
Abstract
The (3+1)-dimensional variable coefficient Kadomtsev-Petviashvilli equation describes the dynamics of solitons and nonlinear waves in plasmas and superfluids. Based on computerized symbolic computation and extended variable coefficient homogeneous balance method, several families of exact soliton-like solutions, rational solutions, and auto-Bäcklund transformation are presented. With the use of the auto-BT and the ε-expansion method, we can obtain a soliton-like solution including N-solitary wave of the (3+1)-dimensional Kadomtsev-Petviashvilli equation with variable coefficients. Especially, we get a soliton-like solution including two-solitary waves as an illustrative example in detail.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
More and more physical structures of nonlinear dispersive equations have attracted a lot of interests due to their applications in many important scientific problems. With the help of symbolic computation[1–13], various methods have been developed for studying these physical structures, such as the inverse scattering method, Bäcklund transformation, Hirota bilinear forms, the tanh-sech method, the sine-cosine method, truncated Painlevé expansion method, similarity reduction method, and so on.
There has been considerable interest in the Kadomtsev-Petviashvili (KP) equation, which arises in many physical applications including shallow water waves and plasma physics. The KP equation describes the evolution of small amplitude surface waves, namely weak nonlinearity, weak dispersion, and propagation in one direction (the x-axis) with the waves weakly perturbed in the y direction[14]. In fact, the KP equation is a completely integrable soliton equation, which generally possesses almost all of the following remarkable properties: the existence of multisoliton solutions, an infinite number of independent conservation laws and symmetries, a bi-Hamiltonian representation, a prolongation structure, a Lax pair, Bäcklund transformations, the Hirota bilinear representation, and the Painlevé property, etc.[15].
Here, we consider the (3+1)-dimensional variable coefficient KP equation in the form[15]
where λ(t), μ(t), γ(t), and δ(t) are all functions of t only with λ(t) ≠0, μ(t) ≠ 0. If δ(t) = 0, Equation 1 becomes the (2+1)-dimensional KP equation. If γ(t) = δ(t) = 0, Equation 1 becomes the Korteweg-de Vries (KdV) equation. When λ(t), μ(t), γ(t), and δ(t) are arbitrary constants with λ(t) = 6, μ(t) = 1, Equation 1 becomes the (3+1)-dimensional KP equation, which describes the dynamics of solitons and nonlinear waves in plasmas and super fluids.
Zhang and coworkers[16] obtained an auto-Bäcklund transformation (BT) and the exact solution for the (3+1)-dimensional variable coefficient KP equation using the homogeneous balance principle. In virtue of the generalized variable coefficient algebraic method, Zhao[17] derived several new families of exact solutions of physical interest for the (3+1)-dimensional variable coefficient KP equation.
The structure of the present paper is as follows. The section ‘An extended variable coefficient homogeneous balance method’ presents the developing of the extended variable coefficient homogeneous balance (EvcHB) to solve the (3+1) dimensional equation. In section ‘Auto-Bäcklund transformation,’ an auto-BT of Equation 1 is obtained with the use of the EvcHB method. In section ‘Soliton-type solutions,’ using the auto-BT, we can derive the soliton-type solution of Equation 1. In section ‘ε-expansion method and two-solitary waves solutions,’ we discuss our method and results in detail.
An extended variable coefficient homogeneous balance method
An EvcHB has been proposed in[18]. In this paper, we will develop the EvcHB to solve the (3+1) dimensional equation and use Equation 1 as an illustration for the variable coefficient nonlinear evolution equations under investigation. Now, we describe what is the EvcHB method in solving the (3+1) dimensional equation and how to use it to look for the auto-BT and special exact solutions for the given (3+1) dimensional partial differential equation:
where P is in general a polynomial function of its arguments, and the subscripts denote the partial derivatives.
First step: we assume a general transformation:
where ψ(y,z,t) is a differentiable function; j, k, m, and l are integers; u0(x,y,z,t) is a special solution of Equation 2; f(ξ,η) is a function to be determined later.
