
Abstract
In this paper, for the purpose of improving the energy efficiency of the industrial sensor networks, we investigated the event-based H∞ filtering problem for a class of discrete-time nonlinear sensor network systems with time-varying delay, packet dropout, and multiplicative noises. Instead of traditional time-triggered communication mechanism, the event-triggered strategy is adopted in industrial sensor network, which could not only reduce the transmission frequency of the sensor measurement output, but also guarantee the prescribed filtering performance, if only the threshold in the event-triggered function is chosen suitably. The time-varying delay characteristic of systems is considered with the event-triggered strategy, which has seldom been studied due to the complexity of time-varying delay and event-triggered strategy. The most common network-induced phenomenon of packet dropout in industrial sensor network is described. The purpose is to design a filter satisfying exponentially stable and H∞ indexes. The main result is that sufficient conditions are established, guaranteeing our proposed filter satisfying filtering performance constraints, and the parameters of filter could be got through the derived linear matrix inequality (LMI), if only it is feasible. At last, the filtering approach is demonstrated by a simulation.
Similar content being viewed by others

1 Introduction
Over the past decades, the H∞ filtering technique has attracted considerable research attention and fruitful results have appeared, see for example [1–13] and the references therein. This is mainly due to the following two reasons. Firstly, in a lot of practical engineering, it is hard to get the probabilistic information of disturbance and the H∞ technique could well deal with this kind of noise signals. Secondly, no matter how precise the system model is, there is also some error between the physical plant and its model. And the robustness of the H∞ filtering approach may tolerate such error in system model. From the above analysis, we could find that investigating the H∞ filtering technique has not only theoretically importance but also engineering significance. As such, we will employ the H∞ approach to design the filter for a class of sensor network systems.
It is well known that the limited network channel bandwidth and limited power are significant factors constraining the performance of industrial sensor network systems [14–19]. In traditional time-triggered communication mechanism, the signal of sensor is transmitted to the filter or controller at every time, which does not consider the limited bandwidth of communication channel and therefore increases the burden of industrial sensor network channel. To avoid the unnecessary frequent communication and save limited energy, an effective method is adopting event-triggered strategy [20–24], in which sensor measurement output is transmitted only when an event-triggered condition is satisfied. If only the event-triggered condition is suitably constructed, the transmission frequency of measurement will decrease while maintaining the prescribed filtering performance. During recent years, the event-triggered communication mechanism has been successfully applied to controller design for various engineer systems, such as networked systems [25, 26] and multi-agent systems [27–29]. Also, some results about event-based filter design have appeared, see for example [30–34]. However, when it comes to the industrial sensor network systems, considering the inevitable network-induced phenomena, the event-based filter design approach has not been adequately investigated and still has many problems needed to be solved. Therefore, the event-triggered communication mechanism will be adopted in the filtering problem for the proposed industrial sensor network systems.
Noting that, nonlinear control and filtering have attracted much interest [4, 35–41], due to the popular existence of nonlinearity in a lot of practical systems and its important effectiveness to systems. In [4], a sector-bounded approach is proposed to handle with a class of nonlinearities. It is pointed out that many plants may be modeled by systems with multiplicative noises and some characteristics of nonlinear systems can be closely approximately by models with multiplicative noises rather than by linearized models [42, 43]. Therefore, in this paper, the nonlinearity of addressed systems is described by a nonlinear function and state-multiplicative noises, which could better present the practical nonlinearity.
As a main source of system instability, time-delay widely exists in practical industrial sensor network systems and should be taken into the analysis process of systems. As such, the H∞ filtering for various time-delay plants has attracted much interest, see [35, 44–46] and the reference therein. For example, the robust filter is designed for systems with packet dropout and constant delay in [44]. In [35], a delay-dependent H∞ filtering method is proposed for delay systems whose postpone is time-varying. Very recently, in [30], the event-triggered strategy is adopted to address distributed H∞ filtering problem for industrial sensor networks with time-invarying delay. Unfortunately, up to now, when event-triggered communication is adopted, the relative investigation about event-based H∞ filter design problem has seldom taken time-varying delay into account. Therefore, we will investigate the event-based H∞ filtering problem for industrial sensor networks whose postpone is time-varying.
