) (\(S_{3}(U,U_{0})\)) at point \(P_{0}\) up to the second order, respectively.
Proof
It follows from (2.17) that
Similarly, we obtain from (2.18) that
Combining (2.21) and (2.22), we know that the curve \(R_{1}(U,U_{0})\) contacts with \(S_{1}(U,U_{0})\) at point \(P_{0}\) up to the second order.
Similar calculations show that the other result of the lemma is true. So, the proof is completed. □
2.3 The Riemann solution
In this paper, we only consider the case \(\gamma_{l}>\gamma_{r}\) and can obtain the corresponding results for the other case \(\gamma_{l}<\gamma_{r}\) in a similar way. For simplicity, we take \(A=1\) in (1.2).
Given the left state \(U_{l}=(\rho_{l},m_{l},\gamma_{l})\) and the right state \(U_{r}=(\rho_{r},m_{r},\gamma_{r})\), we consider the projection of the wave curves in the \((\rho,m)\)-plane. Let \(U_{-}=(\rho _{-},m_{-},\gamma_{l})\) and \(U_{+}=(\rho_{+},m_{+},\gamma_{r})\) satisfy that \(U_{-}\in R_{1}(U_{l},U)\) or \(S_{1}(U_{l},U)\), \(U_{+}\in R_{3}(U_{r},U)\) or \(S_{r}(U_{r},U)\) and Eq. (2.15). Denote \(w_{l}=m_{l}+\frac{2\sqrt{\gamma_{l}}}{1+\gamma_{l}}\rho_{l}^{\frac {1+\gamma_{l}}{2}}\) and \(z_{r}=m_{r}-\frac{2\sqrt{\gamma_{r}}}{1+\gamma_{r}}\rho_{r}^{\frac {1+\gamma_{r}}{2}}\).
We assume \(\rho_{-}>1\) and describe the Riemann solution \(\mathit{RP}(U_{l},U_{r})\) as the following five cases (for the other case \(\rho_{-}<1\), one easily obtains similar results).
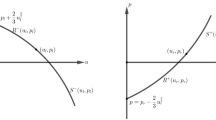
Case 1. \(w_{l}>z_{r}\) and \(m_{l}< z_{r}\), the \(\mathit{RP}(U_{l},U_{r})\) is \(U_{l}+R_{1}+U_{-}+J_{2}+U_{+}+R_{3}+U_{r}\), where \(U_{\pm}\) satisfies
In addition, \(R_{1}(U,U_{l})\) is determined by (2.6), where \(\rho _{-}\leq\rho\leq\rho_{l}\) and \(R_{3}(U,U_{r})\) is determined by (2.7), where \(\rho_{+}\leq\rho \leq\rho_{r}\). In order to show the Riemann solution, we only need to prove that (2.23) has a unique solution. Setting \(\rho_{-}=\rho\), it follows from the first two equations of (2.23) that
We have \(f'(\rho)>0\), which implies that the function \(f(\rho)\) is increasing with respect to the variable ρ. It is obvious that \(f(0)=-(w_{l}-z_{r})<0\) and
In view of the properties of the function \(f(\rho)\), we conclude that Eq. (2.24) has a unique solution. \(\mathit{RP}(U_{l},U_{r})\) is shown in Figure 1.

Case 1: \(\pmb{\mathit{RP}(U_{l},U_{r})=U_{l}+R_{1}+U_{-}+J_{2}+U_{+}+R_{3}+U_{r}}\) .
In the following cases, we can obtain the uniqueness of the corresponding Riemann solution and omit the details.
Case 2. \(z_{r}< m_{l}< m_{r}\) and \(w_{l}< m_{r}\). By virtue of (2.7) and (2.10), we have
\(\mathit{RP}(U_{l},U_{r})\) is \(U_{l}+S_{1}+U_{-}+J_{2}+U_{+}+R_{3}+U_{r}\) and see Figure 2. It is clear that \(S_{1}=S_{1}(U_{-},U_{l})\) is demonstrated by (2.10) and \(R_{3}(U,U_{r})\) is determined by (2.7) \(\rho_{+}\leq\rho\leq\rho_{r}\).

