
Abstract
We devise an iterative algorithm incorporating inertial techniques to approximate the shared solution of a generalized equilibrium problem, a fixed point problem for a finite family of relatively nonexpansive multivalued mappings, and a variational inequality problem. Our discussion encompasses the strong convergence of the proposed algorithm and highlights specific outcomes derived from our theorem. Additionally, we provide a computational analysis to underscore the significance of our findings and draw comparisons. The results presented in this paper serve to extend and unify numerous previously established outcomes in this particular research domain.
Similar content being viewed by others

1 Introduction
Consider a real Banach space E with dual \(E^{*}\), and let D be a nonempty closed convex subset of E. The normalized duality mapping \(\mathbb{J}:E \to 2^{E^{*}}\) is defined by \(\mathbb{J}(\mathfrak{w})=\{\mathfrak{w}_{0}\in E^{*}: \langle \mathfrak{w}_{0},\mathfrak{w}\rangle =\|\mathfrak{w}\|^{2}=\| \mathfrak{w}_{0}\|^{2}\}\) for all \(\mathfrak{w}\in E\). The fixed point of a multivalued mapping \(\mathbb{S}:D\to 2^{D}\), where \(2^{D}\) denotes the power set of D, is a point \(\mathfrak{w} \in D\) such that \(\mathfrak{w} \in \mathbb{S}\mathfrak{w}\).
Consider bifunctions ε and \(\mathbb{G}\) defined on \(D\times D\to \mathbb{R}\). The generalized equilibrium problem (GEP) seeks a solution \(\mathfrak{w}_{0}\in D\) satisfying the inequality
The solution to this problem is denoted as \({\mathrm{Sol(GEP)}}\). When ε is identically zero, GEP(1.1) reduces to the equilibrium problem (EP)
The EP (1.2) has been studied by Blum and Oettli [5], and its solution is denoted as Sol(EP).
If we set \(\mathbb{G}(\mathfrak{w}_{0},\mathfrak{v})=\langle \mathfrak{h} \mathfrak{w}_{0}, \mathfrak{v}-\mathfrak{w}_{0}\rangle \), where \(\mathfrak{h}:D\to D\) is a nonlinear mapping, then GEP(1.1) transforms into the variational inequality problem (VIP)
introduced by Hartmann and Stampacchia [12]. The solution of (1.3) is denoted as Sol(VIP). The generalized equilibrium problem plays a pivotal role in various scientific and engineering domains, providing a natural and unified framework for problems in nonlinear analysis, optimization, economics, finance, game theory, physics, and engineering; see [1, 27, 29].
In 1973, Markin [19] introduced the fixed point problem (FPP) for multivalued nonexpansive mappings, which has found extensive applications in various fields such as convex optimization and control theory, as illustrated in [11, 16, 20, 26]. In 2011, Homaeipour et al. [13] presented an iterative algorithm involving relatively nonexpansive multivalued mapping \(\mathbb{S}\):
Under certain conditions on the control sequence, Homaeipour et al. observed the convergence of the sequence \(\{\mathfrak{w}_{n}\}\). More recently, Zegeye et al. [32] investigated an iterative method to approximate the common solution of the equilibrium problem (EP) and the fixed point problem (FPP) for relatively nonexpansive multivalued mappings, providing a convergence analysis under appropriate parameters. Very recently, Taiwo et al. [28] introduced the following Halpern-S-iteration method:
They aimed to approximate the common solution of the EP and FPP for relatively nonexpansive multivalued mappings within uniformly convex and uniformly smooth Banach spaces. Moreover, they established strong convergence under appropriate conditions on the parameters.
An effective strategy for accelerating the convergence rate of iterative algorithms is to integrate an inertial term into the iterative scheme. This term \(\gamma _{n}(\mathfrak{s}{n}-\mathfrak{s}{n-1})\) serves as a powerful tool to enhance algorithm performance, showcasing favorable convergence characteristics. The concept of the inertial extrapolation method was initially introduced by Polyak [23] and inspired by an implicit discretization of a second-order-in-time dissipative dynamical system known as the “Heavy Ball with Friction.”
In 2008, Mainge [17] introduced the following inertial Krasnosel’skiı̌–Mann algorithm by integrating the Krasnosel’skiı̌–Mann algorithm with inertial extrapolation:
He demonstrated that the sequence \(\{\mathfrak{s}_{n}\}\) generated by the algorithm converges weakly to a fixed point of \(\mathbb{S}\) under certain conditions on parameters. This has sparked growing interest among authors working in this area, as evidenced in works such as [2, 4, 6–9, 14].
Question: Could we apply the inertial technique involving projection method for solving GEP, VIP, and FPP for relatively nonexpansive multivalued mapping in the setting of a 2-uniformly convex and uniformly smooth Banach space?
Explanations: Certainly! The inertial technique, when integrated with projection methods, is applicable to address the GEP, VIP, and FPP associated with relatively nonexpansive multivalued mappings in the context of a 2-uniformly convex and uniformly smooth Banach space. The inherent 2-uniform convexity and uniform smoothness properties of the Banach space create favorable conditions for the utilization of these techniques, leading to improved convergence behavior of iterative algorithms.
The inertial technique, characterized by its incorporation of an extrapolation term, is renowned for its capacity to expedite convergence in iterative approaches. When coupled with projection methods, it proves especially advantageous in solving complex problems involving multivalued mappings, equilibrium problems, variational inequalities, and fixed point problems.
Inspired by the contributions of Taiwo et al. [28], Zegeye et al. [32], Mainge [17], and Farid et al. [9], we present a novel iterative algorithm employing the inertial technique. This algorithm aims to determine the common solution of the generalized equilibrium problem (GEP), variational inequality problem (VIP), and fixed point problem (FPP) for relatively nonexpansive multivalued mappings. We delve into the strong convergence properties of our proposed method, highlighting specific aspects of our theorem. Additionally, we provide a computational analysis to underscore the significance of our findings and draw comparisons. The results presented in this paper serve to extend and unify numerous previously established outcomes in this particular research domain.