Summarizing the above discussions, the event-based H∞ filtering problem will be investigated for a class of nonlinear industrial sensor network systems with packet dropouts, multiplicative noises and time-varying delay. The main contributions are highlighted as follows:
1. During the design of filter for a class of discrete-time sensor network systems with time-varying delay, the event-triggered communication mechanism is adopted.
2. A comprehensive model of nonlinear sensor network systems is proposed which subjects to packet dropouts, multiplicative noises, and time-varying delay.
3. Sufficient conditions are built which could ensure proposed filter and corresponding event-based filtering algorithm is addressed.
Section 2 introduces the methods utilized for the energy-efficient filter. In Section 3, the delay sensor network with packet dropouts and multiplicative noises is introduced. The results and discussions are given in Section 4, where sufficient condition is derived for the H∞ filter and the filtering method is addressed. A numerical example is given in Section 5. Finally, we conclude in Section 6.
2 Methods
In this paper, the energy-efficient filter is designed based on Lyapunov theory method and linear matrix inequality method. The simulation experiment is based on the LMI toolbox of MATLAB R2014a.
3 Problem formulation and preliminaries
Here, the following discrete nonlinear sensor network system with time-varying delay and multiplicative noise is considered:
where \(x(k)\in {\mathbb {R}}^{n}\) represents the state vector, \(y(k) \in {\mathbb {R}}^{r}\) is sensor output, \(z(k) \in {\mathbb {R}}^{m}\) is the signal to be estimated, \(w(k)\in {\mathbb {R}}^{p}\) and \(v(k)\in {\mathbb {R}}^{q}\) are disturbance belonging to l2[0,∞],f(·):Rn→Rn is nonlinear vector function, \(\tilde {w}_{i}(k)(i=1, 2,..., \alpha)\) and \(\tilde {v}_{j}(k)(i=1, 2,..., \beta)\) are zero mean Gaussian white noise with \({\mathbb E}\{\tilde {w}_{i}(k)\}=0, {\mathbb E}\{\tilde {w}^{2}_{i}(k)\}=1, {\mathbb E}\{\tilde {w}_{i}(k)\tilde {w}_{j}(k)\}=0(i\neq j), {\mathbb E}\{\tilde {v}_{j}(k)\}=0, {\mathbb E}\{\tilde {v}^{2}_{j}(k)\}=1, {\mathbb E}\{\tilde {v}_{i}(k)\tilde {v}_{j}(k)\}=0(i\neq j), {\mathbb E}\{\tilde {w}_{i}(k)\tilde {v}_{j}(k)\}=0\). The time-varying delay τ(k)∈[dm,dM]. A, Ai, Ad, Adj, B, C, L, andD are known, real matrices with appropriate dimensions.
f(x(k)) is assumed to satisfy the following condition:
where θ>0 is a known scalar and G is a known matrix.
Remark 1
As an essential characteristic for many practical networked systems, time-delay should be considered, due to it is a main source of system instability. Although, for the purpose of decreasing the difficulty of filter design, in many filter design algorithm, time-delay is assumed to be constant. But, the fact is that time-delay is almost time-variant. Therefore, it is more practical significant to design filter for network systems with time-varying delay.
Remark 2
The addressed system (1) is a comprehensive model for industrial sensor network systems which includes the multiple noises, nonlinearity, and time-varying delay. As far as we know, due to the complexity of the addressed system (1), the relevant research results are few. This motivates our research interest.
Different from traditional filter design, the event-triggered strategy is considered, which could reduce communication frequency. As such, a event generator function g(·,·) is defined as follows:
where σ(k)=y(ki)−y(k) with y(ki) being the measurement at the latest event time ki and y(k) is the current measurement. δ∈[0,1] is the threshold. In practical engineering, δ can be determined on the basis of the filtering requirement. When a smaller filtering error is needed, δ is set to be smaller.
The current measurement y(k) of the sensor is transmitted if only the following condition
is met. Thus, the event-triggered sequence 0≤k0≤k1≤···≤ki≤··· is determined iteratively by
Remark 3
The event-triggered strategy is adopted in the networked filter design for industrial sensor network. As is well known, in time-triggered communication mechanism, the measurement output of sensor is transmitted by network communication channel with limited bandwidth at every sampling time, even though the measurement output changes slightly in the next instant, which increases the burden of network channel and wastes a lot of source of industrial sensor network. However, in event-triggered communication mechanism, only when the designed condition is met, then measurement signal of sensor is transmitted. And a suitable threshold in the event generator function could not only reduce the measurement communication frequency but also make sure prescribed filtering performance.