Case 2: \(\pmb{\mathit{RP}(U_{l},U_{r})=U_{l}+S_{1}+U_{-}+J_{2}+U_{+}+R_{3}}\) .
Case 3. \(w_{l}>m_{r}\) and \(m_{l}< m_{r}\), \(\mathit{RP}(U_{l},U_{r})\) is \(U_{l}+R_{1}+U_{-}+J_{2}+U_{+}+S_{3}+U_{r}\), where \(U_{\pm}\) are determined by
which is shown in Figure 3. For \(R_{1}(U,U_{l})\), we can see Case 1, and \(S_{3}=S_{3}(U_{+},U_{r})\) is shown by (2.12).

Case 3: \(\pmb{\mathit{RP}(U_{l},U_{r})=U_{l}+R_{1}+U_{-}+J_{2}+U_{+}+S_{3}+U_{r}}\) .
Case 4. \(m_{l}>m_{r}\). Combining (2.10) and (2.12) with (2.15), we obtain
The corresponding Riemann solution \(\mathit{RP}(U_{l},U_{r})\) is \(U_{l}+S_{1}+U_{-}+J_{2}+U_{+}+S_{3}+U_{r}\), which is shown in Figure 4. Similarly, we also obtain \(S_{1}=S_{1}(U_{l},U_{-})\) and \(S_{3}=S_{3}(U_{+},U_{r})\).

Case 4: \(\pmb{\mathit{RP}(U_{l},U_{r})=U_{l}+S_{1}+U_{-}+J_{2}+U_{+}+S_{3}}\) .
Case 5. \(w_{l}< z_{r}\), we get that \(R_{1}(U,U_{l})\) does not intersect \(R_{3}(U,U_{r})\) in the region \(\rho>0\). So \(\mathit{RP}(U_{l},U_{r})\) is \(R_{1}+U_{0}+R_{3}\), where the state \(U_{0}\) represents the vacuum, that is, \(\rho_{0}=0\) at \(x=0\), see Figure 5. \(R_{1}=R_{1}(U_{l},U_{0})\) and \(R_{3}=R_{3}(U_{0},U_{r})\) can be constructed by Case 1, where \(\rho_{-}=\rho_{+}=0\).

Case 5: \(\pmb{\mathit{RP}(U_{l},U_{r})=U_{l}+R_{1}+Vac+R_{3}+U_{r}}\) .
Remark 2
We have demonstrated the corresponding Riemann solutions for the case \(\rho_{-}>1\). For the case \(0<\rho_{-}<1\), we note \(\rho_{-}>\rho_{+}\) for \(\gamma_{l}>\gamma_{r}\) and easily obtain the Riemann solutions by similar methods.
We have constructed the Riemann solutions for all the cases and have the following theorem.
Theorem 2.1
There exists a unique solution for Riemann problem (1.3) and (1.4).
3 Interaction between the stationary contact wave and the elementary waves
In this section, we only consider the interaction of the stationary contact wave with the rarefaction wave or the shock wave. As for the interaction between the rarefaction wave and the shock wave, we may see [14, 21] or other related results. Since the speed of one-wave (\(R_{1}\) or \(S_{1}\)) is less than zero and that of three-wave (\(R_{3}\) or \(S_{3}\)) is greater than zero, the interaction of the stationary contact wave with the shock or the rarefaction wave may be divided into four cases:
\(J_{2}+S_{1}\), \(J_{2}+R_{1}\), \(S_{3}+J_{2}\), \(R_{3}+J_{2}\).
Case 1. The collision of \(J_{2}\) and \(S_{1}\).
We give the corresponding initial value with three-piece constant states as follows:
where ε is a small positive number.
