
Abstract
In this paper we discuss the problem of pth moment exponential stability for general nonlinear stochastic differential equations with Markovian switching and time-varying delay. By using the Lyapunov function, the stochastic analysis technique and the generalized Halanay inequality, some novel sufficient conditions on pth moment exponential stability of stochastic differential equations with Markovian switching and time-varying delay are derived. The results obtained in this paper are completely new and modify and improve some known results. Moreover, two numerical examples are also provided to demonstrate the effectiveness and applicability of the theoretical results. The aim of this paper is to investigate pth moment exponential stability of general nonlinear stochastic differential equations with Markovian switching and time-varying delay.
Similar content being viewed by others

1 Introduction
In the last decades, the stability of stochastic differential equations has been extensively studied by many authors (see, e.g., [1–6]). Recently, the stability of stochastic differential equations with Markovian switching (or jumping) has received a lot of attention. For example, Ji and Chizeck [7] and Mariton [8] studied the stability of a jump linear equation. Basak et al. [9] discussed the stability of a semi-linear stochastic differential equation with Markovian switching. Mao [10] as well as Shaikhet [11] investigated the stability for nonlinear stochastic differential delay equations with Markovian switching. Especially, for a systematic and detailed review about stochastic differential equations with Markovian switching, Mao and Yuan [12] should be referred to.
Most of these papers are concerned with asymptotics in the probability or in mean square, while to the best of our knowledge, very few studies on pth moment exponential stability of stochastic differential delay equations with Markovian switching. We should point out that [10], Theorem 4.1 investigated pth moment exponential stability for general nonlinear stochastic differential equations with Markovian switching and constant delay, however, this theorem cannot apply to the case of stochastic differential equations with Markovian switching and variable time delay. We should also point out that [12], Theorem 7.23 discussed pth moment exponential stability for a general nonlinear stochastic differential equation with Markovian switching and time-varying delay under the following assumptions: the delay functions are differentiable and the corresponding derivatives are simultaneously required to be not greater than 1. Obviously these impose a very strict constraint on the model because time delays sometimes vary dramatically with time in real models [13, 14].
Motivated by the above discussions, the purpose of this paper is to study pth moment exponential stability of a general nonlinear stochastic differential equation with Markovian switching and time-varying delay. By virtue of the generalized Halanay inequality and using stochastic analysis techniques, we establish a set of novel sufficient criteria for pth moment exponential stability. Finally, the effectiveness of the proposed methods is illustrated by examples.
2 Model description, notations, and assumptions
Notations
