
Abstract
In this paper, we show a procedure for solving multilevel fractional programming problems in a large hierarchical decentralized organization using fuzzy goal programming approach. In the proposed method, the tolerance membership functions for the fuzzily described numerator and denominator part of the objective functions of all levels as well as the control vectors of the higher level decision makers are respectively defined by determining individual optimal solutions of each of the level decision makers. A possible relaxation of the higher level decision is considered for avoiding decision deadlock due to the conflicting nature of objective functions. Then, fuzzy goal programming approach is used for achieving the highest degree of each of the membership goal by minimizing negative deviational variables. We also provide sensitivity analysis with variation of tolerance values on decision vectors to show how the solution is sensitive to the change of tolerance values with the help of a numerical example.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Background
Hierarchical optimization or multilevel programming problems (MLPPs) have the following common characteristics: interactive decision making units exist within predominantly hierarchical structures; the execution of decision is sequential from higher level to lower level; each decision-making unit independently controls a set of decision variables and is interested in maximizing its own objective but is affected by the reaction of lower level decision makers (DMs). Due to their dissatisfaction with the decision of the higher level DMs, decision deadlock arises frequently in the decision-making situation. Multilevel fractional programming problems (MLFPPs) involve objective functions in fractional form, i.e., at each level with the assumption that the denominator of objectives remains positive at each level in the feasible region. Some important existing solution approaches such as the extreme point search, the procedure based on the Karush-Kuhn Tucker condition, and the decent method (Anandilingam 1988Anandilingam and Apprey 1991Biswas and Pal 2005Bellmann 1957Charnes and Cooper 1962Craven and Mond 1975Lai 1996) are effective only for solving simple types of multilevel programming problems. Initially, fuzzy approach was used to handle multiobjective optimization problems (Chakraborty and Gupta 2002Jimenez and Bilbas 2009).Lai and Hwang (1993) at first developed an effective fuzzy approach using the concept of tolerance membership functions for solving MLPPs in 1996. Shih et al. (1996) extended Lai’s concept using a non-compensatory maximum-minimum aggregation operator for solving MLPPs.Shih and Lee (2000) further extended Lai’s concept by introducing the compensatory fuzzy operator for solving MLPPs.Sinha (2003 a,b) studied alternative MLP techniques based on fuzzy mathematical programming (FMP). The basic concept of these fuzzy approaches is the same, and evaluation of the problem again and again by redefining the elicited membership values is essentially needed in the solution search process to obtain a satisfactory solution. So, computational load is also inherently involved in the fuzzy approaches developed so far. In the FMP techniques ofSinha (2003a, b), the last (lower) level is the most important, and the decision of the lowest level remains either unchanged or closest to individual best decisions, which leads to the paradox that the decision power of the lowest level DM dominates the higher level DM. To overcome such difficulties, the fuzzy goal programming (FGP) approach to multidecision-making problems was introduced byMohamed (1997) which is extended byPramanik and Roy (2007) to solve MLPPs.Baky (2009) used fuzzy goal programming to solve decentralized bilevel multiobjective programming problems.Chang (2009) suggested goal programming approach for fuzzy multiobjective fractional programming problems. Recently,Pal and Gupta (2009) studied a genetic algorithm to fuzzy goal programming formulation of fractional multiobjective decision-making problems.
In real-world decision-making situations, decision makers sometimes may be faced with the decision to optimize inventory/sales, actual cost/standard cost, output/employee, etc. with respect to some constraints. Such type of problems in a large hierarchical organization from higher level to lower level and their sequential decisions on complex and conflicting objectives formulate the MLFPPs. Practical optimization situations involving multilevel with fractional objectives have been rare, but such problems can be encountered in the most complex design, pattern recognition, control theory, and resource allocation situations (Mohamed 1997). Motivated by the concept of interactive fuzzy goal programming and fractional programming, an effort has been made to examine the possibility of unifying the level-wise (hierarchical) and stage-wise operations with the assumption of a positive denominator of objective functions at each level. The aim of this paper is to present a procedure to solve multilevel fractional programming problems. Our proposed methodology involves the fuzzy goal levels of the numerator and denominator part of each objective as well as decision vectors controlled by the higher level DMs, which are determined by individual optimal solutions. Then, the fuzzy goals are characterized by the associated membership functions which are transformed into fuzzy flexible membership goals by means of introducing negative and positive deviational variables and assigning a higher membership value (unity) as aspiration level to each of them. Since overdeviation from any fuzzy goal implies the full achievement of the membership values, we assign only negative deviational variables to the achievement function and minimize negative deviational variables to get a compromise optimal solution. To illustrate our proposed method, we solve a numerical example and compare the results with the change in tolerance limits.
