
Abstract
Purpose
This paper investigates an analytical approximate solution of a fourth-order differential equation with nonlinear boundary conditions modeling beams on elastic foundations using iterative reproducing kernel method.
Methods
The solution obtained using the method takes the form of a convergent series with easily computable components. However, the reproducing kernel method can not be used directly to solve the problems since there is no method of obtaining a reproducing kernel satisfying nonlinear boundary conditions. The aim of this paper is to fill this gap.
Results
Several illustrative examples are given to demonstrate the effectiveness of the present method.
Conclusions
Results obtained using the scheme presented here show that the numerical scheme is very effective and convenient for the beam equation with third-order nonlinear boundary conditions.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Background
This paper discusses the analytical approximate solution for fourth-order equations with nonlinear boundary conditions involving third-order derivatives which appears in the study of deformations of elastic beams on elastic bearings:
where and .
Existence and multiplicity results for this kind of problem were studied recently by Grossinho and coworker [1–3]. However, it is very difficult to obtain its numerical solution due to the appearance of third-order nonlinear boundary conditions. Recently, Ma and Silva [4] proposed an iterative method for solving Equation 1.1.
In this paper, we will apply the iterative reproducing kernel method (IRKM) presented by Geng and Cui [5, 6] to the beam equation (Equation 1.1).
Reproducing kernel theory has important application in numerical analysis, differential equation, probability and statistics, and so on [5–17]. Recently, using the RKM, the authors discussed two-point boundary value problems and periodic boundary value problems. For fourth-order equations with nonlinear boundary conditions, however, it can not be applied directly since there is no method of obtaining a reproducing kernel satisfying nonlinear boundary conditions. The aim of this paper is to fill this gap. We will show how IRKM can be used to solve Equation 1.1.
The rest of the paper is organized as follows: An equivalent equation is obtained in the next section. The IRKM is applied to the equivalent equation in the ‘IRKM for Equation 2.1’ section. The numerical examples are presented in the ‘Numerical experiments’ section. The ‘Conclusions’ section ends this paper with a brief conclusion.
Results and discussion
Numerical experiments
In this section, two numerical examples are studied to demonstrate the accuracy of the present method. The examples are computed using Mathematica 5.0. Results obtained by the present method are compared with those by the method in [4] and show that the present method is effective for the beam equation (Equation 1.1).
Example 4.1
We consider the problem (Equation 1.1) with
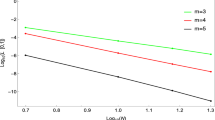
The exact solution is given by . Using the present method, choosing initial approximation and taking ; ; and , where , the maximum absolute errors = between the approximate solution and the exact solution are given in Table 1.
Example 4.2
We consider the problem (Equation 1.1) with
The exact solution is given by . Using the present method, choosing initial approximation and taking ; ; and , where , the maximum absolute errors = between the approximate solution and the exact solution are given in Table 2.
Conclusions
In this paper, we apply IRKM to fourth-order boundary value problems with nonlinear boundary conditions arising in the study of deformations of elastic beams on elastic bearings and obtain approximate solutions with a high degree of accuracy. Results of numerical experiments show that IRKM is an accurate and reliable analytical technique for this class of fourth-order boundary value problems with a third-order nonlinear boundary condition.
Methods
The equivalent equation of 1.1
Equation 1.1 can not be solved directly using IRKM since it is impossible to obtain a reproducing kernel satisfying nonlinear boundary conditions of Equation 1.1. So, we will make great efforts to convert Equation 1.1 into an equivalent equation, which is easily solved using IRKM.
Integrating both sides of Equation 1.1 from 1 to x and substituting leads to:
where .
Obviously, Equations 1.1 and 2.1 are equivalent. Therefore, it suffices for us to solve Equation 2.1.
IRKM for Equation 2.1
Equation 2.1 can be solved using IRKM presented by Geng [5]. In order to apply IRKM, first, we construct a reproducing kernel space in which every function satisfies the boundary conditions of Equation 2.1.
Reproducing kernel Hilbert space is defined as , , are absolutely continuous real value functions, . The inner product and norm in are given, respectively, by
and
According to [5–7], it is easy to obtain its reproducing kernel
where .