Our paper is organized as follows: In Sect. 2, we offer basic concepts, essential lemmas, and underlying assumptions. Section 3 encompasses our main results, numerical analysis, and graphical presentations. In Sect. 4, we delve into the interpretation of our results.
2 Preliminaries
Here we present a brief overview of some essential concepts that will be utilized in the subsequent discussion. The modulus of smoothness on the set D is represented by the mapping \(\varrho _{D}:[0,\infty )\to [0,\infty )\), defined as follows:
If \(\varrho _{D}(\vartheta ) > 0\) for all \(\vartheta > 0\), then D is termed smooth, and it is uniformly smooth if and only if \(\lim _{s\to 0^{+}}\frac{\varrho _{D}(s)}{s}=0\). The strict convexity of D is characterized by the condition \(\frac{|\mathfrak{w}_{1}+\mathfrak{w}_{2}|}{2} < 1\) for all \(\mathfrak{w}_{1},\mathfrak{w}_{2}\in \mathbb{U}\) with \(\mathfrak{w}_{1}\neq \mathfrak{w}_{2}\), where \(\mathbb{U}=\{\mathfrak{w}\in D: \|\mathfrak{w}\|=1\}\).
The modulus of convexity on D is the map \(\delta _{D}:(0,2]\to [0,1]\) defined as follows:
A space E is uniformly convex if and only if \(\delta _{D}(\varepsilon )>0\) for all \(\varepsilon \in (0,2]\). In the context of a space E, it is said to be p-uniformly convex if there exists a constant \(c_{p}>0\) such that \(\delta _{D}(\varepsilon )\geq c_{p}\) for all \(\varepsilon \in (0,2]\), as outlined in [30]. For more detailed information, we refer to the cited source.
The Lyapunov function \(\phi : E\times E\to \mathbb{R}\) is defined by
It is worth noting that the characterization of the metric projection on a subset of a Hilbert space as nonexpansive is specific to Hilbert spaces and is not readily applicable to more general Banach spaces. In addressing this limitation, Alber [3] introduced an operator in a Banach space known as the generalized projection, as further discussed in [24].
For \(\mathfrak{w}_{1},\mathfrak{w}_{2},\mathfrak{w}_{3}\in D\) and \(\lambda \in (0,1)\), the function ϕ as defined by Alber [3] satisfies the following well-known properties:
-
(L1)
\((\|\mathfrak{w}_{1}-\mathfrak{w}_{2}\|)^{2}\leq \phi (\mathfrak{w}_{1}, \mathfrak{w}_{2})\leq (\|\mathfrak{w}_{1}+\mathfrak{w}_{2}\|)^{2}\);
-
(L2)
\(\phi (\mathfrak{w}_{1},J^{-1}(\lambda J\mathfrak{w}_{2}+(1-\lambda ) J \mathfrak{w}_{3})\leq \lambda \phi (\mathfrak{w}_{1},\mathfrak{w}_{2})+(1- \lambda )\phi (\mathfrak{w}_{1},\mathfrak{w}_{3})\);
-
(L3)
\(\phi (\mathfrak{w}_{1},\mathfrak{w}_{2})=\phi (\mathfrak{w}_{1}, \mathfrak{w}_{3})+\phi (\mathfrak{w}_{3},\mathfrak{w}_{2})+2\langle \mathfrak{w}_{3}-\mathfrak{w}_{1}, J\mathfrak{w}_{2}-J\mathfrak{w}_{3} \rangle \);
-
(L4)
\(\phi (\mathfrak{w}_{1},\mathfrak{w}_{2})\leq 2 \langle \mathfrak{w}_{2}- \mathfrak{w}_{1}, J\mathfrak{w}_{2}-J\mathfrak{w}_{1} \rangle \).
Continuing, we introduce the functional \(\Phi :E\times E^{*}\to \mathbb{R}\) defined as
It is worth noting that \(\Phi (\mathfrak{w},\mathfrak{w}^{*})=\phi (\mathfrak{w}, J^{-1} \mathfrak{w}^{*})\), and Φ exhibits convexity in its second argument. Additionally,
this convexity property holds for all \(\mathfrak{w}\in E\) and \(\mathfrak{w}^{*}, \mathfrak{v}^{*}\in E^{*}\), as demonstrated in [3].
An element \(\mathfrak{w}_{0}\in D\) is referred to as an asymptotic fixed point of \(\mathbb{S}:D \to D\) if there exists a sequence \(\{\mathfrak{w}_{n}\}\subset D\) with \(\mathfrak{w}_{n}\rightharpoonup \mathfrak{w}_{0}\) such that \(\lim _{n\to \infty}\|\mathbb{S}\mathfrak{w}_{n}-\mathfrak{w}_{n}\|=0\). We denote the set of asymptotic fixed points as \(\widehat{{{\mathrm{F}}}}(\mathbb{S})\). A map \(\mathbb{S}\) is considered relatively nonexpansive if \(\widehat{{{\mathrm{F}}}}(\mathbb{S})={\mathrm{F}}(\mathbb{S})\neq \emptyset ~ \text{and}~\phi (\mathfrak{w}_{0},\mathbb{S}\mathfrak{w})\leq \phi ( \mathfrak{w}_{0},\mathfrak{w})\), \(\forall \mathfrak{w}\in D\), \(\mathfrak{w}_{0}\in F(\mathbb{S})\).
