
Abstract
Array signal processing plays an important role in many areas. Besides the Uniform Linear Array, there are many sparse array that have been proposed, for example, Minimum-redundancy array, Co-prime array, nested array, etc. However, most of the array structures have certain disadvantages. A new type of nonlinear sparse sensor array called sparse convolutional array is illustrated which can reduce the number of physical sensors while remain a decent performance in DOA estimation. The sparse convolutional array contains three groups of physical sensors and is able to form a hole-free difference co-array. By adding sensors on two sides instead of the center, the proposed array shows improved performance compared to some other approaches while reminds few physical sensors. The array geometrical structure is illustrated, and the numerical result is provided. We also extended this array structure to two-dimensional case, and the performance is illustrated.
Similar content being viewed by others

1 Introduction
Array signal processing plays an important role in many areas. However, the regular uniform linear array has many disadvantages, such like limited degree-of-freedom and redundant physical sensors, results in a confinement of its applications, e.g., direction-of-arrival (DOA) estimation and beamforming. Traditional spectrum estimations algorithms like multiple signal classification (MUSIC) algorithm have been widely applied in DoA estimations [1]. However, the number of sources that can be resolved with a uniform linear array is less than the number of sensors in the array while applying the MUSIC algorithm. Many researchers have been done regarding to the nonlinear sensor array, aiming at a lower mutual coupling and a higher degree-of-freedom.
The Minimum-redundancy linear array was first proposed in [2] in order to minimize the number of redundant spacings present in the array. Co-Prime array was introduced in [3] where a co-prime pair of M and N sensors achieves O(MN) freedoms which can be exploited in beamforming and in direction of arrival estimation. In [4], the authors proposed nested arrays, which can achieve \(O(N^{2})\) degree of freedom with N physical sensors. Nested array has then been widely studied. In [5], nested array is applied to increase the capacity of multi-cell cooperative cellular networks. In [6], the authors studied nested and co-prime-based underwater non-uniform sensor array networks (UWSANs) for underwater DOA estimation. In [7], the authors use 2D nested array deployment to accomplish channel estimation in massive multi-input multi-output (MIMO) scenario. DOA estimation is also studied over multiple dimensional nonlinear arrays, for example, in [8,9,10]. However, most of the array structures have certain disadvantages, i.e., Minimum Redundancy Array (MRA) has no closed-form expressions for its array geometry, Co-prime array has holes in its difference co-array, Nested array has higher mutual coupling than Co-prime array and MRA [4].
The concept of co-array is introduced in [11, 12] for incoherent and coherent imaging and aperture synthesis techniques. And the concept of sum co-array and difference co-array is then implemented in array geometries [13], as the difference co-array forms naturally in computation of the covariance matrix of the received signal at the sensor array.
DOA estimation for quasi-stationary signals was studied in [14] where a Khatri–Rao (KR) subspace-based MUSIC algorithm was implemented on uniform linear array. The proposed KR-MUSIC algorithm works on Khatri–Rao subspace instead of array manifold matrix and therefore, allows array with N sensors handles up to \(2N-2\) sources. This approach could also be implemented to nonlinear array since a well-designed sparse array could form a larger difference co-array compared to the uniform linear array. The authors of [15] proposed a nonlinear beamformer called convolutional beamforming algorithm (COBA) in their research to form B-mode images which is used in commercial medical ultrasound systems. This convolutional beamformer based on the convolution of the delayed RF signals prior to summation and sparse array structure shows a better resolution and contrast compares to the traditional delay and sum (DAS) beamformer. However, the authors research focused on sum co-array perspective, since the beam pattern of the convolutional beamformer depends on the sum co-array rather than the physical array and amplitude apodization is applied on the sum co-array for suppressing side lobes [16].