The paper is organized as follows: In the ‘Formulation of MLPP’ section, we discuss formulation of MLFPP and the related terminology. In the ‘Fuzzy programming formulation of MLFPP’ section, we characterize the linear membership functions for the numerator and denominator of objective functions at each level as well as decision vectors controlled by the higher level DMs. In the next section, we discuss the proposed FGP approach to tackle MLFPPs and formulate different mathematical models related to it. In the ‘Selection of compromise solution’ section, selection criteria of compromise optimal solution are described. To illustrate the proposed methodology, a numerical example is considered and sensitivity analysis is performed with the change in tolerance limits in the ‘Numerical example’ section. Concluding remarks are given in the last sections.
Results and discussion
Formulation of MLFPP
We consider a T-level fractional programming problem of maximization-type objectives at each level. Mathematically, we can state it as follows:
subject to
decision variables are under the control of the first level DM; decision variables are under the control of the t-level DM.
Where denotes transposition, and are m row vectors, each with dimension . is a column vector of dimension . are row vectors of dimension . Similarly, and are row vectors of dimension . We take and . Here, one DM is located on each level. Decision vector is the control of the t- th level DM having number of decision variables. Here, it is assumed that the denominator of objective functions is positive at each level for all the values of decision variables in the constraint region.
Fuzzy programming formulation of MLFPP
To formulate the fuzzy programming model of MLFPP, the objective numerator and objective denominator at each level and the decision vector would be transformed into fuzzy goals by means of assigning an aspiration level to each of them. Then, they are to be characterized by the associated membership functions by defining tolerance limits for the achievement of the aspired levels of the corresponding fuzzy goals.
Characterization of membership function of MLFPP
In the decision-making context, each DM is interested in maximizing his or her own objective function; the optimal solution of each DM when calculated in isolation would be considered as the best solution, and the associated objective values can be considered as the aspiration level of the corresponding fuzzy goal. Let be the best solution of the t-th level DM. It is quite natural that objective values which are equal to or larger than should be absolutely satisfactory to the t-th level DM. If the individual best solutions are the same, then a satisfactory optimal solution of the system is reached. However, this rarely happens due to the conflicting nature of the objectives. To obtain a satisfactory solution, the higher DM should give some tolerance (relaxation), and the relaxation of the decision of the higher level DM depends on the needs, desires, and practical situations in the decision-making situation. Then, the fuzzy goals take the form
and .
To build membership functions, fuzzy goals and tolerance should be determined first. However, they could hardly be determined without meaningful supporting data. Using the individual best solution, we find the values of all the numerator objective functions and denominator objective functions at each best solution and construct a payoff matrix as follows:
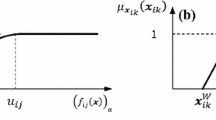
Here, are assumed to be the main decision vectors. The maximum value of each column and give upper tolerance limit or aspired level of achievement for the t-th numerator objective function and denominator objective function, respectively, where . The minimum value of each column gives the lower tolerance limit or lowest acceptable level of achievement for the t-th numerator objective function and denominator objective function, respectively, where .. Then, the linear membership functions for the defined fuzzy goals are as follows (see also Figures 1 and 2):

Figure 1

Figure 2
Here, linear membership functions are more suitable than nonlinear functions as less computational difficulties arise in models due to it. Let be the negative and positive tolerance values on decision vectors considered by the t-th level DM. This is a triangular fuzzy number. Then, the linear membership functions for decision vectors can be formulated as follows:
Here, and are the negative and positive tolerance vectors; and are not necessarily same. Generally, lies between and . DMs may prefer to shift the range of which may be the left of or the right of , only depending on the needs and desires of the higher level DMs in the decision-making situation. Then, the membership function becomes one-sided. For example, if , then should lie on the right of . Then, the DM should assign and . If the DM wants the shift towards the left of , then should be assigned a positive value while should be assigned a negative value, i.e., , , and . Similarly, if the shift is required to the right of , then the DM should assign , , and . We may treat the tolerance as variables with the restrictions that (so that the value of the variables remain non-negative).