As is well known, the measurement of sensor transmitted by network may encounter packet dropouts. When the phenomenon of packet dropouts is considered, the real measurement obtained by filter can be depicted as
Here, stochastic variable α(ki) is employed to govern the phenomenon of packet dropouts in industrial sensor network. It is assumed to be Bernoulli-distributed white sequence with
For system (1), construct the following filter:
where \(x_{f}(k)\in {\mathbb {R}}^{n}\) is the estimate of the state \(x(k), z_{f}(k) \in {\mathbb {R}}^{m}\) represents the estimate of z(k), and Af,Bf, and Cf is the filter gain matrix to be designed.
By letting \(\eta (k) = [x^{T}(k) \quad e^{T}(k)]^{T}, \tilde {z}(k)=z(k)-z_{f}(k), e(k)=x(k)-x_{f}(k), \bar {w}=[w^{T}(k) \quad v^{T}(k)]^{T}, h(\eta (k))=[f^{T}(x(k))\ f^{T}(x(k))]^{T}\), and \(\tilde {\alpha }(k)=\alpha (k)-\bar {\alpha }\), we could get the augmented system:
where,
Definition 1
[13]: The augmented system (8) with \(\bar {w}(k)=0\) is exponentially mean-square if there exist constant ε>0 and 0<κ<1 thus
Our aim is to design a filter satisfying the following requirements: (Q1) the filtering error system (8) is exponentially mean-square stable, and (Q2) under the zero initial condition, for given scalar γ>0, filtering error \(\tilde {z}(k)\) satisfies
for all nonzero \(\bar {w}(k)\).
4 Results and discussions
The main results and some discussions are presented in this section.
4.1 Analysis of H ∞ performance
First of all, we introduce the following lemma.
Lemma 1
(Schur complement) Given constant matrices S1,S2, and S3, where \(S_{1}=S_{1}^{T}\) and \(0<S_{2}=S_{2}^{T}\), then \(S_{1}+S_{3}^{T} S_{2}^{-1}S_{3}<0\) if and only if
Theorem 1
:Consider the sensor network system(1) and let the filter parameters Af,Bf, and Cf be given. Thus, the filtering error system(8) with \(\bar {w}(k)=0\) is exponentially stable in mean-square, if there exist positive definite matrixes P>0,Q>0 and positive constant scalars ε1, satisfying
where
Proof
: Choose the following Lyapunov function
where
□
Then, according to (8) with \(\bar {w}(k)=0\), there is
Next, it can be derived that
and
Let
It follows from (13)–(15) that
where
Moreover, if follows from (2) that
Furthermore, it follows from (16) and (17) that
Considering the event-triggered condition (3), we have
According to Theorem 1, we have Φ1<0. Thus, for all \(\zeta (k)\neq 0, {\mathbb E}\{\Delta V(k)\}\leq {\mathbb E}\{\zeta ^{T}(k)\tilde {\Phi }_{1}\zeta (k)\}<0\). Furthermore, similar to [13], system (8) can be proved to be exponentially mean-square stable. The proof is complete.
Then, the H∞ index will be analyzed.
Theorem 2
: Let Af,Bf, and Cf and γ be given. Then, system(8) is exponentially stable in the mean-square and satisfies the H∞ performance constraint (9) for any nonzero \(\bar {w}(k)\)under zero initial condition, if there exist matrices P>0,Q>0 and positive constant scalar ε1 satisfying
where
\(\bar {D}=[0 \ \ \ D]\).
Proof
: It is clear that (20) implies (11). From Theorem 1, system (8) is exponentially stable. □
Then, we will analysis the H∞ performance.
where
To handle with H∞ performance, the following index is introduced:
where n is a nonnegative integer.
Under the zero initial condition, we have
According to Theorem 2, we have Φ2<0,J(n)<0. When n→∞, there is
The proof is complete.
4.2 Event-based H ∞ filter design
Here, the H∞ filtering algorithm will be solved in Theorem 3.