In this paper, we studied the sparse convolutional array structure in perspective of difference co-array and the approaches in DOA estimation. The sparse convolutional array is demonstrated in both one-dimension and two-dimension. The main purpose of implementing this array structure is to reduce the number of physical sensors. By adding a dense set of sensors on two sides of the sparse sensors, the proposed array shows improved resolution while reminds small number of physical sensors. The KR product-based MUSIC algorithm [14] is implemented for the proposed sensor array for DOA estimation. The spectrum was illustrated, and the root mean square error (RMSE) was simulated. We then extended this array to two-dimensional case.
The remainder of this chapter is organized as follows. In Sect. 2, we illustrate the Sparse Convolutional Array and the Extended Sparse Convolutional Array. The signal model based on difference co-array is discussed. In Sect. 3, we extend sparse convolutional array to two dimension. Numerical results and discussions are presented in Sect. 3. Finally, Sect. 4 concludes the paper.
2 Methods
2.1 Sparse convolutional array
2.1.1 Basic array construction
Assume N is a non-prime integer, \(N = N_{A}N_{B}\) where \(N_{A}, N_{B} \in N+\). A Sparse Convolutional Array \((N_{A},N_{B})\) can be present as the union of two sets of sensors:
while the sensors of \(U_A\) and \(U_B\) are located at
To further illustrate the sparse convolutional array, we first introduce the concept of difference co-array:
Definition 1
(Difference Co-array) Assume \(\vec {\mathbf {v}}_N\) is a sensor array with N sensors, its difference co-array is defined as the array with its sensors’ location given by
where \(\vec {v}_n\) denotes the location of nth sensor of the original array. The elements of the difference co-array are not necessarily physical sensor, but still can benefit the DOA estimation, as we will illustrate in later sections.
Figure 1 shows an example of the Sparse Convolutional Array of (3, 3) and the corresponding difference co-array.

Sparse convolutional array of (3, 3)
2.1.2 Extended array construction
From Fig. 1, we can see that the regular sparse convolutional array has “hole” in its difference co-array. To perform a difference co-array that follows uniform linear array (ULA), we extend the sparse convolutional array as follow:
while
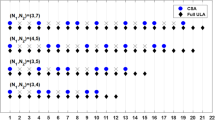
Figure 2 shows an example of an extended sparse convolutional array of (3, 3) and the corresponding difference co-array. We can see from the figure that its difference co-array is a hole-free uniform linear array.

Extended sparse convolutional array of (3, 3)
For a physical sensor array, the number of virtual sensors in its difference co-array directly decides the distinct values of the cross-correlation terms in its received signal’s covariance matrix [4]. Therefore, we illustrate the number of virtual sensors in the difference co-array as follow.
Lemma 2.1
The difference co-array of an extended sparse convolutional array \((N_{A},N_{B})\) is a uniform linear array of \(4N-3\) virtual sensors where \(N = N_{A}N_{B}\).
Proof
The leftmost virtual sensor is performed by the leftmost and rightmost sensors \(-(N-1)\) and \((N-1)\) in \(U_C\), which is \(-2(N-1)\). Similarly, we have the rightmost virtual sensor which is \(2(N-1)\). It is easy to obtain the elements between the leftmost and rightmost sensors are dense.
Therefore, the number of virtual sensors in the difference co-array can be calculated as
For example, in order to perform a uniform linear difference co-array of 33 virtual sensors, an extended sparse convolutional array needs 13 physical sensors. \(\square\)
2.1.3 Signal model
In array signal processing, while calculating the autocorrelation matrix of the received signal, the difference co-array could be formed naturally [17].
Consider a sparse convolutional array \(U(N_A,N_B)\) with \(N = N_AN_B\) sensors placed on a linear grid. The steering vector of this array is of size \(N \times 1\):
where \(d_{i}\) is the location of the ith sensor.
Assume M narrow-band sources are impinging on this array, the array manifold matrix is of size \(N \times M\) and can be written as follow:
where \(\mathbf {a}(\theta _{j})\) is the steering vector corresponding to the direction \(\theta _{j}\) from the jth source.