FGP solution approach
FGP is an extension of conventional goal programming (GP) introduced byCharnes and Cooper (1962). GP has been extensively studied and widely circulated in literature (Arora and Gupta 2009Pramanik and Roy 2007). In this paper, GP approach to fuzzy multiobjective decision-making problems introduced byMohamed (1997) is extended to solve MLFPP problems. In a decision-making situation, the aim of each DM is to achieve the highest membership value (unity) of the associated fuzzy goal in order to obtain the absolute satisfactory solution. However, in real practice, achievement of all membership values to the highest degree (unity) is not possible due to conflicting objectives. Therefore, the decision policy for minimizing the regrets of the DMs for all the levels should be taken into consideration. Then, each DM should try to maximize his or her membership function by making them as close as possible to unity by minimizing its negative deviational variables. Therefore, in effect, we are simultaneously optimizing all the objective functions. So, for the defined membership functions in Equations 3, 4, and 5, the flexible membership goals having the aspired level unity can be represented as follows:
Here, are negative deviational variables, and are positive deviational variables; represent the vector of negative deviational and positive deviational variables. It is to be noted that any overdeviation from a fuzzy goal implies the full achievement value. Then, Equations 6, 7, and 8 can be written as follows:
FGP formulation can be presented as follows:
Model I: Find so as to minimize subject to
The above problem can be rewritten as follows:
Minimize subject to
Here, are negative deviational variables. represent the vector of underdeviational variables. is the column vector having all components equal to 1, and its dimension depends on .
Model IIa: Find so as to minimize
Model IIb: Find so as to minimize
subject to
Here, are negative deviational variables. represents the vector of underdeviational variables. The numerical weights are taken as , , and . is the column vector having all components equal to 1, and its dimension depends on . The above problem in models IIa and IIb can be rewritten as follows:
Minimize
Minimize
subject to
Here, are negative deviational variables. and represent the vector of underdeviational variables. , and . is the column vector having all components equal to 1, and its dimension depends on . By solving Equation 15, if the DMs are satisfied with this solution, then a satisfying solution is reached. Otherwise, higher level DMs should provide new tolerance limits for the control variable until a satisfying solution is reached. In general, considering a set of positive relaxation offered by the higher level DMs, the solution of Equation 15 becomes satisfying for all the level DMs.
Numerical example
Let us consider the following tri-level linear fractional programming problem as
subject to
and .
We find the best optimal solution, , , , and . Similarly, ,, and .
Let the first level DM decide that with −2 (negative) and +2 (positive) tolerance limits and with −6.43 (negative) and +6.43 (positive) tolerance limits. Let the second level DM decide that with −1 (negative) and +1 (positive) tolerance limits.
Then, following the procedure, FGP model I gives the problem as follows:
subject to
and
Solving the above programming problem using nonlinear packages (as shown in Figure 3a,b), we obtain solution and ; and and .

Description (a) and solution (b) of example 1 with model I in LINDO 10.0 (trial version).
Model IIb: Find so as to minimize
subject to
and
Solving the above FGP model problem using nonlinear packages (as shown in Figure 4a,b), we obtain solution , , , and ; and , , and (see Table 1 for a comparison of Euclidean distance and Table 2 for the solution set of example 1).

Description (a) and solution (b) of example 1 with model IIb in LINDO 10.0 (trial version).
Conclusion
An effort has been made to solve the multilevel fractional programming problem based on the fuzzy set theory and goal programming approach. The main advantage of the proposed approach is that computational complexity is reduced by defining separate membership functions for numerator and denominator functions of objectives at each level, but tolerance values (positive and negative) are chosen so that the satisfying solution is forced towards the optimal solutions. However, the main difficulties of these methods are the following: (1) Preference information required from the DM cannot easily be given, particularly when the information thus required is large and complex and/or the objective functions in fractional form are measured on different scales, and (2) if DMs are not satisfied with solution, then higher level DMs should provide new tolerance limits for the control variables until a satisfying solution is reached.
Besides this, the proposed methodology can be easily reduced to the solution procedure as given by [Sinha (2003]b) and [Pramanik and Roy (2007]) for the multilevel linear programming case by avoiding the goal membership functions for denominators of objectives and corresponding goal variables.
Methods
Selection of compromise solution
The concept of utopia point (the ideal point) and the use of distance function for group decision analysis was first studied by [Yu (1973]). [Biswas and Pal (2005]) used the Euclidean distance function to select the appropriate priority structure in the application of fuzzy goal programming technique to land use planning in the agricultural system. Here, different FGP models provide different optimal solutions. The Euclidean distance function is used only to identify which FGP model (model I, model IIa, and model IIb) offers a better optimal solution. In the FGP formulation, since the aspired level of each of the membership function goals is unity, the point consisting of the highest membership value of each of the goals would represent the ideal point. The Euclidean distance function can be defined in this case as follows:
where and represent the achieved membership value of the t-th numerator and denominator objective goals, respectively. The solution for which D2 is minimum would be the most satisfying solution.