Second step: by balancing the terms with the highest powers of the differential coefficients of ξ x , we can obtain the values of j, k, m, and l. Substituting (3) into Equation 2, equating the coefficients of the highest powers of ξ x to zero yields the value of f(ξ,η).
Third step: equating the coefficients of various partial derivatives of f(ξ,η) to zero, the corresponding auto-BT of Equation 2 can been derived.
Though the method is entirely algorithmic and it often has many tedious algebraic and auxiliary calculations which are virtually unmanageable manually, we can concisely and straightforwardly simplify them with the development of the symbolic computation systems[1–13].
Auto-Bäcklund transformation
In terms of the second step of the EvcHB method, we can obtain
In the following analysis, we will stay with the following conditions
Substituting (4) and (5) into Equation 1 we obtain
Setting the coefficient of in (6) to zero yields an ordinary differentiable equation (ODE) for f; namely
which admits the solution
where δ(η) and σ(η) are differential functions. According to (8), we obtain
According to the third step, substituting (7) and (9) into (6) yields a linear polynomial of f ξ , f ξ ξ ,…. Equating the coefficients of f ξ , f ξ ξ ,… to zero, holds
From (4) and (8), the new auto-BT for the (3+1)-dimensional variable coefficient KP equation can be written as follows
with σ(η), δ(η), and ξ satisfying Equations 10 to 15. The meaning of auto-BT consisted of 10 to 16 is that if u0(x,y,z,t) be a special solution of Equation 1, then the expression (16) is another solution of Equation 1.
Soliton-type solutions
Now, we use the new auto-BT consisted of Equations 10 to 16 to obtain the exact solutions of Equation 1. Starting from Equation 10, we need to investigate different cases as follows
Case 1: ξ xx = 0
In this case, assume that
where φ1(y,z,t) and φ2(y,z,t) are differentiable functions. Substituting (17) into (11) yields
Substituting (17) and (18) into (12), we get
Equations 13 and 14 equate to zero naturally. So, we derive a family of rational solutions for Equation 1 as
with φ1 = φ1(y,z,t), φ2 = φ2(y,z,t) and u0(x,y,z,t) satisfying constraint (19) and (15).
Case 2: σ(η) = 0.
Aiming at the exact solutions, we substitute a trial solution
into Equations 11 to 15, where α(t), λ(y,z,t), and β(y,z,t) are differentiable functions. Substituting (21) into (11) yields
Substituting (21) and (22) into (12), we get
Then, Equations 13 and 14 equate to zero naturally. Collecting all above terms, we can derive the general solutions of Equation 1 as follows
All parameters have been explained before. u0(x,y,z,t), α(t), λ = λ(y,z,t), and β = β(y,z,t) satisfying constraint (15) and (23). Solution (24) contains more arbitrary parameters than the solution obtained before in[16] and[17].
ε-expansion method and two-solitary waves solutions
In order to obtain two-solitary waves solutions of Equation 1, we use the auto-BT consisted of Equations 10 to 15 to obtain a special single solitary wave solution of Equation 1. So, for simplicity, we take u0(x,y,z,t) = 0, σ(η) = 0 and a direct assuming
where c is an arbitrary constant, h(y,z,t) are functions to be determined later. Substituting (25) into Equations 10 to 14, we hold
Substituting (25) into Equation 16 yields a soliton-like solution containing single solitary wave of Equation 1
where θ is expressed by (25), c and h = h(y,z,t) must satisfy Equation 26.
Next, we use the ε-expansion method[18–20] and assume that the solution of Equations 10 to 14 is of the form
where w i = w i (x,y,z,t) (i = 1, 2, 3, …) to be determined later, ε be a small parameter. Substituting (28) into Equations 10 to 14. Equating the coefficient of εk (k = 1, 2, 3, …) to zero yields a set of PDEs for w k (k = 1, 2, 3,…)
and so on, to be solved.