The received signal \(\mathbf {x}[k]\) of the sensor array can then be formulated as
where \(\mathbf {s}[k] = [s_{1}(k),s_{2}(k),\ldots ,s_{M}(k)]^{T}\) is the \(M \times 1\) source signal vector and \(\mathbf {n}[k]\) is the additive white Gaussian noise with power \(\sigma _{n}^{2}\).
Assume the sources are uncorrelated with each other, the autocorrelation matrix of \(\mathbf {s}[k]\) is diagonal. Therefore, we have
where \(\{\sigma _{j}^{2},j=1,2,\ldots ,M\}\) is the corresponding power of the jth source.
The autocorrelation matrix in (13) is then vectorized to perform the following vector
\(\mathbf {A}_{diff} = \mathbf {A}^{*} \odot \mathbf {A}\) is a \((N*N) \times M\) matrix with \(\odot\) denotes the column-wise Khatri–Rao product [18], where the distinct columns of \(\mathbf {A}^{*} \odot \mathbf {A}\) equal the Kronecker product of the corresponding columns of \(\mathbf {A}^{*}\) and \(\mathbf {A}\), that is
Hence, the element in the jth column of \(\mathbf {A}_{diff}\) is given by
(16) suggests that \(\mathbf {A}_{diff}\) could be treated as a manifold matrix of a new virtual array, with the sensors located at
We can obtain from the definition of difference co-array that this new sensor array is exactly the difference co-array of the original sparse convolutional array [12].
Hence, by comparing (14) with (12), we can say that vector \(\mathbf {z}\) in (14) could be treated as the received signal at this new virtual array, where \(\mathbf {p}=[\sigma _{1}^{2},\sigma _{2}^{2},\ldots ,\sigma _{M}^{2}]^{T}\) is the corresponding \(M \times 1\) source signal vector. The equivalent \((N*N) \times 1\) noise vector becomes \(\sigma _{n}^{2} \overrightarrow{\mathbf {1}}_{n}\), where \(\vec {\mathbf {1}_{n}}=[e_{1}^{T},e_{2}^{T},\ldots ,e_{N}^{T}]^{T}\), with \(e_{i}\) being a \(N \times 1\) vector which has 1 in its ith entry and 0 elsewhere.
Therefore, we can accomplish the DOA estimation to the data in (14) and work with the new virtual array instead of the original physical array. A Khatri–Rao product-based MUSIC algorithm can be applied to do so, as discussed in [14].
2.2 2D sparse convolutional array
2.2.1 Array construction
Assume N is non-prime integer, \(N = N_{A}N_{B}\) where \(N_{A}, N_{B} \in N+\). A \(2-D\) Sparse Convolutional Array \((N_{A},N_{B})\) can be present as follow,
while
+
Similarly, we have 2D extended sparse convolutional array:
while
Figure 3 shows an example of a 2D Extended Sparse Convolutional Array of (2, 3), and Fig. 4 shows the corresponding difference co-array.

2D extended sparse conv array of (2, 3)

Difference co-array of the (2, 3) 2D extended sparse conv array
The number of virtual sensors in the difference co-array for the 2D extended sparse convolutional array is illustrated as follow:
Lemma 3.1
The difference co-array of a 2D Extended Sparse Convolutional Array contains a uniform rectangular array of \((4N-2N_A-1)^{2}\) virtual sensors.
Proof
It is obvious that the virtual sensors on the outline of the rectangular area are performed by the sensors on the outline of \(U_B\) and \(U_C\). Hence, the outline of the rectangular area is \(x=\pm (N-1)+(N_B-1)N_A\) and \(y=\pm (N-1)+(N_B-1)N_A\).
Therefore, the number of virtual sensors in the rectangular area can be calculated as
Notice that we ignored some virtual sensors out of the rectangular area to simplify the calculations. \(\square\)
2.2.2 Signal model
Similar to the signal model in 1D case, we can construct the signal model for 2D Extended sparse convolutional array.