Assume that there are a stationary contact wave \(J_{2}(U_{l},U_{0})\) and a one-shock wave \(S_{1}(U_{0},U_{r})\), as shown in Figure 6, where \((l)=U_{l}=(\rho_{l},m_{l},\gamma_{l})\), \((0)=U_{0}=(\rho_{0},m_{0},\gamma_{r})\) and \((r)=U_{r}=(\rho_{r},m_{r},\gamma_{r})\).

Case 1: \(\pmb{J_{2}+S_{1}}\) ( \(\pmb{\rho_{-}>1}\) ).
First, we consider the subcase \(\rho_{-}>1\), see Figure 6. It is clear that when \(J_{2}\) collides with \(S_{1}\) at some point, the new Riemann problem is formed. We claim that the corresponding Riemann solution \(\mathit{RP}(U_{l},U_{r})\) is \(U_{l}+S_{1}(U_{l},U_{-})+U_{-}+J_{2}(U_{-},U_{+})+U_{+}+S_{3}(U_{+},U_{r})+U_{r}\) and is not \(U_{l}+S_{1}(U_{l},U_{l'})+J_{2}(U_{l'},U_{r'})+R_{3}(U_{r'},U_{r})+U_{r}\).
In order to obtain the above statement, let us claim that \(\rho_{+}>\rho_{0'}\), where \(U_{0'}\in S_{1}(U_{0},U)\) and \(m_{-}=m_{0'}=m_{+}\). The reason is as follows.
We note that
Setting \(\Delta\rho=\rho_{-}-\rho_{l}>0\), \(\Delta\hat{\rho}=\rho_{+}-\rho_{0}>0\) and \(\Delta\widetilde{\rho}=\rho_{0'}-\rho_{0}>0\), by the first equality of (3.2), we have
which gives
Note \(\gamma_{l}>\gamma_{r}\), if \(\rho_{l}>1\), and we have
So, we get
We obtain from (3.2) that
which gives
If \(p_{0'}\geq p_{+}\), that is, \(\rho_{0'}\geq\rho_{+}\), it implies
Combining (3.2) and (3.4), we get \(\Delta\hat{\rho}>\Delta\widetilde{\rho}\), which is contradiction to \(p_{0'}\geq p_{+}\). So, we have \(p_{0'}< p_{+}\), which implies the claim.
If \(\rho_{l}<1\), we have \(\rho_{0}<1\) and also obtain similar results.
For the subcase \(\rho_{-}<1\), we can obtain similar results and omit the details here. In the following cases, we only consider the subcase \(\rho_{-}>1\).
Furthermore, we observe that as \(\varepsilon\rightarrow0\), the limit of the solution of (1.3) and (3.1) is the corresponding Riemann solution of (1.3) and (1.4).
Case 2. The collision of \(J_{2}\) and \(R_{1}\).
Suppose that there are a stationary contact wave \(J_{2}(U_{l},U_{0})\) and a one-rarefaction wave \(R_{1}(U_{0},U_{r})\), as shown in Figure 7. For the initial value problem, we may see (3.1) in the case. Similarly, when \(J_{2}\) collides with \(R_{1}\) at some point, the new Riemann problem is formed. We draw a one-rarefaction wave \(R_{1}(U_{l},U_{-})\) from \(U_{l}\) to \(U_{-}\) and a three-rarefaction wave \(R_{3}(U_{+},U_{r})\) from \(U_{r}\) to \(U_{+}\). Here \(U_{\pm}\) satisfies that \(m_{-}=m_{+}\) and \(m_{l}< m_{\pm}< m_{r}\). Then the new Riemann solution is \(U_{l}+R_{1}(U_{l},U_{-})+U_{-}+J_{2}(U_{-},U_{+})+U_{+}+R_{3}(U_{+},U_{r})+U_{r}\).

Case 2: \(\pmb{J_{2}+R_{1}}\) ( \(\pmb{\rho_{-}>1}\) ).