The notations are quite standard. Throughout this paper, \(\mathbb{R}^{n}\) and \(\mathbb{R}^{n \times m}\) denote, respectively, the n dimensional Euclidean space and the set of all \(n \times m\) real matrices. The superscript T denotes the transpose. I is the identity matrix with compatible dimension. For a fixed \(\tau\in[0,\infty)\) denoting the delay or time-lag, let \(\mathcal{C}:=C([-\tau,0];\mathbb{R}^{n})\) be the family of continuous functions \(\zeta:[-\tau,0]\mapsto\mathbb{R}^{n}\) with the norm \(\|\zeta\|:=\sup_{-\tau\leq\theta\leq0}|\zeta(\theta)|\), where \(|\cdot|\) is the Euclidean norm in \(\mathbb{R}^{n}\). If A is a matrix, we denote by \(\|A\|\) its operator norm, i.e., \(\|A\|=\sup{\{|Ax|:|x|=1}\}=\sqrt{\lambda_{\max } (A^{T}A)}\) where \(\lambda_{\max }(\cdot)\) (respectively, \(\lambda_{\mathrm{min}}(\cdot)\)) means the largest (respectively, smallest) eigenvalue of A. Moreover, let \((\Omega,\mathcal {F},\{\mathcal{F}_{t}\}_{t\geq0},\mathbb{P})\) be a complete probability space with a filtration \(\{\mathcal{F}_{t}\}_{t\geq0}\) (i.e., it is right-continuous and \(\mathcal{F}_{0}\) contains all ℙ-null sets). Denote by \(C_{\mathcal {F}_{0}}^{b}([-\tau,0];\mathbb{R}^{n})\) the family of all bounded, \(\mathcal{F}_{0}\)-measurable, \(C([-\tau,0];\mathbb{R}^{n})\)-valued random variables. For \(p>2\) and \(\tau>0\), denote by \(L_{\mathcal {F}_{0}}^{p}([-\tau,0];\mathbb{R}^{n})\) the family of all \(\mathcal {F}_{0}\)-measurable \(C([-\tau,0];\mathbb{R}^{n})\)-valued random variables \(\phi=\{\phi(\theta):-\tau\leq\theta\leq0\}\) such that \(\sup_{-\tau\leq\theta\leq0}\mathbb{E}|\phi(\theta)|^{p}<\infty\), where \(\mathbb{E}\) stands for the corresponding expectation operator with respect to the given probability measure ℙ. \(\omega(t)=(\omega_{1}(t),\ldots,\omega_{m}(t))^{T}\) is an m-dimensional Brownian motion defined on a complete probability space \((\Omega,\mathcal{F},\mathbb{P})\) with a natural filtration \(\{\mathcal{F}_{t}\}_{t\geq0}\) (i.e., \(\mathcal{F}_{t}=\sigma\{\omega(s):0\leq s \leq t\}\) and \(\mathcal{F}_{0}\) contains all ℙ-null sets).
Let \(\{r(t)\}_{t\geq0}\) be a right-continuous irreducible homogeneous Markov chain defined on the probability space \(( {\Omega,{\mathcal{F}},\mathbb{P}} )\) taking values in a finite state space \(\mathbb{S}:=\{ 1,2,\ldots,N \}\) with generator \(\Gamma:=(\gamma_{ij})_{N\times N}\) given by
where \(\Delta>0\), \(\lim_{\Delta\rightarrow0}o(\Delta)/\Delta=0\), \(\gamma_{ij}\geq0\) is the transition rate from i to j, if \(i\neq j\), while \(\gamma_{ii}=-\sum_{j\neq i}\gamma_{ij}\). We assume that the Markov chain \(\{r(t)\}_{t\geq0}\) is independent of the Brownian motion \(\{\omega(t)\}_{t\geq0}\).
Consider a stochastic differential equation with Markovian switching and time-varying delay of the form
on \(t\geq0\), with initial conditions \(r(0)=i_{0}\in\mathbb{S}\) and \(x(s)=\xi(s)\in C_{\mathcal{F}_{0}}^{b}([-\tau,0];\mathbb{R}^{n})\) for \(s\in[-\tau,0]\). Here \(f:\mathbb{R}^{n} \times\mathbb{R}^{n} \times \mathbb{R}^{+} \times\mathbb{S} \rightarrow\mathbb{R}^{n}\) and \(g:\mathbb{R}^{n} \times\mathbb{R}^{n} \times\mathbb{R}^{+} \times \mathbb{S} \rightarrow\mathbb{R}^{n \times m}\) are measurable mappings, \(x(t)=(x_{1}(t), \ldots, x_{n}(t))^{T}\) and \(\tau(t):[0,\infty)\rightarrow[0,\tau]\) is a Borel measurable function.
In order to guarantee the existence and uniqueness of the solution to (2.1), we shall impose some assumptions:
-
(H1)
Both f and g satisfy the local Lipschitz condition. That is, for each \(k=1,2,\ldots\) , there is an \(h_{k}>0\) such that
$$\begin{aligned} \bigl|f(x,y,t,i)-f(\bar{x},\bar{y},t,i)\bigr|+\bigl|g(x,y,t,i)-g(\bar{x},\bar{y},t,i)\bigr| \leq h_{k}\bigl(|x-\bar{x}|+|y-\bar{y}|\bigr) \end{aligned}$$for all \(t\geq0\), \(i\in\mathbb{S}\) and those \(x,y,\bar{x},\bar{y} \in \mathbb{R}^{n}\) with \(|x|\vee|y|\vee|\bar{x}|\vee|\bar{y}| \leq k\).