Consider a 2D extended sparse convolutional array \(U(N_A,N_B)\).
Assume there are M uncorrelated narrow-band sources where \((\theta _{j},\phi _{j})\) denotes the direction of the jth source and \(\sigma _{j}\) denotes the corresponding power. The signal received at the sensor array can be formulated as follow:
where \(\mathbf {s}[k] = [s_{1}(k),s_{2}(k),\ldots ,s_{M}(k)]^{T}\) is the \(M \times 1\) source signal vector and \(\mathbf {n}[k]\) is the additive white Gaussian noise with power \(\sigma _{n}^{2}\). \(\mathbf {A}_{U_A}\),\(\mathbf {A}_{U_B}\),\(\mathbf {A}_{U_C}\) are the corresponding array manifold matrix for \(U_A\), \(U_B\) and \(U_C\), and the entries of \(\mathbf {A}\) are given by
where \({x_i,y_i}\) is the coordinate of the ith sensor.
Similarly, the sources are assumed to be uncorrelated with each other, the autocorrelation matrix of \(\mathbf {s}[k]\) is then diagonal, we have
Similar to the signal model of the 1D array, by vectorizing the autocorrelation matrix \(R_{xx}\), the “received” signal of the virtual sensor array can be formulated as:
where
is the array manifold matrix of the new virtual array, whose sensors coordinate is given by
Similarly, vector \(\mathbf {z}\) in (29) could be treated as the received signal at this new virtual array. \(\mathbf {p}=[\sigma _{1}^{2},\sigma _{2}^{2},\ldots ,\sigma _{M}^{2}]^{T}\) is the corresponding \(M \times 1\) source signal vector and \(\sigma _{n}^{2} \overrightarrow{\mathbf {1}}_{n}\) is the corresponding noise vector.
Hence, by implementing MUSIC algorithm, the 2D DOA could be estimated.
3 Numerical results
3.1 Sparse convolutional array
According to the proposed signal model, we then performed Monte Carlo simulations on different sensor arrays. An extended Sparse Convolutional Array (3, 3) as shown in Fig. 2 and a Sparse Convolutional Array (3, 5) are constructed so that the total number of the physical sensors are identical. As a comparison, a nested array is performed, as illustrated in [4]. A uniform linear array is also constructed and simulated as a baseline. Both sensor arrays have 13 physical sensors in their grid. The sources are located at \([-45, -27, -9, 18, 36, 54] degrees\), while the \(SNR=0 dB\), and the number of snapshots is 500.
Figure 5 shows the MUSIC spectrum of the extended sparse convolutional array and sparse convolutional array versus the nested array and uniform linear array. We can obtain from the figure that both four sensor arrays are able to indicate the 6 sources. The uniform linear array has the highest normalized spectrum in dB, meanwhile the sparse convolutional array performs closely to the nested array, and both arrays have lower spectrum compared to the uniform linear array. The proposed extended sparse convolutional array shows the lowest spectrum compared to all the other three arrays.

MUSIC spectrum of the sparse convolutional array, nested array and uniform linear array, SNR = 0 dB, snapshots = 500
In order to demonstrate the proposed array’s ability of detecting closely spaced sources, we then performed the simulation of two pairs of closely placed sources which locate at \([-42.3, -39.6, 27.9, 30.6]\) degrees. And the MUSIC spectrum of the four arrays is plotted in Fig. 6. The result shows that while ULA failed to resolve the two pairs of closely spaced sources, both Nested Array and the two proposed arrays can successfully distinguish the four sources. The performance of the proposed sparse convolutional array and nested array is very close. And the extended sparse convolutional array again shows its lower spectrum compared to the Nested Array.