For simplicity, we take a special solution of Equation 29 in the form
where c i and h i (y,z,t) satisfy Equation 26, N, a positive integer. Then, w2 includes only all terms g i g j with i ≠ j; w3 includes only all terms g i g j g k with i ≠ j ≠ k; and so on. Thus the sequence w k terminates at w N ∝ g1g2 ⋯ g N , then the series (28) truncates. So, we have an exact solution (ε = 1) of Equations 10 to 15 in the form
Substituting (33) and u0(x,y,z,t) = 0 into (16), we can obtain a soliton-like solution containing N-solitary wave of Equation 1; here, N-solitary wave means the interaction of N-solitary waves.
As an illustrative example, we look for a soliton-like solution containing two-solitary wave of Equation 1 in detail. Getting
for a solution of Equation 29. Substituting (34) into the right hand side of Equation 30, which admits a solution
Substituting (34) and (35) into the right hand side of Equation 31 yields
we may take w3 = 0 for its solution, hence w n = 0 (n ≥ 3), therefore the series (28) truncates. Substituting (34), (35) and w n = 0 (n ≥ 3) into (28) (ε = 1) yields an exact solution of Equations 10 to 13
Substituting (37) and u0(x,y,z,t) = 0 into (16), a soliton-like solution containing two-solitary wave of Equation 1 can be written as
which represents the interaction of two-solitary waves.
In principle, families of the three-solitary wave, exact analytic solutions, and those for more solutions could be constructed similar to the above. However, the situations would become extremely complicated.
Discussions
In this letter, we have extended to Equation 1 an EvcHB method presented in[21–28], performed symbolic computation, and obtained a new auto-Bäcklund transformation and a families of the exact, analytic soliton-type solutions, two-solitary wave solution for Equation 1, which are Expression (24) and (38). The method can be implemented in the symbolic computation systems such as Mathematica or MatLab in Appendix A.
Of optical and physical interests, let us discuss the following special cases of our solutions which have appeared in the literature:
-
(1)
An interesting case of Expression (24), with λ = 1, , β = ϕ 5(t) y 2 + ϕ 6(t) y + [ϕ 3(t) y + ϕ 4(t)] z + ϕ 7(t), is the set of the nebulonic solitons,
(39)
where u = u(x,y,z,t), ϕ i (t)(i = 1,2,3,4,5,6,7)is the arbitrary function. We also find that
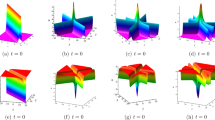
which has not been given in Refs.[16] and[17]. A family of exact analytic, nebulonic solutions (25) is shown in Figures1,2, and3.

The nebulonic solution (25), where μ ( t ) = t2, γ ( t ) = ϕ 5 ( t ) = ϕ 6 ( t ) = t , ϕ 7 ( t ) = cost , ϕ 3 ( t ) = ϕ 4 ( t ) = 0 , t = −1.6.

The nebulonic solution (25), where t = −1.8.

The nebulonic solution (25), where t = −2.
-
(2)
Solution (3.3) in [16] is a special case of Expression (24).
-
(3)
The soliton-type solution for (2+1) dimensional KP equation,
in[16] is a special case of Expression (24), with α(t) = l, β = m y + ϕ8(t) and δ(t) = 0, where l and m are arbitrary constants, ϕ8(t) is arbitrary function. A soliton-type solution is shown in Figure4. which has been known in[29].

The soliton-type solution.
-
(4)
Figures 5, 6, 7, and 8 with the data of parameters illustrated in their captions, supply for us the propagating and interactions of the two-solitary wave in the different time.

The two-solitary wave solution (38), where c 1 = 1, h 1 ( y,z,t ) = − t − 2 + y − 2 y2, c 2 = 2, h 2 ( y,z,t ) = − t + 2 y − 3 y2, t = −6.