Theorem 3
Let the disturbance attention level γ>0 be given. Then, for sensor network system (1) and filter (7), the H∞ performance constraints (9) and exponential stability are guaranteed, if there exist positive matrices P>0,Q>0, and ε1>0 and matrices X and Cf satisfying
where
Furthermore, if (P, Q, X, Cf,ε1) is a feasible solution of (25), then the filter matrices (Af,Bf,Cf) could be obtained by means of matrices X and Cf, where
Proof
: Rewrite Φ2 as follows:
where
□
According to Lemma 1, (27) is equivalent to
Moreover, rewrite the parameters in (8):
Thus, (28) is equivalent to (25). Then, from Lemma 2, we obtain (9), and system (8) is exponentially stable. The proof is complete.
Remark 4
The sufficient conditions guaranteeing the event-based filter satisfy Q1 and Q2 are proposed in Theorem 2. The design problem of desired filter is addressed in Theorem 3. It is easy to find that all the relevant information is contained in the LMI, such as system parameters, nonlinearity, and the threshold of event-triggered function.
5 Numerical simulations
The system (1) is as follows:
f(k,x(k)) and disturbance w(k)andv(k) are chosen as
where xi(i=1,2,3) denotes the ith element of the system state x(k). Then, the constraint (2) can be met with
The initial value of state is x(0)=[0.3 0.25 −0.5]T.The initial value of state estimation is \(\hat {x}(0)=[0\quad 0\quad 0]^{T}\). The probability of stochastic variable α(k) is taken as \(\bar {\alpha }=0.9\). Delay is dM=3,dm=1. Choose the event threshold δ=0.3. The disturbance attenuation level is γ=0.95.
The filter parameters can be obtained as follows:
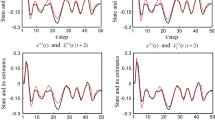
Figures 1, 2, 3, 4, 5, 6, and 7 show the simulation results. When setting the threshold δ=0.3, the results are described in Figs. 1, 2, 3, and 4. Figure 1 depicts the state variables x3(k) and its estimate \(\hat {x}_{3}(k)\), and Fig. 2 plots the output z(k) and its estimation \(\hat {z}(k)\), whereas the estimation error \(z(k)-\hat {z}(k)\) is shown in Fig. 3. Event-triggered times are plotted in Fig. 4, whereas one represents the times that event-triggered condition is satisfied and sensor signal is transmitted and zero represents times that event-triggered condition is not satisfied. It follows from Fig. 4 that the event-triggered communication mechanism can reduce the transmission frequency of the measurement output, which is energy efficient. According to Figs. 1, 2, and 3, it is easy to find that the proposed filter can estimate the state of the system well, and the energy-efficient filtering strategy has satisfying filtering performance. Next, we will compare the event-triggered mechanism with the time-triggered mechanism. When setting the threshold δ=0, e.g., the time-triggered mechanism, the corresponding results are depicted in Figs. 5, 6, and 7. Corresponding to Figs. 1, 2, and 3, Fig. 5 describes x3(k) and its estimate \(\hat {x}_{3}(k)\), and Fig. 6 plots z(k) and its estimation \(\hat {z}(k)\), whereas the estimation error \(z(k)-\hat {z}(k)\) is shown in Fig. 7. Compared with the simulation results between δ=0 and δ=0.3, we conclude that, with suitable threshold δ, the event-triggered mechanism could reduce the network burden while ensuring certain system performance. The results confirm the proposed filter design method which could well achieve the desired filtering requirement.

State x3(k) and its estimate (δ=0.3)

Output z(k) and its estimate (δ=0.3)

Estimation error \(z(k)-\hat {z}(k)\) (δ=0.3)

The event-triggered times (δ=0.3)

State x3(k) and its estimate (δ=0)

Output z(k) and its estimate (δ=0)

Estimation error \(z(k)-\hat {z}(k)\) (δ=0)
6 Conclusions
In this paper, based on the event-triggered mechanism, we have designed the energy efficiency H∞ filter for a class of industrial sensor network system with time-varying delay, packet dropouts, and multiplicative noises. The event-triggered communication mechanism is adopted to improve energy efficiency. It could not only reduce the transmission frequency of the measurement output, but also guarantee the prescribed filtering performance. The time-varying delay is considered with event-triggered strategy, which has seldom been studied. Sufficient conditions are found through stochastic analysis technique. The filter parameters could be obtained by solving the certain LMI. Finally, the simulation confirms the proposed method.