MUSIC spectrum of the three arrays with closely spaced sources, SNR = 0 dB, snapshots = 500
In the next simulations, we evaluated the performance over various SNR and number of snapshots in terms of RMSE. Since the Extended Sparse Convolutional Array shows a stably better performance than the Sparse Convolutional Array, only Extended Sparse Convolutional Array is considered in the following simulation. The extended sparse convolutional array, nested array and uniform linear array are constructed. Both arrays have 13 physical sensors in their grid, and 8 sources are generated with random locations.
Figure 7 shows the RMSE versus number of snapshots, while SNR = 0 dB. We can obtain from the figure that the RMSE drops for both arrays as the number of snapshots increases, since a larger number of snapshots gives a better approximation of the signal covariance matrix. While the uniform linear array has the highest RMSE in all snapshots range, the proposed extended sparse convolutional array shows its strictly lower RMSE compared to the nested array.

RMSE versus snapshots, SNR = 0 dB
In Fig. 8, the RMSE is plotted versus SNR, while snapshots = 500. The simulation result shows that the RMSE drops for both arrays as the SNR increases, which is as expected. The RMSE of the proposed Extended Sparse Convolutional Array is slightly lower than the RMSE of the nested array, and both two arrays show much better performance than the uniform linear array.

RMSE versus SNR, snapshots = 500
Therefore, we can conclude that the proposed Extended Sparse Convolutional Array has better performance compared to the nested array and the uniform linear array.
3.2 2D sparse convolutional array
We then demonstrated the 2D MUSIC spectrum of the 2D extended sparse convolutional array. With a (2, 3) configuration, the array has 45 physical sensors. 10 sources were generated with random azimuth and elevation angles, while the SNR = 10 dB, and number of snapshots is 1000. The 2D MUSIC spectrum of the 2D extended sparse convolutional array is plotted in Fig. 9.

2D MUSIC spectrum of the extended sparse conv array (2, 3), SNR = 10 dB, snapshots = 1000
The next simulations consider the performance over various SNR for 2D Extended Sparse Convolutional Array. As a comparison, a 2D nested array is constructed, which has 9 sensors in its dense array and 34 sensors in the sparse array, raise a total of 43 physical sensors.
In Fig. 10, the RMSE is plotted versus SNR. As the SNR increases, the RMSE drops for both arrays decrease. And the RMSE of the proposed 2D extended sparse convolutional array is strictly lower than the 2D nested array, raise.

RMSE versus SNR for 2D DOA estimation, snapshots = 1000
4 Conclusion and discussion
In this paper, we have illustrated the Sparse Convolutional Array from the difference co-array point of view. The proposed Sparse Convolutional Array is a union of three groups of physical sensors. We first illustrated the 1D sparse convolutional array and extended sparse convolutional array. By adding sensors on two sides instead of the center, the proposed array shows improved performance while reminds few physical sensors. The signal model has been illustrated, and the simulation results of DOA estimation are provided with MUSIC algorithm implemented. The results indicate that the proposed Sparse Convolutional Array can successfully detect the sources, even when the sources are placed at a close distance. The proposed sensor array shows better performance in terms of RMSE compared to Nested Array and Uniform Linear Array. We then introduced the structure of 2D extended sparse convolutional array and its signal mode. The 2D MUSIC spectrum was demonstrated, and the RMSE is simulated and compared.
As for the future work, mutual coupling is considered to be demonstrated since it reflects the electromagnetic interaction between the sensors in an array. Mutual coupling changes the current magnitude, phase, and distribution on each sensor elements from their free-space value [19].
Many researchers have been done regarding to the modeling of mutual coupling, for example [20,21,22]. In [21], the author shows that with a proper mutual coupling model, the performance could be improved. In the proposed Extended Sparse Convolutional Array, the physical sensors are more distributed. Hence, we are expecting a more obvious improvement compared to the uniform linear array or nested array.
Availability of data and materials
Not applicable.
