
Abstract
Except some empirical methods, which have been developed in the past, no analytical method exists to describe the evolutionary behavior of a shock wave without limiting its strength. In this paper, we have derived a system of transport equations for the shock strength and the induced continuity. We generate a completely intrinsic description of plane, cylindrical, and spherical shock waves of weak strength, propagating into a non-ideal gas. It is shown that for a weak shock, the disturbance evolves like an acceleration wave at the leading order. For a weak shock, we may assume that . We have considered a case when the effect of the first order-induced discontinuity or the disturbances that overtook the shock from behind are strong, i.e., [p x ] = O(1). The evolutionary behavior of the weak shocks in a non-ideal gas is described using the truncation approximation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The study of the evolutionary behavior of non-linear waves in diverse branches of continuum mechanics has long been a subject of great interest from both mathematical and physical points of view. A rigorous mathematical approach to describe the kinematics of a shock has been proposed by Maslov [1] using the theory of generalized functions. Evolutionary behavior of shocks in fluids, using singular surface theory, has been discussed by Grinfeld [2], Anile [3], Straughan [4, 5], Jordan [6, 7], Radha et al. [8], and Pandey and Sharma [9]. Using a procedure based on the kinematics of one-dimensional motion, Sharma and Radha [10], Batt and Ravindran [11], and Sharma and Venkatraman [12] have studied the evolutionary behavior of shocks. In the present paper, we are concerned with planar, axially, and radially symmetric flows of a polytropic non-ideal gas behind a shock front which is propagating into a uniform region at rest; here, we employ the singular surface theory to derive asymptotic decay laws for shocks and the accompanying first-order discontinuity. Modulated simple wave theories have been developed by several authors; papers by Parker [13, 14] and an extensive review by Seymour and Mortell [15] are particularly illuminating.
The present paper is organized as follows: After setting up the basic equations and jump conditions across a shock of arbitrary strength, we devote ‘Transport equation for shock strength using singular surface theory’ and ‘Transport equation for the unknown term [p x ]’ sections to the derivation of transport equations for the variation of jumps in pressure and their space derivatives; the equations are coupled with those involving jumps in higher order space derivatives of pressure. In section ‘Evolution laws for weak shocks’, we analyze the pair of coupled transport equations for the shock strength and accompanying first- and second-order discontinuities; the shock strength is assumed to be small, but the associated first-order jump discontinuity may be finite or small. Under these assumptions, the transport equations are solved exactly to the leading order once the strength of the accompanying second order discontinuity is neglected, and the evolutionary behavior of both the shock and the associated first-order discontinuity is completely analyzed.
Basic equations and jump conditions across shocks
The basic equations governing the one-dimensional unsteady flow in a non-ideal gas are as follows:
where ρ is the density, u the gas velocity, p the pressure, and the sound speed with γ as the specific heats ratio of the gas; here t stands for time and x the distance being either axial in flows with planar (j = 0) geometry, or radial in cylindrically symmetric (j = 1) and spherically symmetric (j = 2) flow configurations. As system (2.1) is quasilinear with each of these equations being a direct consequence of the corresponding conservation law, one expects shocks to appear in the flow after a finite running length or time. We consider the gas motion containing a shock wave propagating into a homogeneous quiescent equilibrium gas with intrinsic velocity U given by U-1 = s′(x) = dt/dx where t = s(x) denotes the location of the shock at position x.
The specific internal energy per unit mass of the non-ideal gas which may be given by [16] is
The equation of state is taken to be of the form p(1 − bρ) = ρRT, where b is the internal volume of the gas molecules which is known in terms of the molecular interaction potential, R is the gas constant and T is the temperature. In addition, following the singular surface theory, we have the following compatibility condition
where denotes the time dervative following the shock front, [f] = f− − f+ denotes the jump in a variable f with f+ and f- being the values of f immediately ahead of and immediately behind the shock, respectively. The medium ahead of the shock front is assumed to be uniform and at rest, i.e., ρ+, ρ+, and a+ are constants, and u+ = 0. The velocities u, a, and U appearing in (2.1) and (2.2) are non-dimensionalized by a+, and the remaining variables ρ, p, x, and t are rendered dimensionless by and respectively; here, x0 characterizes the reference length of the medium. Thus, the variables appearing in (2.1) and (2.2) will henceforth be regarded as dimensionless; indeed, in the medium ahead of the shock, we have a = a+ = 1 and ρ = ρ+ = 1. The following expressions follow readily from conditions (2.2), i.e.,:
In view of (2.4), it follows that,
where μ = 2 + (γ − 1)U2.
Transport equation for shock strength using singular surface theory
In order to derive the equation for the shock strength, we take jumps in the Euler equations (2.1) and use the conditions (2.3) to (2.5) to obtain
where,
and . It may be noticed that the form (3.1) is not only convenient for algebraic manipulation but also is helpful in understanding the pattern of transport equations for higher order discontinuities.