The two-solitary wave solution (38), where t = 2 in Figure 5.

The two-solitary wave solution (38), where t = 6 in Figure 5.

The two-solitary wave solution (38). Where c1 = 1, h1(y,z,t) = −t − 2 + 2 y − 2 y2, c2 = 2, h2(y,z,t) = t + 2 y − 3 y2, t = −50.
References
Liu JG, Li YZ: Auto-Bäcklund transformation and soliton-typed solutions of the generalized variable-coefficient KP equation (in Chinese). Chin. Phys. Lett 2006,23(7):1670–1673. 10.1088/0256-307X/23/7/004
Khater A, Callebaut D, Ibrahim R: Bäcklund transformations and Painleve analysis: exact soliton solutions for the unstable nonlinear Schrodinger equation modeling electron beam plasma. Phys. Plasmas 1998,5(2):395–400. 10.1063/1.872723
Zhang HQ, Xie HD, Lu B: A symbolic computation method to decide the completeness of the solutions to the system of linear partial differential equations. Appl. Math. Mech 2002,23(10):1134–1139. 10.1007/BF02437661
Liu JG, Li YZ: Transformations for the variable coefficient Ginzburg-Landau equation with symbolic computation. J. China Univ, Posts Telecommunications 2006,13(3):98–101. 10.1016/S1005-8885(07)60020-X
Anjan B, Arjuna R: 1-soliton solution of Kadomtsev-Petviasvili equation with power law nonlinearty. Appl. Math. Comp 2009,214(2):645–647. 10.1016/j.amc.2009.04.001
Anjan B, Arjuna R: Topological 1-soliton solution of Kadomtsev-Petviashvili equation with power law nonlinearity. Appl. Math. Comp 2010,217(4):1771–1773. 10.1016/j.amc.2009.09.042
Abdullahi RA, Chaudry MK, Anjan B: Solutions of Kadomtsev-Petviashvili equation with power law nonlinearity in 3+1 dimensions. Math. Method. Appl. Sci 2011,34(5):532–543. 10.1002/mma.1378
Ghodrat E, Nazila Y, Houria T, Anjan B: Exact solutions of the (2 + 1)-dimensional Camassa-Holm Kadomtsev-Petviashvili equation. Nonlinear Anal.: Model. Control 2012,17(3):280–296.
Anwar JMJ, Marko P, Anjan B: Soliton solutions for nonlinear Calaogero-Degasperis and potential Kadomtsev-Petviashvili equation. Comp. Math. Appl 2011,62(6):2621–2628. 10.1016/j.camwa.2011.07.075
Houria T, Benjamin JMS, Hayat T, Omar M. A, Anjan B: Shock wave solutions of the variants of the Kadomtsev-Petviashvili equation. Can. J. Phys 2011,89(9):979–984. 10.1139/p11-083
Ghodrat E, Nazila YF, Bhrawy AH, Sachin K, Houria T, Ahmet Y, Anjan B: Solitons and other solutions to the (3+1)-dimensional extended Kadomtsev-Petviashvili equation with power law nonlinearity. Rom. Rep. Phys 2013,65(1):27–62.
Anjan B: 1-Soliton solution of the generalized Camassa-Holm Kadomtsev-Petviashvili equation. Commun. Nonlinear. Sci 2009,14(6):2524–2527. 10.1016/j.cnsns.2008.09.023
Glendinming S, Dixit S, Hammel B, Kalantar D, Key M, Kilkenny J, Knauer J, Pennington D, Remington B, Wallace R, Weber S: Measurement of a dispersion curve for linear-regime Rayleigh-Taylor growth rates in laser-driven planar targets. Phys. Rev. Lett 1997,78(17):3318–3321. 10.1103/PhysRevLett.78.3318
Güngör F, Winternitz P: Generalized Kadomtsev-Petviashvili equation with an infinite-dimensional symmetry algebra. J. Math. Anal. Appl 2002,276(1):314–328. 10.1016/S0022-247X(02)00445-6
Clarkson PA: Painleve analysis and the complete integrability of a generalized variable-coefficient Kadomtsev-Petviashvili equation. J. Appl. Math 1990,44(1):27–53.