Abbreviations
- DOA:
-
Direction-of-arrival
- MUSIC:
-
Multiple signal classification
- UWSAN:
-
Underwater non-uniform sensor array networks
- MIMO:
-
Multi-input multi-output
- MRA:
-
Minimum redundancy array
- KR:
-
Khatri–Rao
- COBA:
-
Convolutional beamforming algorithm
- DAS:
-
Delay and sum
- RMSE:
-
Root mean square error
References
R. Schmidt, Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 34(3), 276–280 (1986)
A. Moffet, Minimum-redundancy linear arrays. IEEE Trans. Antennas Propag. 16(2), 172–175 (1968)
P.P. Vaidyanathan, P. Pal, Sparse sensing with co-prime samplers and arrays. IEEE Trans. Signal Process. 59(2), 573–586 (2011)
P. Pal, P.P. Vaidyanathan, Nested arrays: a novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Process. 58(8), 4167–4181 (2010). https://doi.org/10.1109/TSP.2010.2049264
H. Liang, Q. Liang, Increasing capacity of multi-cell cooperative cellular networks with coprime deployment, in Communications, Signal Processing, and Systems (Springer, 2018), pp. 267–274
N. Wu, Q. Liang, Underwater DoA estimation based on nested array, in MILCOM 2015—2015 IEEE Military Communications Conference (2015), pp. 216–221. https://doi.org/10.1109/MILCOM.2015.7357445
F. Zhu, N. Wu, Q. Liang, Channel estimation for massive MIMO with 2D nested array deployment. Phys. Commun. 25, 432–437 (2017). https://doi.org/10.1016/j.phycom.2017.08.009
P. Pal, P.P. Vaidyanathan, Nested arrays in two dimensions, part II: application in two dimensional array processing. IEEE Trans. Signal Process. 60(9), 4706–4718 (2012). https://doi.org/10.1109/TSP.2012.2203815
P. Vaidyanathan, P. Pal, Theory of sparse coprime sensing in multiple dimensions. IEEE Trans. Signal Process. 59(8), 3592–3608 (2011)
F. Harabi, A. Gharsallah, S. Marcos, Three-dimensional antennas array for the estimation of direction of arrival. IET Microw. Antennas Propag. 3(5), 843–849 (2009)
R.A. Haubrich, Array design. Bull. Seismol. Soc. Am. 58(3), 977–991 (1968)
R.T. Hoctor, S.A. Kassam, The unifying role of the coarray in aperture synthesis for coherent and incoherent imaging. Proc. IEEE 78(4), 735–752 (1990)
R.J. Kozick, S.A. Kassam, Coarray synthesis with circular and elliptical boundary arrays. IEEE Trans. Image Process. 1(3), 391–405 (1992)
W. Ma, T. Hsieh, C. Chi, DoA estimation of quasi-stationary signals via Khatri–Rao subspace, in 2009 IEEE International Conference on Acoustics, Speech and Signal Processing (2009), pp. 2165–2168
R. Cohen, Y.C. Eldar, Sparse convolutional beamforming for ultrasound imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 65(12), 2390–2406 (2018). https://doi.org/10.1109/TUFFC.2018.2874256
E. Stride, C. Coussios, Cavitation and contrast: the use of bubbles in ultrasound imaging and therapy. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 224(2), 171–191 (2010)
X. Wang, X. Wang, X. Lin, Co-prime array processing with sum and difference co-array, in 2015 49th Asilomar Conference on Signals, Systems and Computers (2015), pp. 380–384
H.D. Macedo, J.N. Oliveira, A linear algebra approach to OLAP. Form. Asp. Comput. 27(2), 283–307 (2015)
W.L. Stutzman, G.A. Thiele, Antenna Theory and Design (Wiley, New York, 2012)
B. Friedlander, A.J. Weiss, Direction finding in the presence of mutual coupling. IEEE Trans. Antennas Propag. 39(3), 273–284 (1991)
B. Friedlander, A sensitivity analysis of the music algorithm. IEEE Trans. Acoust. Speech Signal Process. 38(10), 1740–1751 (1990)
T. Svantesson, Mutual coupling compensation using subspace fitting, in Proceedings of the 2000 IEEE Sensor Array and Multichannel Signal Processing Workshop. SAM 2000 (Cat. No. 00EX410) (IEEE, 2000), pp. 494–498
Acknowledgements
Not applicable.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
All authors have contributed toward this work as well as in compilation of this manuscript. All authors read and approved the final manuscript.