References
Anandilingam G: A mathematical programming model of decentralized multi-level system. J Oper Res Soc 1988,39(11):1021-1033.
Anandilingam G, Apprey V: Multi-level programming and conflicting resolution. European Journal of Operational Research 1991, 51: 233-247. 10.1016/0377-2217(91)90253-R
Arora SR, Gupta R: Interactive fuzzy goal programmings approach for bilevel programming problem. European Journal of Operational Research 2009, 194: 368-376. 10.1016/j.ejor.2007.12.019
Baky IA: Fuzzy goal programming algorithm for solving decentralized bilevel multiobjective programming problems. Fuzzy Sets and Systems 2009, 160: 2701-2710. 10.1016/j.fss.2009.02.022
Bellmann RE: Dynamic programming. Princeton University Press, Princeton; 1957.
Biswas A, Pal BB: Application of fuzzy goal programming technique to land use planning in agriculture systems. Omega 2005, 33: 391-398. 10.1016/j.omega.2004.07.003
Chakraborty M, Gupta S: Fuzzy mathematical programming for multi objective linear fractional programming problem. Fuzzy Sets and Systems 2002, 125: 335-342. 10.1016/S0165-0114(01)00060-4
Chang CT: A goal programming approach for fuzzy multiobjective fractional programming problems. International Journal of System Sciences 2009, 40: 867-874. 10.1080/00207720902974538
Charnes A, Cooper WW: Programming with linear fractional functional. Nov Res Logistics Quart 1962, 9: 181-186. 10.1002/nav.3800090303
Craven BD, Mond B: On fractional programming and equivalence. Nov Res Logistics Quart 1975, 22: 405-410. 10.1002/nav.3800220216
Jimenez M, Bilbas A: Pareto optimal solutions in fuzzy multi-objective linear programming. Fuzzy Sets and Systems 2009, 160: 2714-2721. 10.1016/j.fss.2008.12.005
Lai YJ: Hierarchical optimization: a satisfactory solution. Fuzzy Sets and Systems 1996, 77: 321-335. 10.1016/0165-0114(95)00086-0
Lai YJ, Hwang CL: Fuzzy mathematical programming methods and applications. Springer, Berlin; 1993.
Mohamed RH: The relationship between goal programming and fuzzy programming. Fuzzy Sets and Systems 1997, 89: 215-222. 10.1016/S0165-0114(96)00100-5
Pal BB, Gupta S: A genetic algorithm to fuzzy goal programming formulation of fractional multiobjective decision making problem. In Proceeding of 1st International Conference on Advanced Computing (ICAC). Chennai; December 2009.
Pramanik S, Roy TK: Fuzzy goal programming approach to multilevel programming problems. European Journal of Operational Research 2007, 176: 1151-1166. 10.1016/j.ejor.2005.08.024
Shih HS, Lee ES: Compensatory fuzzy multiple decision making. Fuzzy Sets and Systems 2000, 14: 71-87.
Shih HS, Lai YJ, Lee ES: Fuzzy approach for multi-level programming problems. Computer and Operation Research 1996, 23: 73-91. 10.1016/0305-0548(95)00007-9
Sinha S: Fuzzy mathematical programming applied to multi-level programming problems. Computers & Operations Research 2003, 30: 1259-1268. 10.1016/S0305-0548(02)00061-8
Sinha S: Fuzzy programming approach to multi-level programming problems. Fuzzy Sets and Systems 2003, 136: 189-202. 10.1016/S0165-0114(02)00362-7
Yu PL: A class of solutions for group decision problems. Management Sciences 1973, 19: 936-946. 10.1287/mnsc.19.8.936
Acknowledgements
The authors are indebted to the anonymous referee for the encouraging comments and valuable suggestions, which have improved the presentation of the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
KL carried out discussion related to formulation of MLFPP, related terminology, Characterization of linear membership functions for the numerator and denominator functions at each level as well as decision vector. KL proposed FGP approach to tackle MLFPPs and formulate different mathematical models related to it and also illustrate proposed methodology with a numerical example and show sensitivity analysis performed on it. MPP described the use of selection criteria of compromise solution for MLFPPs. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Lachhwani, K., Poonia, M.P. Mathematical solution of multilevel fractional programming problem with fuzzy goal programming approach. J Ind Eng Int 8, 16 (2012). https://doi.org/10.1186/2251-712X-8-16
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/2251-712X-8-16