Next, we prove that the Riemann solution is not \(U_{l}+R_{1}(U_{l'},U_{l})+J_{2}(U_{l'},U_{r'})+ S_{3}(U_{r'},U_{r})+U_{r}\), see Figure 7. To prove the result, we only need to show that \(\rho_{+}<\rho_{0'}\), where \(U_{0'}\in R_{1}(U_{0},U_{r})\) and \(m_{-}=m_{+}=m_{0'}\). Then we have
We can obtain from the first equation of (3.5)
Together with the last three equalities of (3.5), we have
By the fact that
for \(\gamma_{l}>\gamma_{r}>1\), we obtain from (3.6) that
which implies
Thus, the result is verified.
Moreover, it is clear that as \(\varepsilon\rightarrow0\), the solution of the initial value problem transforms into \(\mathit{RP}(U_{l},U_{r})\).
Case 3. The collision of \(S_{3}\) and \(J_{2}\).
To discuss the interaction between \(S_{3}\) and \(J_{2}\), we consider the initial value problem with three-piece constant states
where \((l)=U_{l}=(\rho_{l},m_{l},\gamma_{l})\), \((0)=U_{0}=(\rho_{0},m_{0},\gamma_{l})\), \(U_{r}=(\rho_{r},m_{r},\gamma_{r})\) and \(\varepsilon>0\).
Assume that there are a three-shock wave \(S_{3}(U_{l},U_{0})\) and a stationary contact wave \(J_{2}(U_{0},U_{r})\), and they collide with each other at a finite time, as shown in Figure 8. Meanwhile, a new Riemann problem is formed, the corresponding Riemann solution is denoted by \(\mathit{RP}(U_{l},U_{r})\). We draw a one-rarefaction wave \(R_{1}(U_{l},U_{-})\) from \(U_{l}\) to \(U_{-}\) and a three-shock wave \(S_{3}(U_{+},U_{r})\) from \(U_{r}\) to \(U_{+}\). Here \(U_{\pm}\) satisfies that \(m_{-}=m_{+}\), \(m_{\pm}>m_{l}\) and \(m_{\pm}>m_{r}\). Then the new Riemann solution \(\mathit{RP}(U_{l},U_{r})\) is \(U_{l}+R_{1}(U_{-},U_{l})+U_{-}+J_{2}(U_{-},U_{+})+U_{+}+S_{3}(U_{+},U_{r})+U_{r}\).

Case 3: \(\pmb{S_{3}+J_{2}}\) ( \(\pmb{\rho_{-}>1}\) ).
If \(\rho_{-}>1\), which indicates \(\rho_{+}>1\), we have \(\rho_{r}>1\), which implies \(\rho_{0}>1\). If \(\rho_{-}<1\), we have \(\rho_{+}<1\), which implies \(\rho_{r}<1\).
For this subcase \(\rho_{-}>1\), we claim that the Riemann solution is not \(U_{l}+S_{1}(U_{l'},U_{l})+J_{2}(U_{l'},U_{r'})+S_{3}(U_{r'},U_{r})+U_{r}\), see Figure 8. To prove the result, it is sufficient to show that \(\rho_{\overline{l}}>\rho_{n}\), where \(U_{n}\in S_{3}(U_{+},U_{r})\), \(U_{\overline{l}}\in J_{2}(U_{l},U)\) and \(m_{\overline{l}}=m_{l}=m_{n}\). So, we have
It is clear from (3.8) that
If \(\rho_{\overline{l}}\leq\rho_{n}\), then \(p_{l}=p_{\overline{l}}\leq p_{n}\), which implies \(\rho_{l}-\rho_{0}>\rho_{n}-\rho_{r}\). Setting \(\Delta\rho=\rho_{l}-\rho_{0}\) and \(\Delta\widetilde{\rho}=\rho_{n}-\rho_{r}\), we have \(\Delta\rho>\Delta\widetilde{\rho}\). From the first equality of (3.11), we get
which implies \(\rho_{\overline{l}}>\rho_{n}\) and \(\rho_{0}>1\). This is not true. So, we prove the above statement.
As \(\varepsilon\rightarrow0\), the solution of the initial value problem reduces to \(\mathit{RP}(U_{l},U_{r})\).
Case 4. The collision of \(R_{3}\) and \(J_{2}\).