Zikai Wang received his BS degree from Beijing University of Posts and Telecommunications (BUPT) in 2015 and Ph.D. degree from University of Texas at Arlington in 2021. He is currently an engineer at Beijing R &D Center, the 54th Research institute of China Electronics Technology Group (CETC). His current research interests include array signal processing, wireless communication, and information system.
Yun Liu was born in Heze, Shandong Province, China, in 1983. She received the Ph.D. degree in communication and information engineering from University of Electronic Science and Technology of China (UESTC), in 2013. She is currently a senior engineer of communication and networking at Beijing R &D Center, The 54th Research Institute of China Electronics Technology Group (CETC). Her research interests concern 5G & 6G wireless communication theory and satellite mobile communication, including OFDM technologies, Massive MIMO technology, cognitive radio spectrum sensing technology and resource allocation and 5G non terrestrial networks technology and applications.
Ruiliang Song received his B.E. and Ph.D. degrees in microelectronics and solid state electronics from Tianjin University, Tianjin, P.R. China in 2006 and 2009, respectively. From 2009–2011, he worked as post-doctor research fellow with Laboratory of CIGS Thin Film Solar Cells, Institute of Optoelectronic Thin Film Devices and Technology, Nankai University, Tianjin, P.R. China. Since 2011, he has been a senior engineer with Beijing R &D Center, The 54th Research Institute of China Electronics Technology Group (CETC). His current research interests include space terahertz communication system, terahertz devices and high data rate transmission in 6G application.
Ning Liu received the Ph.D. degree in electromagnetic and microwave technology from the Beijing University of Posts and Telecommunications, Beijing, China, in 2012. Since 2012, he has been a Senior Engineer with the Beijing Research and Development Center, The 54th Research Institute of China Electronics Technology Group (CETC). His current research interests include phased array antennas, massive multi-in multi-out (MIMO), and terahertz communication systems.
Qilian Liang is a Distinguished University Professor at the Department of Electrical Engineering, University of Texas at Arlington (UTA). He received his B.S. degree from Wuhan University in 1993, M.S. degree from Beijing University of Posts and Telecommunications (BUPT) in 1996, and Ph.D. degree from University of Southern California (USC) in 2000, all in Electrical Engineering. Prior to joining the faculty of the University of Texas at Arlington in August 2002, he was a Member of Technical Staff in Hughes Network Systems Inc at San Diego, California. His research interests include wireless sensor networks, radar and sonar sensor networks, wireless communications and networks, signal processing, machine learning, etc. Dr. Liang has published more than 320 journal and conference papers and 7 book chapters. He received 2002 IEEE Transactions on Fuzzy Systems Outstanding Paper Award, 2003 U.S. Office of Naval Research (ONR) Young Investigator Award, 2005 UTA College of Engineering Outstanding Young Faculty Award, 2007, 2009, 2010 U.S. Air Force Summer Faculty Fellowship Program Award, 2012 UTA College of Engineering Excellence in Research Award, and 2013 UTA Outstanding Research Achievement Award, and was inducted into UTA Academy of Distinguished Scholars in 2015. He is a Fellow of the IEEE.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Consent for publication
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wang, Z., Liu, Y., Song, R. et al. Sparse convolutional array for DOA estimation. EURASIP J. Adv. Signal Process. 2022, 102 (2022). https://doi.org/10.1186/s13634-022-00904-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13634-022-00904-0