Availability of data and materials
Not applicable.
Abbreviations
- LMI:
-
Linear matrix inequality
References
S. Xu, T. Chen, J. Lam, Robust H ∞ filtering for uncertain Markovian jump systems with mode-dependent time delays. IEEE Trans. Autom. Control. 48(5), 900–907 (2003).
H. Gao, T. Chen, H ∞ Estimation for uncertain systems with limited communication capacity. IEEE Trans. Autom. Control. 52(11), 2070–2084 (2007).
S. Yin, L. Yu, W. Zhang, A switched system approach to networked H infinity filtering with packet losses. Circ. Syst. Signal Proc.30(6), 1341–1354 (2011).
Z. Wang, Y. Liu, X. Liu, H ∞ filtering for uncertain stochastic time-delay systems with sector-bounded nonlinearities. Automatica. 44(5), 1268–1277 (2008).
R. Lu, H. Li, A. Xue, J. Zheng, Q. She, Quantized H-infinity filtering for different communication channels. Circ. Syst. Signal Proc.31(2), 501–519 (2012).
H. Gao, C. Wang, Delay-dependent robust H ∞ and L 2−L ∞ filtering for a class of uncertain nonlinear time-delay systems. IEEE Trans. Autom. Control. 48(9), 1661–1666 (2003).
L. Ma, Z. Wang, Q. Han, H. K. Lam, Envelope-constrained H-infinity filtering for nonlinear systems with quantization effects: the finite horizon case. Automatica. 93:, 527–534 (2018).
L. Xie, L. Lu, D. Zhang, H. Zhang, Improved robust H 2 and H ∞ filtering for uncertain discrete-time systems. Automatica. 40(5), 873–880 (2004).
J. Qiu, G. Feng, J. Yang, A new design of delay-dependent robust filtering for discrete-time T–S fuzzy systems with time-varying delay. IEEE Trans. Fuzzy Syst.17(5), 1044–1058 (2009).
B. Shen, Z. Wang, Y. Hung, Distributed H ∞-consensus filtering in sensor networks with multiple missing measurements: the finite-horizon case. Automatica. 46(10), 1682–1688 (2010).
Z. Duan, J. Zhang, C. Zhang, E. Mosca, Robust H 2 and H ∞ filtering for uncertain linear systems. Automatica. 42(11), 1919–1926 (2006).
H. Gao, Y. Zhao, J. Lam, K. Chen, H ∞ Fuzzy filtering of nonlinear systems with intermittent measurements. IEEE Trans. Fuzzy Syst.17(2), 291–300 (2009).
J. Zhang, Z. Wang, D. Ding, H-infinity state estimation for discrete-time delayed neural networks with randomly occurring quantizations and missing measurements. Neurocomputing. 148:, 388–396 (2015).
W. Zhang, J. Chang, F. Xiao, Y. Hu, N. N. Xiong, Design and analysis of a persistent, efficient, and self-contained WSN data collection system. IEEE Access. 7:, 1068–1083 (2019).
J. Tan, W. Liu, T. Wang, N. N. Xiong, H. Song, A. Liu, Z. Zeng, An adaptive collection scheme-based matrix completion for data gathering in energy-harvesting wireless sensor networks. IEEE Access. 7:, 6703–6723 (2019).
J. Zhao, J. Huang, N. N. Xiong, An effective exponential-based trust and reputation evaluation system in wireless sensor networks. IEEE Access. 7:, 33859–33869 (2019).
R. Wan, N. N. Xiong, Q. Hu, H. Wang, J. Shang, Similarity-aware data aggregation using fuzzy c-means approach for wireless sensor networks. EURASIP J. Wirel. Commun. Netw.2019:, 59 (2019).
X. Liu, S. Zhao, A. Liu, N. N. Xiong, A. V. Vasilakos, Knowledge-aware proactive nodes selection approach for energy management in internet of things. Futur. Gener. Comput. Syst.92:, 1142–1156 (2019).
Y. Liu, K. Ota, K. Zhang, M. Ma, N. N. Xiong, A. Liu, J. Long, QTSAC: an energy-efficient MAC protocol for delay minimization in wireless sensor networks. IEEE Access. 6:, 8273–8291 (2018).