Consider \(N(D)\neq \emptyset \) as a family of subsets of D, and \(CB(D)\neq \emptyset \) as a family of closed bounded subsets of D. The Hausdorff metric, denoted as \(\mathbb{H}(D_{1}, D_{2})\), between \(D_{1}\) and \(D_{2}\) in \(CB(D)\) is defined as
where \(d(\mathfrak{w},D_{2} )=\inf \{ \|\mathfrak{w} - \mathfrak{w}_{0}\|: \mathfrak{w}_{0} \in D_{1}\}\).
A map \(\mathbb{S}:D \to N(D)\) is nonexpansive if \(\mathbb{H}(\mathbb{S}w_{1},\mathbb{S}w_{2})\leq \|w_{1}-w_{2}\|\). An element \(w_{0}\in D\) is considered an asymptotic fixed point if there exists a sequence \(\{w_{n}\}\subset D\) such that \(w_{n}\rightharpoonup w_{0}\) and \(\lim _{n\to \infty}d(\mathbb{S}w_{n},w_{n})=0\).
A map \(\mathbb{S}\) is said to be relatively nonexpansive if \(\widehat{{{\mathrm{F}}}}(\mathbb{S})={\mathrm{F}}(\mathbb{S})\neq \emptyset \) and \(\phi (w_{0},s)\leq \phi (w_{0},v)\) for all \(v\in D\), \(s\in \mathbb{S}v\), and \(w_{0}\in F(\mathbb{S})\). It is worth noting that Homaeipour et al. [13] provided a counterexample for a relatively nonexpansive multivalued mapping that is not nonexpansive.
Definition 2.1
A map \(\mathfrak{h}:E\to E^{*}\) is called
-
(i)
monotone if \(\langle \mathfrak{w}_{1}-\mathfrak{w}_{2}, \mathfrak{h}\mathfrak{w}_{1}- \mathfrak{h}\mathfrak{w}_{2} \rangle \geq 0,~~~\forall \mathfrak{w}_{1}\), \(\mathfrak{w}_{2}\in E\);
-
(ii)
σ-inverse strongly monotone (in short, ism) if there is \(\sigma > 0\) such that
$$ \langle \mathfrak{w}_{1}-\mathfrak{w}_{2}, \mathfrak{h}\mathfrak{w}_{1}- \mathfrak{h}\mathfrak{w}_{2} \rangle \geq \sigma \|\mathfrak{h} \mathfrak{w}_{1}-\mathfrak{h}\mathfrak{w}_{2}\|^{2},~~\forall \mathfrak{w}_{1},\mathfrak{w}_{2}\in {E}; $$ -
(iii)
Lipschitz continuous if there is \(L > 0\) such that \(\|\mathfrak{h}\mathfrak{w}_{1}-\mathfrak{h}\mathfrak{w}_{2} \|\leq L \|\mathfrak{w}_{1}-\mathfrak{w}_{2}\|\).
Lemma 2.1
[15] Consider a smooth uniformly convex Banach space E and two sequences \(\{\mathfrak{u}_{n}\}\) and \(\{\mathfrak{v}_{n}\}\) in E such that either \(\{\mathfrak{u}_{n}\}\) or \(\{\mathfrak{v}_{n}\}\) is bounded. If \(\lim _{n\to \infty}\phi (\mathfrak{u}_{n},\mathfrak{v}_{n})=0\), then \(\lim _{n\to \infty}\|\mathfrak{u}_{n}-\mathfrak{v}_{n}\|=0\).
Remark 2.1
It is evident that the converse of Lemma 2.1 holds whenever both sequences \(\{\mathfrak{u}_{n}\}\) and \(\{\mathfrak{v}_{n}\}\) are bounded, as discussed in [15].
Lemma 2.2
[21] Let D be a nonempty closed convex subset of a real Banach space E, and let \(\mathfrak{h}\) be a monotone hemicontinuous mapping from D into \(E^{*}\). Then the solution set of the VIP (1.3), denoted as \({\mathrm{VIP}}(D, \mathfrak{h})={\mathrm{Sol(VIP\textit{(1.3)})}}\), is closed and convex.
Lemma 2.3
[13] Consider a strictly convex and smooth Banach space E and a nonempty closed convex subset D of E. Let \(\mathbb{S}:D\to CB(D)\) be a relatively nonexpansive multivalued mapping. Then the fixed point set \({\mathrm{F}}(\mathbb{S})\) is closed and convex.
Lemma 2.4
[3] In a reflexive strictly convex smooth Banach space E, with D being a nonempty closed convex subset of E, the following inequality holds for all \(\mathfrak{w}\in D\) and \(\mathfrak{v}\in E\):
Lemma 2.5
[3] In a reflexive strictly convex Banach space E, considering a nonempty closed convex subset D of a smooth Banach space E, and given \(\mathfrak{w}\in E\) and \(\mathfrak{z}\in D\), we have the following equivalence:
Lemma 2.6
[31] For a closed ball \(E_{R}(0)\) of a uniformly convex Banach space E, there exists a continuous strictly increasing convex function \(g:[0,\infty )\to [0,\infty )\) with \(g(0)=0\) such that
where \(\lambda _{i}\in (0,1)\) with \(\sum \limits _{i=1}^{N} \lambda _{i}=1\), and \(\mathfrak{w}{i}\in E_{R}(0)=\{\mathfrak{w}\in E:\|\mathfrak{w}\| \leq R\}\).
Lemma 2.7
[18] Let \(\{c_{n}\}\) be a sequence of real numbers that is nondecreasing at infinity. Then there exists a subsequence \(\{c_{n_{i}}\}\) of \(\{c_{n}\}\) such that \(c_{n_{i}}< c_{n_{i+1}}\) for all \(i\in \mathbb{N}\). Additionally, for a nondecreasing sequence \(\{m_{k}\}\subset \mathbb{N}\) with \(m_{k}\to \infty \) and \(m_{k}=\max \{j\leq k:c_{j}\leq c_{j+1}\}\), it satisfies the inequalities
Lemma 2.8
[22] Let \(\{c_{n}\}\) be a sequence of nonnegative real numbers satisfying
where \(\gamma _{n}\in (0,1)\) and \(\xi _{n}\in R \) with \(\lim \limits _{n\to \infty}\gamma _{n}=0\), \(\sum \limits _{n=1}^{ \infty}\gamma _{n}=\infty \), and \(\limsup \limits _{n\to \infty}\xi _{n}\leq 0\). Then \(\lim \limits _{n\to \infty}c_{n}=0\).