Zhang JL, Wang ML, Cheng DL, Wang YM, Fang ZD: Backlund transformation and exact solution to Kadomtsev-Petviashvili equation with variable coefficients. Northeast. Math. J 2002,18(4):s330.
Zhao H, Bai CL: New doubly periodic and multiple soliton solutions of the generalized (3 + 1)-dimensional Kadomtsev-Petviashvilli equation with variable coefficients. Chaos, Solitons Fractals 2006,30(1):217–226. 10.1016/j.chaos.2005.08.148
Hirota R: Exact solution of the Korteweg de Vries equation for multiple collisions of solitons. Phys. Rev. Lett 1971, 27: 1192–1194. 10.1103/PhysRevLett.27.1192
Hirota R, Junkichi S: N-soliton solutions of model equations for shallow water waves. J. Phys. Soc. Japan 1976, 40: 611–612. 10.1143/JPSJ.40.611
Li YZ, Liu JG: Auto-Backlund transformation and new exact solutions of the generalized variable-coefficients 2-dimensional Korteweg-de Vries model. Phys. Plasmas 2007,14(2):023502. 10.1063/1.2435324
Sinha SC, Gourdon E, Zhang Y: Control of time-periodic systems via symbolic computation with application to chaos control. Commun. Nonlinear Sci. Numerical Simul 2005,10(8):835–854. 10.1016/j.cnsns.2004.06.001
Zhao XQ, Zhi HY, Zhang HQ: Improved Jacobi-function method with symbolic computation to construct new double-periodic solutions for the generalized Ito system. Chaos, Solitons Fractals 2006.,28(1):
Birk G: The onset of Rayleigh-Taylor instabilities in magnetized partially ionized dense dusty plasmas. Phys. Plasmas 2002,9(3):745–747. 10.1063/1.1445752
Nakkeeran K, Moubissi A, Dinda P, Wabnitz S: Analytical method for designing dispersion-managed fiber systems. Opt. Lett 2001,26(20):1544–1546. 10.1364/OL.26.001544
Barnett MP, Capitani JF, Gathen JVZ, Gerhard J: Symbolic calculation in chemistry: selected examples. Int. J. Quantum. Chem 2004,100(2):80–104. 10.1002/qua.20097
Gao YT, Tian B: Cylindrical Kadomtsev-Petviashvili model, nebulons and symbolic computation for cosmic dust ion-acoustic waves. Phys. Lett. A 2006,349(5):314–319. 10.1016/j.physleta.2005.09.040
Ursescu D, Tomaselli M, Kuehl T, Fritzsche S: Symbolic algorithms for the computation of Moshinsky brackets and nuclear matrix elements. Comput. Phys. Commun 2005,173(3):140–161. 10.1016/j.cpc.2004.09.012
Juan C, Ferenc S, Jean CH, Jean LC: Symbolic computation in discrete optimization: SCDO algorithm. Nonlinear Anal. 2005, 63: 605–615. 10.1016/j.na.2005.03.056
Biswajit S, Rajkumar R: Nonplanar ion acoustic waves with nonthermal electrons. Earth. Moon. Planets 2012, 109: 77–89. 10.1007/s11038-012-9405-z
Acknowledgements
We would like to thank the editor and the referee for their timely and valuable comments.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
ZFZ participated in the design of the study and drafted the manuscript. JGL conceived of the study and participated in its design and coordination. Both authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Liu, JG., Zeng, Z. Auto-Bäcklund transformation and new exact solutions of the (3+1)-dimensional KP equation with variable coefficients. J Theor Appl Phys 7, 49 (2013). https://doi.org/10.1186/2251-7235-7-49
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/2251-7235-7-49