-
(H2)
Both f and g satisfy the linear growth condition, that is, there is an \(h>0\) such that
$$\begin{aligned} \bigl|f(x,y,t,i)+g(x,y,t,i)\bigr| \leq h\bigl(1+|x|+|y|\bigr) \end{aligned}$$for all \(x,y\in\mathbb{R}^{n}\), \(t\geq0\), and \(i\in\mathbb{S}\).
-
(H3)
\(f(0,0,t,i)=0\), \(g(0,0,t,i)=0\), where \(i \in\mathbb{ S}\), \(t \in\mathbb{R}^{+}\).
Throughout this paper, we always assume that f and g satisfy the usual local Lipschitz condition and linear growth condition. It follows from [10] that, for any given initial data \(r(0)\in\mathbb{S}\) and \(x_{0}=\xi\in C_{\mathcal{F}_{0}}^{b}([-\tau,0];\mathbb{R}^{n})\), system (2.1) has a unique global solution on \(t\in\mathbb{R}^{+}\) and we denote the solution by \(x(t;r(0),\xi)\). For notational simplicity, we write \(x(t;r(0),\xi)=x(t)\).
Let \(C^{2,1}(\mathbb{R}^{n} \times \mathbb{R}^{+} \times\mathbb{S};\mathbb{R}^{+})\) denote the family of all non-negative functions \(V(x,t,i)\) on \(\mathbb{R}^{n} \times \mathbb{R}^{+} \times\mathbb{S}\) which are twice continuously differentiable in x and once differentiable in t. For \(V\in C^{2,1}(\mathbb{R}^{n} \times\mathbb{R}^{+} \times \mathbb{S};\mathbb{R}^{+})\), we define an operator from \(\mathbb{R}^{n}\times\mathbb{R}^{n} \times\mathbb{R}^{+} \times \mathbb{S}\) to ℝ as follows:
where
Under Hypothesis (H3), system (2.1) admits a trivial solution \(x(t;i_{0},0)=0\) corresponding to the initial data \(\xi=0\) and \(r(0)=i_{0}\).
The following definitions will be used in the sequel.
Definition 1
The trivial point of system (2.1) is said to be pth moment exponentially stable if there exist \(\alpha>0\) and \(\beta >0\) such that
holds for any \(\xi\in C_{\mathcal{F}_{0}}^{b}([-\tau,0];\mathbb{R}^{n})\).
Definition 2
For a continuous function \(h:\mathbb{R}\longrightarrow \mathbb{R}\), the upper right Dini-derivative \(d^{+}h\) of h is defined as
3 Main results
In this section, we first present a lemma and a proposition which help us prove our main results.