Lemma 2.9
[25] Let E be a p-uniformly convex Banach space. Then the relation between the metric and Bregman distance is
for all \(\mathfrak{w},\mathfrak{v}\in E\), where \(\pi _{p}\) is a fixed positive number. Moreover, using Young’s inequality, for all \(p,q>1\) such that \(\frac{1}{p}+\frac{1}{q}=1\), we have
Lemma 2.10
[30] In a 2-uniformly convex Banach space E,
for all \(\mathfrak{w},\mathfrak{v}\in E\), where \(0< c\leq 1\); c is referred to as the 2-uniformly convex constant of E.
Assumption 2.1
[9] Let \(\mathbb{G},\varepsilon :D\times D\to \mathbb{R}\) be bifunctions satisfying the following properties:
-
(i)
\(\mathbb{G}(\mathfrak{w},\mathfrak{w})=0\), \(\forall \mathfrak{w}\in D\);
-
(ii)
\(\mathbb{G}\) is monotone, i.e., \(\mathbb{G}(\mathfrak{w},\mathfrak{v})+\mathbb{G}(\mathfrak{v}, \mathfrak{w})\leq 0,~~\forall \mathfrak{w}\), \(\mathfrak{v}\in D\);
-
(iii)
for all \(\mathfrak{w},\mathfrak{v},\mathfrak{z}\in D\), \(\lim \limits _{\alpha \to 0^{+}}\mathbb{G}(\alpha \mathfrak{z}+(1- \alpha )\mathfrak{w},\mathfrak{v})\leq \mathbb{G}(\mathfrak{w}, \mathfrak{v})\);
-
(iv)
for each \(\mathfrak{w}\in D\), \(\mathfrak{v}\to \mathbb{G}(\mathfrak{w},\mathfrak{v})\) is convex and lower semicontinuous.
-
(v)
ε is skew-symmetric, i.e.,
$$ \varepsilon (\mathfrak{w},\mathfrak{w})-\varepsilon (\mathfrak{w}, \mathfrak{v})-\varepsilon (\mathfrak{v},\mathfrak{w})+\varepsilon ( \mathfrak{v},\mathfrak{v})\geq 0,\quad \forall \, \mathfrak{w}, \mathfrak{v}\in D; $$ -
(vi)
ε is convex in the second argument;
-
(vii)
ε is continuous.
For a given \(r > 0\), the mapping \(\Psi _{r}: E \to D\) is defined as follows:
Lemma 2.11
[10] Let D be a nonempty closed convex subset of a smooth strictly convex reflexive Banach space E. Let \(\mathbb{G},\varepsilon :D\times D\to \mathbb{R}\) satisfy Assumption 2.1. Then the mapping \(\Psi _{r}\) defined in (2.4) satisfies the following:
-
(i)
\(\Psi _{r}\) is single-valued;
-
(ii)
\(\langle \Psi _{r}{\mathfrak{w}}-\Psi _{r}{\mathfrak{v}},J\Psi _{r}{ \mathfrak{w}}-J\Psi _{r}\mathfrak{v}\rangle \leq \langle \Psi _{r}{ \mathfrak{w}}-\Psi _{r}{\mathfrak{v}},J{\mathfrak{w}}-J\mathfrak{v} \rangle , \quad \forall \;\; \mathfrak{w}\), \(\mathfrak{v}\in E \);
-
(iii)
\({\mathrm{F}}(\Psi _{r})={\mathrm{Sol(GEP\textit{(1.1)})}}\) is closed and convex;
-
(iv)
\(\phi (q,\Psi _{r}{\mathfrak{w}})+\phi (\Psi _{r}{\mathfrak{w}}, \mathfrak{w})\leq \phi (q,\mathfrak{w})\), \(\quad \forall \;\; q\in { \mathrm{F}}(\Psi _{r})\), \(\mathfrak{w}\in E\).
3 Main outcome
Let \(\mathbb{G},\varepsilon : D\times D\to \mathbb{R}\) be bifunctions, and let \(\mathfrak{h}: E\to E^{*}\) be a nonlinear mapping. Let \(\mathcal{S}_{i}: D\to CB(D)\), \(i=1, 2, 3,\ldots,\mathbb{N}\), represent a finite family of multivalued mappings. We now present our algorithm.
Algorithm 3.1

Theorem 3.1
Let E be a 2-uniformly convex and uniformly smooth real Banach space with dual space \(E^{*}\), and let D be a nonempty closed convex subset of E. Consider bifunctions \(\mathbb{G},\varepsilon :D\times D\to \mathbb{R}\) that satisfy Assumption 2.1, and let \(\mathfrak{h}:E\to E^{*}\) be a σ-ism mapping, where \(\sigma \in (0,1)\). Additionally, let \(\mathcal{S}_{i}:D\to CB(D)\), \(i=1, 2, 3,\ldots,\mathbb{N}\), constitute a finite family of relatively nonexpansive multivalued mappings. Suppose \(\Theta :=\cap _{i=1}^{\mathbb{N}}{\mathrm{F}}(\mathcal{S}_{i})\cap{\mathrm{Sol(GEP(\textit{1.1}))}}\cap {\mathrm{Sol(VIP(\textit{1.3}))}} \neq \emptyset \). Then the sequence \(\{\mathfrak{s}_{n}\}\) generated by Algorithm 3.1converges strongly to \(x^{*}\in \Theta \), where \(x^{*}=\Pi _{\Theta}\mathfrak{s}_{0}\).