J. Tang, A. Liu, J. Zhang, N. N. Xiong, Z. Zeng, T. Wang, A trust-based secure routing scheme using the traceback approach for energy-harvesting wireless sensor networks. Sensors. 18(3), 751 (2018).
M. Wu, Y. Wu, C. Liu, Z. Cai, N. N. Xiong, A. Liu, M. Ma, An effective delay reduction approach through a portion of nodes with a larger duty cycle for industrial WSNs. Sensors. 18(5), 1535 (2018).
N. N. Xiong, L. Zhang, W. Zhang, A. V. Vasilakos, M. Imran, Design and analysis of an efficient energy algorithm in wireless social sensor networks. Sensors. 17(10), 2166 (2017).
H. Cheng, Z. Su, N. N. Xiong, Y. Xiao, Energy-efficient node scheduling algorithms for wireless sensor networks using Markov random field model. Inf. Sci.329:, 461–477 (2016).
A. Shahzad, M. Lee, N. N. Xiong, G. Jeong, Y. K. Lee, J. -Y. Choi, A. W. Mahesar, I. Ahmad, A secure, intelligent, and smart-sensing approach for industrial system automation and transmission over unsecured wireless networks. Sensors. 16(3), 322 (2016).
X. Wang, M. D. Lemmon, Event-triggering in distributed networked control systems. IEEE Trans. Autom. Control. 56(3), 586–601 (2011).
C. Peng, T. Yang, Event-triggered communication and control co-design for networked control systems. Automatica. 49(5), 1326–1332 (2013).
D. V. Dimarogonas, E. Frazzoli, K. H. Johansson, Distributed event-triggered control for multi-agent systems. IEEE Trans. Autom. Control. 57(5), 1291–1297 (2012).
Y. Fan, G. Feng, Y. Wang, C. Song, Distributed event-triggered control of multi-agent systems with combinational measurements. Automatica. 49(2), 671–675 (2013).
L. Ma, Z. Wang, H. K. Lam, Event-triggered mean-square consensus control for time-varying stochastic multi-agent system with sensor saturations. IEEE Trans. Autom. Control. 62(7), 3524–3531 (2017).
D. Ding, Z. Wang, B. Shen, H. Dong, Event-triggered distributed H ∞ state estimation with packet dropouts through sensor networks. IET Control Theory Appl.9(13), 1948–1955 (2015).
Y. Tan, D. Du, Q. Qi, State estimation for Markovian jump systems with an event-triggered communication scheme. Circ. Syst. Signal Proc.36(1), 2–24 (2017).
D. Zhang, P. Shi, Q. Wang, L. Yu, Distributed non-fragile filtering for T-S fuzzy systems with event-based communications. Fuzzy Sets Syst.306(1), 137–152 (2017).
J. Zhang, C. Peng, Event-triggered H ∞ filtering for networked Takagi-Sugeno fuzzy systems with asynchronous constraints. IET Signal Proc.9(5), 403–411 (2015).
S. Hu, D. Yue, Event-based H ∞ filtering for networked system with communication delay. Signal Proc.92(9), 2029–2039 (2012).
H. Gao, C. Wang, Delay-dependent robust H ∞ and L 2−L ∞ filtering for a class of uncertain nonlinear time-delay systems. IEEE Trans. Autom. Control. 48(9), 1661–1666 (2003).
W. Zhang, B. Chen, C. Tseng, Robust H ∞ filtering for nonlinear stochastic systems. IEEE Trans. Signal Proc.53(2), 589–598 (2005).
H. Gao, Y. Zhao, J. Lam, K. Chen, Fuzzy filtering of nonlinear systems with intermittent measurements. IEEE Trans. Fuzzy Syst.17(2), 291–300 (2009).
H. Dong, Z. Wang, H. Gao, Robust filtering for a class of nonlinear networked systems with multiple stochastic communication delays and packet dropouts. IEEE Trans. Signal Proc.58(4), 1957–1966 (2010).
B. Shen, Z. Wang, H. Shu, G. Wei, H |infty filtering for nonlinear discrete-time stochastic systems with randomly varying sensor delays. Automatica. 45(4), 1032–1037 (2009).