Lemma 1
(Hardy inequality, [15], Lemma 1)
Assume that there exist constants \(a_{k} \geq0\), \(p_{k} \geq0 \) (\(k=1,2, \ldots,m+1\)), then the following inequality holds:
where \(r>0\) and \(S_{m+1}=\sum_{k=1}^{m+1}p_{k}\). In (3.1), if we let \(p_{m+1}=1\), \(r=S_{m+1}=\sum_{k=1}^{m}p_{k}+1\), we will get
if we let \(p_{m+1}=2\), \(r=S_{m+1}=\sum_{k=1}^{m}p_{k}+2\), we will get
Proposition 1
Assume that there are positive continuous functions \(\lambda_{1}(t,i)\), \(\lambda_{2}(t,i)\) (\(i \in \mathbb{S}\)) such that \(0 < \lambda_{0} \leq\lambda_{1}(t,i)\) and \(0 < \lambda_{2}(t,i) \leq q\lambda_{1}(t,i)\) with \(0 \leq q <1\) for all \(t \in\mathbb{R}^{+}\), and \(y(t,i) \) (\(i \in\mathbb{ S} \)) is a non-negative continuous function on \([-\tau,\infty]\) and satisfies the following inequality:
on \(t \in\mathbb{R}^{+}\), where \(\bar{y}(t,i)=\sup_{t-\tau \leq s \leq t}\{y(s,r(s))\}\), \(\tau\geq0\) is a constant. Then for all \(t \in\mathbb{R}^{+}\), we have
where \(\tilde{y}(t,i)=\sup_{-\tau\leq t \leq0}|y(t,r(t))|\), and \(\lambda^{\ast}> 0\) is defined as
Proof
Note that the result is trivial if \(\tau =0\). In the following we assume that \(\tau>0\). Denote
By the condition \(0 < \lambda_{0} \leq\lambda_{1}(t,i)\), \(0 < \lambda_{2}(t,i) \leq q\lambda_{1}(t,i)\) for all \(t \in\mathbb{R}^{+}\), we have \(H(0)=-\lambda_{1}(t,i)+\lambda_{2}(t,i) \leq-(1-q)\lambda_{1}(t,i) \leq (q-1)\lambda_{0}<0\), \(\lim_{\lambda\longrightarrow \infty}H(\lambda)=\infty\), and \(H'(\lambda)=1+\lambda_{2}(t,i)\tau e^{\lambda\tau}>0\) for any given fixed \(t \in\mathbb{R}^{+}\). So \(H(\lambda)\) is a strictly monotone increasing function. Therefore for any \(t \in\mathbb{R}^{+}\) there is a unique positive \(\lambda(t,i)\) such that \(\lambda(t,i)-\lambda_{1}(t,i)+\lambda_{2}(t,i)e^{\lambda(t,i)\tau}=0\). From the definition, one has \(\lambda^{\ast}\geq0\). We have to prove \(\lambda^{\ast}>0\). Suppose this is not true. Fix \(\tilde{q}\) satisfying \(0 \leq q<\tilde{q}<1\) and choose \(\epsilon <\min\{(\frac{1}{\tau})\ln(\frac{1}{\tilde{q}}),(1-\frac{q}{\tilde {q}})\lambda_{0}\}\). Then there is \(t^{\ast}\geq0\) such that \(\tilde{\lambda}(t^{\ast},i)<\epsilon\) and \(\tilde{\lambda}(t^{\ast},i)-\lambda_{1}(t^{\ast},i)+\lambda_{2}(t^{\ast},i)e^{\tilde{\lambda}(t^{\ast},i)\tau}=0\). Now we have
which is a contradiction.
For any given \(k>1\), set \(x(t,i)=k\tilde{y}(t,i)e^{-\lambda^{\ast}t}\) and \(z(t,i)=x(t,i)-y(t,i)\). Suppose (3.5) fails. Then there exists a \(k>1\) such that
for some \(t \in\mathbb{R}^{+}\). Let \(\zeta=\inf\{t \geq 0:x(t,i)-y(t,i)\leq0\}\). Then we have for some \(\zeta>\tau\) that
Hence
Let \(\lambda(\zeta,i)\) satisfy \(\lambda(\zeta,i)-\lambda_{1}(\zeta,i)+\lambda_{2}(\zeta,i)e^{\lambda(\zeta ,i)\tau}=0\). According to the definition of \(\lambda^{\ast}\), it follows that
Therefore
Obviously, this contradicts (3.7) and hence
□
Remark
Obviously, if taking \(\mathbb{S}=\{1\}\), then Proposition 1 reduces to [15], Lemma 2. So Proposition 1 extends and improves the corresponding result given in [15], Lemma 2.