Proof
We state that the sequence \(\{\mathfrak{s}_{n}\}\) is bounded. Consider any \(q\in \Theta \). Using properties of ϕ, we estimate
Using Lemmas 2.4, 2.5, and 2.10, we compute
Since \(\eta _{n}<\frac{c^{2}\sigma}{2}\),
Since \(\mathfrak{z}_{n}=J^{-1}(J\mathfrak{s}_{n}+\gamma _{n}(J\mathfrak{s}_{n}-J \mathfrak{s}_{n-1}))\), by using Lemma 2.9 we estimate
Using property (L3) of ϕ, we get
Combining (3.5) and (3.6), we get
Next, using (3.7), we compute
Using induction, we get
This concludes that \(\{\mathfrak{s}_{n}\}\) is bounded, and consequently, \(\{\mathfrak{z}_{n}\}\), \(\{\mathfrak{t}_{n}\}\), \(\{\mathfrak{u}_{n}\}\), and \(\{\mathfrak{v}_{n}\}\) are also bounded.
Next, we show that \(q\in \Theta \) and \(\mathfrak{s}_{n}\to q\). Setting \(\rho _{n}=J^{-1}(\varsigma _{n}J\mathfrak{z}_{n}+(1-\varsigma _{n})J \mathfrak{t}_{n})\). Let \(q\in \Theta \). Then by (2.3) we compute
Using the concept of \(\mathcal{S}_{i}\) and Lemmas 2.6, 2.11, and (3.9), we compute
which implies that
We are evaluating two scenarios outlined below.
Case 1. Assume that for some \(m_{0}\in \mathbb{N}\), \(\phi (q,\mathfrak{s}_{n})\) is nonincreasing for all \(n\geq m_{0}\), and since \(\phi (q,\mathfrak{s}_{n})\) is bounded, it must be convergent. Therefore by utilizing (3.10) it follows that \(\phi (\mathfrak{s}_{n},\mathfrak{z}_{n})\to 0\) and \(\phi (\mathfrak{u}_{n},\mathfrak{v}_{n})\to 0\) as \(n\to \infty \). Additionally, according to (2.1), we obtain
Also, by (3.10), \(\delta _{n,0}\delta _{n,i}g(\|J\mathfrak{v}_{n}-J\mathfrak{w}_{n,i} \|)\to 0\) as \(n\to \infty \), which yields that \(\|J\mathfrak{v}_{n}-J\mathfrak{w}_{n,i}\|\to 0\), and thus by the uniform continuity of \(J^{-1}\) we have
which yields that
Since \(\liminf \limits _{n\to \infty}(1-\varsigma _{n})>0\), \(\eta _{n}( \sigma -\frac{2\eta _{n}}{c^{2}})>0\), we have
Using (2.3) and Lemma 2.10, we get
and by (3.15)
By Lemma 2.1
Applying Lemmas 2.4 and 2.5, we compute
which implies that
Thus \({\mathrm{for ~ each}}~i=1,2,\ldots, \mathbb{N}\), we have
Let \(\{\rho _{n_{i}}\}\) be a subsequence of \(\{\rho _{n}\}\) such that \(\rho _{n_{i}}\rightharpoonup \rho \) and \(\sup \limits _{n\to \infty}\langle \rho _{n}-q,J\mathfrak{z}_{n}-Jq \rangle =\lim \limits _{i\to \infty}\langle \rho _{n_{i}}-q,J \mathfrak{z}_{n_{i}}-Jq \rangle \). Thus by (3.18), (3.20), and the concept of J we get
Next, we show that \(q \in {\mathrm{Sol(VIP\text{(1.3)})}}\). Applying the concept of σ-ism mapping of \(\mathfrak{h}\), by (3.15) and (3.12) we obtain \(\lim \limits _{n\to \infty}\mathfrak{s}_{n}= q\) and \(q\in \mathfrak{h}^{-1}(0)\). Hence \(q \in {\mathrm{Sol(VIP\text{(1.3)})}}\).
Further, we need to show that \(q\in {\mathrm{Sol(GEP\text{(1.1)})}}\). Since \(\mathfrak{v}_{n}=\Psi _{r_{n}}\mathfrak{u}_{n}\), \({\mathrm{for ~ each}}~i=1,2,\ldots, \mathbb{N}\), we get
Let \(y_{s}=(1-s)q+sy\), \(\forall s\in (0,1]\). Since \(y\in D\) and \(q\in D\), we get \(y_{s}\in D\), and hence
Using the concept of ε and G, we have
For \(s > 0\), we have
which yields
Thus \(q\in {\mathrm{Sol(GEP\text{(1.1)})}}\). Further, we prove that \(q\in \cap _{i=1}^{\mathbb{N}}{\mathrm{F}}(\mathcal{S}_{i})\). Using (3.20), (3.22), and the concept of \(\mathcal{S}\), we get \(q\in {\mathrm{F}}(\mathcal{S}_{i})\) and \(q\in \cap _{i=1}^{\mathbb{N}}{\mathrm{F}}(\mathcal{S}_{i})\). Hence \(q\in \Theta \). By Lemma 2.5 we get \(\sup \limits _{n\to \infty}\langle \rho _{n}-x^{*}, J\mathfrak{z}_{n}-Jx^{*} \rangle = \lim \limits _{i\to \infty} \langle \rho _{n_{i}}-x^{*}, J \mathfrak{z}_{n_{i}}-Jx^{*} \rangle \leq 0\). By Lemma 2.8 and (3.11), \(\phi (\mathfrak{s}_{n},x^{*})\to 0\). Further, using Lemma 2.1, we obtain that \(\{\mathfrak{s}_{n}\}\) converges strongly to \(x^{*}=\Pi _{\Theta}\mathfrak{s}_{0}\).