We notice that (3.1) contains the unknown quantities [u x ], [p x ], and [ρ x ]; eliminating the unknown discontinuities [ρ x ] and [u x ] between these equations by taking a suitable linear combination, we arrive at the first transport equation governing the shock strength:
where the coefficients k11 and k12 are given by
with ν = 2γU2 + 1 − γ. We note that an immediate consequence of (3.3) cannot reveal the complete history of the evolutionary behavior of the shocks under consideration because of the appearance of an unknown entity. It is clear from (3.3) that the evolutionary behavior of the shocks at any time t depends not only on the strength of the shock, its curvature, and the specific heat ratio γ, but also on the pressure gradient [p x ] immediately behind the wave. In the following section, we determine a transport equation for the unknown [p x ], which represents the effect of disturbances that overtake the shock from behind.
Transport equation for the unknown term [p x ]
As the coupling term [p x ] in (3.3) is unknown, we need to obtain a transport equation for it. Eliminating [u x ] and [p x ] from equations (3.1) along with (3.3), we get a relation between [ρ x ] and [p x ]. Similarly, eliminating the [ρ x ] and [p x ] from equations (3.1) along with (3.3), we obtain a relation between [u x ] and [p x ].
In this section, we determine the transport equation for the unknown pressure gradient jump as described in the preceding section. We first note that from equations (3.1),
where
with
and
Under this setting, we now differentiate equations (2.1), take jumps across the shock, and use the shock conditions (2.3) and (2.4) to obtain the following system of equations:
where [V], [V x ], A, and B have the same meaning as before and
Eliminating the unknown discontinuity terms [ρ xx ] and [u xx ] between equations (4.3) and using (2.2) and (4.1), we arrive at the second transport equation that governs the discontinuity [p x ], i.e.,
where
It may be noticed from (4.4) that an analytical description of [p x ] is again obscured by the presence of higher order jump discontinuity [p xx ] which is an unknown, the determination of which requires a repetition of the above procedure; proceeding in this manner, we arrive at an open system consisting an infinite set of transport equations for the coupling terms - the jumps in higher order derivatives of p. In order to provide a natural closure on the hierarchy of these equations, we consider the coupled system (3.3) and (4.4) and render it tractable by making assumptions on the higher order discontinuity [p xx ] (see Sharma and Radha [10]).
Evolution laws for weak shocks
For a weak shock, we may assume that and consider the case, [p x ] = O(1). In this case, direct perturbation ansatz yields a uniformly valid solution to the first-order approximation. We now present these details below:
For a weak shock, it follows from (2.4) that
and thus the equations (3.3) and (4.4) can be approximated to yield
We need to solve these equations assuming that the initial conditions are [p]x = 1 = h and [p x ]x = 1 = k, where |h| is of the first-order of ϵ.
The second equation in (5.2) is the equation that governs the amplitude [p x ] of an acceleration wave; a complete analysis of such an equation modifying and generalizing several known results in the literature has been reported in [17] and [18]. We thus conclude that the precursor disturbance that overtakes the shock from behind evolves like an acceleration wave at the first order. When the effect of the first-order-induced discontinuity or the disturbances that overtake the shock from behind are strong, i.e., [p x ] = O(1) and , q > 0, system (5.2) can be directly integrated to yield
It may be noticed that if k > 0, equations (5.3) imply the following asymptotic decay laws for the shock and the associated first order discontinuity
and
as x → ∞; the asymptotic law for the shock is in full agreement with earlier results obtained using the simple wave theory (see, Whitham [19], page 330) in an ideal gas, i.e., for b = 0. The value of [p x ] ~ (x log x)− 1 which is in confirmation with Equation (9.62) at page 330 in Whitham [19] for the spherical symmetric case. It may be noticed that the decay of the induced discontinuity [p x ] is much slower than that of the decay of the shock.
Conclusion
Using kinematics of one-dimensional motion, we have derived a system of transport equations for the variation of shock strength and induced discontinuities behind shocks of weak strength traveling into quiescent non-ideal gas. It is evident from the transport equation for the shock strength that the evolutionary behavior of the shock strength is described by the shock curvature, the internal volume (b) of the gas, and the first order-induced discontinuity behind the shock.
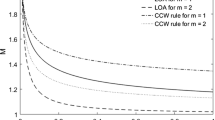
It is noticed that the transport equations for the shock strength [p] and the first-order jump discontinuity [p x ] are non-linear in [p] and [p x ], respectively; however, the transport equations for [p xx ] are linear in [p xx ], and this is true for all other higher-order jump discontinuities. The transport equation for the shock strength shows that the evolutionary behavior of the shock at any instant is influenced by the shock curvature and the first-order jump discontinuity, representing the effect of precursor disturbances that overtake the shock from behind. This transport equation, in some sense, generalizes the Chester-Chisnell-Whitham (CCW) approximation [19], although does not account for the effects of the disturbances that overtake the shock from behind, yet its success is unexpectedly remarkable for a particular class of problems. We show in the preceding section that the transport equation for the shock strength, in the limit of a weak shock and vanishing [p x ], reduces exactly to the one obtained by the CCW approximation for the ideal gas.