Suppose the initial value described as (3.7), there are a three-shock wave \(R_{3}(U_{l},U_{0})\) and a stationary contact wave \(J_{2}(U_{0},U_{r})\), and they collide with each other at a finite time, as shown in Figure 9. Then a new Riemann problem is formed. In order to clarify the construction of the corresponding Riemann solution \(\mathit{RP}(U_{l},U_{r})\), we show \(\rho_{\overline{l}}<\rho_{n}\), where \(U_{n}\in R_{3}(U_{+},U_{r})\), \(U_{\overline{l}}\in J_{2}(U,U_{l})\) and \(m_{\overline{l}}=m_{l}=m_{n}\). In fact, we have
We obtain from (3.10) that
If \(\rho_{\overline{l}}\geq\rho_{n}\), then \(p_{l}=p_{\overline{l}}\geq p_{n}\). Setting \(\Delta\rho=\rho_{0}-\rho_{l}\) and \(\Delta\widetilde{\rho}=\rho_{r}-\rho_{n}\), we have \(\Delta\rho\geq\Delta\widetilde{\rho}\). From the first equality of (3.10), we get
which implies \(\rho_{\overline{l}}<\rho_{n}\) for \(\gamma_{l}>\gamma_{r}\). This is contradiction to the assumption. Then we prove the above statement.

\(\pmb{R_{3}+J_{2}}\) ( \(\pmb{\rho_{-}>1}\) ).
Now, we draw a one-shock wave \(S_{1}(U_{-},U_{l})\) from the state \(U_{l}\) and a three-rarefaction wave \(R_{3}(U_{+},U_{r})\) from the state \(U_{r}\). Here \(U_{\pm}\) satisfies that \(m_{-}=m_{+}\), \(m_{\pm}< m_{l}\) and \(m_{\pm}< m_{r}\). Then the Riemann solution \(\mathit{RP}(U_{l},U_{r})\) is \(U_{l}+S_{1}(U_{-},U_{l})+U_{-}+J_{2}(U_{-},U_{+})+U_{+}+R_{3}(U_{+},U_{r})+U_{r}\), see Figure 9.
In addition, it is not difficult to find that \(\mathit{RP}(U_{l},U_{r})\) is the limit of the solution of the initial value problem.
So far, we have discussed the interactions of the contact wave with the rarefaction wave or the shock wave and have constructed the solutions for the initial value problem (1.3) and (3.1) or (3.7). Therefore, we obtain the following theorem.
Theorem 3.1
There exists a unique solution to the perturbed initial value problem (1.3) and (3.1) or (3.7). The limit of the perturbed Riemann solution of (1.3) and (3.1) or (3.7) is exactly the corresponding Riemann solution of (1.3) and (1.4). The Riemann solution of (1.3) and (1.4) is stable with respect to such small perturbations of the initial data.
4 Concluding remarks
In this paper, we present the Riemann problem and the interactions of the stationary contact discontinuity with the elementary waves. We discover the stability of the generalized Riemann problem, but do not observe the composite wave, which motivates us to consider the related problems including the coupling of two different hyperbolic systems.