Theorem 1
Let (H1) and (H2) hold. Assume that there exists a function \(V \in C^{2,1}(\mathbb{R}^{n} \times \mathbb{R}^{+} \times\mathbb{S}; \mathbb{R}^{+})\) such that
and
for all \(x, y \in\mathbb{R}^{n}\), \(t \in\mathbb{R}^{+}\) and \(i \in \mathbb{S}\), where p, \(c_{1}\), \(c_{2}\) are positive numbers and \(0 < \lambda_{0} \leq\lambda_{1}(t,i)\), \(0 <\lambda_{2}(t,i) \leq q\lambda_{1}(t,i) \) with \(0 \leq q < 1\). Then
for all \(\xi\in C^{b}_{\mathcal{F}_{0}}([-\tau,0]; \mathbb{R}^{n})\), and
where \(\lambda^{*} > 0\) is the unique root to the equation
In other words, the trivial solution of system (2.1) is pth moment exponentially stable and the pth moment Lyapunov exponent is not greater than \(-\lambda^{*}\).
Proof
For any small enough \(\delta>0\), applying the generalized Itô formula, we have
Taking \(y(t,r(t))=\mathbb{E}V(x(t),t,r(t))\), then from inequality (3.4) we obtain
for all \(r(t)=i \in\mathbb{ S}\). Hence, it follows from Proposition 1 that
where \(\tilde{y}(t,i)=\sup_{-\tau\leq s \leq0}y(s,r(s))\).
On the other hand, by inequality (3.8), we get
and
Hence
where \(\lambda^{\ast}\) is the unique positive root of the following equation:
Therefore, by Definition 1, we see that system (2.1) is pth moment exponentially stable. □
4 Numerical examples
In this section, we will discuss two examples to demonstrate the effectiveness of the obtained theory.
Example 1
Consider a one-dimensional stochastic differential equation with Markovian switching and time-varying delay of the form
on \(t\geq0\), where f, g: \(\mathbb{R} \times\mathbb{R}^{+} \times \mathbb{S}\rightarrow\mathbb{R}\), \(\omega(t)\) is a scalar Brownian motion, and \(r(t)\) is a right-continuous irreducible homogeneous Markov chain taking values in \(\mathbb{S}=\{1,2\}\) with generator
Assume that \(\omega(t)\) and \(r(t)\) are mutually independent, and
for all \((x,t) \in\mathbb{R} \times\mathbb{R}^{+}\), while
for all \((y,t) \in\mathbb{R} \times\mathbb{R}^{+}\). To examine third moment exponential stability, we construct a Lyapunov function \(V: \mathbb{R} \times\mathbb{R}^{+} \times\mathbb{S} \rightarrow \mathbb{R}^{+}\) by
with \(\alpha_{1}=\alpha>0\) and \(\alpha_{2}=1\). It is simple to show that the operator from \(\mathbb{R} \times \mathbb{R} \times\mathbb{R}^{+} \times\mathbb{ S}\) to ℝ has the following form:
By conditions (4.2) and (4.3), we have
Noting that
we obtain
and
Choosing α as the solution to
that is, \(\alpha=16.3472\), then we have
Hence
By Theorem 1, we conclude that the trivial solution of (4.1) is third moment exponentially stable.
Example 2
Consider the following one-dimensional stochastic differential equation with Markovian switching and time-varying delay:
where \(r(t)\) is a right-continuous Markov chain taking values in \(\mathbb{S}=\{1,2\}\) with generator
\(f(x(t),x(t-\tau(t)),1)=-(3-0.5\sin t)x(t)+2x(t-\tau(t))\), \(f(x(t),x(t-\tau(t)),2)=-(2.25-0.5\sin t)x(t)+0.5x(t-\tau(t))\), \(g(x(t-\tau(t)),1)=0.5x(t-\tau(t))\), \(g(x(t-\tau(t)),2)=1.5x(t-\tau(t))\), \(\tau(t)=0.1|\cos t|\), \(\omega(t)\) is a scalar Brownian motion. In this example, let \(p=3\), \(c_{1}=c_{2}=1\), \(V(x,t,i)=x^{3}\). By a simple computation, we can easily get
and
Hence, we have
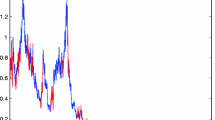
By Theorem 1, we conclude that system (4.8) is the third moment exponentially stable. Numerical simulation further confirms the obtained results. Figures 1 and 2 show that the states x of system (4.8) asymptotically approach zero indeed.