Case 2. Let \(\{\phi (q,\mathfrak{s}_{n})\}\) be not decreasing. Then there exists a subsequence \(\{\mathfrak{s}_{n_{i}}\}\) of \(\{\mathfrak{s}_{n}\}\) such that \(\phi (q,\mathfrak{s}_{n_{i}})<\phi (q,\mathfrak{s}_{n_{i+1}})\) \({\mathrm{for ~ each}}~i=1,2,\ldots, \mathbb{N}\). By Lemma 2.7 there exists a nondecreasing sequence \(\{m_{j}\}\subset \mathbb{N}\) such that \(m_{j}\to \infty \) and \(\phi (q,\mathfrak{s}_{m_{j}})\leq \phi (q,\mathfrak{s}_{m_{j+1}})\) and \(\phi (q,\mathfrak{s}_{j})\leq \phi (q,\mathfrak{s}_{m_{j+1}})\) for \(j\in \mathbb{N}\). Using (3.10), we get
Using arguments similar to those in case 1, we have that for each \(i=1,2,\ldots, \mathbb{N}\), \(\mathfrak{s}_{m_{j}}-\mathfrak{z}_{m_{j}}\to 0\), \(\mathfrak{v}_{m_{j}}-\mathfrak{w}_{m_{j},i}\to 0\), and \(\mathfrak{v}_{m_{j}}-\mathfrak{w}_{m_{j},i}\to 0\) as \(j\to \infty \).
Thus
Using (3.11), we obtain
Since \(\phi (x^{*},\mathfrak{s}_{m_{j}})\leq \phi (x^{*},\mathfrak{s}_{m_{j+1}})\) for each \(j\in \mathbb{N}\), from (3.23) and (3.24) we have \(\phi (x^{*},\mathfrak{s}_{m_{j}})\to 0\) and \(\phi (x^{*},\mathfrak{s}_{m_{j+1}})\to 0\) as \(j\to \infty \). Also, \(\phi (x^{*},\mathfrak{s}_{j})\leq \phi (x^{*},\mathfrak{s}_{m_{j+1}})\) for each \(j\in \mathbb{N}\), and therefore \(\mathfrak{s}_{j}\to x^{*}\) as \(j\to \infty \). Thus, based on the above two cases, we observe that the sequence \(\{\mathfrak{s}_{n}\}\) converges strongly to \(x^{*}=\Pi _{\Theta}\mathfrak{s}_{0}\). □
In a similar vein, we proceed to enumerate some corollaries derived from the implications of Theorem 3.1. This enumeration not only serves as a concise summary of the theoretical outcomes but also lays the groundwork for further exploration and application of the proposed iterative scheme in diverse mathematical and computational contexts.
If we specialize Theorem 3.1 by considering the case where \(N=1\), a pertinent corollary unfolds. This corollary encapsulates a more specific scenario.
Corollary 3.1
Let E be a 2-uniformly convex and uniformly smooth real Banach space with dual space \(E^{*}\), and let D be a nonempty closed convex subset of E. Consider bifunctions \(\mathbb{G},\varepsilon :D\times D\to \mathbb{R}\) that satisfy Assumption 2.1, and let \(\mathfrak{h}:E\to E^{*}\) be a σ-ism mapping, where \(\sigma \in (0,1)\). Additionally, let \(\mathcal{S}:D\to CB(D)\) be a relatively nonexpansive multivalued mapping. Suppose \(\Theta :={\mathrm{F}}(\mathcal{S})\cap{\mathrm{Sol(GEP\textit{(1.1)})}}\cap { \mathrm{Sol(VIP\textit{(1.3)})}} \neq \emptyset \). Then the sequence \(\{\mathfrak{s}_{n}\}\) generated by Algorithm 3.1converges strongly to \(x^{*}\in \Theta \), where \(x^{*}=\Pi _{\Theta}\mathfrak{s}_{0}\).
Continuing in the same vein, we explore further implications and consequences arising from the conditions established in Theorem 3.1 when \(\mathbb{G}\) and ε are specifically assumed to be zero.
Corollary 3.2
Let E bedenote a 2-uniformly convex and uniformly smooth real Banach space, with dual space \(E^{*}\), and let D be a nonempty, closed, and convex subset of E. Consider bifunctions \(\mathbb{G},\varepsilon :D\times D\to \mathbb{R}\) that satisfy Assumption 2.1, and let \(\mathfrak{h}:E\to E^{*}\) be a σ-ism mapping, where \(\sigma \in (0,1)\). Additionally, let \(\mathcal{S}:D\to CB(D)\) be a relatively nonexpansive multivalued mapping. Suppose \(\Theta :=\cap \_{i=1}^{\mathbb{N}}{\mathrm{F}}(\mathcal{S}_{i})\cap {\mathrm{Sol(VIP( \textit{1.3}))}} \neq \emptyset \). Then, the sequence \(\{\mathfrak{s}_{n}\}\) generated by Algorithm 3.1converges strongly to \(x^{*}\in \Theta \), where \(x^{*}=\Pi _{\Theta}\mathfrak{s}_{0}\).
Remark 3.1
If E is a Hilbert space H, then \(E^{*}=H\), \(J=I\), the identity mapping, \(\phi (u,v)=\|u-v\|^{2},~\forall u\), \(v\in E\), \(c=1\), 2-uniformly convex constant of E, \(\Pi _{D}=P_{D}\), the metric projection onto D, and a relatively nonexpansive mapping is nonexpansive. These simplifications result from the specific properties and structures of Hilbert spaces, making certain operations and concepts more straightforward.