References
C̆anié, S, Keyfitz, BL, Kim, EH: Mixed hyperbolic-elliptic systems in self-similar flows. Bol. Soc. Bras. Mat. 32, 1-23 (2002)
C̆anié, S, Keyfitz, BL, Kim, EH: Free boundary problems for nonlinear wave systems: mach stems for interacting shocks. SIAM J. Math. Anal. 37, 1947-1977 (2006)
Ambroso, A, Chalons, C, Coquel, F, Godlewski, E, Lagoutière, F, Raviart, PA, Seguin, N: A relaxation method for the coupling of systems of conservation laws. In: Hyperbolic Problems: Theory, Numerics, Applications, pp. 947-954 (2008)
Holden, H, Risebro, NH, Sande, H: Front tracking for a model of immiscible gas flow with large data. BIT Numer. Math. 50, 331-376 (2010)
Holden, H, Risebro, NH, Sande, H: The solution of the Cauchy problem with large data for a model of a mixture of gases. J. Hyperbolic Differ. Equ. 6, 25-106 (2009)
Fan, H: On a model of the dynamics of liquid/vapor phase transitions. SIAM J. Appl. Math. 60, 1270-1301 (2000)
Peng, YJ: Solutions faibles globales pour l’équation d’Euler d’un fluide compressible avec de grandes données initiales. Commun. Partial Differ. Equ. 17, 161-187 (1992)
Peng, YJ: Solutions faibles globales pour un modele d’écoulements diphasiques. Ann. Sc. Norm. Super. Pisa, Cl. Sci. 21, 523-540 (1994)
Corli, A, Fan, H: The Riemann problem for reversible reactive flows with metastability. SIAM J. Appl. Math. 65, 426-457 (2004)
Evje, S, Karlsen, KH: Global existence of weak solutions for a viscous two-phase model. J. Differ. Equ. 245, 2660-2703 (2008)
Hirosawa, F: Generalised energy conservation law for wave equations with variable propagation speed. J. Math. Anal. Appl. 358, 56-74 (2009)
Bhattarai, S: Stability of solitary-wave solutions of coupled NLS equations with power-type nonlinearities. Adv. Nonlinear Anal. 4, 73-90 (2015)
Kumar, S, Kumar, D, Singh, J: Fractional modelling arising in unidirectional propagation of long waves in dispersive media. Adv. Nonlinear Anal. 5, 383-394 (2016)
Chang, T, Hsiao, L: The Riemann Problem and Interaction of Waves in Gas Dynamics. Pitman Monogr. Surv. Pure Appl. Math., vol. 41. Longman, Harlow (1989)
Smoller, J: Shock Waves and Reaction-Diffusion Equations, 2nd edn. Springer, New York (1994)
Li, JQ, Zhang, T, Yang, SL: The Two-Dimensional Riemann Problem in Gas Dynamics. Longman, New York (1998)
Serre, D: Systems of Conservation Laws, vol. 1. Cambridge University Press, Cambridge (1999)
Serre, D: Systems of Conservation Laws, vol. 2. Cambridge University Press, Cambridge (2000)
Lu, Y: Hyperbolic Conservation Laws and the Compensated Compactness Method. Chapman & Hall/CRC, Boca Raton (2003)
Nishihara, K, Nishikawa, M: Asymptotic behavior of solutions to the system of compressible adiabatic flow through porous media. SIAM J. Math. Anal. 33, 216-239 (2001)
Liu, Y, Sun, W: Riemann problem and wave interactions in magnetogasdynamics. J. Math. Anal. Appl. 397, 454-466 (2013)
LeFloch, PG, Thanh, MD: A Godunov-type method for the shallow water equations with discontinuous topography in the resonant regime. J. Comput. Phys. 230, 7631-7660 (2011)
Han, E, Hantkee, M, Warnecke, G: Exact Riemann solutions to compressible Euler equations in ducts with discontinuous cross-section. J. Hyperbolic Differ. Equ. 9, 1-47 (2012)
Isaacson, E, Temple, B: Convergence of the 2×2 Godunov method for a general resonant nonlinear balance law. SIAM J. Appl. Math. 55, 625-640 (1995)
Goatin, P, LeFloch, PG: The Riemann problem for a class of resonant hyperbolic systems of balance laws. Ann. Inst. Henri Poincaré, Anal. Non Linéaire 21, 881-902 (2004)
Acknowledgements
The authors would like to thank the anonymous referees who provided valuable comments and suggestions resulting in improvements in this manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Funding
The work is partially supported by the Anhui Provincial Natural Science Foundation of China (1508085MA08).
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors carried out the proofs and the authors conceived of the study. All authors read and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Wang, G., Liu, JB. & Zhao, L. The Riemann problem for a one-dimensional nonlinear wave system with different gamma laws. Bound Value Probl 2017, 107 (2017). https://doi.org/10.1186/s13661-017-0837-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-017-0837-2