Trajectory of \(\pmb{x(t)}\) of system ( 4.8 ).

Trajectory of \(\pmb{r(t)}\) of system ( 4.8 ).
5 Conclusions
In this paper, we have investigated pth moment exponential stability of stochastic differential equations with Markovian switching and time-varying delay. By using the Lyapunov function, the generalized Halanay inequality, and stochastic analysis techniques, some sufficient conditions are derived to ensure pth moment exponential stability. The results obtained in this paper generalize and improve many well-known results. It is worth pointing out that the contribution of this paper is that the traditional assumptions on the differentiability of the time-varying delay and the boundedness of its derivative are necessary in the earlier works. However, we take these restrictiveness away in this paper. Moreover, we present two examples to illustrate well the obtained results.
References
Arnold, L: Stochastic Differential Equations: Theory and Applications. Wiley, New York (1972)
Friedman, A: Stochastic Differential Equations and Their Application, vol. 2. Academic Press, New York (1976)
Has’minskii, RZ: Stochastic Stability of Differential Equations. Sijthoff & Noordhoff, Moscow (1981)
Mohammed, SEA: Stochastic Functional Differential Equations. Longman, Harlow (1986)
Kolmanovskii, VB, Myshkis, A: Applied Theory of Functional Differential Equations. Kluwer Academic, Boston (1992)
Mao, X: Exponential Stability of Stochastic Differential Equations. Dekker, New York (1994)
Ji, Y, Chizeck, HJ: Controllability, stabilizability and continuous-time Markovian jump linear quadratic control. IEEE Trans. Autom. Control 35, 777-788 (1990)
Mariton, M: Jump Linear Systems in Automatic Control. Dekker, New York (1990)
Basak, GK, Bisi, A, Ghosh, MK: Stability of a random diffusion with linear drift. J. Math. Anal. Appl. 202, 604-622 (1996)
Mao, X: Stability of stochastic differential equations with Markovian switching. Stoch. Process. Appl. 79, 45-67 (1999)
Shaikhet, L: Stability of stochastic hereditary systems with Markov switching. Theory Stoch. Process. 2(18), 180-184 (1996)
Mao, X, Yuan, C: Stochastic Differential Equations with Markovian Switching. Imperial College Press, London (2006)
Huang, C, He, Y, Huang, L, Zhu, W: pth moment stability analysis of stochastic recurrent neural networks with time-varying delays. Inf. Sci. 178(9), 2194-2203 (2008)
Zhu, E, Yuan, Q: pth moment exponential stability of stochastic recurrent neural networks with Markovian switching. Neural Process. Lett. 38, 487-500 (2013)
Cao, J, Wang, J: Absolute exponential stability of recurrent neural networks with time-varying delays. Neural Netw. 17(3), 379-390 (2004)
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China under Grants nos. 11271087, 11101434, Hunan Provincial Natural Science Foundation of China under Grant no. 12JJ4005, the Scientific Research Funds of Hunan Provincial Science and Technology Department of China under Grants no. 2013FJ4035, Humanities and Social Sciences Foundation of Ministry of Education of China under Grants no. 12YJAZH173, Changsha University of Science and Technology Innovation Foundation for Postgraduate no. CX2014YB19, and the Scientific Research Funds of Hunan Provincial Education Department of China under Grant no. 13C1036.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The authors contributed equally and significantly in writing this article. The authors read and approved the final manuscript.
Rights and permissions
Open Access This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly credited.
About this article

Cite this article
Zhu, E., Tian, X. & Wang, Y. On pth moment exponential stability of stochastic differential equations with Markovian switching and time-varying delay. J Inequal Appl 2015, 137 (2015). https://doi.org/10.1186/s13660-015-0657-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13660-015-0657-9