3.1 Numerical example
Example 3.1
Consider \(E=\mathbb{R}\) and \(D=[0,5]\). We define the bimappings \(\mathbb{G}\) and ε by \(\mathbb{G}(p,s)=p(s-p)\) and \(\varepsilon (p,s)=ps\) for \(p,s \in \mathbb{R}\). It is obvious that \(\mathbb{G}\) and ε satisfy Assumption 2.1. Let \(\mathfrak{h}(p)=3p\) and \(\mathcal{S}(p)=[0,\frac{p}{8}]\). Here \(\mathfrak{h}\) is \(\frac{1}{3}\)-ism. Also, \({\mathrm{F}}(\mathcal{S})=0\), and for all \(s\in \mathcal{S}p\), \(\phi (0,s)=|0-s|^{2}\leq |0-p|^{2}=\phi (0,p)\). Let \(q\in \hat{{\mathrm{F}}}(\mathcal{S})\). Then there exists \(\{p_{n}\}\) such that \(p_{n}\rightharpoonup q\) and \(d(p_{n},\mathcal{S}p_{n})=\frac{7}{8}|p_{n}|\to 0\) as \(n\to \infty \). This yields that \(p_{n}\to 0\), and thus \(q=0\). Therefore \(\hat{{\mathrm{F}}}(\mathcal{S})={\mathrm{F}}(\mathcal{S})=\{0\}\), that is, \(\mathcal{S}\) is a relatively nonexpansive multivalued mapping. Notice that \(r_{n}=\{\frac{1}{10}\}\), \(\eta _{n}=\{\frac{1}{6}\}\), \(\varsigma _{n}=\{\frac{1}{10n}\}\), and \(\delta _{n,0}=\{\frac{1}{2n+1}\}\) with \(\sum \limits _{j=0}^{\mathbb{N}}\delta _{n,j}=1\). Choose \(\gamma _{n}=\left \{ \begin{array}{l} \min \{\frac{1}{5(n+1)\|\mathfrak{s}_{n}-\mathfrak{s}_{n-1}\|},~ 0.25 \}~~~{\mathrm{if}}~\mathfrak{s}_{n}\neq \mathfrak{s}_{n-1}, \\ 0.25 ~~~~~~~~~~~~~~~~~~~~~~~~~~~~{\mathrm{else.}} \end{array} \right \}\)
Then the sequences originated by Algorithm 3.1 converges to \(q=\{0\}\in \Theta \).
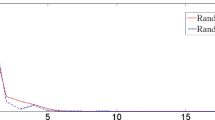
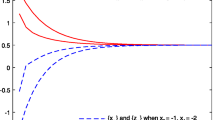
We use Matlab R2015(a) for the computation and comparison of our result with [13, 17]. For the computation and graphical representation of the proposed and Mainge algorithms, we use same initial points \((s_{0},s_{1})\), whereas for Homaeipur et al., we use \(s_{1}\). The stopping criterion for our computation is \(\|\mathfrak{s}_{n+1}-\mathfrak{s}_{n}\|<10^{-10}\). The computation and comparison graphs are shown in Table 1 and Figs. 1–4, respectively.

Plotting for \((s_{0},s_{1})=(0,0.22)\) and \((s_{0},s_{1})=(1,1.5)\)

Plotting for \((s_{0},s_{1})=(0,0.22)\) and \((s_{0},s_{1})=(1,1.5)\)

Plotting for \((s_{0},s_{1})=(0.93,1.5)\) and \((s_{0},s_{1})=(1.13,2.4)\)

Plotting for \((s_{0},s_{1})=(0.93,1.5)\) and \((s_{0},s_{1})=(1.13,2.4)\)
4 Conclusions
In conclusion, our investigation has yielded several key findings. The proposed algorithm, presented in this work, demonstrates strong convergence to a solution in 2-uniformly convex and uniformly smooth real Banach space setting with relatively nonexpansive multivalued mapping. The theoretical results are supported by numerical experiments, where we employed Matlab R2015(a) for computation and compared our findings with existing algorithms, particularly those proposed by Homaeipour et al. and Mainge. The use of consistent initial points and a specified stopping criterion allowed for a fair comparison across different algorithms. The results presented in Table 1 and Figs. 1–4 showcase the effectiveness of our approach in terms of convergence behavior. These findings contribute to the ongoing research in optimization algorithms and provide valuable insights into the applicability of the proposed method in various contexts.
Data Availability
No datasets were generated or analysed during the current study.