In Equation 2.1, put , it is clear that is a bounded linear operator. Put and , where is the RK of and is the adjoint operator of L. The orthonormal system of can be derived from the Gram-Schmidt orthogonalization process of
Through the RKM presented in [5–7], we have the following theorems:
Theorem 3.1
For Equation 2.1, if is dense on , then is the complete system of and .
Theorem 3.2
If is dense on and the solution of Equation 2.1 is unique, then the solution of Equation 2.1 satisfies the form
Remark: Case (1): Equation 2.1 is linear, that is, . Then, the analytical solution to Equation 2.1 can be obtained directly from Equation 3.3.Case (2): Equation 2.1 is nonlinear. In this case, the approximate solution to Equation 2.1 can be obtained using the following method
According to Equation 3.3, we construct the following iteration formula:
For the proof of convergence of the iterative formula (Equation 3.4), see [5].
Remark:
In the iteration process of Equation 3.4, we can guarantee that the approximation always satisfies the boundary conditions of Equation 2.1.
Now, the approximate solution can be obtained by finitely taking many terms in the series representation of and
References
Agarwal RP, Chow YM: Iterative methods for a fourth order boundary value problem. J. Comput. Appl. Math. 1984, 10: 203.
Feireisl E: Non-zero time periodic solutions to an equation of Petrovsky type with nonlinear boundary conditions: slow oscillations of beams on elastic bearings. An. Sc. Norm. Super. Pisa 1993, 20: 133.
Humphreys LD: Numerical mountain pass solutions of a suspension bridge equation. Nonlinear Anal. 1997, 28: 1811.
Ma TF, Silva JD: Iterative solutions for a beam equation with nonlinear boundary conditions of third order. Applied Mathematics and Computation 2004, 159: 11.
Geng FZ: A new reproducing kernel Hilbert space method for solving nonlinear fourth-order boundary value problems. Applied Mathematics and Computation 2009, 213: 163.
Geng FZ, Cui MG: Solving singular nonlinear second-order periodic boundary value problems in the reproducing kernel space. Applied Mathematics and Computation 2007, 192: 389.
Cui MG, Lin YZ: Nonlinear Numerical Analysis in Reproducing Kernel Space. Nova Science Pub Inc, Hauppauge; 2009.
Berlinet A, Thomas-Agnan C: Reproducing Kernel Hilbert Space in Probability and Statistics. Kluwer Academic Publishers, Boston; 2004.
Daniel A (ed): Reproducing Kernel Spaces and Applications. Springer, Basel; 2003.
Cui MG, Geng FZ: Solving singular two-point boundary value problem in reproducing kernel space. Journal of Computational and Applied Mathematics 2007, 205: 6.
Geng FZ, Cui MG: Solving a nonlinear system of second order boundary value problems. Journal of Mathematical Analysis and Applications 2007, 327: 1167.
Du J, Cui MG: Constructive approximation of solution for fourth-order nonlinear boundary value problems. Mathematical Methods in the Applied Sciences 2009, 32: 723.
Yao HM, Lin YZ: Solving singular boundary-value problems of higher even-order. Journal of Computational and Applied Mathematics 2009, 223: 703.
Li XY, Geng FZ: Solving a class of singular boundary value problems in the reproducing kernel Hilbert space. Mathematical Sciences 2008, 2: 77.
Geng FZ, Shen F: Solving a Volterra integral equation with weakly singular kernel in the reproducing kernel space. Mathematical Sciences 2010, 4: 159.
Geng FZ: Analytic approximations of solutions to systems of ordinary differential equations with variable coefficients. Mathematical Sciences 2009, 3: 133.
Li CL, Cui MG: The exact solution for solving a class nonlinear operator equations in the reproducing kernel space. Applied Mathematics and Computation 2003, 143: 393.
Acknowledgements
The author would like to thank the unknown referees for their careful reading and helpful comments. The work was supported by the National Natural Science Foundation of China (grant no. 11026200) and the Special Funds of the National Natural Science Foundation of China (grant no. 11141003).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declare that they have no competing interests.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Geng, F. Iterative reproducing kernel method for a beam equation with third-order nonlinear boundary conditions. Math Sci 6, 1 (2012). https://doi.org/10.1186/2251-7456-6-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/2251-7456-6-1