Indeed, a pair of transport equations for [p] and [p x ], subjected to a truncation approximation by neglecting the second-order jump discontinuity [p xx ], yields a closed system consisting of only a pair of coupled ODEs, which can be regarded as a good approximation for the hierarchy of the system governing shock evolution. These equations are then solved for uniformly valid solutions using a singular perturbation technique [19–21] that eliminates secular terms in the perturbed solution; the shock strength is assumed small, but the accompanying first-order jump discontinuity may be finite (i.e., O(1)) or small. It is shown that the disturbances evolve to the leading order like an acceleration wave.
Authors’ information
RA is an assistant professor of the Applied Mathematics Department at the Indian Institute of Technology Roorkee. He received his Ph.D. in Applied Mathematics from the Indian Institute of Technology Bombay in 2005. His research interests include the propagation of shock waves in gas dynamics. MJS is a senior research fellow of the Applied Mathematics in the Department of Applied Science and Engineering at the Indian Institute of Technology Roorkee. His research interests include the hyperbolic conservation laws.
References
Maslov VP: Propagation of shock waves in an isentropic nonviscous gas. J. Sov. Math 1980, 13: 119–163. 10.1007/BF01084111
Grinfeld MA: Ray method of calculating the wavefront intensity in nonlinearly elastic materials. PMM 1978, 42: 958–977.
Anile AM: Propagation of weak shock waves. Wave Motion 1984, 6: 571–578. 10.1016/0165-2125(84)90047-7
Straughan B: Applied Mathematics and Science Series, vol. 165: Stability and Wave Motion in Porous Media. New York: Springer; 2008.
Straughan B: Acoustic waves in Cattaneo-Christov gas. Physics Letters A 2010, 374: 2667–2669. 10.1016/j.physleta.2010.04.054
Jordan PM: Growth and decay of acoustic acceleration waves in a Darcy-type porous media. Proc. R. Soc. Lond. A 2005, 461: 2749–2766. 10.1098/rspa.2005.1477
Jordan PM: Growth, decay and bifurcation of shock amplitudes under type II flux law. Proc. R. Soc. Lond. A 2007, 463: 2783–2798. 10.1098/rspa.2007.1895
Radha C, Sharma VD, Jeffrey A: An approximate analytical method for describing the kinematics of a bore over a sloping beach. Appl. Anal. 2002, 81: 867–892. 10.1080/0003681021000004474
Pandey M, Sharma VD: Kinematics of a shock wave of arbitrary strength in a non-ideal gas. Q. Appl. Math. 2009, 67: 401–419.
Sharma VD, Radha C: On one dimensional planar and non-planar shock waves in a relaxing gas. Phys. Fluids 1994, 6: 2177–2190. 10.1063/1.868220
Batt J, Ravindran R: Calculation of shock using solutions of systems of ordinary differential equations. Q. Appl. Math. 2005, 63: 721–746.
Sharma VD, Venkatraman R: Evolution of weak shocks in one dimensional planar and non-planar gas dynamic flows. Int. J. of Non-Linear Mech 2012, 47: 918–926. 10.1016/j.ijnonlinmec.2012.06.001
Parker DF: Nonlinearity, relaxation and diffusion in acoustics and ultrasonics. J. Fluid Mech. 1969, 39: 793–815. 10.1017/S0022112069002473
Parker DF: An asymptotic theory for oscillatory nonlinear signals. IMA J. Appl. Math. 1971, 7: 92–110. 10.1093/imamat/7.1.92
Seymour BR, Mortell MP: Nonlinear geometrical acoustics. In Mechanics Today, vol 2. Edited by: Nemat-Nasser S. Oxford: Pergamon Press; 1975:251–312.
Vishwakarma JP, Nath G: Similarity solutions for the flow behind an exponential shock in a non-ideal gas. Meccanica 2007, 42: 331–339. 10.1007/s11012-007-9058-6
Sharma VD, Menon VV: Further comments on the behavior of acceleration waves of arbitrary shape. J. Math. Phys. 1981, 22: 683–684. 10.1063/1.524977
Menon VV, Sharma VD, Jeffrey A: On the general behavior of acceleration waves. Appl. Anal. 1983, 16: 101–120. 10.1080/00036818308839462
Whitham GB: Linear and Nonlinear Waves. New York: Wiley; 1974.
Nayfeh AH: Perturbation Methods. New York: Wiley; 1973.
Sharma VD: Quasilinear Hyperbolic Systems and Conservation Laws. New York: CRC Press; 2010.
Acknowledgment
Research funding from the Department of Science and Technology (DST), India vide Project grant number SR/FTP/MS-12/2008 is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interest
The authors declare that they have no competing interests.
Authors’ contributions
RA and MJS worked together from formulating the problem to finding its solution. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Arora, R., Siddiqui, M.J. Evolutionary behavior of weak shocks in a non-ideal gas. J Theor Appl Phys 7, 14 (2013). https://doi.org/10.1186/2251-7235-7-14
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/2251-7235-7-14