References
Adamu, A., Chidume, C.E., Kitkuan, D., Kumam, P.: Geometric inequalities for solving variational inequality problems in certain Banach spaces. J. Nonlinear Var. Anal. 7, 267–278 (2023)
Alansari, M., Ali, R., Farid, M.: Strong convergence of an inertial iterative algorithm for variational inequality problem, generalized equilibrium problem, and fixed point problem in a Banach space. J. Inequal. Appl. 2020, 42 (2020). https://doi.org/10.1186/s13660-020-02313-z
Alber, Y.I.: Metric and generalized projection operators in Banach spaces. In: Properties and Applications. Lect. Notes Pure Appl. Math., pp. 15–50 (1996)
Aldosary, S.F., Cholamjiak, W., Ali, R., Farid, M.: Strong convergence of an inertial iterative algorithm for generalized mixed variational-like inequality problem and Bregman relatively nonexpansive mapping in reflexive Banach space. J. Math. 2021, 9421449 (2021)
Blum, E., Oettli, W.: From optimization and variational inequalities to equilibrium problems. Math. Stud. 63, 123–145 (1994)
Bot, R.I., Csetnek, E.R., Hendrich, C.: Inertial Douglas–Rachford splitting for monotone inclusion problems. Appl. Math. Comput. 256, 472–487 (2015)
Dong, Q.L., Yuan, H.B., Cho, Y.J., Rassias, T.M.: Modified inertial Mann algorithm and inertial CQ-algorithm for nonexpansive mappings. Optim. Lett. 12(1), 87–102 (2018)
Farid, M., Ali, R., Cholamjiak, W.: An inertial iterative algorithm to find common solution of a split generalized equilibrium and a variational inequality problem in Hilbert spaces. J. Math. 2021, 3653807 (2021)
Farid, M., Ali, R., Kazmi, K.R.: Inertial iterative method for a generalized mixed equilibrium, variational inequality and a fixed point problems for a family of quasi-ϕ-nonexpansive mappings. Filomat 37(18), 6133–6150 (2023)
Farid, M., Irfan, S.S., Khan, M.F., Khan, S.A.: Strong convergence of gradient projection method for generalized equilibrium problem in a Banach space. J. Inequal. Appl. 2017, 297 (2017). https://doi.org/10.1186/s13660-017-1574-x
Górniewicz, L.: Topological Fixed Point Theory of Multivalued Mappings. Mathematics and Its Applications, vol. 495. Kluwer Academic, Dordrecht (1999)
Hartman, P., Stampacchia, G.: On some non-linear elliptic differential-functional equations. Acta Math. 115, 271–310 (1966)
Homaeipour, S., Razani, A.: Weak and strong convergence theorems for relatively nonexpansive multi-valued mappings in Banach spaces. Fixed Point Theory Appl. 2011, 73 (2011)
Jiang, B., Wang, Y., Yao, J.-C.: Two new multi-step inertial regularized algorithms for hierarchical variational inequality problems with generalized Lipschitzian mappings. J. Nonlinear Convex Anal. 25(1), 99–121 (2024)
Kamimura, S., Takahashi, W.: Strong convergence of a proximal-type algorithm in a Banach space. SIAM J. Optim. 13, 938–945 (2002)
Lim, T.C.: A fixed point theorem for multivalued nonexpansive mappings in a uniformly convex Banach space. Bull. Am. Math. Soc. 80, 1123–1126 (1974)
Maingé, P.E.: Convergence theorem for inertial KM-type algorithms. J. Comput. Appl. Math. 219, 223–236 (2008)
Maingé, P.E.: Strong convergence of projected subgradient methods for nonsmooth and nonstrictly convex minimization. Set-Valued Anal. 16(7–8), 899–912 (2008)
Markin, J.T.: Continuous dependence of fixed point sets. Proc. Am. Math. Soc. 38, 545–547 (1973)
Nadler, S.B.: Multi-valued contraction mappings. Pac. J. Math. 30, 475–488 (1969)
Nakajo, K.: Strong convergence for gradient projection method and relatively nonexpansive mappings in Banach spaces. Appl. Math. Comput. 271, 251–258 (2017)
O’Hara, J.G., Pillay, P., Xu, H.K.: Iterative approaches to convex feasibility problems in Banach spaces. Nonlinear Anal. 64(9), 2022–2042 (2006)
Polyak, B.T.: Some methods of speeding up the convergence of iterates methods. USSR Comput. Math. Math. Phys. 4(5), 1–17 (1964)
Reich, S.: A weak convergence theorem for the alternating method with Bregman distances. In: Kartsatos, A.G. (ed.) Theory and Applications of Nonlinear Operators of Accretive and Monotone Type. Lecture Notes in Pure and Applied Mathematics, vol. 178, pp. 313–318. Dekker, New York (1996)
Schopfer, F., Schuster, T., Louis, A.K.: An iterative regularization method for solving the split feasibility problem in Banach spaces. Inverse Probl. 24(9), 055008 (2008)
Sow, T.M.M.: An iterative algorithm for solving equilibrium problems, variational inequalities and fixed point problems of multivalued quasi-nonexpansive mappings. Appl. Set-Valued Anal. Optim. 1(1), 171–185 (2019)
Sow, T.M.M.: A new iterative algorithm for solving some nonlinear problems in Hilbert spaces. J. Nonlinear Sci. Appl. 13(3), 119–132 (2020)
Taiwo, A., Alakoya, T.O., Mewomo, O.T.: Strong convergence theorem for fixed points of relatively nonexpansive multi-valued mappings and equilibrium problems in Banach spaces. Asian-Eur. J. Math. 14(8), 2150137 (2021). https://doi.org/10.1142/S1793557121501370
Wang, Y., Huang, H., Jiang, B.: A self-adaptive relaxed primal-dual iterative algorithm for solving thesplit feasibility and the fixed point problem. Commun. Nonlinear Sci. Numer. Simul. 129, 107699 (2024). https://doi.org/10.1016/j.cnsns.2023.107699
Xu, H.K.: Inequalities in Banach spaces with applications. Nonlinear Anal. 16, 1127–1138 (1991)
Zegeye, H., Ofoedu, E.U., Shahzad, N.: Convergence theorems for equilibrium problem, variational inequality problem and countably infinite relatively quasi-nonexpansive mappings. Appl. Math. Comput. 216(12), 3439–3449 (2010)
Zegeye, H., Shahzad, N.: Convergence theorems for a common point of solutions of equilibrium and fixed point of relatively nonexpansive multivalued mapping problems. Abstr. Appl. Anal. 2012, 859598 (2012). https://doi.org/10.1155/2012/859598
Funding
The Researchers would like to thank the Deanship of Graduate Studies and Scientific Research at Qassim University for financial support (QU-APC-2024-9/1).
Author information
Authors and Affiliations
Contributions
Mohammad Farid: Writing - Original Draft, Software; Saud Fahad Aldosary: Review and Editing. All authors have read and agreed to the published version of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Aldosary, S.F., Farid, M. Inertial iterative method for solving generalized equilibrium, variational inequality, and fixed point problems of multivalued mappings in Banach space. J Inequal Appl 2024, 88 (2024). https://doi.org/10.1186/s13660-024-03166-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13660-024-03166-6