M. Wu, N. N. Xiong, L. Tan, An intelligent adaptive algorithm for environment parameter estimation in smart cities. IEEE Access. 6:, 23325–23337 (2018).
W. Ke, C. Wu, Y. Wu, N. N. Xiong, A new filter feature selection based on criteria fusion for gene microarray data. IEEE Access. 6:, 61065–61076 (2018).
E. Gershon, U. Shaked, I. Yaesh, H ∞ control and filtering of discrete-time stochastic systems with multiplicative noise. Automatica. 37(3), 409–417 (2001).
S. Wen, Z. Zeng, T. Huang, H |infty filtering for neutral systems with mixed delays and multiplicative noises. IEEE Trans. Circ. Syst. II: Express Briefs. 59(11), 820–824 (2012).
Z. Wang, F. Yang, D. W. C. Ho, X. Liu, (2006) Robust H ∞ filtering for stochastic time-delay systems with missing measurements. IEEE Trans. Signal Proc.54(7), 2579–2587 (2006).
H. Gao, C. Wang, A delay-dependent approach to robust H ∞ filtering for uncertain discrete-time state-delayed systems. IEEE Trans. Signal Proc.52(6), 1631–1640 (2004).
E. Fridman, U. Shaked, A new H ∞ filter design for linear time delay systems. IEEE Trans. Signal Proc.49(11), 2839–2843 (2011).
Funding
This work was supported by the Natural Science Foundation of Jiangsu Province of China (Grant No. BK20180467), the Research Start-up Funds of Nanjing University of Science and Technology, and the Alexander von Humboldt Foundation.
Author information
Authors and Affiliations
Contributions
Authors’ contributions
ML carried out the literature analysis and raised and refined the proposed issue in this paper. Meanwhile, she gave the mathematical description of the proposed issue. HL analyzed and designed the filter. JZ verified the analysis and design of the filter by simulation experiments. BZD and YMB checked, reviewed the manuscript, and gave valuable suggestions on the structure of the paper. All authors have read approved the final manuscript.
Authors’ information
Hui Li received his BSc degree in Electrical Engineering and Automation in 2010 from Yangtzue University, JingZhou, China, his MSc degree in Control Theory and Control Engineering in 2013 from University of ShangHai for Science and Technology, ShangHai, China. From April 2016, he studied in Nanjing University of Science and Technology for PhD degree. His current research fields include networked filtering systems, multimedia big data processing, and sensor network systems.
Ming Lyu was born in Taizhou, China, in June 1980. She received her BSc degree in Automatic Control in 2002, her MSc degree in Automatic Control in 2004, and her PhD degree in Control Theory and Control Engineering in 2007, all from Nanjing University of Science and Technology, Nanjing, China. She is currently a research fellow in the School of Automation, Nanjing University of Science and Technology, Nanjing, China. Her current research interests include filtering, networked systems, multimedia big data processing, and sensors network systems.
Jie Zhang received his BSc degree in Automatic Control in 2002, his MSc degree in Automatic Control in 2004, and his PhD degree in Control Theory and Control Engineering in 2011, all from Nanjing University of Science and Technology, Nanjing, China. From April 2013 to March 2014, he was an Academic Visitor in the Department of Information Systems and Computing, Brunel University, UK. He is currently an associate research fellow in the School of Automation, Nanjing University of Science and Technology. His current research interests include stochastic systems, networked systems, wireless sensor network systems, and neural networks.
Yuming Bo received the Ph.D. degree in control theory and control engineering from Nanjing University of Science and Technology, Nanjing, China, in 2005. His research interests are focused on filtering and system optimization.
Baozhu Du received the B.S. in Information and Computing Science, and M.S. degree in Operational Research and Cybernetics from Northeastern University, Shenyang, Liaoning Province, China, in 2003 and 2006, respectively. She obtained the Ph.D. degree in Mechanical Engineering from The University of Hong Kong in 2010. Her current research interests include stability analysis and robust control/filter theory of time-delay systems, positive systems, Markovian jump systems, and networked control systems.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Li, H., Lyu, M., Du, B. et al. Energy-efficient filtering algorithm for a class of industrial sensor network systems with packet dropouts, time-varying delay, and multiplicative noises. J Wireless Com Network 2019, 162 (2019). https://doi.org/10.1186/s13638-019-1482-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13638-019-1482-5